多摩川旋转变压器中文资料
- 格式:pdf
- 大小:3.14 MB
- 文档页数:4
旋转变压器原理及其在自动控制中的应用摘要:介绍旋转变压器(简称旋变)分类、结构特点、工作原理和解码方法,以及在各行各业中的应用,还有与其相关的工业设备(SMARTCAM)的应用特点。
关键词:旋转变压器,SMARTCODER,SMARTCAM旋转变压器简称旋变是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间的函数关系,主要分三大类旋转变压器:1.正--余弦旋转变压器----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2.线性旋转变压器----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种。
3.比例式旋转变压器----其输出电压与转角成比例关系。
结构说明由于我公司只销售日本多摩川公司的正余弦旋转变压器,所以在此介绍的旋转变压器皆为正余弦型的。
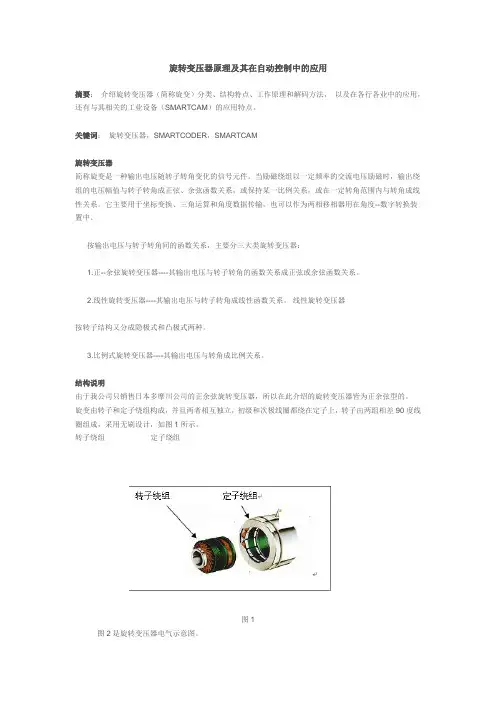
旋变由转子和定子绕组构成,并且两者相互独立,初级和次极线圈都绕在定子上,转子由两组相差90度线圈组成,采用无刷设计,如图1所示。
转子绕组定子绕组图1图2是旋转变压器电气示意图。
ER1-R2励磁电压V eES2-S4图2旋变的输入输出电压之间的具体函数关系如下所示:设转子转动角度为θ,初级线圈电压(即励磁电压): ER1-R2=E*Sin2πftf:励磁频率,E:信号幅度那么输出电压ES1-S3=K*E*Sin2πft*Cosθ; ES2-S4=K*E*Sin2πft*SinθK:传输比,θ:转子偏离原点的角度令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图3所示,图中信号频率为f,即励磁信号频率,最大幅度为E,包络信号为Sinωt和Cosωt,解码器就是通过检测这两组输出信号获取旋变位置信息的。
旋转变压器基础知识旋转变压器是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器:1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。
后者(XDX )称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。
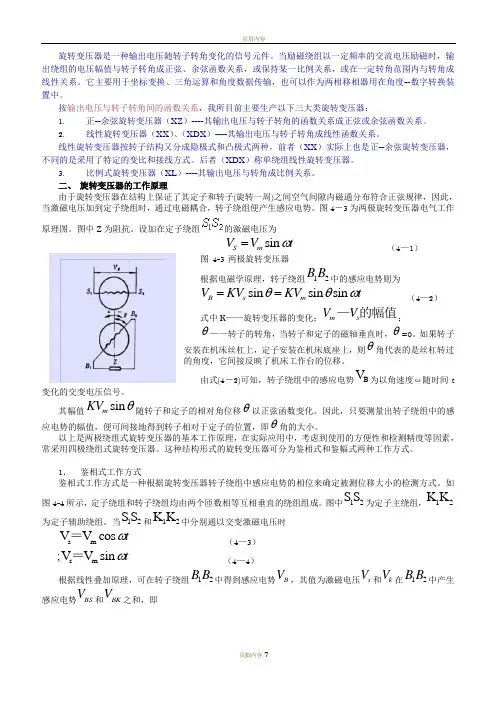
二、旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组的激磁电压为sin ω=- Sm V V t (4—1)图 4-3 两极旋转变压器根据电磁学原理,转子绕组12B B 中的感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器的变化;—的幅值m s V V ;θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过的角度,它间接反映了机床工作台的位移。
由式(4-2)可知,转子绕组中的感应电势B V 为以角速度ω随时间t变化的交变电压信号。
其幅值sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。
基于AU6802N1的旋转变压器信号接口电路的设计和应用摘要:本文在越野电动车交流传动系统中采用旋转变压器实现了异步电机转子位置信号的精确测量,并且设计了基于RDC芯片AU6802N1的旋转变压器位置信号的接口电路。
