真空断路器机械特性的探讨
- 格式:pdf
- 大小:112.55 KB
- 文档页数:4
真空断路器特性分析论文摘要:通过对实际工作经验的总结,论述了永磁机构传动方式、保持力大小以及与真空断路器匹配时确定永磁机构的合、分闸功及动作特性的原理。
关键词:断路器永磁机构特性配合1断路器与机构传动方式配合目前,国内外生产的永磁机构(双稳态)动铁心行程(即动铁心与磁轭之间气隙)都比较小(通常不大于25mm),远小于常规电磁、弹簧、液压和空压操动机构的行程。
因此,目前它还只能配用在触头行程较小的中压真空断路器上。
如果单从满足断路器行程方面要求,可以通过放大传动机构的输出行程,满足大行程断路器要求。
但是,目前国内外生产的永磁机构的分、合闸力也较小,通常在2000~4000N,最大也不大于6000N。
在将它与断路器配用中,往往只能利用传动机构的行程缩小、作用力放大,而不能利用行程放大、作用力缩小的功能。
12kV真空灭弧室的触头开距一般约为10mm,当触头弹簧直接设在动触杆上,超程约3mm时,真空灭弧室要求行程(触头开距加超程)为13mm左右。
如果选用行程为25mm的永磁机构,就需设计中间传动机构使行程匹配,而且在设计传动比时必须考虑行程损失因素。
40.5kV真空灭弧室触头要求行程约25mm(开距约20mm,超程约4.5mm),正好与行程为25mm的永磁机构相匹配,可采用操动机构与真空灭弧室动触杆同轴连接的传动方式。
这样不仅可以减少行程损失,而且有利于抑制合闸弹跳。
2永磁机构分、合闸状态保持力的选择永磁机构结构简单,动作可靠性高,无需合分闸位置机械保持和脱机装置,它是由永久磁铁产生的吸力使断路器保持在分、合闸位置[1]。
真空断路器要求一定的触头接触压力,因此,永磁机构的吸力不仅要能克服触头弹簧的反作用力和其他反力,而且还必须具有足够的合闸位置有效保持力,防止受到外界可能因素作用下(机械震动、电动力等)出现自动误分闸。
该保持力的大小不仅决定了断路器合闸保持性能,而且还决定了分闸功及分闸速度等重要参数。
根据试验得出合闸有效保持力:当开断电流为20kA及以下者,宜选择在500~700N;开断电流为31.5kA及以上者,宜选择在700~1000N。
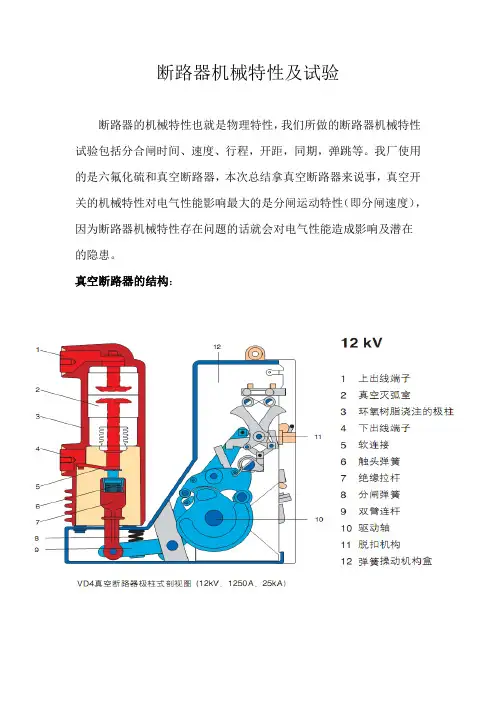
断路器机械特性及试验断路器的机械特性也就是物理特性,我们所做的断路器机械特性试验包括分合闸时间、速度、行程,开距,同期,弹跳等。
我厂使用的是六氟化硫和真空断路器,本次总结拿真空断路器来说事,真空开关的机械特性对电气性能影响最大的是分闸运动特性(即分闸速度),因为断路器机械特性存在问题的话就会对电气性能造成影响及潜在的隐患。
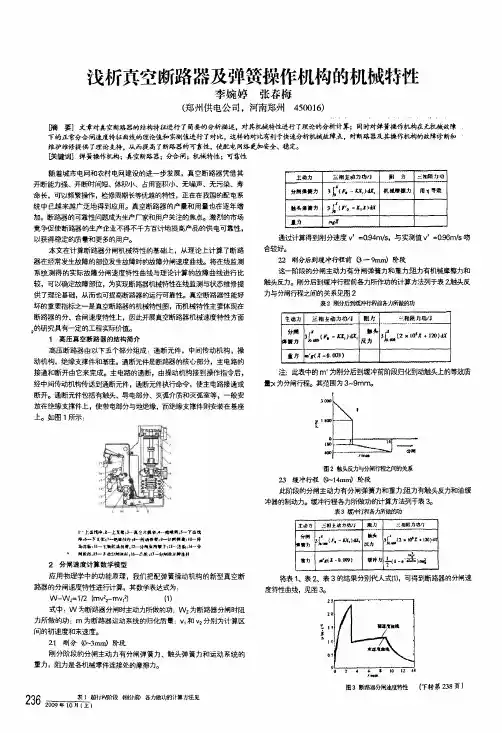
真空断路器的结构:断路器的操动机构:合闸过程:当手按下机构外壳的合闸按钮或启动合闸线圈Y3合闸过程便开始,于是脱扣机构12释放由预先已储能的盘簧带动主轴10,凸轮11和主轴10一起转动,绝缘连杆6由移动连杆8和凸轮带动,然后在每一相真空断路器的灭弧室2内的动触头16由绝缘连杆6带动向上运动,直至触头接触好为止,同时触头压力弹簧5被压紧,以保证主触头由适当的压力,在合闸过程中分闸弹簧7也同时被压紧。
分闸过程:当手按下机构外壳的分闸按钮或启动分闸线圈Y2分闸过程便开始,于是脱扣机构12释放仍有足够储能的盘簧带动主轴10进一步转动,由凸轮11和移动连杆8去释放分闸弹簧,于是动触头16和绝缘连杆6一起以一定的速度向下运动,至分闸位置,同时触头压力弹簧5被压紧,以保证主触头由适当的压力,在合闸过程中分闸弹簧7也同时被压紧。
1.三相不同期:指开关三相分(合)闸时间的最大及最小值的差值。
2.弹跳时间:指开关的动静触头在合闸过程中发生的所有接触,分离(即弹跳)的累计时间值(即第一次接触到完全接触的时间)。
3.分闸时间:处于合闸位置的断路器,从分闸脱扣带电时刻到所有各极触头分离时刻的时间间隔。
4.合闸时间:处于分闸位置的断路器,从合闸回路带电时刻到所有极的触头都接触时刻的时间间隔。
5.开距:指开关从分状态开始到动触头与静触头刚接触的这一段距离。
真空断路器的主要作用:是控制和保护作用,根据系统运行的需要将部分或全部的的电气设备或线路投入或退出;当电力系统某一部分发生故障时,它和保护装置(综保)相配合,将该故障部分从系统中迅速切除,减少停电范围,防止事故扩大,保护系统中各类电气设备不受损坏,保证系统无故障部分安全运行。

第27卷㊀第3期2023年3月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electric㊀Machines㊀and㊀Control㊀Vol 27No 3Mar.2023㊀㊀㊀㊀㊀㊀考虑电动斥力的真空断路器刚柔耦合系统机械特性研究董华军1ꎬ2ꎬ㊀孙鹏1ꎬ2ꎬ㊀李东恒1ꎬ㊀陈培军1ꎬ2ꎬ㊀郭方准1(1.大连交通大学机械工程学院ꎬ辽宁大连116028ꎻ2.平高集团有限公司ꎬ河南平顶山467001)摘㊀要:针对真空断路器分闸过程涉及到的灭弧室侧电磁力与操动机构侧机械运动的耦合计算问题ꎬ结合Mayr ̄Cassie混合式电弧模型㊁灭弧室电磁场模型以及操动机构刚柔耦合动力学模型提出一种断路器分断过程电-磁-机械动态特性耦合计算方法ꎮ基于真空断路器分断过程动态特性计算结果ꎬ通过显式动力学方法对分闸过程中触头弹簧系统的冲击碰撞现象进行模拟计算ꎬ并结合应变寿命理论及Miner累计损伤理论计算触头弹簧结构的工作寿命ꎬ在此基础上对触头弹簧结构进行优化改进工作ꎮ研究结果表明:在断路器分闸过程中电动力方向并不总是为触头斥开方向ꎬ在超程阶段结束之前动触头承受的电动力为斥开方向ꎬ在超程结束后动触头承受电动力为闭合方向ꎻ在承受分闸冲击时ꎬ优化前的触头弹簧结构应力危险范围在弹簧销与导向套的接触界面处ꎬ应力数值为273.28MPaꎬ其疲劳寿命为2027次ꎬ优化后的触头弹簧结构疲劳寿命为12030次ꎬ满足断路器产品额定机械寿命的要求ꎮ关键词:电动斥力ꎻ电弧模型ꎻVS1真空断路器ꎻ分闸特性ꎻ触头弹簧ꎻ疲劳寿命DOI:10.15938/j.emc.2023.03.014中图分类号:TM561文献标志码:A文章编号:1007-449X(2023)03-0147-11㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2021-12-03基金项目:国家自然科学基金(51477023)ꎻ辽宁省自然科学基金计划项目(2019-MS-036)作者简介:董华军(1978 )ꎬ男ꎬ博士ꎬ教授ꎬ博士生导师ꎬ研究方向为真空开关电弧基础理论㊁图像处理及识别ꎻ孙㊀鹏(1977 )ꎬ男ꎬ博士研究生ꎬ研究方向为真空开关电弧基础理论ꎻ李东恒(1996 )ꎬ男ꎬ博士研究生ꎬ研究方向为真空开关电弧基础理论ꎻ陈培军(1977 )ꎬ女ꎬ博士研究生ꎬ研究方向为真空开关电弧基础理论ꎻ郭方准(1970 )ꎬ男ꎬ博士ꎬ教授ꎬ博士生导师ꎬ研究方向为超高真空科研装备的研发ꎮ通信作者:董华军Researchonstructuralcharacteristicsofrigid ̄flexiblecouplingsystemofVCBconsideringelectro ̄dynamicrepulsionforceDONGHua ̄jun1ꎬ2ꎬ㊀SUNPeng1ꎬ2ꎬ㊀LIDong ̄heng1ꎬ㊀CHENPei ̄jun1ꎬ2ꎬ㊀GUOFang ̄zhun1(1.SchoolofMechanicalEngineeringꎬDalianJiaotongUniversityꎬDalian116028Chinaꎻ2.PinggaoGroupCo.