多极旋变
- 格式:pdf
- 大小:144.98 KB
- 文档页数:5

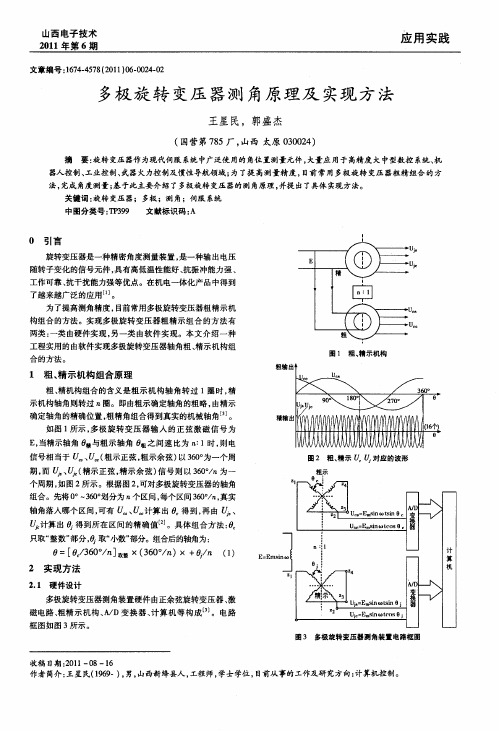
磁阻式多极旋转变压器的工作原理普通旋转变压器的精度较低,为角分的数量级,一般应用于精度要求不高或大型机床的粗测和中测系统中。
为提高精度,近年来数控系统中广泛采用磁阻式多极旋转变压器。
磁阻式多极旋转变压器(又称细分解算器,或游标解算器),它是一种多极角度传感元件,实际上是一种非接触式磁阻可变的耦合变压器,其结构与传统的多极旋转变压器不同之处在于其励磁绕组和输出绕组均安置在定子铁心的槽中,转子仅由带齿的选片叠制而成,不放任何绕组,实现无接触运行。
定子冲片内圆冲制有若干大齿(也称为极靴),每个大齿上又冲制若干等分小齿,绕组安放在大齿槽中。
转子外圆表面冲制有若干等分小齿,其数与擞对数相等。
输出和输入绕组均为集中绕制,其正余弦绕组的匝数控正弦规律变化。
而传统结构的多极旋转变压器是采用分布式绕组。
图6-4所示为磁阻式多极旋转变压器的原理示意图,其中画出了5个定子齿,4个转于齿。
定子槽内安置了逐槽反向串接的输入绕组1-1和两个间隔绕制反向串接的输出绕组2-2,3-3。
当给输入绕组1-1加上交流正弦电压时,两个输出绕组2-2、3-3中分别得到两个电压,其幅值主要取决于定子和转子齿的相对位置间气隙磁导的大小。
当转子相对定子转动时,空间的气隙磁导发生变化,转子每转过一个转子齿距,气隙磁导变化一个周期;而当转子转过一周时,气隙磁导变化的周期数等于转子齿数。
这样,转子的齿数就相当于磁阻式多极旋转变压器极对数,从而达到多极的效果。
气隙磁导的变化,导致输入和输出绕组之间互感的变化,输出绕组感应的电势亦发生变化。
实际应用中是通过输出电压幅值的变化而测得转子的转角的。
磁阻式多极旋转变压器没有电刷和滑环接触,工作可靠、抗冲击能力强,并能连续高速运行、寿命长,多用于高精度及各种控制式电气变速双通道系统,提高数控机床定位精度。
尽管它的测量精度不如感应同步器和光栅,但高于普通旋转变压器,误差不超过3.5角秒,而且成本低,不需维修,输出信号电平高(0.5—1.5V.最高可达4V),所以在数控机床上的应用很有前途。

旋转变压器的结构与工作方式(转载)旋转变压器的结构_旋转变压器的工作方式时间:2015-09-16 20:47:21编辑:电工栏目:变压器与电机导读:有关旋转变压器的结构,旋转变压器一般有两极绕组和四极绕组两种结构形式,常采用四极绕组式旋转变压器,此类结构形式的旋转变压器可分为鉴相式和鉴幅式两种工作方式。
旋转变压器的结构_旋转变压器的工作方式一、旋转变压器的结构与工作原理旋转变压器一般有两极绕组和四极绕组两种结构形式。
两极绕组旋转变压器的定子和转子各有一对磁极,四极绕组则各有两对磁极,主要用于高精度的检测系统。
除此之外,还有多极式旋转变压器,用于高精度绝对式检测系统。
在实际应用中,考虑到使用的方便性和检测精度等因素,常采用四极绕组式旋转变压器。
这种结构形式的旋转变压器可分为鉴相式和鉴幅式两种工作方式。
1、鉴相工作方式如图2-20所示为四极旋转变压器,给定子的两个绕组分别通以同幅、同频但相位相差π/2的交流励磁电压,即:u1 s=UmSinωtu1 c=UmCosωt(2—1)在转子绕组的其中一个绕组接一高阻抗,它不作为旋转变压器的测量输出,主要起平衡磁场的作用,目的是为了提高测量精度。
这两个励磁电压在转子的另一绕组中都产生了感应电压,并叠加在一起,因而转子中的感应电压应为这两个电压的代数和,即:u2=ku1 s Sinθ+ku1 c Cosθ=kUmSinωt Sinθ+kUmCosωt Cosθ=kUmCos(ωt -θ)(2—2)同理,假如转子逆向转动,可得:u2=kUmCos(ωt +θ) (2—3)由式(2—1)和(2—2)可见,旋转变压器转子绕组中的感应电势u2与定子绕组中的励磁电压同频率,但相位不同,其差值为θ。
而θ角正是被测位移,故通过比较感应电势u2 与定子励磁电压输出电压u1 c的相位,便可求出θ。
2、鉴幅工作方式给定子的两个绕组分别通以同频率、同相位但幅值不同的交变励磁电压,即:u1 s =Us m Sinωtu1c =Uc m Sinωt(2—4)其中,幅值分别为正弦、余弦函数,即:Us m =UmSinαUc m =UmCosα式中α角可改变,称为旋转变压器的电气角。

