(完整版)无刷直流电机数学模型完整版
- 格式:docx
- 大小:269.39 KB
- 文档页数:13
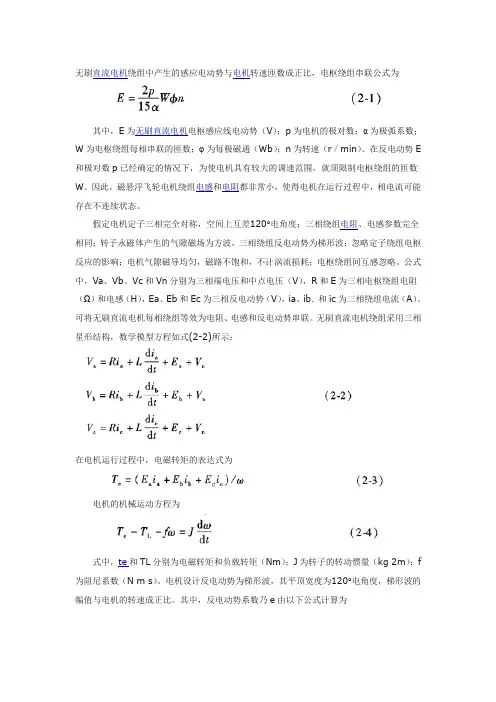
无刷直流电机绕组中产生的感应电动势与电机转速匝数成正比,电枢绕组串联公式为其中,E为无刷直流电机电枢感应线电动势(V);p为电机的极对数;α为极弧系数;W为电枢绕组每相串联的匝数;φ为每极磁通(Wb);n为转速(r/min)。
在反电动势E 和极对数p已经确定的情况下,为使电机具有较大的调速范围,就须限制电枢绕组的匝数W。
因此,磁悬浮飞轮电机绕组电感和电阻都非常小,使得电机在运行过程中,相电流可能存在不连续状态。
假定电机定子三相完全对称,空间上互差120°电角度;三相绕组电阻、电感参数完全相同;转子永磁体产生的气隙磁场为方波,三相绕组反电动势为梯形波;忽略定子绕组电枢反应的影响;电机气隙磁导均匀,磁路不饱和,不计涡流损耗;电枢绕组间互感忽略。
公式中,Va、Vb、Vc和Vn分别为三相端电压和中点电压(V),R和E为三相电枢绕组电阻(Ω)和电感(H),Ea、Eb和Ec为三相反电动势(V),ia、ib.和ic为三相绕组电流(A)。
可将无刷直流电机每相绕组等效为电阻、电感和反电动势串联。
无刷直流电机绕组采用三相星形结构,数学模型方程如式(2-2)所示:在电机运行过程中,电磁转矩的表达式为电机的机械运动方程为式中,te和TL分别为电磁转矩和负载转矩(Nm);J为转子的转动惯量(kg·2m);f 为阻尼系数(N·m·s)。
电机设计反电动势为梯形波,其平顶宽度为120°电角度,梯形波的幅值与电机的转速成正比。
其中,反电动势系数乃e由以下公式计算为电机转子每运行60°电角度进行一次换相,因此在每个电角度周期中,三相绕组反电动势有6个状态。
电机运行过程中瞬态功耗的公式为其中,Ω为电机角速度,P为功耗。
永磁无刷直流电机的控制可分为三相半控、三相全控两种。
三相半控电路的特点简单,-个可控硅控制一相的通断,每个绕组只通电1/3的时间,另外2/3时间处于断开状态,没有得到充分的利用。
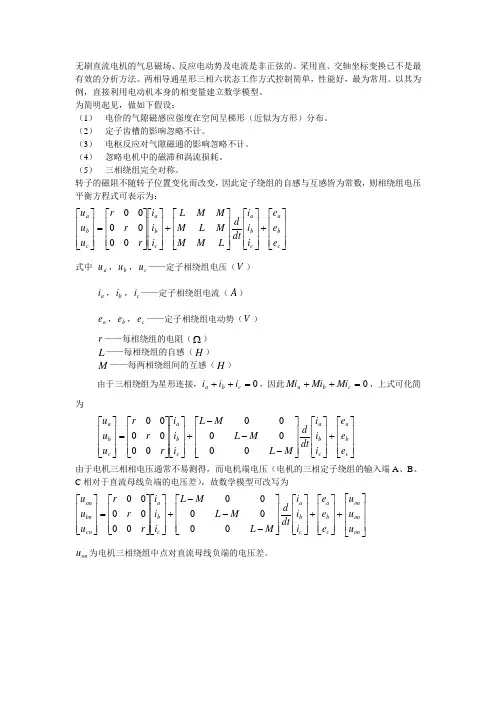
无刷直流电机的气息磁场、反应电动势及电流是非正弦的。
采用直、交轴坐标变换已不是最有效的分析方法。
两相导通星形三相六状态工作方式控制简单,性能好,最为常用。
以其为例,直接利用电动机本身的相变量建立数学模型。
为简明起见,做如下假设:(1) 电价的气隙磁感应强度在空间呈梯形(近似为方形)分布。
(2) 定子齿槽的影响忽略不计。
(3) 电枢反应对气隙磁通的影响忽略不计。
(4) 忽略电机中的磁滞和涡流损耗。
(5) 三相绕组完全对称。
转子的磁阻不随转子位置变化而改变,因此定子绕组的自感与互感皆为常数,则相绕组电压平衡方程式可表示为: ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c b a c b a c b a c b a e e e i i i dt d L MMM L M M M Li i i r r r u u u 00000 式中 a u ,b u ,c u ——定子相绕组电压(V ) a i ,b i ,c i ——定子相绕组电流(A )a e ,b e ,c e ——定子相绕组电动势(V )r ——每相绕组的电阻(Ω) L ——每相绕组的自感(H ) M ——每两相绕组间的互感(H )由于三相绕组为星形连接,0=++c b a i i i ,因此0=++c b a Mi Mi Mi ,上式可化简为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c b a c b a c b a c b a e e e i i i dt d M L M L ML i i i r r ru u u 0000000000由于电机三相相电压通常不易测得,而电机端电压(电机的三相定子绕组的输入端A 、B 、C 相对于直流母线负端的电压差),故数学模型可改写为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡onononc b a c b a c b a cnbn anu uu e e e i i i dt d M L M L ML i i i r r ru u u 0000000000 on u 为电机三相绕组中点对直流母线负端的电压差。
无刷电机数学模型无刷电机是一种采用电子换向技术的电机,相比传统的有刷电机具有更高的效率和可靠性。
为了研究和设计无刷电机,需要建立相应的数学模型来描述其运动和特性。
本文将介绍无刷电机的数学模型,并阐述其在电机控制和设计中的应用。
无刷电机的数学模型主要包括电机动力学模型和电机电磁模型。