ꎬLtd.ꎬPingdingshan467001ꎬChina)Abstract:Aimingatthecouplingproblemofelectromagneticforceonvacuuminterrupterandmechanicalmotiononoperatingmechanismꎬacouplingcalculationmethodofelectro ̄magnetic ̄mechanicaldynamiccharacteristicsofcircuitbreakerwasproposedbasedonMayr ̄Cassiearcmodelꎬelectromagneticmodelofinterrupteranddynamicmodelofoperatingmechanism.Thecollisionphenomenonofcontactspringdur ̄ingopeningprocesswascalculatedbyexplicitdynamicmethod.Thefatiguelifeofcontactspringwascal ̄culatedꎬandthestructureofcontactspringwasoptimized.Fromtheresultwecansee:theelectrodynam ̄icforceofthemovingcontactisintherepulsiondirectionintheover ̄rangestageꎬandtheelectrodynamicforceofthemovingcontactisinthecloseddirectionaftertheover ̄rangestage.Thehighstressofthecon ̄tactspringisatthecontactinterfacebetweenthespringpinandtheguidesleeveꎬwherethestressis273.28MPaꎬthefatiguelifeis2027timesbeforeoptimization.Thefatiguelifeofthecontactspringstructureis12030timesafteroptimizationꎬwhichmeetstherequirementofmechanicallife.Keywords:electrodynamicrepulsionforceꎻarcmodelꎻVS1vacuumcircuitbreakerꎻopeningcharacteris ̄ticsꎻcontactspringꎻfatiguelife0㊀引㊀言真空断路器作为控制和保护设备广泛应用于中压配电系统中ꎬ当真空断路器分闸时ꎬ分闸弹簧作为动力支持驱动绝缘拉杆向下运动ꎬ直至触头到达分闸位置经缓冲装置作用而停止运动ꎮ此期间操动机构作为真空断路器的驱动单元ꎬ其动态特性对断路器的开断能力有着决定性影响[1-3]ꎮ但是真空断路器的分闸过程并不是一个简单的机械动力学问题ꎬ当断路器分断电流较大时ꎬ若操动机构提供的动力输出与灭弧室灭弧特性的匹配性较差ꎬ灭弧室触头间产生的温度极高的真空电弧将难以熄灭ꎬ导致触头㊁动导杆等导电部件在分断电流及其产生的磁场作用下产生电动力ꎬ而触头等部件产生的电动力又反过来会对机构分闸运动造成影响ꎮ因此真空断路器的分闸过程本质上是一个灭弧室侧电磁场与操动机构侧机械运动的多领域耦合问题ꎮ此外当机构分闸速度过大时ꎬ部分零件极有可能在循环冲击载荷下产生疲劳破坏ꎬ进而影响到断路器的工作稳定性ꎮ因此对断路器系统在分断大电流时的电-磁-机械特性进行研究ꎬ有着十分重要的意义ꎮ断路器开断过程主要涉及到电流ꎬ磁场ꎬ电动力及机械运动的多方向耦合问题ꎮ目前大多学者采用ADAMS刚体动力学仿真分析方法来计算断路器空载条件下的分闸运动特性ꎬ该方法可较为方便地计算出触头㊁拉杆等运动部件的速度㊁位置等信息ꎬ但关于操动机构部件在分闸工作过程中承受冲击载荷时的应力变化及其易发生失效破坏的位置等信息却无法得到ꎮ后来王建华等人在此基础上采用显示动力学仿真分析方法来处理操动机构合分闸过程中部件的冲击碰撞问题ꎬ并利用LS ̄DYNA以及Ncode软件耦合对真空断路器动静铁心以及合闸保持机构等部件在合分闸冲击过程中的应力应变及疲劳寿命进行了计算[4]ꎬ对本文断路器机构刚柔耦合动力学模型的建立以及疲劳寿命计算有着很好的借鉴意义ꎮ但以上学者在对断路器合分闸过程进行研究时ꎬ较少考虑触头电动斥力对机构运动特性产生的影响ꎮ陈德桂㊁李兴文等[5-7]人针对触头系统电动斥力进行了试验研究ꎬ然后在此基础上引入圆柱导电桥模型利用有限元仿真方法对触头电动斥力进行了计算ꎮ这种有限元电磁耦合仿真方法也是目前触头电动斥力计算所采用的主流方法ꎬ但目前研究对象多为直流继电器㊁塑壳断路器等开关电器的触头系统的电动斥力ꎬ关于结构更为复杂的真空灭弧室触头系统电动斥力的研究却相对较少ꎻ此外大多学者研究较多的是触头闭合情况下的电动斥力ꎬ较少将电动斥力与机构的运动过程联系起来进行耦合计算ꎮ后来纽春萍㊁荣命哲㊁李兴文等[8-10]人采用ADAMS二次开发方法ꎬ将电动斥力以静态数据网格的形式ꎬ通过用户子程序加载到断路器机构运动模型上ꎬ实现了断路器分断过程电路方程㊁电磁场以及机构运动方程的耦合求解ꎬ但是该方法理论性较强ꎬ且对开发人员的编程水平要求相对较高ꎬ难以被大多技术人员所掌握ꎬ因此在以上学者研究基础上开发出一种更为简洁的断路器分闸过程电-磁-机械运动特性耦合计算方法就显得尤为重要ꎮ基于此ꎬ本文首先对12kV真空灭弧室导电部分的电流密度㊁磁场进行仿真计算ꎬ在此基础上分析了不同开距和电流下导电回路洛伦兹力的变化及触头闭合时电流对霍尔姆力的影响ꎮ然后建立Mayr ̄Cassie混合式电弧模型ꎬ对灭弧室短路开断过程中电流动态过程进行仿真计算ꎻ建立VS1型真空断路器操动机构刚柔耦合动力学仿真模型ꎬ通过MAT ̄LAB编程技术将电动斥力施加到断路器机构动力学计算模型上ꎬ实现断路器机构载流条件下分断过程电-磁-机械动态特性耦合计算ꎻ最后利用显示动力学方法计算触头弹簧结构在承受分闸冲击时的应力㊁应变情况ꎬ并将动态计算结果与Ncode软件耦合ꎬ计算出触头弹簧结构的分闸操作寿命及寿命危险区域ꎬ为触头弹簧结构的优化设计工作提供理论参考ꎮ1㊀触头结构电动力计算1.1㊀触头洛伦兹力计算触头在断开时刻计算洛伦兹力时需要在动静触头间建立电弧模型ꎬ这里选取电弧产生的主要区域841电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀将其视为一圆柱体导体[11-13]ꎮ真空电弧电导率设置为2.8ˑ103S/mꎬ相对磁导率为1ꎬ其直径与触头外径一致ꎬ为78mmꎬ厚度为灭弧室开距10mmꎮ加载电流的方向是由静触头流向动触头ꎬ大小为40kAꎬ此时触头导电回路电流密度㊁磁场分布以及电动力分布计算结果分别如图1㊁图2㊁图3所示ꎮ图1㊀电流密度分布Fig.1㊀Distributionofcurrentdensity图2㊀磁场分布Fig.2㊀Distributionofmagneticfield在图1(a)中ꎬ电流在杯壁触指处分布较为密集ꎬ在电弧和触头片处电流密度较小ꎻ动静触头杯座上电流流向基本一致ꎬ因此在表1电动斥力计算结果中ꎬ杯座之间的洛伦兹力为互相吸引的力ꎻ而图1(b)中动静触头片上电流流向则相反ꎬ导致触头片之间的洛伦兹力为互相排斥的力ꎮ图3㊀电动力分布Fig.3㊀Distributionofelectrodynamicforce在图2中ꎬ总体上来说触头杯指处磁场较大ꎬ导杆处磁场较小ꎻ在电弧中心平面上ꎬ触头产生的纵向磁场沿触头半径方向分布较为均匀ꎬ呈现出先略微升高后迅速下降的趋势ꎬ电弧中心平面上磁场最大的环形区域对应着触头片上开槽末端位置ꎮ表1㊀触头结构洛伦兹力计算结果Table1㊀CalculationresultsofLorentzforce零件洛伦兹力/N触头片-33.526杯座㊀273.23支撑盘-0.032合力㊀239.672当触头断开时ꎬ触头杯座开槽处也即是触指处洛伦兹力密度最大ꎬ由于杯座互相吸引的力要大于触头片互相排斥的力ꎬ因此动触头产生的洛伦兹力方向为触头合闸方向ꎮ利用参数化仿真可分析开距和电流对触头洛伦兹力的影响ꎬ改变电流与开距时触头结构洛伦兹力变化如图4所示ꎮ图4㊀触头洛伦兹力与开距和电流的关系Fig.4㊀RelationshipbetweenLorentzforceanddistanceandcurrent941第3期董华军等:考虑电动斥力的真空断路器刚柔耦合系统机械特性研究在相同电流条件下ꎬ触头结构洛伦兹力随着触头间开距的增加而减小ꎬ在2mm处有明显拐点ꎮ在0~2mm范围内洛伦兹力随开距减小的趋势较大ꎬ2mm后曲线变化幅度较小ꎮ通过以上建立的洛伦兹力数据网格ꎬ灭弧室触头在任意时刻所对应的电流㊁触头开距下的洛伦兹力均可在MATLAB中通过二元插值功能来计算ꎮ1.2㊀触头霍尔姆力计算当动静触头闭合时ꎬ仅有少数的导电斑点相接触ꎬ这就导致触头流过电流时ꎬ电流会在动㊁静触头的接触斑点处发生收缩ꎬ触头间会产生互相排斥的霍尔姆力[14]ꎮ假设全部导电斑点集中在触头中心ꎬ此时触头实际受力情况需要同时考虑触头预压力㊁洛伦兹力和霍尔姆力3个力ꎬ触头间在垂直接触面的方向上霍尔姆力可通过经验计算公式得到ꎬ即FH=μ04πI2lnRr=μ04πI2lnξHπR2FK+FH+FLꎮ(1)式中:I为流经收缩区导体的电流ꎬAꎻR为动触头的截面半径ꎻμ0为真空磁导率ꎻξ为与触头表面接触状况有关的系数ꎬ其范围在0.3~1之间ꎻH为材料的布氏硬度ꎬN/mm2ꎻFK为触头间接触力ꎬNꎻFH为霍尔姆力ꎬNꎻFL为洛伦兹力ꎬNꎻ其中以触头合闸压力方向为正方向ꎮ式(1)为隐性公式ꎬ触头接触力可在后续计算中利用动力学模块求解ꎮ2㊀灭弧室开断过程电弧模型研究2.1㊀Mayr ̄Cassie混合式电弧模型当灭弧室开断短路电流时ꎬ触头间会有短暂的燃弧现象ꎮ目前常用的电弧黑盒模型通常有Mayr模型㊁Cassie模型和Ayrton模型等ꎬ由于各种电弧模型对电弧本身性质的不同设定ꎬ所以各种电弧模型具有不同的适应范围ꎮMayr在电弧电流较小ꎬ电弧电阻较大时对电弧特性的描述较为准确ꎬ而Cassie则更适用于电弧电流大ꎬ电弧电阻小的情况ꎮ为实现在短路电流开断过程中ꎬ电流大小不同时能切换Mayr和Cassie模型ꎬ在相关研究文献中ꎬ有部分学者在Mayr电弧模型基础上ꎬ引入连接函数利用组合形式建立Mayr ̄Cassie混合式电弧模型[15-18]ꎬ可对不同范围电流下的电弧模型进行准确描述ꎬ对电弧模型建立工作有着很好的借鉴意义ꎮMayr电弧模型可描述为1g(t)dg(t)dt=dln(g)dt=1τu(t)i(t)Ploss-1()ꎮ(2)式中:g(t)为电弧电导ꎻi(t)㊁u(t)分别为电弧的电流和电压ꎻτ为电弧时间常数ꎻPloss为电弧耗散功率ꎬ与电弧直径㊁径向运动速度以及电流有关ꎬW/mꎮCassie电弧模型可描述为1g(t)dg(t)dt=dln(g)dt=1τu2(t)u2c-1()ꎮ(3)式中uc为电弧电压常数ꎮgarc=1-exp-i2I20()[]gc+exp-i2I20()gm=1-exp-i2I20()[]uiu2c-τdg(t)dt()+exp-i2I20()i2(t)Ploss(t)-τdg(t)dt()ꎮ(4)式中:garc为总电弧电导ꎻgm㊁gc为Mayr和Cassie电弧电导ꎻi为实际电弧电流ꎻI0为过渡电流ꎬ一般在5~7A范围内ꎮ当电弧电流较小时ꎬMayr电弧模型电导在总电导中所占比例系数较大ꎬ故Mayr电弧模型在总电弧模型中起主要作用ꎻ而当电弧电流较大时ꎬCassie电弧模型在总电弧模型中起主要作用[19]ꎮ基于此ꎬ本文在Simulink中搭建了Mayr ̄Cassie混合式电弧模型及外载电路ꎬ对12kV真空灭弧室短路开断过程中电流动态过程进行仿真计算ꎮ2.2㊀电弧仿真结果分析施加的三相电源频率为50Hzꎬ其中以A相电流过零时刻0.02s为开断时刻ꎮ电弧模型主要参数:初始电导为1ˑ104ꎻPloss为1.5ˑ106W/mꎻτ为0.1msꎻI0为5Aꎻuc为20Vꎮ灭弧室开断过程电流仿真结果如图5所示ꎮ图5㊀混合式电弧开断仿真结果Fig.5㊀Resultofhybridarcbreaking051电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀在0.02s时刻ꎬ动静触头分离ꎬ触头间将产生真空电弧ꎮ由于电路断开时刻A相中电流为0ꎬ故A相中虽然也会产生真空电弧ꎬ但电弧燃烧阶段的电流数值相对小ꎻB㊁C两相在断开时刻的电流数值较大ꎬ故在真空电弧燃烧阶段内ꎬ两相电弧电流并不会立刻减少至0ꎬ而是呈现逐渐减小的趋势ꎮ而在各相主电路电流过零瞬间ꎬ触头产生的金属蒸汽将不足以维持真空电弧的燃烧ꎬ各相的电弧也将熄灭ꎮ3㊀操动机构合闸过程动力学分析3.1㊀操动机构刚柔耦合动力学模型建立断路器刚柔耦合动力学模型建立过程可分为4部分:首先利用ADAMS建立VS1型操动机构动力学模型ꎬ如图6所示ꎮ图6㊀VS1操动机构动力学仿真模型Fig.6㊀DynamicsmodelofVS1operatingmechanism然后根据各部件之间实际接触情况建立接触副和碰撞关系ꎻ其次利用有限元软件ANSYS对关键零件进行模态分析ꎬ建立关键零部件模态分析文件ꎻ最后在ADAMS中读入模态文件ꎬ并对断路器系