关键词:位置传感器;旋转变压器;AU6802N1;正交编码脉冲引言旋转变压器是一种模拟型机电元件,为了满足交流传动系统数字化控制的要求,就需要一定的信号接口电路,以实现其模拟信号与控制系统数字信号之间的相互转化,这类接口电路是一类特殊的ADC,也就是所谓的旋转变压器/数字转换器(RDC) 。
日本多摩川公司生产的R/D转换芯片AU6802N1可以方便地将旋转变压器的轴角位移信号(模拟信号)转换为控制系统所需要的数字信号,并具有多种标准信号输出模式,且使用简单、成本低、可靠性高。
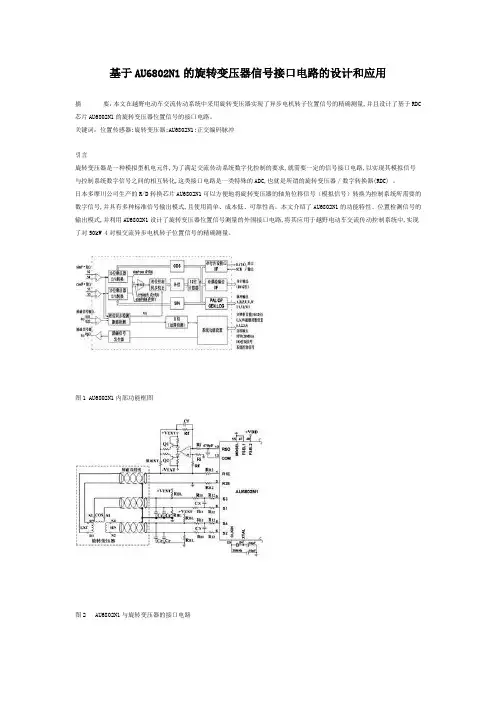
本文介绍了AU6802N1的功能特性、位置检测信号的输出模式,并利用AU6802N1设计了旋转变压器位置信号测量的外围接口电路,将其应用于越野电动车交流传动控制系统中,实现了对50kW 4对极交流异步电机转子位置信号的精确测量。
图1 AU6802N1内部功能框图图2 AU6802N1与旋转变压器的接口电路图3 系统试验框图AU6802N1简介AU6802N1的内部功能如图1所示。
提供给旋转变压器的励磁信号由芯片内部产生并通过RSO口输出,其频率可以设置为10/20kHz。
由旋转变压器输出的转速正弦信号和余弦信号分别通过S2-S4,S1-S3口输入,再经10位乘法器与反馈转速的数字跟踪量相乘,产生的信号再通过比较器和相位补偿及同步校正处理后,得到所需转速的精确数字量。
转速输出模式可通过外部引脚FSEL1和FSEL2设置,转速的数字量以脉冲形式、并行输出形式、并行总线形式、SPI形式来传递给数字信号处理器。
该芯片内部还具有故障自检,信号线断路检测及相位同步检测等功能。
AU6802N1采用TQFP-52封装,大小仅为10.0×10.0×1.0mm3,工作温度范围为-40~125℃。
旋转变压器旋转变压器(resolver/transformer)是一种电磁式传感器,又称同步分解器。
它是一种测量角度用的小型交流电动机,用来测量旋转物体的转轴角位移和角速度,由定子和转子组成。
其中定子绕组作为变压器的原边,接受励磁电压,励磁频率通常用400、3000及5000HZ等。
转子绕组作为变压器的副边,通过电磁耦合得到感应电压。
一、旋转变压器简介旋转变压器的工作原理和普通变压器基本相似,区别在于普通变压器的原边、副边绕组是相对固定的,所以输出电压和输入电压之比是常数,而旋转变压器的原边、副边绕组则随转子的角位移发生相对位置的改变,因而其输出电压的大小随转子角位移而发生变化,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
旋转变压器在同步随动系统及数字随动系统中可用于传递转角或电信号;在解算装置中可作为函数的解算之用,故也称为解算器。
旋转变压器一般有两极绕组和四极绕组两种结构形式。
两极绕组旋转变压器的定子和转子各有一对磁极,四极绕组则各有两对磁极,主要用于高精度的检测系统。
除此之外,还有多极式旋转变压器,用于高精度绝对式检测系统。
旋转变压器的工作原理和普通变压器基本相似,区别在于普通变压器的原边、副边绕组是相对固定的,所以输出电压和输入电压之比是常数,而旋转变压器的原边、副边绕组则随转子的角位移发生相对位置的改变,因而其输出电压的大小随转子角位移而发生变化,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
旋转变压器在同步随动系统及数字随动系统中可用于传递转角或电信号;在解算装置中可作为函数的解算之用,故也称为解算器。
