船舶动力定位系统的数学模型
- 格式:pdf
- 大小:216.38 KB
- 文档页数:3
船舶动力定位系统数学模型参数辨识方法研究李文华;杜佳璐;张银东;宋健;孙玉清;陈海泉【摘要】船舶动力定位是深海开发的关键技术之一,随着海上油气生产向深海的发展,对应用于船舶动力定位系统的船舶数学建模也提出更高的要求.首先介绍船舶动力定位系统的意义及其应用的数学模型,然后针对船舶及推进器动力学数学模型的辨识与建立过程进行详细介绍,最后讨论船舶外界环境扰动建模的策略.【期刊名称】《船舶》【年(卷),期】2012(023)003【总页数】5页(P55-59)【关键词】船舶;动力定位系统;数学模型;辨识;环境扰动【作者】李文华;杜佳璐;张银东;宋健;孙玉清;陈海泉【作者单位】大连海事大学轮机工程学院大连116026;大连海事大学信息科学技术学院大连116026;大连海事大学轮机工程学院大连116026;大连海事大学轮机工程学院大连116026;大连海事大学轮机工程学院大连116026;大连海事大学轮机工程学院大连116026【正文语种】中文【中图分类】U661.33船舶动力定位技术是指在不借助锚泊系统的情况下,使船舶利用自身的推进装置抵御风、浪、流等外界扰动的影响,以一定的姿态保持在海面某目标位置或精确地跟踪某一给定轨迹,以完成各种作业功能[1]。
它具有定位成本不随着水深增加而增加,机动性强,操作简便,定位精度高,不破坏海床等优点,故被广泛应用于海洋石油钻井平台以及打捞救助船、工程供应船、消防船等各种船舶上,是维持海洋浮式作业平台和船舶正常工作的关键。
近年来,随着海洋开发不断向着远海、深海扩展,动力定位技术对海洋开发具有越来越重要的现实意义,已受到业界广泛关注[2-3]。
为了提高动力定位船舶的操纵性能与定位精度,必须建立一个尽量精确而全面的数学模型。
应用于动力定位系统的船舶数学模型可以分为船舶及推进器动力学数学模型、船舶外界环境干扰因素环境扰动模型两个部分。
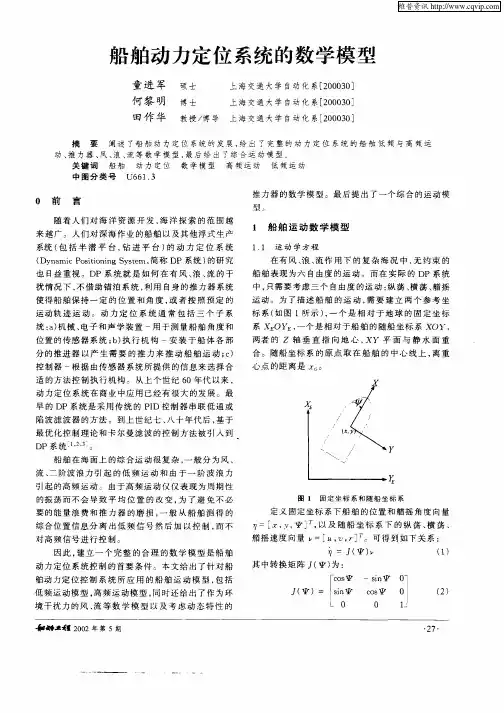
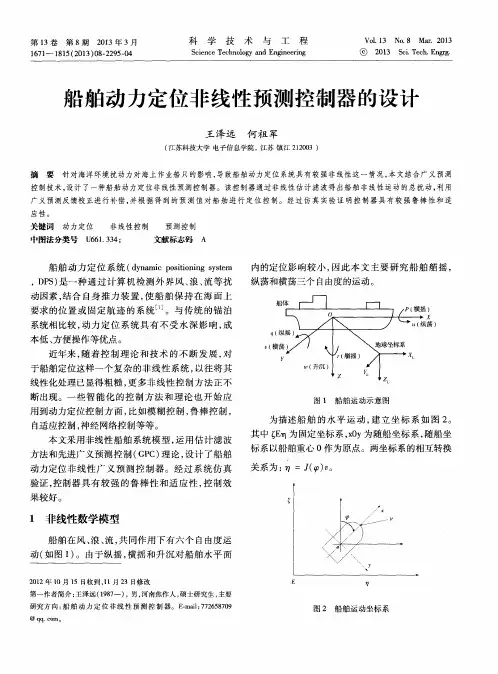
在有风、浪、流共同作用的复杂海况下,无约束的船舶具有六个自由度的运动特征。
编程语言计算船舶nomoto模型船舶的Nomoto模型是一种经典的数学模型,用于描述船舶的运动特性。
它通常由三个一阶微分方程组成,分别描述船舶在横向、纵向和转向方向上的运动。
编程语言可以用来模拟和计算这个模型,以便分析船舶在不同条件下的运动行为。
在编程语言中计算船舶的Nomoto模型时,可以采用数值积分的方法来求解微分方程。
常见的编程语言如Python、Matlab、C++等都可以用来实现这个模型。
下面我将从不同角度介绍如何使用Python来计算船舶的Nomoto模型。
首先,我们需要建立三个一阶微分方程,分别描述船舶在横向、纵向和转向方向上的运动。
然后,我们可以利用Python中的数值积分库,比如scipy中的odeint函数,来对这个微分方程组进行数值求解。