统中刚性零部件进行替换ꎮ所建的操动机构刚柔耦合动力学模型中ꎬ缓冲部分实际情况下多采用油缓冲器ꎬ因其阻尼参数难以获取ꎬ故将其简化为阻尼弹簧ꎬ通过合理调整其刚度和阻尼可以达到与油缓冲器类似的缓冲效果ꎮ3.2㊀考虑电动斥力的断路器分闸过程计算将刚柔耦合动力学模型导入到Simulink环境中ꎬ通过编写MATLABFunction的形式计算分闸过程中触头电动斥力:1)由MATLAB拟合图5中三相电流波形公式ꎬ并用该公式计算该时刻t对应的电流值ꎬ同时由动力学模块返回该时刻对应的触头位移以及触头接触压力ꎮ2)已知该时刻电流以及触头接触压力情况下ꎬ可由经验公式(1)计算触头霍尔姆力ꎮ3)在已知该时刻电流和触头位移的条件下ꎬ采用二元插值方法在建立的洛伦兹力数据网格中查取对应电流以及触头开距下的触头洛仑兹力ꎮ4)将计算的霍尔姆力和洛仑兹力的合力作为总电动力通过接口函数返还到动力学模型中ꎬ其中霍尔姆力仅存在于触头接触行程阶段ꎬ即超行程阶段ꎬ而洛伦兹力存在于超行程结束后的分闸阶段ꎮ5)动力学模块接收到t时刻的电动力后ꎬ进行机构动力学仿真ꎬ同时输出t+1时刻的触头位移及触头接触压力ꎬ用于下一个时间步内电动力的计算[20-21]ꎮ通过以上步骤的不断迭代计算ꎬ可将机械运动方程和电路㊁电磁场方程耦合求解ꎬ从而实现断路器的包含机构碰撞弹跳信息在内的整个分闸过程动态特性的计算ꎮ图7为机-电-磁耦合计算模块ꎮ图7㊀机-电-磁耦合计算模块Fig.7㊀Couplingcalculationmoduleofstructural ̄electricity ̄magnetic151第3期董华军等:考虑电动斥力的真空断路器刚柔耦合系统机械特性研究3.3㊀动力学仿真结果设置仿真初始条件为触头弹簧终压力为4500Nꎬ刚度为400N/mmꎬ分闸弹簧预拉力200Nꎬ刚度50N/mmꎬ触头额定开距为10mmꎬ接触行程为3mmꎻ同时灭弧室触头自闭力简化为拉开一定距离的阻尼弹簧ꎬ刚度为10N/mmꎬ预拉力为200N[22]ꎮ以分闸时刻为A相的电流过零点时刻ꎬ仿真得到操动机构分闸过程各部件运动状态以及触头分闸速度与位移曲线如图8㊁图9所示ꎮ图8㊀分闸过程操动机构各部分运动状态Fig.8㊀Motionstateofoperatingmechanismduringopeningprocess图9(a)中ꎬ在t=0时ꎬ机构处于分闸启动阶段ꎬ此时断路器处于合闸位置ꎬ绝缘拉杆在传动拐臂的动力传递下由分闸弹簧驱动着向下运动ꎬ但动触头在触头弹簧的作用下与静触头紧紧闭合在一起ꎮ在t=2.5ms时ꎬ超程阶段结束ꎬ动触头在绝缘拉杆的带动下开始向下运动ꎮ从图9(b)中可看出此阶段动触头与拉杆的运动速度保持一致ꎬ二者的运动曲线几乎完全平行ꎮ在t=10ms时ꎬ机构到达分闸位置ꎬ在缓冲器的作用下ꎬ动触头及拉杆经过一段时间的震荡后于t=30ms时趋于稳定ꎮ在文献[23-26]中ꎬ有学者针对弹簧操动机构进行了分闸特性实验研究ꎬ测得灭弧室触头部件的分闸速度基本上呈现出先迅速增大然后在缓冲器作用下减小至0的变化趋势ꎬ这与文中动触头分闸速度仿真结果的变化趋势基本一致ꎻ只是文中缓冲器与相关文献中缓冲器的类型不同ꎬ并且进行了一定简化处理ꎬ故在分闸末期阶段动触头反向回弹的高度以及机构达到稳定状态所需的时间有所差别ꎮ图9㊀操动机构动力学计算结果Fig.9㊀Dynamiccalculationresultsofoperatingmechanism分闸期间触头电动力变化如图10所示ꎮ图10㊀动触头分闸过程电动力随时间变化Fig.10㊀Electricpowerofmovingcontactschangeswithtimeduringtheopeningprocess在触头超程阶段ꎬ动静触头尚未分离ꎻ此时由图5可知:A㊁C两相电路中电流数值在减小ꎬ因此251电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图10中超程阶段A㊁C两相中的电动力也呈现减小趋势ꎻB相电路在超程阶段的电流数值不断增大ꎬ因此其电动力也呈上升趋势ꎮ但在超程阶段各相电路中触头电动力均为触头斥开方向ꎮ在动静触头分离瞬间ꎬ触头片上霍尔姆力迅速减小至0ꎬ触头总体电动力方向发生变化ꎬ此时触头电动力为杯座上的洛伦兹力ꎬ方向为触头闭合方向ꎮ最后随着动静触头间距离增大以及电流的减小ꎬ触头电动力减小至0ꎮ4㊀触头弹簧结构疲劳寿命计算在分闸阶段ꎬ导向套在触头弹簧反力作用下首先向下移动ꎬ动导杆侧则在触头弹簧压力作用下保持静止ꎻ在超行程阶段结束时ꎬ导向套开槽上端部分与弹簧销接触ꎬ弹簧销以及动导杆部分在拉杆驱动下开始向下运动ꎮ此期间触头弹簧销与导向套会产生冲击碰撞现象ꎬ对触头弹簧系统的机械寿命有着不利的影响ꎮ典型的触头弹簧结构如图11所示ꎮ图11㊀触头弹簧系统模型Fig.11㊀Modelofcontactspringsystem本文建立了两种结构弹簧销模型ꎬ第一种在动导杆两侧开有4mm深的圆孔槽ꎬ弹簧销为两端小圆柱ꎬ插入动导杆孔内与之配合ꎻ第二种在动导杆处开一通孔ꎬ弹簧销插入孔内与动导杆配合[27]ꎮ利用显示动力学软件LSDYNA可对两种弹簧销结构在分闸过程中的冲击碰撞现象进行模拟ꎮ仿真中ꎬ触头弹簧刚度为400N/mmꎬ终压力为4500Nꎻ接触行程为3mmꎻ速度初始条件为0ꎻ动导杆材料为无氧铜ꎬ轴套为不锈钢ꎬ弹簧销为Ni ̄Cr ̄Mo铁ꎬ各材料属性如表2所示ꎮ表2㊀材料参数Table2㊀Parametersofmaterials参数Ni ̄Cr ̄Mo不锈钢无氧铜密度/(kg/m3)850077508940弹性模量/Pa2.07ˑ10111.93ˑ10111.1ˑ1011泊松比0.320.310.34屈服应力/Pa6.3ˑ1082.07ˑ1081.96ˑ108㊀㊀两种触头弹簧结构分闸过程中Von ̄Mises应力最大时的分布情况如图12所示ꎮ图12㊀弹簧销应力分布Fig.12㊀Stressdistributionofspringpin在两种结构弹簧销中ꎬ第一种弹簧销结构整体应力数值较大ꎬ在弹簧销与动导杆接触的端部位置产生了应力集中现象ꎮ第二种弹簧销结构最大应力数值较小ꎬ应力分布也相对均匀ꎬ弹簧销的应力集中范围出现在圆柱体中间部分ꎮ第二种弹簧销结构在分闸过程种应力变化如图13所示ꎮ图13(a)为合闸保持阶段ꎬ为保证动静触头间具有一定的接触压力ꎬ故拉杆及导向套部件需要给与弹簧销一定向上的压力ꎬ此时弹簧销与动导杆靠上部分接触区域应力较大ꎮ图13(b)阶段为超行程阶段ꎬ动导杆及弹簧销保持静止ꎬ导向套在拉杆及触头弹簧作用下向下运动ꎬ此阶段整体应力数值较小ꎮ图13(c)时刻弹簧销与导向套开槽上端部分刚接触ꎬ在接触区域应力数值开始增大ꎮ图13(d)时刻为弹簧销应力最大时刻ꎬ在导向套㊁动导杆与弹簧销的接触界面尺寸改变处形成应力集中区域ꎬ并且此刻可观察到弹簧销体产生了局部微小变形ꎮ图13(e)㊁图13(f)时刻ꎬ弹簧销变形已恢复ꎬ此时整体应力数值较小ꎬ无明显应力集中区域ꎻ弹簧销㊁动导杆与导向套三者之间保持相对静止状态ꎬ在拉杆驱动下继续完成分闸操作ꎮ351第3期董华军等:考虑电动斥力的真空断路器刚柔耦合系统机械特性研究图13㊀开断过程弹簧销应力随时间变化Fig.13㊀Stressofspringpinchangeswithtimeduringbreaking在t=3.1ms时导向套㊁动导杆与弹簧销三者之间的冲击碰撞现象较为严重ꎬ此时弹簧销结构应力值最大约为273MPaꎮ弹簧销结构现多采用Ni ̄Cr ̄Mo铁材料ꎬ故弹簧销在分闸过程中应力已经接近其材料屈服极限ꎬ极易产生塑性变形[28]ꎮ因此为判断触头弹簧结构的机械性能是否符合设计要求ꎬ需要对触头弹簧系统整体的疲劳寿命进行计算ꎮ本文采用Ncode软件对弹簧销结构的寿命进行计算ꎮ其中在分闸过程中由于弹簧销的应力数值较大ꎬ且正常工作情况下断路器一般不会频繁开断ꎬ因此触头弹簧结构的疲劳寿命计算属于低周疲劳的范畴ꎬ在软件中需采用应变疲劳寿命求解器来计算ꎮ将LS ̄DYNA计算的应力㊁应变结果导入到Ncode软件中ꎬ基于局部应变寿命理论以及Miner线性疲劳累积损伤理论即可计算弹簧销结构的分闸操作寿命及寿命危险区域ꎬ如图14所示ꎮ触头弹簧结构疲劳寿命较低区域主要分布在弹簧销与导向套接触界面处ꎬ该区域对应的疲劳寿命约为2027次ꎻ其中弹簧销结构的寿命危险区域在销体中间区域ꎬ与图13中弹簧销的应力分布对比可知ꎬ弹簧销中间区域应力数值较大ꎬ分布较为集中ꎬ因此最容易产生疲劳破坏ꎮ导向套的寿命危险区域在其开槽的上端部ꎬ在分闸过程中ꎬ此处将与弹簧销直接产生接触碰撞ꎬ故寿命计算结果相对其他区域较低ꎮ动导杆结构的寿命危险区域主要分布在与弹簧销相配合的通孔处ꎬ弹簧销承受的冲击载荷将通过销与孔的接触界面传递到动导杆处ꎬ因此在动导杆上由通孔处向周围区域处寿命计算结果呈现由低到高的变化趋势ꎮ总体上来说ꎬ低寿命基本出现在高应力区域ꎬ这些区域基本可视为在分闸时触头弹簧结构易产生裂纹的区域ꎮ此外断路器产品的机械额定寿命为10000次ꎬ以上触头弹簧结构的寿命计算结果与之相差较大ꎬ故对于本文所建立的真空断路器模型而言ꎬ该触头弹簧结构的设计并不合理ꎮ图14㊀触头弹簧系统寿命计算结果Fig.14㊀Fatiguelifeofthecontactspringsystem上述结构疲劳寿命较低的因素主要为在弹簧销与导向套碰撞时ꎬ二者接触面积过小ꎬ使得产生的应力在接触界面处高度集中ꎬ导致触头弹簧结构极易发生破坏ꎮ因此本文对以上触头弹簧结构做出了改进ꎬ如图15所示ꎮ图15㊀改进后触头弹簧结构Fig.15㊀Improvedmodelofcontactspringsystem由于改进后的触头弹簧结构在分闸碰撞时导向套与拉杆间接触界面的面积较大ꎬ因此可有效减弱应力集中现象ꎮ当仿真条件设置与第一种触头弹簧结构完全一致时ꎬ该结构在分闸冲击下的寿命计算结果如图16所示ꎮ451电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图16㊀改进后触头弹簧系统寿命计算结果Fig.16㊀Fatiguelifeoftheimprovedcontactspringsystem从寿命计算结果来看ꎬ触头弹簧结构改变之后ꎬ机械寿命得到了较大增长ꎻ其寿命较低区域主要分布在动导杆与拉杆的直径变化处ꎬ该区域对应的最低疲劳寿命约为12030次ꎮ与断路器产品额定机械寿命相比ꎬ优化后的触头弹簧结构超出了将近20%ꎬ因此该结构基本上满足额定机械寿命要求ꎮ5㊀结㊀论本文运用ADAMS ̄Maxwell ̄Simulink实现了考虑电动斥力的VS1型真空断路器分闸过程动态特性的计算ꎻ然后针对分闸过程中冲击碰撞现象较为严重的触头弹簧结构ꎬ运用显式动力学分析与应变疲劳寿命理论相结合的方法计算出该结构的分闸操作寿命ꎬ在此基础上对其结构进行了优化改进ꎮ得出以下结论:1)触头断开时受到的洛伦兹力主要来源于杯座和触头片ꎻ并且触头片上的洛伦兹力是使触头斥开方向ꎬ触头杯座上的洛伦兹力是使触头闭合方向ꎬ二者方向相反ꎮ此外由于触头结构具有上下对称的特点ꎬ因此触头上电流方向无论是由静端流向动端㊁还是由动端流向静端ꎬ触头结构产生的电动斥力的方向及大小均不会发生改变ꎮ2)断路器分断过程中ꎬ在超程阶段ꎬ动静触头处于闭合状态ꎬ此时动触头承受的的电动力主要来源于触头片上互相斥开的霍尔姆力ꎬ故动触头承受的电动力方向为斥开方向ꎻ超程阶段结束之后ꎬ动静触头完全分离ꎬ此时动触头承受的的电动力主要来源于杯座上互相吸引的洛伦兹力ꎬ故动触头承受的电动力方向为闭合方向ꎮ3)在承受分闸冲击时ꎬ优化前的触头弹簧结构中ꎬ弹簧销部件会产生应力集中现象ꎬ其机械寿命最低ꎬ为2027次ꎻ而在优化后的触头弹簧结构中ꎬ由于拉杆与导向套间碰撞界面面积较大ꎬ因此可有效减弱应力集中现象ꎮ改进后触头弹簧系统的机械寿命为12030次ꎬ基本上满足断路器产品额定机械寿命的要求ꎮ本文建立的电-磁-机械动态特性耦合计算模型可计算出断路器机构载流条件下开断过程中机构的分闸动态特性㊁触头电动斥力变化以及机构部件的危险应力区域及其机械寿命ꎮ但论文所作研究仅是理论上仿真计算的结果ꎬ后续仍需要进一步开展相关实验进行验证ꎮ论文工作可在理论层面为断路器产品动态特性分析及其结构优化工作提供参考ꎮ参考文献:[1]㊀朱军ꎬ李波ꎬ阮江军ꎬ等.基于人工过零技术的直流真空分断过程分析及验证[J].电机与控制学报ꎬ2019ꎬ23(1):63.ZHUJunꎬLIBoꎬRUANJiangjunꎬetal.AnalysisandtestfortheDCvacuuminterruptionprocessbasedontheartificialcurrentzerotechnology[J].ElectricMachinesandControlꎬ2019ꎬ23(1):63. [2]㊀张丽萍ꎬ石敦义ꎬ缪希仁.低压断路器振动特性分析及其故障诊断研究[J].电机与控制学报ꎬ2016ꎬ20(10):82.ZHANGLipingꎬSHIDunyiꎬMIAOXiren.Researchonvibrationsignalfeatureanalysisanditsfaultdiagnosis[J].ElectricMa ̄chinesandControlꎬ2016ꎬ20(10):82.[3]㊀黄建ꎬ胡晓光ꎬ巩玉楠ꎬ等.高压断路器机械故障诊断专家系统设计[J].电机与控制学报ꎬ2011ꎬ15(10):43.HUANGJianꎬHUXiaoguangꎬGONGYunanꎬetal.Machineryfaultdiagnosisexpertsystemforhighvoltagecircuitbreaker[J].ElectricMachinesandControlꎬ2011ꎬ15(10):43. [4]㊀王建华ꎬ张国钢ꎬ闫静ꎬ等.高压开关电器发展前沿技术[M].北京:机械工业出版社ꎬ2019.[5]㊀刘颖异ꎬ陈德桂ꎬ李兴文ꎬ等.用三维有限元方法研究影响框架断路器电动斥力的因素[J].