电机动力学模型描述了电机的运动学和动力学特性,而电机电磁模型描述了电机的电磁特性。
电机动力学模型是无刷电机的核心模型之一,它描述了电机的运动学和动力学特性。
在电机动力学模型中,需要考虑转子转动惯量、电机的电磁转矩和摩擦转矩等因素。
通过建立电机动力学方程,可以得到电机的转速、转矩和加速度等运动参数。
电机电磁模型是无刷电机的另一个重要模型,它描述了电机的电磁特性。
电机电磁模型中,需要考虑电机的磁场分布、电机的磁链和电机的电流等因素。
通过建立电机电磁方程,可以得到电机的磁场分布、磁链和磁场强度等电磁参数。
在实际的电机控制和设计中,无刷电机数学模型起着重要的作用。
通过建立电机数学模型,可以对电机进行仿真和分析,预测电机的性能和特性。
同时,电机数学模型也为电机的控制器设计提供了依据。
通过建立电机数学模型,并结合控制算法,可以实现对电机的精确控制和高效运行。
除了在电机控制和设计中的应用,无刷电机数学模型还可以用于电机性能评估和优化设计。
通过对电机数学模型的分析和优化,可以提高电机的效率、减小电机的功耗,进一步提升电机的性能和可靠性。
无刷电机数学模型是研究和设计无刷电机的重要工具。
通过建立电机动力学模型和电机电磁模型,可以对电机的运动和电磁特性进行描述和分析。
在电机控制和设计中,无刷电机数学模型的应用可以实现对电机的精确控制和高效运行。
同时,无刷电机数学模型也为电机的性能评估和优化设计提供了依据。
通过对电机数学模型的分析和优化,可以提高电机的效率和可靠性,进一步提升电机的性能。
因此,无刷电机数学模型的研究和应用具有重要的意义。
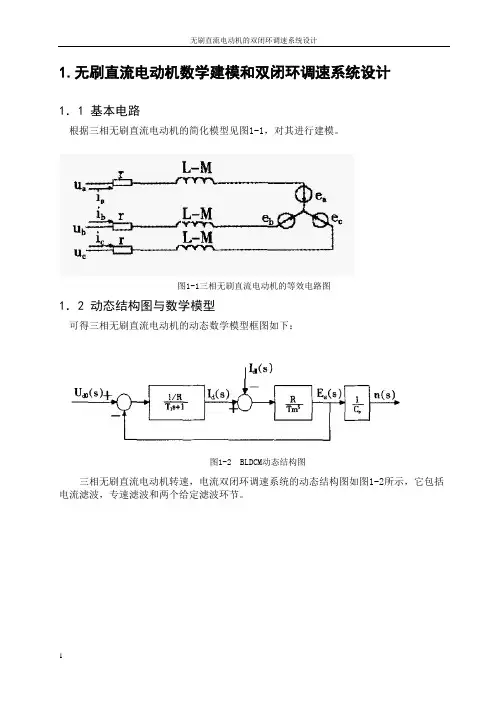
1.无刷直流电动机数学建模和双闭环调速系统设计1.1 基本电路根据三相无刷直流电动机的简化模型见图1-1,对其进行建模。
图1-1三相无刷直流电动机的等效电路图1.2 动态结构图与数学模型可得三相无刷直流电动机的动态数学模型框图如下:图1-2 BLDCM动态结构图三相无刷直流电动机转速,电流双闭环调速系统的动态结构图如图1-2所示,它包括电流滤波,专速滤波和两个给定滤波环节。
2、电流环设计2.1电流环动态结构以及简化图在图2-1中虚线框内就是电流环的动态结构图,可以看到在电流环内存在电动机反电动势产生的交叉反馈,它代表转速环输出量对电流环的影响。
由于转速环尚未设计,要考虑它的影响是比较困难的。
但是,在实际系统中,由于电枢回路的电磁时间常数1T 一般都要比电力拖动系统的机电时间常数m T 小的多,因而电流的调节过程往往比转速的变化过程快得多,也就是比电动机反电动势E 的变化快得多。
反电动势对电流环来说只是一个缓慢变化的扰动作用,当电流调节过程结束时,反电动势只有很小的变化。
因此在电流调节器得快速调节过程中,可以认为反电动势E 基本不变,即认为∆E ≈0.这样,在设计电流环时可以暂时不考虑反电势变化的影响,将作用于电流环的电势反馈作用断开,从而解除了交叉反馈,得到了如图2-2(a )所示的忽略了反电势作用的电流环近似动态结构图。
再根据结构图的等效变换原则,并按近似处理方法将晶闸管触发与整流装置的滞后时间常数s T 和滤波时间常数oi T 合并成∑iT ,即将晶闸管触发和整流装置的传递函数stss e K -近似成惯性环节()1+s T K s s 后同()1+s T K oi s都当作小惯性环节近似处理,则s oi i T T T +=∑,从而得到图2-2B 所示的电流环简化结构图。
图2-1 转速电流双闭环调速系统的动态结构图图2-2(a)图2-2(b)图2-2 电流环的动态结构图及简化当然,上述简化都是有条件的:⎪⎪⎭⎫⎝⎛≤soi s ci T T T 1,1min 31ω 按典型I 型系统来选择电流调节器。

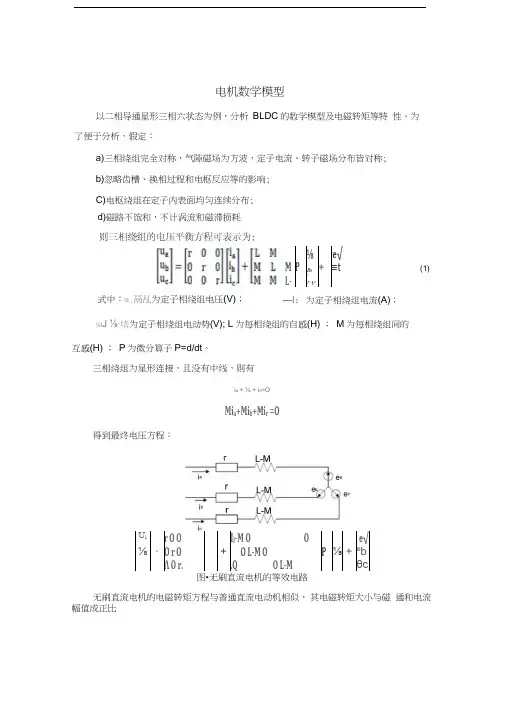
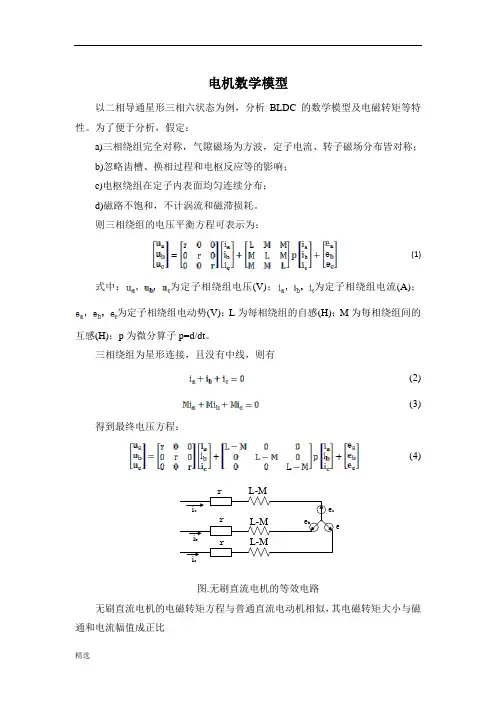
电机数学模型以二相导通星形三相六状态为例,分析 BLDC 的数学模型及电磁转矩等特 性。
为了便于分析,假定:a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; C)电枢绕组在定子内表面均匀连续分布;⅛t J ⅛∙堵为定子相绕组电动势(V); L 为每相绕组的自感(H) ; M 为每相绕组间的互感(H) ; P 为微分算子P=d/dt 。
