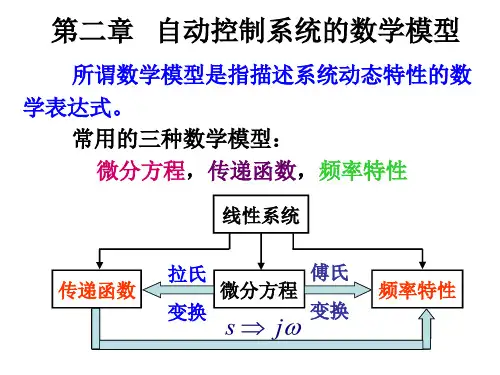
第二章 数学模型微分方程
- 格式:ppt
- 大小:3.64 MB
- 文档页数:96


第二章控制系统的数学模型第3讲非线性微分方程的线性化王燕舞为什么要进行线性化?严格的说,几乎所有元件或系统的运动方程都是非线性方程,即输入、输出和扰动等之间的关系都是非线性的。
非线性微分方程的求解和控制系统性能研究非常复杂,而线性化后的模型可借助叠加原理的性质,简化系统分析。
因此,研究非线性微分方程的线性化具有较强的工程实用价值。
什么是非线性数学模型的线性化?在一定的条件下或在一定范围内把非线性的数学模型化为线性模型的处理方法。
符合什么条件的系统可以进行线性化呢?▪条件1: 小偏差理论或小信号理论。
在工程实践中,控制系统都有一个额定的工作状态和工作点,当变量在工作点附近作小范围的变化时,就满足这个条件。
▪条件2: 在工作点附近存在各阶导数或偏导数。
如何进行线性化呢?假设微分方程模型中包含非线性函数f(x)如图所示。
设y=f(x),假设系统在工作点(x 0, y 0), y 0=f(x 0) 附近变化,且在该工作点处各阶导数均存在,在(x 0, y 0)附近将y 展开成泰勒级数:)()()()(000xx x x x f x f x f y -⎥⎦⎤⎢⎣⎡∂∂+==若偏差Δx=x-x 0很小,可忽略级数中高阶无穷小项,上式化为)()()()()()(00000x xK x f x x x x x f x f x f y -+=-⎥⎦⎤⎢⎣⎡∂∂+≈=K 表示y=f(x)曲线在(x 0,y 0)处切线的斜率。
因此非线性函数在工作点处可以用该点的切线方程线性化。
yy=f(x)y 0x 0x ⋯+-⎥⎦⎤⎢⎣⎡∂∂+20022)()(!21x x x x x f xK x f x f y y y ∆=-=-=∆)()(00如何进行线性化呢?小偏差法:在给定工作点的邻域将非线性函数展开为泰勒级数,忽略级数中的高阶项,得到只包含偏差的一次项的线性方程。
液位流体过程。
如图,Q1为流入量,也是输入量;Q 2为流出量;h 为液位高度,为系统输出;C 为液缸的截面积。
第⼆章动⼒学系统的微分⽅程模型第⼆章:动⼒学系统的微分⽅程模型利⽤计算机进⾏仿真时,⼀般情况下要给出系统的数学模型,因此有必要掌握⼀定的建⽴数学模型的⽅法。
在动⼒学系统中,⼤多数情况下可以使⽤微分⽅程来表⽰系统的动态特性,也可以通过微分⽅程可以将原来的系统简化为状态⽅程或者差分⽅程模型等。
在这⼀章中,重点介绍建系统动态问题的微分⽅程的基本理论和⽅法。
在实际⼯程中,⼀般把系统分为两种类型,⼀是连续系统;其数学模型⼀般是⾼阶微分⽅程;另⼀种是离散系统,它的数学模型是差分⽅程。
§2.1 动⼒学系统统基本元件任何机械系统都是由机械元件组成的,在机械系统中有3种类型的基本机械元件:惯性元件、弹性元件和阻尼元件。
1 惯性元件:惯性元件是指具有质量或转动惯量的元件,惯量可以定义为使加速度(或⾓加速度)产⽣单位变化所需要的⼒(或⼒矩)。
惯量(质量)=)加速度(⼒(2/)s m N 惯量(转动惯量)=)⾓加速度(⼒矩(2/)s rad m N ?2 弹性元件:它在外⼒或外⼒偶作⽤下可以产⽣变形的元件,这种元件可以通过外⼒做功来储存能量。
按变形性质可以分为线性元件和⾮线性元件,通常等效成⼀弹簧来表⽰。
对于线性弹簧元件,弹簧中所受到的⼒与位移成正⽐,⽐例常数为弹簧刚度k 。
x k F ?=这⾥k 称为弹簧刚度,x ?是弹簧相对于原长的变形量,弹性⼒的⽅向总是指向弹簧的原长位移,出了弹簧和受⼒之间是线性关系以外,还有所谓硬弹簧和软弹簧,它们的受⼒和弹簧变形之间的关系是⼀⾮线性关系。
3 阻尼元件:这种元件是以吸收能量以其它形式消耗能量,⽽不储存能量,可以形象的表⽰为⼀个活塞在⼀个充满流体介质的油缸中运动。
阻尼⼒通常表⽰为:αxc R = 阻尼⼒的⽅向总是速度⽅向相反。
当1=α,为线性阻尼模型。
否则为⾮线性阻尼模型。
应注意当α等于偶数情况时,要将阻尼⼒表⽰为:||1--=αx xc R 这⾥的“-”表⽰与速度⽅向相反§2.2 动⼒学建模基本定理1 动⼒学普遍定理对于⼤多数⼒学问题,可以使⽤我们熟知的⽜顿动⼒学基本定理来解决,动⼒学普遍定理包括动量定理、动量矩定理和动能定理,以及其他变形形式,普遍定理的特点是⽐较直观,针对不同的问题可以选择不同的⼒学定理,在⼀般情况下利⽤普遍定理可以得到⼤多数动⼒学系统的数学模型。