中国电机工程学报ꎬ2005ꎬ25(16):63.LIUYingyiꎬCHENDeguiꎬLIXingwenꎬetal.Researchonfactorsaffectingelectro ̄dynamicrepulsionforceinaircircuitbreakerswiththemethodof3 ̄Dfiniteelement[J].ProceedingsoftheCSEEꎬ2005ꎬ25(16):63.[6]㊀李兴文ꎬ陈德桂ꎬ向洪刚ꎬ等.低压塑壳断路器中电动斥力的三维有限元非线性分析与试验研究[J].中国电机工程学报ꎬ2004ꎬ24(2):150.LIXingwenꎬCHENDeguiꎬXIANGHonggangꎬetal.3 ̄Dfiniteel ̄ementnonlinearanalysisandexperimentalinvestigationofelectro ̄dynamicrepulsionforceinmoldedcasecircuitbreakers[J].Pro ̄ceedingsoftheCSEEꎬ2004ꎬ24(2):150.[7]㊀李兴文ꎬ陈德桂ꎬ李志鹏ꎬ等.考虑触头间电流收缩影响的低551第3期董华军等:考虑电动斥力的真空断路器刚柔耦合系统机械特性研究。
高压真空断路器主要机械特性参数高压真空断路器主要机械特性参数是通过对特性曲线的合理分析,从原理上阐明系统对断路器运行参数,反映的客观性和精确性。
对几个重要参数的标定方法如下。
(1)开距:真空断路器的额定电压和耐压直接打算着触头开距,假如额定电压低的话触头开距一般选择小点。
但是不能太小,否则分断力量和耐压水平会受到影响。
也不能太大,否则灭弧室的波纹管寿命会缩短的。
在设计的时候,满意运行要求的状况下选择开距小的。
一般额定电压在10kV时,开距通常在8~12mm。
在35kV时,开距通常在30~40mm。
(2)接触压力:在无外力作用时,动触头在大气压作用下,对内腔产生一个闭合力使其与静触头闭合,称之为自闭力,其大小取决于波纹管的端口直径。
当灭弧室在工作状态时,自闭力不能保证动静触头间良好的接触,必需施加一个外加压力。
这个外加压力和自闭力之和称为触头的接触压力。
接触压力作用有:保证动、静触头的良好接触;满意额定短路状态时的动稳定要求;抑制合闸弹跳;为分闸供应一个加速力。
(3)接触行程:接触行程就是触头弹簧的压缩距离,触头压弹簧施力端连续运动至终结的距离。
接触行程有两方面作用,一是给触头弹簧与对接触头供应接触压力;二是在运行磨损下但是又能具有肯定的接触压力。
一般接触行程可取开距的20%~30%左右,假如真空断路器的额定电压在10kV则接触行程也许为3~4mm。
(4)合闸速度与分闸速度:平均合闸速度主要影响触头的电磨损。
假如合闸速度太低并且电弧存在的时间过长,会增大触头表面的电磨损;合闸速度太高,可能会消失接触又弹回,产生合闸弹跳。
断路器的平均合闸速度通常取0.6~1.0m/s之间的数值。
断路器的分闸速度一般而言速度越快越好,这样可以提前几个毫秒断开故障电路,反弹太大震惊过剧亦简单产生燃弧重燃。
分闸速度假如太慢,则首开相连续至下一相,燃弧时间加长了,增加了开断的难度。
速度快慢主要取决于合闸时动触头弹簧和分闸弹簧的贮能大小。
高压真空断路器主要机械特性参数引言高压真空断路器是一种常用的电力保护设备,具有断电、隔离、短路等电气特性。
随着电力行业的不断发展,高压真空断路器的应用范围也越来越广泛,因此了解其主要机械特性参数是非常必要的。
本文将介绍高压真空断路器的主要机械特性参数,包括额定电压、额定电流、额定短路开断电流、额定短路关合电流、额定操作次数、操作机构类型等方面。
额定电压额定电压是指设备设计规格中所规定的最高允许工作电压。
高压真空断路器的额定电压一般为12KV、24KV、40.5KV等不同级别。
其电气性能参数与额定电压有关,具有不同的分断能力、绝缘水平和外形尺寸等,因此在选型、设计及使用过程中应严格按照额定电压进行。
额定电流额定电流是指设备设计规格中所规定的连续工作电流,也是标识断路器电气性能的重要参数之一。
它通常表示为一个具体数值,如630A、1250A、2000A等。
额定短路开断电流额定短路开断电流是指在正常电网运行的状态下,断路器可以安全地分离故障区域并切断负载电路的最大故障电流。
这个参数通常是用来表示断路器的分断能力的指标之一。
额定短路关合电流额定短路关合电流是指断路器可以正常合上的最大短路电流,一般比额定短路开断电流要大。
该参数反映了设备的合闸能力,对断路器的合闸时间、电弧特性等都有影响。
额定操作次数额定操作次数是指设备在设计寿命期间,正常运行的操作次数。
在额定电流和额定短路开断电流的前提下,当高压真空断路器达到额定操作次数后,其电气性能参数已经发生了变化,用户应当重新考虑是否需要更换。
操作机构类型高压真空断路器的操作机构主要有手动操作、电动操作、自动化控制操作等。
手动操作机构是基于人工操作来控制断路器的开关,操作相对简单;电动操作机构是基于电动机等电气元件来完成断路器的开关操作,控制信号可远程传输,具有更高的自动化水平;自动化控制操作除了具备电动操作的优势,还能实现自动化控制、状态监测、数据传输等多项功能,属于高效、智能化的操作方式。
真空断路器的机械特性发布时间:2011-8-12 8:50:30一、开距触头的开距主要取决于真空断路器的额定电压和耐压要求,一般额定电压低时触头开距选得小些。
但开距太小会影响分断能力和耐压水平。
开距太大,虽然可以提高耐压水平,但会使真空灭弧室的波纹管寿命下降。
设计时一般在满足运行的耐压要求下尽量把开距选得小一些。
10kV真空断路器的开距通常在8~12mm之间,35kV的则在30~40mm之间。
二、触头接触压力在无外力作用时,动触头在大气压作用下,对内腔产生一个闭合力使其与静触头闭合,称之为自闭力,其大小取决于波纹管的端口直径。
灭弧室在工作状态时,这个力太小不能保证动静触头间良好的电接触,必须施加一个外加压力。
这个外加压力和自闭力之和称为触头的接触压力。
这个接触压力有如下几个作用:(1)保证动、静触头的良好接触,并使其接触电阻少于规定值。
(2)满足额定短路状态时的动稳定要求。
应使触头压力大于额定短路状态时的触头间的斥力,以保证在该状态下的完全闭会和不受损坏。
(3)抑制合闸弹跳。
使触头在闭会碰撞时得以缓冲,把碰撞的动能转为弹兴的势能,抑制触头的弹跳。
(4)为分闸提供一个加速力。
当接触压力大时,动触头得到较大的分闸力,容易拉断会闹熔焊点,提高分闸初始的加速度,减少燃弧时间,提高分断能力。
触头接触压力是一个很重要的参数,在产品的初始设计中要经过多次验证、试验才选取得比较合适。
如触头压力选得太小,满足不了上述各方面的要求;但触头压力太大,一方面需要增大合闸操作功,另外灭弧室和整机的机械强度要求也需要提高,技术上不经济。
4.3接触行程(或称压缩行程) 目前真空断路器毫无例外地采用对接式接触方式。
动触头碰上静触头之后就不能再前进了,触头接触压力是由每极触头压缩弹簧(有时称作合闸弹簧)提供的。
所谓接触行程,就是开关触头碰触开始,触头压簧施力端继续运动至会闹终结的距离,亦即触头弹簧的压缩距离,故又称压缩行程。