三相绕组为星形连接,且没有中线,则有i a + ⅛ + i c =OMi a +Mi b +Mi r =O得到最终电压方程:U ir O OI f -M O Oe√⅛ =O r O+ O L-M O P⅛ + ebΛ O r..Q O L-Mθc .图•无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似, 其电磁转矩大小与磁 通和电流幅值成正比⅛-e√M P Jb+ ≡t L-* -* 1* -(1)—I :为定子相绕组电流(A);d)磁路不饱和,不计涡流和磁滞损耗式中:=.鬲乩为定子相绕组电压(V);Tβ=[e l i1+e b⅛+⅛]^所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。
为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,贝U:电磁功率可表示为:电磁转矩又可表示为:无刷直流电机的运动方程为:血(8) 其中I为电磁转矩;为负载转矩;B为阻尼系数;起为电机机械转速;J为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示:图2.无刷直流电机动态结构图由无刷直流电机动态结构图可求得其传递函数为… K I… K2n(s) = ~~—U(S) ---------- T L1 + T m s l+‰s L式中:Ki为电动势传递系数,【;:• L : , Ce为电动势系数;⅛K2为转矩传递函数,• - 一一,R为电动机内阻,Ct为转矩系数;⅛⅛Tm为电机时间常数,’1 .. ―一,G为转子重量,D为转子直径。
电机数学模型以二相导通星形三相六状态为例,分析BLDC 的数学模型及电磁转矩等特性。
为了便于分析,假定:a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。
则三相绕组的电压平衡方程可表示为:(1)式中:为定子相绕组电压(V);为定子相绕组电流(A);为定子相绕组电动势(V);L 为每相绕组的自感(H);M 为每相绕组间的互感(H);p 为微分算子p=d/dt 。
三相绕组为星形连接,且没有中线,则有(2) (3)得到最终电压方程:(4)L-ML-M L-Mrr ri a i b i ce ae ce b图.无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比(5)所以控制逆变器输出方波电流的幅值即可以控制BLDC 电机的转矩。
为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,则:电磁功率可表示为:(6)电磁转矩又可表示为:(7)无刷直流电机的运动方程为:(8)其中为电磁转矩;为负载转矩;B 为阻尼系数;为电机机械转速;J 为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示:Ct365/(GD^2s)Ce1/RU(s)+-+-T L (s)T C (s)I(s)N(s)图2.无刷直流电机动态结构图由无刷直流电机动态结构图可求得其传递函数为:式中:K1为电动势传递系数,,Ce 为电动势系数;K2为转矩传递函数,,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,,G 为转子重量,D 为转子直径。
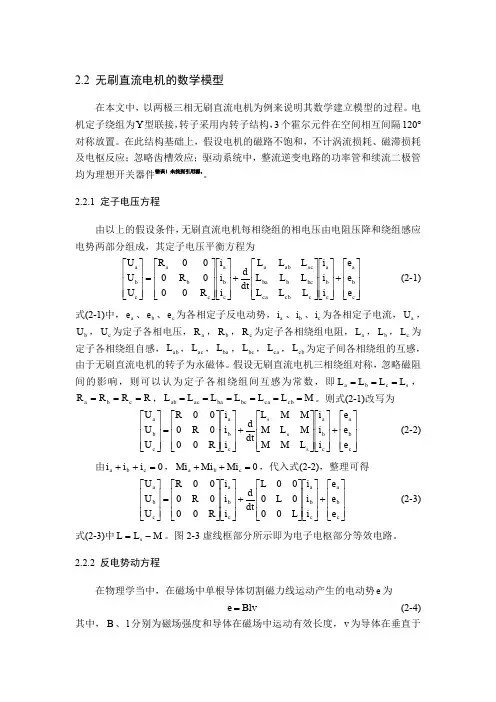
2.2 无刷直流电机的数学模型在本文中,以两极三相无刷直流电机为例来说明其数学建立模型的过程。
电机定子绕组为Y 型联接,转子采用内转子结构,3个霍尔元件在空间相互间隔120°对称放置。
在此结构基础上,假设电机的磁路不饱和,不计涡流损耗、磁滞损耗及电枢反应;忽略齿槽效应;驱动系统中,整流逆变电路的功率管和续流二极管均为理想开关器件错误!未找到引用源。
2.2.1 定子电压方程由以上的假设条件,无刷直流电机每相绕组的相电压由电阻压降和绕组感应电势两部分组成,其定子电压平衡方程为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c b a c b a c cbcabc b baac ab ac b a c b ac b a e e e i i i L L L L L L L L L dtd i i i R 00R 000R U U U (2-1)式(2-1)中,a e 、b e 、c e 为各相定子反电动势,a i 、b i 、c i 为各相定子电流,a U ,b U ,c U 为定子各相电压,a R ,b R ,c R 为定子各相绕组电阻,a L ,b L ,c L 为定子各相绕组自感,ab L ,ac L ,ba L ,bc L ,ca L ,cb L 为定子间各相绕组的互感,由于无刷直流电机的转子为永磁体。
假设无刷直流电机三相绕组对称,忽略磁阻间的影响,则可以认为定子各相绕组间互感为常数,即s c b a L L L L ===,R R R R c b a ===,M L L L L L L cb ca bc ba ac ab ======。