基于双通道旋转变压器的高精度测角系统设计崔建飞;孙凤鸣【摘要】为实现伺服电机驱动回旋机构应用中的角秒级的角度测量精度.选用电气误差小于±10″的无刷双通道旋转变压器作为角度位置传感器,设计了双通道旋转变压器的激励及解算电路,通过数字信号处理器(Digital SignalProcessor,DSP)TMS320F28335读取解算电路输出的角度位置.与传统的无刷双通道旋转变压器角度解算电路相比较,可以有效减少软件算法中数据整合和纠错部分的工作量.实验结果表明该系统能稳定输出高质量的角度位置指示信号.适用于伺服电机定位控制等需要高精度角度位置反馈的场合,具有可靠性高、精度高、软件开销少的优点.%The aim of this study was to implement high precision angel measurement of rotary device. Two speed resolver which electrical error is less than ± 10″ was utilized to as angle position angle. Powering and decoding circuits were designed for the two speed resolver. The angle information was then read by Digital Signal Processor (DSP)TMS320F28335. Compared with other decoding methods of two speed resolver,this study can reduce software consumption on data integration and error correction. The results we obtained demonstrate this system could output high quality angle position indication signal with features of high precision,high reliability and simply coding.【期刊名称】《电子设计工程》【年(卷),期】2018(026)011【总页数】5页(P136-139,144)【关键词】角度测量;双通道旋转变压器;双通道轴角数字转换模块;TMS320F28335【作者】崔建飞;孙凤鸣【作者单位】天津津航计算技术研究所天津300300;天津市航空电子综合显示控制重点实验室天津300300;天津津航计算技术研究所天津300300;中国民航大学中欧航空工程师学院,天津300300【正文语种】中文【中图分类】TN79+2在运动系统的精密控制领域,角度位置的测量至关重要,常用的角度位置传感器包括光电编码器[1]、霍尔传感器[2]、旋转变压器[3](以下简称旋变)等种类。

第一大题:旋转变压器结构 旋转变压器的结构和两相绕线式异步电机的结构相似,可分为定子和转子两大部分。
定子和转子的铁心由铁镍软磁合金或硅钢薄板冲成的槽状心片叠成。
它们的绕组分别嵌入各自的槽状铁心内。
定子绕组通过固定在壳体上的接线柱直接引出。
转子绕组有两种不同的引出方式。
根据转子绕组两种不同的引出方式,旋转变压器分为有刷式和无刷式两种结构形式。
图1是有刷式旋转变压器。
它的转子绕组通过滑环和电刷直接引出,其特点是结构简单,体积小,但因电刷与滑环是机械滑动接触的,所以旋转变压器的可靠性差,寿命也较短。
图1 有刷式旋转变压器图2是无刷式旋转变压器。
它分为两大部分,即旋转变压器本体和附加变压器。
附加变压器的原、副边铁心及其线圈均成环形,分别固定于转子轴和壳体上,径向留有一定的间隙。
旋转变压器本体的转子绕组与附加变压器原边线圈连在一起,在附加变压器原边线圈中的电信号,即转子绕组中的电信号,通过电磁耦合,经附加变压器副边线圈间接地送出去。
这种结构避免了电刷与滑环之间的不良接触造成的影响,提高了旋转变压器的可靠性及使用寿命,但其体积、质量、成本均有所增加。
89作业文本格式一般,内容丰富多彩图2 无刷式旋转变压器目前无刷旋转变压器有两种结构形式。
一种称作为环形变压器式无刷旋转变压器,另一种称作为磁阻式旋转变压器。
1)环形变压器式旋转变压器图1示出环形变压器式无刷旋转变压器的结构。
这种结构很好地实现了无刷、无接触。
图中右侧部分是典型的旋转变压器的定、转子,在结构上和有刷旋转变压器一样的定、转子绕组,作信号变换。
左侧是环形变压器。
它的一个绕组在定子上,一个在转子上,同心放置。