通过给定船舶的初始状态和外部环境条件,我们可以得到船舶在不同时间下的位置、速度和姿态等信息。
另外,我们也可以利用Python中的数据可视化库,比如matplotlib,来对模拟结果进行可视化展示。
这样可以更直观地观察船舶在不同条件下的运动特性,比如横摇、纵摇、航向变化等。
除了Python,其他编程语言也可以实现类似的计算。
比如在Matlab中,可以使用ode45函数来进行数值积分求解微分方程。
在C++中,可以利用数值积分库,比如GSL,来实现类似的计算过程。
总之,通过编程语言可以很方便地计算船舶的Nomoto模型,从而帮助工程师和研究人员分析船舶的运动特性,优化船舶设计和控制方案。
希望这个回答能够从多个角度全面地介绍了如何使用编程语言计算船舶的Nomoto模型。
动力定位系统介绍1、动力定位系统的产生和发展动力定位系统于上世纪70年代后期由美国海军研制成功,起初主要应用于潜水艇支持船、军用海底电缆铺设等作业。
从上世纪80年代初开始,随着北海油田、墨西哥湾油田的大规模开发,动力定位系统被广泛应用于油田守护、平台避碰、水下工程施工、海底管线检修、水下机器人(ROV)跟踪等作业。
尤其是90年代以来,随着海上勘探开发逐步向深水(500m~1500m)和超深水(1500m以上)发展,几乎所有的深水钻井船、油田守护船都装备了动力定位系统。
据初步估计,目前全世界装备动力定位系统的各类船只已超过1 000艘。
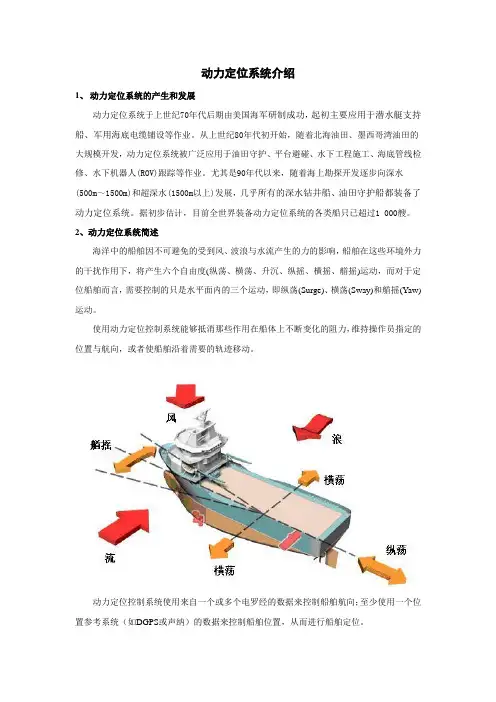
2、动力定位系统简述海洋中的船舶因不可避免的受到风、波浪与水流产生的力的影响,船舶在这些环境外力的干扰作用下,将产生六个自由度(纵荡、横荡、升沉、纵摇、横摇、艏摇)运动,而对于定位船舶而言,需要控制的只是水平面内的三个运动,即纵荡(Surge)、横荡(Sway)和艏摇(Yaw)运动。
使用动力定位控制系统能够抵消那些作用在船体上不断变化的阻力,维持操作员指定的位置与航向,或者使船舶沿着需要的轨迹移动。
动力定位控制系统使用来自一个或多个电罗经的数据来控制船舶航向;至少使用一个位置参考系统(如DGPS或声纳)的数据来控制船舶位置,从而进行船舶定位。
风传感可以测量船舶受到的风阻力的大小和方向,但是海流力和波浪力不是测量出来的,而是由船舶数学模型计算得出。
动力定位中的船舶数学模型是由扩展卡尔曼滤波算法建立的,该算法用于估计船舶航向、位置以及在各个方向运动的自由度:纵荡,横荡与艏摇,它合并了估计海洋水流与波浪影响的算法。
但是该数学模型是无法100%准确代表真正的船舶,因此根据位置参考系与传感器的测量值来不断修正该船舶数学模型,这是一个闭环控制过程。
下图是动力定位系统的控制原理图:动力定位系统可以检测与显示船舶的实际航向和位置与期望的航向和位置之间发生偏离的情况,控制器基于这些信息来控制船舶。
现代船舶动力定位系统的建模研究引言:船舶动力定位系统是一种利用现代技术实现船舶精确定位和自主航行的系统。