则式(2-1)改写为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c b a c b a s s sc b a c b a e e e i i i L MMM L M M M L dt d i i i R 00R 000RU U U (2-2)由0i i i c b a =++,0Mi Mi Mi c b a =++,代入式(2-2),整理可得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c b a c b a c b a c b a e e e i i i L 000L 000L dt d i i i R 00R 000RU U U (2-3)式(2-3)中M L L s -=。
电机数学模型以二相导通星形三相六状态为例,分析BLDC 的数学模型及电磁转矩等特性。
为了便于分析,假定:a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。
则三相绕组的电压平衡方程可表示为:(1)式中:为定子相绕组电压(V);为定子相绕组电流(A);为定子相绕组电动势(V);L 为每相绕组的自感(H);M 为每相绕组间的互感(H);p 为微分算子p=d/dt 。
三相绕组为星形连接,且没有中线,则有(2) (3)得到最终电压方程:(4)ce c图.无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比(5)所以控制逆变器输出方波电流的幅值即可以控制BLDC 电机的转矩。
为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,则:电磁功率可表示为:(6)电磁转矩又可表示为:(7)无刷直流电机的运动方程为:(8)其中为电磁转矩;为负载转矩;B 为阻尼系数;为电机机械转速;J 为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示:图2.无刷直流电机动态结构图由无刷直流电机动态结构图可求得其传递函数为:式中:K1为电动势传递系数,,Ce 为电动势系数;K2为转矩传递函数,,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,,G 为转子重量,D 为转子直径。
基于MATLAB的BLDC系统模型的建立在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,这种方法实质上是一种整体分析法,因而这一模型基础上修改控制算法或添加、删除闭环就显得很不方便;为了克服这一不足,提出在Matlab/Simulink中构造独立的功能模块,通过模块组合进行BLDC建模,这一方法可观性好,在原有建模的基础上添加、删除闭环或改变控制策略都十分便捷,但该方法采用快速傅立叶变换(FFT)方法求取反电动势,使得仿真速度受限制。
无刷直流电机的建模与仿真相对于传统的有刷直流电机,无刷直流电机的特点表现为:使用寿命长、效率更高、低噪声、启动转矩大等特点,在军事,伺服控制、家用电器等领域被广泛应用,文章首先研究无刷直流电机基础结构,其次分析其数学模型,并用Maltab 搭建了无刷直流电机控制系统的仿真模型,详细介绍了电机本体,转速控制,转矩计算等模块的功能和实现方法,通过仿真,证明了该模型的可行性。
标签:无刷直流电机;仿真;模型1 无刷直流电机的数学模型以两相导通星形三相六状态为例,设ua,ub,uc是三相定子电压;ea,eb,ec是三相定子反电动势,ia,ib,ic为三相定子电流,La,Lb,Lc是三相定子自感,Lab,Lac,Lba,Lba,Lca,Lca为三相定子绕组互感,Ra,Rb,Rc为三相绕组的相电阻,P为微分算子(d/dt)。
1.1 电压方程由于假设电机三相绕组完全对称,所以有ia+ib+ic=0且Mia+Mib+Mic=0,将这两个等式带入,经过化简,得到电压方程为:1.2 转矩方程无刷直流电机的转矩方程如下:?棕无刷直流电机转子的机械角速度(rad/s)无刷直流电机的机械运动方程可表示为:TL其中负载转矩(N·m);J是电机的转动惯量(Kg·m2)。
2 基于MATLAB/Simulink的无刷直流电机控制系统建模在MATLAB/Simulink环境下,在了解和分析了无刷直流电机的数学模型后,建立无刷直流电机控制系统仿真模型,该控制系统采用双闭环控制方案,转速环为外环,采用PI调节器,内环是电流环,在建模之前作以下假定:(1)不计电枢反应,换向过程等的影响;(2)磁路不饱和,忽略磁滞和涡流的影响;(3)假设三相绕组,定子电流,转子磁场分布完全对称,气隙磁场为方波;(4)假设外加电源为理想的直流恒压电源。