旋转变压器一般有两极绕组和四极绕组两种结构形式。
两极绕组旋转变压器的定子和转子各有一对磁极,四极绕组则各有两对磁极,主要用于高精度的检测系统。
除此之外,还有多极式旋转变压器,用于高精度绝对式检测系统。
旋转变压器是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间的函数关系,我所目前主要生产以下三大类旋转变压器: 1. 正--余弦旋转变压器(XZ )----其输出电压与转子转角的函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX )、(XDX )----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式和凸极式两种,前者(XX )实际上也是正--余弦旋转变压器,不同的是采用了特定的变比和接线方式。
后者(XDX )称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL )----其输出电压与转角成比例关系。
二、 旋转变压器的工作原理由于旋转变压器在结构上保证了其定子和转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组的激磁电压为sin ω=- Sm V V t (4—1)图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中的感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器的变化;—的幅值ms V V ; θ——转子的转角,当转子和定子的磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表的是丝杠转过的角度,它间接反映了机床工作台的位移。
由式(4-2)可知,转子绕组中的感应电势B V 为以角速度ω随时间t变化的交变电压信号。
其幅值sin θm KV 随转子和定子的相对角位移θ以正弦函数变化。
陀螺仪:可应用于航空、航天、航海、兵器、汽车、生物医学、环境监控等领域。
1、体积小、重量轻。
适合于对安装空间和重量要求苛刻的场合,例如弹载测量等。
2、低成本。
3、高可靠性。
内部无转动部件,全固态装置,抗大过载冲击,工作寿命长。
4、低功耗。
5、大量程。
适于高转速大g值的场合。
6、易于数字化、智能化。
可数字输出,温度补偿,零位校正等。
测速发电机:输出电动势与转速成比例的微特电机。
测速发电机的绕组和磁路经精确设计,其输出电动势E和转速n成线性关系,即E=Kn,K是常数。
改变旋转方向时输出电动势的极性即相应改变。
在被测机构与测速发电机同轴联接时,只要检测出输出电动势,就能获得被测机构的转速,故又称速度传感器。
测速发电机广泛用于各种速度或位置控制系统。
在自动控制系统中作为检测速度的元件,以调节电动机转速或通过反馈来提高系统稳定性和精度;在解算装置中可作为微分、积分元件,也可作为加速或延迟信号用或用来测量各种运动机械在摆动或转动以及直线运动时的速度。
电子凸轮:利用角度位置传感器来模拟机械凸轮各控制点的角度范围,并能独立输出各自的控制信号,此种设备称为电子凸轮,包含“机械凸轮+微动开关”的基本功能。
•可以输出多路控制开关量(ON/OFF),且每路都可以独立预设起始、终止角度。
•可以动态检测和显示实际运行角度,对设备运行和再调整实时检测。
•可以随时修改预设角度,且每一路均有LED状态指示,“开态”点亮,“关态”熄灭。
•各路输出信号在电气上相互隔离,抗干扰能力强,可靠性高。