接触行程有两方面作用,一是令触头弹簧受压而向对接触头提供接触压力;二是保证在运行磨依后仍然保持一定接触压力,使之可靠接触。
真空断路器机械特性分析论文1.分、合闸速度真空断路器对分闸速度是有一定要求的,因为它影响燃弧时间和弧后介质强度的恢复速度。
不同型号的真空断路器速度特性曲线形状有差别,但变化大致相同,而且其曲线是唯一的。
山于加丄质量和装配中的差异,同种真空断路器合闸前段和分闸后段会有不同,但合闸后段和分闸前段应当差异很小。
凸轮被空转储能簧拉动直至与滚子接触前的一段,这一段是空转。
理论上如无空转则真空灭弧室运动端速度从零开始(实际中为保证机构出力特性都有空转角度)。
按照动量守恒定律,空转角度变大初速度提高。
如CT19空转角度在8. 396° -17. 135°之间。
尽管对初速度影响不大,但对全行程所用时间影响却不小。
因为走过前1—2mm 空程所用时间占全行程时间的30%-40%<>对于分闸后段的速度差异则视缓冲特性而定。
其中分闸弹簧在全部分闸过程中都起作用,不仅影响断路器的刚分速度,而且还影响最大分闸速度分闸弹簧的力越大,释放能量越多,则刚分速度和最大速度越大。
触头弹簧只在超行程阶段起作用,因此对刚分速度有直接影响。
而且,触头本身的弹性及静触头系统的支撑部分的刚性也对分闸速度尤其是刚分速度有很大影响。
通常,具体速度的大小是通过试验进行测定的。
2.合闸弹跳U前,真空断路器均釆用对接式触头,且合闸速度较高,触头在合闸时就可能产主弹跳。
山于弹跳不但会使触头熔焊,产生过电压,而且还会使波纹管受强迫振动而出现裂纹,导致灭弧室漏气,所以合闸弹跳越小越好。
(1)合闸弹跳定义断路器在合闸时触头刚接触直至触头稳定接触瞬间为止的时间。
所有直读数据的开关特性测试仪都是按照这个定义来设计制造的。
影响灭弧室电寿命的是电弧,而电弧只有在动静触头不接触时才会产生,在动静触头接触时不会产生。
大量实践及理论分析均表明,真正对真空的电寿命有影响的因素是:合闸过程中,触头刚接触直至触头稳定接触瞬间为止,这期间的触头断开时间。
浅谈断路器机械特性的测试【摘要】随着社会的发展,人们对用电的安全可靠性要求越来越高,高压断路器在电力系统中担负着控制和保护的双重任务,其性能的优劣直接关系到电力系统的安全运行。
机械特性参数是判断断路器性能的重要参数之一,断路器的分合闸时间,分合闸不同期程度,分合闸速度以及线圈的动作电压等,直接影响断路器的切合性能,并且对继电保护,自动重合闸装置以及系统的稳定带来极大的影响。
本文阐述了高压断路器机械特性的定义,介绍了测试方法、可选用的测量仪器及其改进对策。
关键词断路器;机械特性;测量0概述高压断路器是电力系统的重要设备之一,其最大特点是能断开电路中负荷电流和短路电流。
断路器的机械特性直接影响断路器的开断性能。
对断路器进行机械方面的测试的目的是:第一,保证断路器的技术参数符合规程要求,以使断路器能可靠地投入运行;第二,在检修过程中通过测试可以掌握开关的机械性能,以便确定检修重点,有目的地进行调整,保证检修质量。
1定义1.1分闸时间指处于合闸位置的断路器从接到分闸指令瞬间起到所有触头分开瞬间为止的时间间隔。
1.2合闸时间指处于分闸位置的断路器从接到合闸指令瞬间到所有触头接触瞬间的时间间隔。
1.3合分时间从接到合(分)闸指令瞬间起到所有极触头都接触(分离)瞬间的时间间隔。
1.4三相不同期指断路器三相分(合)闸时间之间的最大及最小值差值。
1.5弹跳时间指断路器的动、静触头在合闸过程中发生的所有接触、分离(即弹跳)的累计时间差值(即第一次接触到完全接触的时间)。
1.6弹跳幅度开关动触头运动过程中,动触头的最大反弹值。
1.7速度各制造厂对速度的定义各不相同,因此,《电力设备交接及预防性试验规程实施细则》规定分闸速度和合闸速度的测试要按照制造厂的要求进行。
一般,断路器的速度是指其在单分、单合动作时的平均速度,而不是行程中的最大速度。
1.8刚合(分)速度开关合(分)闸过程中,动触头与静触头接触(分离)瞬间的运动速度。
关于真空断路器的机械特性1 引言真空断路器的主要特点在于利用真空作为触头间的绝缘与灭弧介质,由于触头为对接式结构,使得其机械特性参数与其它结构(如插入式)不同。
真空断路器的机械特性表现为动触头相对于静触头的运动特性。
笔者通过对真空断路器机械参数的试验和分析,对传统分析、测试方法进行探讨,对机械参数在设计、使用、测试等方面存在的问题提出看法。
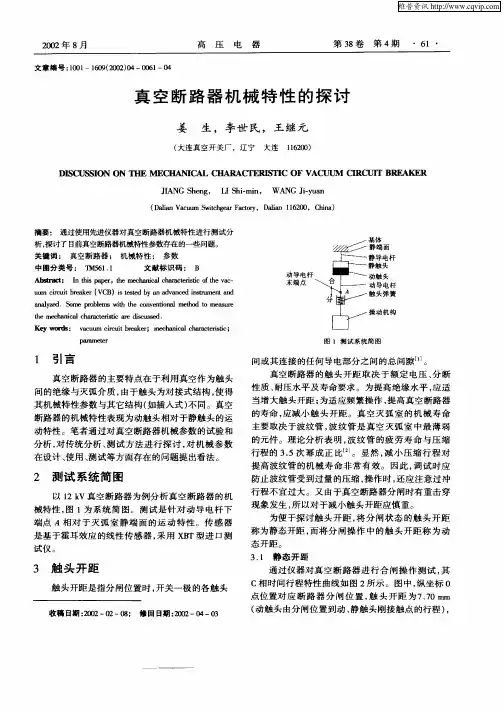
2 测试系统简图以12kv真空断路器为例分析真空断路器的机械特性,图1为系统简图。
测试是针对动导电杆下端点A相对于灭弧室静端面的运动特性。
传感器是基于霍耳效应的线性传感器,采用XBT型进口测试仪。
3 触头开距触头开距是指分闸位置时,开关一极的各触头间或其连接的任何导电部分之间的总间隙[1]。
真空断路器的触头开距取决于额定电压、分断性质、耐压水平及寿命要求。
为提高绝缘水平,应适当增大触头开距;为适应频繁操作,提高真空断路器的寿命,应减小触头开距。
真空灭弧室的机械寿命主要取决于波纹管,波纹管是真空灭弧室中最薄弱的元件。
理论分析表明,波纹管的疲劳寿命与压缩行程的35次幂成正比[2]。
显然,减小压缩行程对提高波纹管的机械寿命非常有效。
因此,调试时应防止波纹管受到过量的压缩,操作时,还应注意过冲行程不宜过大。
又由于真空断路器分闸时有重击穿现象发生,所以对于减小触头开距应慎重。
为便于探讨触头开距,将分闸状态的触头开距称为静态开距,而将分闸操作中的触头开距称为动态开距。
3.1 静态开距通过仪器对真空断路器进行合闸操作测试,其C相时间行程特性曲线如图2所示。
图中,纵坐标0点位置对应断路器分闸为证,触头开距为7.70mm(动触头由分闸位置到动、静触头刚接触点的行程),即动、静触头导电部分间的间隙。
测量触头开距的传统方法是:分别测量动导电杆上一点在分、合闸位置时相对于同一基准的距离,二者之差则为触头开距,对应于图2中,分闸位置到合闸位置的行程10.28mm,与真实间隙相差2.58 mm。
断路器机械特性在线监测的研究发布时间:2022-01-19T02:23:20.633Z 来源:《新型城镇化》2021年24期作者:程欣王强[导读] 近年来,由于经济繁荣和能源需求增加,提高电力系统的可靠性和经济效益。
断路器的可靠运行作为发电和电力之间的连接对网络安全至关重要。
电力系统中断路器具有两种功能:国网菏泽供电公司山东菏泽 27400摘要:断路器是高压电器中最重要的电力系统,其重要性显而易见。
为了提高其运行可靠性,需要采取必要的检查和维护措施。
其大部分事故都是机械造成的。
因此,研究诊断断路器的机械故障很重要。
在线监测在断路器机械是机构发展的必要趋势,也是智能断路器未来研究的重要内容。
关键词:断路器;在线监测;故障诊断近年来,由于经济繁荣和能源需求增加,提高电力系统的可靠性和经济效益。
断路器的可靠运行作为发电和电力之间的连接对网络安全至关重要。