根据模块化的思想,系统可以由以下几个子模块构成:2.1 无刷直流电机本体无刷直流电机本体模块是关键的部分。
电机数学模型以二相导通星形三相六状态为例,分析BLDC 的数学模型及电磁转矩等特性。
为了便于分析,假定:a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。
则三相绕组的电压平衡方程可表示为:(1)式中:为定子相绕组电压(V);为定子相绕组电流(A);为定子相绕组电动势(V);L 为每相绕组的自感(H);M 为每相绕组间的互感(H);p 为微分算子p=d/dt 。
三相绕组为星形连接,且没有中线,则有(2) (3)得到最终电压方程:(4)L-ML-M L-Mrr ri a i b i ce ae ce b图.无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比(5)所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。
为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,则:电磁功率可表示为:(6)电磁转矩又可表示为:(7)无刷直流电机的运动方程为:(8)其中为电磁转矩;为负载转矩;B为阻尼系数;为电机机械转速;J 为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示:Ct365/(GD^2s) Ce1/R U(s)+-+-T L(s)T C(s)I(s)N(s)图2.无刷直流电机动态结构图由无刷直流电机动态结构图可求得其传递函数为:式中:K1为电动势传递系数,,Ce 为电动势系数;K2为转矩传递函数,,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,,G 为转子重量,D 为转子直径。
电机数学模型以二相导通星形三相六状态为例,分析BLDC 的数学模型及电磁转矩等特性。
为了便于分析,假定:a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。
则三相绕组的电压平衡方程可表示为:(1)式中:为定子相绕组电压(V);为定子相绕组电流(A);为定子相绕组电动势(V);L 为每相绕组的自感(H);M 为每相绕组间的互感(H);p 为微分算子p=d/dt 。
三相绕组为星形连接,且没有中线,则有(2) (3)得到最终电压方程:(4)ce c图.无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比(5)所以控制逆变器输出方波电流的幅值即可以控制BLDC 电机的转矩。
为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,则:电磁功率可表示为:(6)电磁转矩又可表示为:(7)无刷直流电机的运动方程为:(8)其中为电磁转矩;为负载转矩;B 为阻尼系数;为电机机械转速;J 为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示:图2.无刷直流电机动态结构图由无刷直流电机动态结构图可求得其传递函数为:式中:为电动势传递系数,,Ce 为电动势系数;K1为转矩传递函数,,R 为电动机内阻,Ct 为转矩系数;K2为电机时间常数,,G 为转子重量,D 为转子直径。
Tm基于MATLAB的BLDC系统模型的建立在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,这种方法实质上是一种整体分析法,因而这一模型基础上修改控制算法或添加、删除闭环就显得很不方便;为了克服这一不足,提出在Matlab/Simulink中构造独立的功能模块,通过模块组合进行BLDC建模,这一方法可观性好,在原有建模的基础上添加、删除闭环或改变控制策略都十分便捷,但该方法采用快速傅立叶变换(FFT)方法求取反电动势,使得仿真速度受限制。
电机数学模型以二相导通星形三相六状态为例,分析BLDC 的数学模型及电磁转矩等特性。
为了便于分析,假定:a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。
则三相绕组的电压平衡方程可表示为:(1)式中:为定子相绕组电压(V);为定子相绕组电流(A);为定子相绕组电动势(V);L 为每相绕组的自感(H);M 为每相绕组间的互感(H);p 为微分算子p=d/dt 。