它通过多种传感器和设备,结合先进的算法和模型,实现对船舶位置、速度和航向等信息的准确监测和控制。
本文将从船舶动力定位系统的建模角度出发,探讨其研究现状和未来发展方向。
一、船舶动力定位系统的模型构建船舶动力定位系统的建模过程主要包括以下几个方面:船舶动力学模型、环境模型、传感器模型和控制算法模型。
1. 船舶动力学模型船舶动力学模型用于描述船舶在不同工况下的运动特性。
它考虑了船舶的质量、惯性、阻力和推进力等因素,以及外部环境的影响。
通过建立动力学方程,可以模拟船舶的运动过程,为船舶动力定位系统提供基础数据。
2. 环境模型环境模型用于描述船舶周围的海洋环境特征,包括海流、海浪、海况等。
通过收集并处理相关数据,可以建立环境模型,为船舶动力定位系统提供准确的环境信息,以便进行精确的定位和导航。
3. 传感器模型传感器模型用于描述船舶动力定位系统中使用的传感器的性能和特点。
不同类型的传感器可以提供不同的信息,如GPS可以提供位置信息,惯性导航系统可以提供姿态信息。
通过建立传感器模型,可以对传感器的测量误差和精度进行评估,从而提高定位系统的精度和可靠性。
4. 控制算法模型控制算法模型用于描述船舶动力定位系统中的控制策略和算法。
它通过对船舶动力学模型和环境模型进行分析和处理,实现对船舶运动的控制和调整。
通过选择合适的控制算法,可以提高船舶的定位精度和稳定性。
二、船舶动力定位系统的研究现状船舶动力定位系统的研究主要集中在以下几个方面:传感器融合技术、自适应控制算法、多智能体协同定位等。
1. 传感器融合技术传感器融合技术是指将多种传感器的测量数据进行融合,以提高定位系统的精度和可靠性。
常用的传感器包括GPS、惯性导航系统、声纳等。
通过融合这些传感器的数据,可以克服单一传感器存在的局限性,提高船舶的定位精度和鲁棒性。
船舶动力定位技术简述船舶动力定位技术简介动力定位技术背景随着船舶作业任务的复杂化,动力定位技术逐渐成为船舶自动化控制领域的研究热点。
目前,国际上主要的动力定位系统制造商有___、___、___等。
动力定位控制系统测量系统是指动力定位系统的位置参考系统和传感器。
位置参考系统主要采用DGPS,水声位置参考系统主要选择超短基线或长基线声呐,微波位置参考系统可选择Artemis Mk 4,张紧索位置参考系统可选择LTW Mk,激光位置参考系统可选择Fanbeam Mk 4,雷达位置参考系统可选择RADius 500X。
罗经、风传感器、运动参考单元等同样选择各专业生产厂家的产品。
控制技术动力定位系统的第一代产品采用经典控制理论来设计控制器,通常采用常规的PID控制规律。
第二代动力定位控制方法是以现代控制理论为基础的控制技术-最优控制和卡尔曼滤波理论相结合。
近年来出现的第三代动力定位系统采用了智能控制理论和方法,使动力定位控制进一步向智能化的方向发展。
智能控制方法主要体现在鲁棒控制、模糊控制、非线性模型预测控制等方面。
2001年5月份,挪威的___推出了一项新产品—绿色动力定位系统(Green DP),将非线性模型预测控制技术成功地引入到动力定位系统中。