•动作精度可达到1°typical轨迹球:外型尺寸:1、1.4、2、3英寸输出方式:PS2、USB、方波、脉冲输出轨迹球外观:透明(七色光可选)、白色、黑色本产品有发光技术及三轴两项技术专利,产品精度高,寿命长,主要运用于医学行业中的B超、SMP、雷达、舰船等行业,国内市场占有率超过70%。
同步器:同步器有常压式和惯性式。
目前全部同步式变速器上采用的是惯性同步器,它主要由接合套、同步锁环等组成,它的特点是依靠摩擦作用实现同步。
旋转变压器(重点在于输入输出的关系)伺服传感器按被测量分类:位移传感器、速度传感器、加速度传感器、电流传感器。
位移传感器、速度传感器、加速度传感器各有直线和旋转角度的两种方式。
(1)旋转变压器概述⒈⒈旋转变压器的发展旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。
早期的旋转变压器其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。
作为角度位置传感元件,常用的有这样几种:光学编码器、磁性编码器和旋转变压器。
由于制作和精度的缘故,磁性编码器没有其他两种普及。
光学编码器的输出信号是脉冲,由于是天然的数字量,数据处理比较方便,因而得到了很好的应用。
早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。
因为旋转变压器具有无可比拟的可靠性,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事以及航天、航空、航海等方面。
和光学编码器相比,旋转变压器有这样几点明显的优点:①无可比拟的可靠性,非常好的抗恶劣环境条件的能力;②可以运行在更高的转速下。
(在输出12 bit的信号下,允许电动机的转速可达60,000rpm。
而光学编码器,由于光电器件的频响一般在200kHz以下,在12 bit时,速度只能达到3,000rpm);③方便的绝对值信号数据输出。
⒈⒉旋转变压器的应用这些年来,随着工业自动化水平的提高,随着节能减排的要求越来越高,效率高、节能显著的永磁交流电动机的应用,越来越广泛。
而永磁交流电动机的位置传感器,原来是以光学编码器居多,但这些年来,却迅速地被旋转变压器代替。
可以举几个明显的例子,在家电中,不论是冰箱、空调、还是洗衣机,目前都是向变频变速发展,采用的是正弦波控制的永磁交流电动机。
目前各国都在非常重视的电动汽车中,电动汽车中所用的位置、速度传感器都是旋转变压器。
例如,驱动用电动机和发电机的位置传感、电动助力方向盘电机的位置速度传感、燃气阀角度测量、真空室传送器角度位置测量等等,都是采用旋转变压器。
多摩川旋转变压器原理及其解码
姜燕平
【期刊名称】《伺服控制》
【年(卷),期】2007(000)001
【摘要】介绍旋转变压器(简称旋变)分类,结构特点,工作原理和解码方法。
【总页数】2页(P66-67)
【作者】姜燕平
【作者单位】深圳市艾而特工业设备有限公司
【正文语种】中文
【中图分类】TM42
【相关文献】
1.新型旋转变压器及解码器总成的原理与应用 [J], 洪流;江升;
2.旋转变压器解码芯片AD2S1200的解码原理与应用分析 [J], 郭新华;庄兴明;赵峰;方瑞明;卢小芬
3.永磁同步电机旋转变压器解码算法优化设计 [J], 马利娇;贾欣雨;陈少华
4.一种基于AD2S1210的旋转变压器位置解码及监控方法 [J], 李明;安书董;段宇博
5.基于正负序分离的旋转变压器软件解码算法研究 [J], 郭志大;陈磊;周成;陈建明;刘旺
因版权原因,仅展示原文概要,查看原文内容请购买。