三相绕组为星形连接,且没有中线,则有(2) (3)得到最终电压方程:(4)ce c图.无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比(5)所以控制逆变器输出方波电流的幅值即可以控制BLDC 电机的转矩。
为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,则:电磁功率可表示为:(6)电磁转矩又可表示为:(7)无刷直流电机的运动方程为:(8)其中为电磁转矩;为负载转矩;B 为阻尼系数;为电机机械转速;J 为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示:图2.无刷直流电机动态结构图由无刷直流电机动态结构图可求得其传递函数为:式中:K1为电动势传递系数,,Ce 为电动势系数;K2为转矩传递函数,,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,,G 为转子重量,D 为转子直径。
基于MATLAB的BLDC系统模型的建立在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,这种方法实质上是一种整体分析法,因而这一模型基础上修改控制算法或添加、删除闭环就显得很不方便;为了克服这一不足,提出在Matlab/Simulink中构造独立的功能模块,通过模块组合进行BLDC建模,这一方法可观性好,在原有建模的基础上添加、删除闭环或改变控制策略都十分便捷,但该方法采用快速傅立叶变换(FFT)方法求取反电动势,使得仿真速度受限制。
电机数学模型以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。
为了便于分析,假定:a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称;b)忽略齿槽、换相过程和电枢反应等的影响;c)电枢绕组在定子内表面均匀连续分布;d)磁路不饱和,不计涡流和磁滞损耗。
则三相绕组的电压平衡方程可表示为:(1)式中:为定子相绕组电压(V);为定子相绕组电流(A);为定子相绕组电动势(V);L为每相绕组的自感(H);M为每相绕组间的互感(H);p为微分算子p=d/dt。
三相绕组为星形连接,且没有中线,则有(2)(3)得到最终电压方程:(4)图.无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比(5)所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。
为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,则:电磁功率可表示为:(6)电磁转矩又可表示为:(7)无刷直流电机的运动方程为:(8)其中为电磁转矩;为负载转矩;B为阻尼系数;为电机机械转速;J为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示:图2.无刷直流电机动态结构图由无刷直流电机动态结构图可求得其传递函数为:式中:K1为电动势传递系数,,Ce 为电动势系数;K2为转矩传递函数,,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,,G 为转子重量,D 为转子直径。
基于MATLAB的BLDC系统模型的建立在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,这种方法实质上是一种整体分析法,因而这一模型基础上修改控制算法或添加、删除闭环就显得很不方便;为了克服这一不足,提出在Matlab/Simulink中构造独立的功能模块,通过模块组合进行BLDC建模,这一方法可观性好,在原有建模的基础上添加、删除闭环或改变控制策略都十分便捷,但该方法采用快速傅立叶变换(FFT)方法求取反电动势,使得仿真速度受限制。
电机数学模型以二相导通星形三相六状态为例,分析 BLDC 的数学模型及电磁转矩等特性。
为了便于分析,假定:a) 三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b) 忽略齿槽、换相过程和电枢反应等的影响; c) 电枢绕组在定子内表面均匀连续分布;d) 磁路不饱和,不计涡流和磁滞损耗。
则三相绕组的电压平衡方程可表示为:式中:-,「:■「:为定子相绕组电压(V); L L I 为定子相绕组电流(A); -三:为定子相绕组电动势(V); L 为每相绕组的自感(H) ; M 为每相绕组间的 互感(H); p 为微分算子p=d/dt 。