转子上的环形变压器绕组和作信号变换的转子绕组相联,它的电信号的输入输出由环形变压器完成。
2)磁阻式旋转变压器图2是一个10对极的磁阻式旋转变压器的示意图。
磁阻式旋转变压器的励磁绕组和输出绕组放在同一套定子槽内,固定不动。
但励磁绕组和输出绕组的形式不一样。
旋转变压器工作原理摘要:本文介绍了虽然目前已逐渐被广泛应用,但仍未被人们所熟悉的,角度位置传感元件—旋转变压器。
文章对旋转变压器的发展、结构、原理、参数与性能指标及其信号变换做了简单的介绍;最后对几种类型旋转变压器的各方面作了比较,以供选择、使用时参考。
曲家骐:上海赢双电机有限公司旋转变压器介绍⒈概述⒈⒈旋转变压器的发展旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。
早期的旋转变压器用于计算解答装置中,作为模拟计算机中的主要组成部分之一。
其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。
这些函数是最常见的,也是容易实现的。
在对绕组做专门设计时,也可产生某些特殊函数的电气输出。
但这样的函数只用于特殊的场合,不是通用的。
60年代起,旋转变压器逐渐用于伺服系统,作为角度信号的产生和检测元件。
三线的三相的自整角机,早于四线的两相旋转变压器应用于系统中。
所以作为角度信号传输的旋转变压器,有时被称作四线自整角机。
随着电子技术和数字计算技术的发展,数字式计算机早已代替了模拟式计算机。
所以实际上,旋转变压器目前主要是用于角度位置伺服控制系统中。
由于两相的旋转变压器比自整角机更容易提高精度,所以旋转变压器应用的更广泛。
特别是,在高精度的双通道、双速系统中,广泛应用的多极电气元件,原来采用的是多极自整角机,现在基本上都是采用多极旋转变压器。
旋转变压器是目前国内的专业名称,简称“旋变” 。
俄文里称作“Вращающийся Трансформатор” ,词义就是“旋转变压器”。
英文名字叫“resolver”,根据词义,有人把它称作为“解算器”或“分解器”。
作为角度位置传感元件,常用的有这样几种:光学编码器、磁性编码器和旋转变压器。
由于制作和精度的缘故,磁性编码器没有其他两种普及。
光学编码器的输出信号是脉冲,由于是天然的数字量,数据处理比较方便,因而得到了很好的应用。
早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。
光电编码器与旋转变压器的区别一、 旋转变压器优点:1、结构简单,坚固耐用,维护方便,非接触式结构,定子和转子分开安装;2、对机械和电气噪音不敏感,抗干扰能力好,具有很高的可靠性;3、高速性能优秀,可配置到60000rpm的电机上;4、绝对值零点位置,电机旋转一圈产出一个正余弦波;5、能应用在各种恶劣环境中,具有防尘、防油、防敲击等特点。
旋转变压器是自动控制装置中的一类精密控制微电机。
从物理本质看,可以认为是一种可以旋转的变压器,这种变压器的原、副边绕组分别放置在定子和转子上。
当旋转变压器的原边施加交流电压励磁时,其副边输出电压将与转子的转角保持某种严格的函数关系,从而实现角度的检测、解算或传输等功能。
注:最大的应用在主轴定位中,因为绝对值零点位置,主轴定位时不再像光电编码器要寻找到Z相信号再执行定位,也不会出现因Z相受到干扰造成主轴定位不准的问题。
装旋转变压器的主轴电机,主轴定位速度快,定位精度高。
缺点:低速响应不理想,低速性能稍差;精度不高,分辨率只有1024。
旋转变压器角度位置伺服控制系统S2S1S4S3S2S1S4S3XB变速齿轮上图是一个比较典型的角度位置伺服控制系统框图永磁交流同步伺服电动机速度控制系统框图B A 旋转变压器的结构根据转子电信号引进、引出的方式,分为有刷旋转变压器和无刷旋转变压器。
在有刷旋转变压器中,定、转子上都有绕组。
转子绕组的电信号,通过滑动接触,由转子上的滑环和定子上的电刷引进或引出。
由于有刷结构的存在,使得旋转变压器的可靠性很难得到保证。
因此目前这种结构形式的旋转变压器应用的很少,我们着重于介绍无刷旋转变压器。
目前无刷旋转变压器有三种结构形式。
1)环形变压器式旋转变压器图1示出环形变压器式无刷旋转变压器的结构。
这种结构很好地实现了无刷、无接触。
图中右侧部分是典型的旋转变压器的定、转子,在结构上和有刷旋转变压器一样的定、转子绕组,作信号变换。
左侧是环形变压器。
它的一个绕组在定子上,一个在转子上,同心放置。