电力系统中断路器具有两种功能:一是控制,也就是说,启动或关闭某些设备或电路,包括电网运行更换或修理电源;二是保护功能,当电气设备或电路发生故障时,断路器使用继电器保护和自动装置工作。
故障部分迅速从电网中取出,保护电网中的故障部分。
我国电气设施的检修工作目前主要是根据电气预防措施的规定,定期进行预防性试验,以根据试验结果确定设备状况,确定设备长期是否正常运行,并确保不断进行预防试验,对安全运行电力系统的发挥关键作用。
但是,鉴于电力系统的性能、压力和结构复杂性、工农业和能源部门的发展日益重要,越来越有必要制定电力系统的安全和可靠性指标。
这些传统的检测和诊断方法变得越来越困难。
一、断路器机械特性在线监测的目的和意义断路器故障是由于检修错误造成的,在检修过程中完全解体,断路器既耗时又昂贵,而且需要花费断路器成本的三分之一到三分之二。
此外,拆卸和重新安装可能会出现许多缺陷和事故。
同时,统计数据显示,断路器维护费用是变电站的一半以上,其中60%用于小规模维护和日常维护。
10kV真空断路器机械特性的重要性及调整方法摘要:10kV真空断路器机械特性直接影响其关合、分断短路电流的能力及产品的机构寿命,文中主要介绍机械特性:触头开距、触头接触行程、合闸弹跳时间、分合闸速度、分合闸不同期性此五项参数的调整方法及调整不当时对电网的危害。
Abstract: the mechanical characteristics of 10kV vacuum circuit breaker directly affect its ability of closing and breaking short-circuit current and the service life of the product. This paper mainly introduces the mechanical characteristics: the adjustment methods of the five parameters of contact opening distance, contact travel, closing bounce time, opening and closing speed, and opening and closing asynchrony, and the harm to the power grid caused by the improper adjustment.关键词:触头开距、触头接触行程、合闸弹跳时间、分合闸速度、分合闸不同期性Key words: contact opening distance, contact travel, closing bounce time, opening and closing speed, opening and closing asynchrony1 引言真空断路器具有较高的关合、分断短路电流的能力,良好的灭弧特性,机械寿命长,模块化的机械操作机构,维护量小,检修周期长的特点。
谈真空断路器性能分析摘要:断路器是关系到电网稳定运行和用电可靠性的前提保障, 它的性能关系到电网的每一刻运行。
本文对真空断路器的特点和分、合闸弹跳等各方面对真空断路器机械特性进行了有意义的探讨。
关键词:真空断路器;绝缘特性;分、合闸性能分析引言:从目前的使用状况来看, 抽查中暴露的主要问题表现之一就是产品机械特性的缺陷,如触头行程、平均分、合闸速度实测值超出产品技术条件的规定范围。
显然, 为了提高其产品的质量, 对断路器机械特性的主要技术参数进行有意义的探讨是必要的。
1.真空断路器的主要特点1.1 真空的绝缘特性真空具有很强的绝缘特性, 在真空断路器中, 气体非常稀薄, 气体分子的自由行程相对较大, 发生相互碰撞的几率很小, 因此, 碰撞游离不是真空间隙击穿的主要原因, 而在高强电场作用下由电极分析出的金属质点才是引起绝缘破坏的主要因素。
真空间隙中的绝缘强度不仅与间隙的大小、电场的均匀程度有关, 而且受电极材料的性质及表面状况的影响较大。
真空间隙在较小的距离间隙( 2~3mm) 情况下, 有比空气与SF6 气体高的绝缘特性, 这就是真空断路器的触头开距一般不大的原因。
电极材料对击穿电压的影响主要表现在材料的机械强度( 抗拉强度) 和金属材料的熔点上。
抗拉强度和熔点越高, 电极在真空下的绝缘强度越高。
实验表明, 真空度越高, 气体间隙的击穿电压越高, 所以, 要保证真空灭弧室的绝缘强度。
1.2 真空中电弧的形成与熄灭真空电弧和我们以前学习的气体电弧放电现象有很大的差别, 气体的游离现象是产生电弧的主要因素, 真空电弧放电是在触头电极蒸发出来的金属蒸汽中形成的。
同时, 开断电流的大小不同, 电弧表现的特点也不同, 所以,我们一般把它分为小电流真空电弧和大电流真空电弧。
1.2.1 小电流真空电弧触头在真空中开断时, 产生的电流和能量集聚在阴极斑点, 从阴极斑点上大量的蒸发金属蒸汽, 其中的金属原子和带电质点的密度都很高, 电弧就在其中燃烧。
浅谈真空断路器机械特性的在线监测方法摘要:真空断路器近年来颇受工矿企业、发电厂和变电站的音睐。
作为开关电器中最为重要的一种电器。
在电力系统中肩负粉控制和保护设备的双重作用。
但其可能发生的各类故障也常威胁到人们生命财产的安全,甚至威胁到整个电力系统的安全运行。
因此,掌握对真空断路器机械特性进行在线监测的技术十分重要,本研究就最新研发的界面友好、易于操作、功能齐全、工作稳定、精度较高和扩展空间大的在线监测系统进行简单介绍。
关健词:真空断路器;在线监测;机械特性引言:国际大电网会议对高压断路器可靠性所做的2次世界范围的调查及我国电力部门对高压开关事故的统计分析均表明,高压断路器的大多数故障(主要故障的70%和次要故障的86%)发生在机械机构。
主要涉及操动机构、监视装置和辅助装置等,大多数是由于机械特性不良造成的,如拒分、拒合或不能开断等。
其它灭弧、绝缘故障占较小的比例,发热故障比例更低。
高压断路器机械故障所造成的事故在次数、事故所造成的停电时间上均占总量60%以上。
因此,及时了解高压断路器的机械工作状态对提高供电可靠性有重要的现实意义,并可以减少盲目定期检修带来的资金浪费。
真空断路器作为电力输配电系统中最关键、最广泛的开关电器之一,肩负着控制和保护的双重任务,其机械性能的可靠性关系到电力系统的安全运行。
真空断路器的可靠性在很大程度上取决于其机械操动机构状态的可靠性。
因而,真空断路器机械特性的在线监测显得尤为重要。
目前,国内外都在致力于检测手段的研究和开发,真空断路器机械特性在线监测技术已经进入一个新的发展阶段,一些新理论、新技术、新的检测手段正在被开发、运用。
随着传感器技术、微电子技术和计算机通讯技术的迅速发展,为真空断路器机械特性的在线测量提供了技术基础。
本文所述的真空断路器机械特性在线监测装置,能实现对合、分闸线圈电流信号、动触头的行程信号、主回路三相电流信号和辅助开关位置转换等信号的检测,较好地实现了机械特性参数的显示、存储、打印和数据通讯等。