三相绕组为星形连接,且没有中线,则有得到最终电压方程:图•无刷直流电机的等效电路无刷直流电机的电磁转矩方程与普通直流电动机相似, 其电磁转矩大小与磁 通和电流幅值成正比(1)L-M 0 0'r 0d r 0 .5 0 r.L - MT 电=十细⑸所以控制逆变器输出方波电流的幅值即可以控制 BLDC 电机的转矩。
为产 生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期 内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120° 电角度,两者应严格同步。
由于在任何时刻,定子只有两相导通,贝U :电磁功率可表示为:二.二 (6)电磁转矩又可表示为:-:二……(7)无刷直流电机的运动方程为:T e -T L -Bto = J^= JPo>其中〔为电磁转矩;幷为负载转矩;B 为阻尼系数;•••为电机机械转速;J 为电机的转动惯量。
传递函数:无刷直流电机的运行特性和传统直流电机基本相同, 其动态结构图可以采用直流 电机通用的动态结构图,如图所示:由无刷直流电机动态结构图可求得其传递函数为= K1 UW ——T L1 + T 狙丫 V '1+T^ L(8)图2.无刷直流电机动态结构图式中:K i为电动势传递系数,•• - — , Ce为电动势系数;K2为转矩传递函数,:- ,R为电动机内阻,Ct为转矩系数;T m为电机时间常数,」7—, G为转子重量,D为转子直径。
基于MATLAB的BLDC系统模型的建立在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,这种方法实质上是一种整体分析法,因而这一模型基础上修改控制算法或添加、删除闭环就显得很不方便;为了克服这一不足,提出在Matlab/Simulink中构造独立的功能模块,通过模块组合进行BLDC建模,这一方法可观性好,在原有建模的基础上添加、删除闭环或改变控制策略都十分便捷,但该方法采用快速傅立叶变换(FFT)方法求取反电动势,使得仿真速度受限制。
本文提出了一种新型的BLDC建模方法,将控制单元模块化,在Matlab/Simulink建立独立的功能模块:BLDC本体模块、电流滞环控制模块、速度控制模块、参考电流模块、转矩计算模块和电压逆变模块,对这些功能模块进行有机整合,即可搭建出无刷直流电机系统的仿真模型。
在建模过程中,梯形波反电动势的求取方法一直是较难解决的问题[27,28],本文采用分段线性法成功地化解了这一难点,克服了建模方法存在的不足。
Matlab6.5针对电气传动控制领域所设计的工具箱SimPowerSystemToolbox2.3已提供了PMSM的电机模型,但没有给出BLDC的电机模型。
因此,本文在分析无刷直流电机数学模型的基础上,借助于Matlab强大的仿真建模能力,在Matlab/Simulink中建立了BLDC控制系统的仿真模型。
BLDC建模仿真系统采用双闭环控制方案:下即为BLDC建模的整体控制框图,其中主要包括:BLDC本体模块、电流滞环控制模块、速度控制模块、参考电流模块、转矩计算模块和电压逆变模块。
BLDC本体结构(1)BLDCM本体模块ec在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDC电压方程式(4)求取BLDC三相相电流,结构框图如图所示在整个控制系统的仿真模型中,BLDC 本体模块是最重要的部分,该模块根据BLDC 电压方程式(2-4)求取BLDC 三相相电流,而要获得三相相电流信号ia,ib,ic,必需首先求得三相反电动势信号ea, eb, ec控制框图如图2-11所示。
而BLDC 建模过程中,梯形波反电动势的求取方法一直是较难解决的问题,反电动势波形不理想会造成转矩脉动增大、相电流波形不理想等问题, 严重时会导致换相失败, 电机失控。
因此,获得理想的反电动势波形是BLDC 仿真建模的关键问题之一。
本文采用了分段线性法,如图2-12所示,将一个运行周期0°〜360。
分为6个阶段,每60°为一个换相阶段,每一相的每一个运行阶段都可用一段直线进行表示,根据某一时刻的转子位置和转速信号,确定该时刻各相所处的运行状态, 通过直线方程即可求得反电动势波形。
分段线性法简单易行, 且精度较高, 能够较好的满足建模仿真的设计要求。
因而,本文采用分段线性法建立梯形波反电动势波形。
图.BLDCM 本体模块结构框图及其封装形式pd理想情况下,二相导通星形三相六状态的BLDC 定子三相反电动势的波形如图2-12所示。
图中,根据转子位置将运行周期分为6个阶段:0〜n /3 n /〜2n /3 2n /〜n, n 〜4n /3 4 n /〜5n /3 5 n /〜2n以第一阶段0〜n /3为例,A相反电动势处于正向最大值Em,B 相反电动势处于负向最大值-Em,C 相反电动势处于换相阶段,由正的最大值Em沿斜线规律变化到负的最大值-Em。