1.自整角机的极对数答:自整角机也与旋转变压器一样,也可以做成多级的,也广泛用于双、三通道的同步系统中,工作原理相同。
多级旋变和两级旋变的工作原理相同,不同的是,例如电机有p对级,转子转过360/p度期间,其线圈所匝链的磁通变化情况与两级旋变转过360度是一样的,因此,在这个过程中两者感应电势的变化也完全一样。
在电机中常常定义一对级占360度电角度,所以转子转过360/p机械角度,电角度已经变化360度。
多极旋变与多级自整角机精度比单级的要高,常用做双通道测量系统中的精机。
2.自整角机与旋变的主要指标答:一.自整角机按使用要求不同,分为控制式自整角机和力矩式自整角机。
一般都是成对使用。
控制式自整角机中,又分为控制式发送机(ZKF),控制室差动发送机(用于差角随动系统中,接在控制式发动机与自整角变压器之间,代号ZKC),自整角变压器。
力矩式自整角机分为,力矩式发送机(ZLF),力矩式差动发送机(ZCF),自整角接收机(ZLJ)自整角机的主要技术指标:1.频率,指激磁电源的频率。
常用的是400Hz,也有50Hz。
频率越高,速度误差越小。
2.激磁电压:加在激磁绕组上产生激磁磁通的电压。
(GB/T 13138-2008)3.最大输出电压:指额定激磁时自整角机副边的最大线电压。
对于发送机和接收机均指定子绕组最大线电势,对自整角变压器,则指输出绕组最大电势。
(常见的有9V,12V,16V,36V,90V,110V,115V)4.空载电流和空载功率:指副边空载时,激磁绕组的电流和消耗的功率。
5.开路输入阻抗:指副边开路,从原边(激磁端)看进去的等效阻抗。
(注:自整角变压器是指输出绕组(转子)开路,从定子绕组两端看进去的阻抗)6.短路输出阻抗:指原边(激磁端)短路,从副边绕组两端看进去的阻抗。
7.开路输出阻抗:指原边(激磁端)开路,从副边绕组两端看进去的阻抗。
自整角机的性能指标:1.电气误差:来源:工艺、结构、材料方面的因素使得理论分析条件与实际有差别(详见书P94)测定:用一台精度为零级的自整角发送机,被测自整角机当自整角变压器,放到精密分度盘上,发送机从0度开始每次转过15度,转动分度盘使输出电压最小,理论上每次变压器也转过15度,实际上转过的度数与15度的差值即是每一次的误差值,一共得到24个误差值。
旋转变压器原理及应用上海赢双电机有限公司曲家骐⒈概述⒈⒈旋转变压器的发展旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。
早期的旋转变压器用于计算解答装置中,作为模拟计算机中的主要组成部分之一。
其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。
这些函数是最常见的,也是容易实现的。
在对绕组做专门设计时,也可产生某些特殊函数的电气输出。
但这样的函数只用于特殊的场合,不是通用的。
60年代起,旋转变压器逐渐用于伺服系统,作为角度信号的产生和检测元件。
三线的三相的自整角机,早于四线的两相旋转变压器应用于系统中。
所以作为角度信号传输的旋转变压器,有时被称作四线自整角机。
随着电子技术和数字计算技术的发展,数字式计算机早已代替了模拟式计算机。
所以实际上,旋转变压器目前主要是用于角度位置伺服控制系统中。
由于两相的旋转变压器比自整角机更容易提高精度,所以旋转变压器应用的更广泛。
特别是,在高精度的双通道、双速系统中,广泛应用的多极电气元件,原来采用的是多极自整角机,现在基本上都是采用多极旋转变压器。
旋转变压器是目前国内的专业名称,简称“旋变”。
俄文里称作“ВращающийсяТрансформатор” ,词义就是“旋转变压器”。
英文名字叫“resolver”,根据词义,有人把它称作为“解算器”或“分解器”。
作为角度位置传感元件,常用的有这样几种:光学编码器、磁性编码器和旋转变压器。
由于制作和精度的缘故,磁性编码器没有其他两种普及。
光学编码器的输出信号是脉冲,由于是天然的数字量,数据处理比较方便,因而得到了很好的应用。
早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。
因为旋转变压器具有无可比拟的可靠性,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事以及航天、航空、航海等方面。
随着电子工业的发展,电子元器件集成化程度的提高,元器件的价格大大下降;另外,信号处理技术的进步,旋转变压器的信号处理电路变得简单、可靠,价格也大大下降。