根据转子位置和转速信号,就可以求出各相反电动势变化轨迹的直线方程,其它5个阶段,也是如此。
据此规律,可以推得转子位置和反电动势之间的线性关系,如表2-1 所示,从而采用分段线性法,解决了在BLDC 本体模块中梯形波反电动势的求取问题。
图.三相反电动势波形表中:K为反电动势系数(V/(r/min),pos为角度信号,w为转速信号,转数per=fix(pos/(2*pi))*2*pi , fix 函数是实现取整功能。
根据上式,用M文件编写反电势系数的S函数如下:反电动势S函数(emf.m)%=========================================================%BLDC模型中反电动势函数%========================================================= function [sys,x0,str,ts]=emf(t,x,u,flag)switch flag case 0, %初始化设置[sys,x0,str,ts]=mdlInitializeSizes; case 3, %输出量计算sys =mdlOutputs(t,x,u);case {1,2,4,9} %未定义标志sys = [];otherwise %错误处理error([ 'unhandled flag = ' ,num2str(flag)]);end %========================================================= %mdlInitializeSizes 进行初始化,设置系统变量的大小%========================================================= function [sys,x0,str,ts]=mdlInitializeSizes() sizes = simsizes; %取系统默认设置sizes.NumContStates = 0; sizes.NumDiscStates = 0; sizes.NumOutputs = 3;sizes.NumInputs = 2;sizes.DirFeedthrough = 1; sizes.NumSampleTimes = 1; sys = simsizes(sizes);x0 = []; str = []; ts = [-10]; %========================================================= %mdlOutputs 计算系统输出%========================================================= function sys=mdlOutputs(t,x,u) global k; global Pos; global w; k=0.060;% V/(r/min) 反电动势系数w=u(1); % 转速(rad/s)Pos=u(2); % 角度(rad)if Pos>=0 & Pos<=pi/3 sys=[k*w,-k*w,k*w*((-Pos)/(pi/6)+1)]; elseif Pos>=pi/3 & Pos<=2*pi/3sys=[k*w,k*w*((Pos-pi/3)/(pi/6)-1),-k*w]; elseif Pos>=2*pi/3 & Pos<=pi sys=[k*w*((2*pi/3-Pos)/(pi/6)+1),k*w,-k*w]; elseif Pos>=pi & Pos<=4*pi/3sys=[-k*w,k*w,k*w*((Pos-pi)/(pi/6)-1)];elseif Pos>=4*pi/3 & Pos<=5*pi/3sys=[-k*w,k*w*((4*pi/3-Pos)/(pi/6)+1),k*w];else Pos>=5*pi/3 & Pos<=2*pi sys=[k*w*((Pos-5*pi/3)/(pi/6)-1),-k*w,k*w];end转矩计算模块根据BLDC数学模型中的电磁转矩方程式,可以建立图5.7所示的转矩计算模块, 模块输入为三相相电流与三相反电动势,通过加、乘模块即可求得电磁转矩信号Te。
转矩计算模块结构框图及其封装形式转速计算模块根据运动方程式(2.4),由电磁转矩、负载转矩以及摩擦转矩,通过加乘、积分环节即可得到转速信号,求得的转速信号经过积分就可得到电机转角信号,如图Te转速计算模块结构框图及其封装形式电流滞环控制模块在这个仿真模块中采用滞环控制原理来实现电流的调节,使得实际电流随跟定电流的变化。
模块结构框图如图5.10所示[40],输入为三相参考电流和三相实际电流,输出为PWM逆变器控制信号。