Green DP控制器由环境补偿器和模型预测控制器组成。
环境补偿器的设计是为了提供一个缓慢变化的推力指令来补偿一般的环境作用力。
模型预测控制器是通过不断求解一个精确的船舶非线性动态数学模型,用以预测船舶的预期行为。
模型预测控制算法的计算比一般用于动力定位传统的控制器设计更加复杂且更为耗时,主要有三个步骤:1.从非线性船舶模型预测运动;2.寻找阶跃响应曲线;3.求解最佳推力。
控制器结构如图所示:在20世纪80年代初期,荷兰的Marin确定了推进器和动力定位的研究计划,并进行了动力定位的模型实验。
这些实验包括推进器和推进器之间的相互作用、推进器和船体之间的相互作用以及环境力和船舶的低频运动等内容。
船舶动力定位系统及其控制技术随着海洋经济时代的到来,人们对海洋资源的需求越来越多。
由于深海环境复杂多变,因而对获取海洋资源的装置定位精度要求也越来越高。
传统的锚泊系统有抛起锚操作过程繁琐、定位精度和机动性差等缺陷,难以符合定位精度的要求;而船舶动力定位系统(以下简称“DP系统”)则在保持航迹或保持位置方面具有突出的优势,已被逐渐应用到海上航行船舶和作业平台上,快速发展的控制理论在DP系统中的应用,取得了很好效果。
1 DP系统概述1.1 定义DP系统是指不依靠外界的辅助,通过固有的动力装置来对船舶或作业平台进行定位的一种闭环控制系统,系统包括控制系统、测量系统和推进系统,控制系统是其核心。
1.2 组成DP系统由控制系统、测量系统和推力系统组成。
控制系统是整个系统的核心,对测得的信息和外界干扰信号进行处理,能够通过计算推算出抵抗外界干扰的推力,并传递给推力系统。
测量系统能够获得船舶運动所需要的信息,其种类有DGPS、电罗经、张紧索系统、水下声呐系统、垂直参考系统、风力传感器等。
推力系统根据控制系统计算出的推力来控制船舶。
1.3 研究状况第1代DP系统的研发始于1960年。
钻井船“Eureka”号是世界上第一艘基于自动控制原理设计的DP船舶。
该船配备的DP模拟系统与外界张紧索系统相连。
该船除装有主推力系统外,在还在船首和船尾装有侧推力系统,在船身底部也安装有多台推进器。
第2代DP系统始于1970年,具有代表性的是“*****5”号船,该船安装有多台推进器,系统的控制器采用kalman滤波等现代控制技术,且控制系统中的元件有冗余,其安全性、稳定性和作业时间均有了较大的改善和提高。
第3代DP系统始于1980年。
系统采用微机处理技术和Muti-bus、Vme等多总线标准的控制系统。
代表性的第3代DP系统有挪威Konsberg公司的AD-P100、AD-P503系列产品和法国的DPS800系列产品。
我国对DP系统的研究开展得较晚,研究力量集中在高校和科研院所。
开题报告-船舶动力定位控制技术研究开题报告电气工程及自动化船舶动力定位控制技术研究一、综述本课题国内外研究动态,说明选题的依据和意义船舶在海上运行时会遇到风、海浪和海流等海洋环境的干扰,这样船舶就产生了受扰运动。
例如科学考察船在海上进行作业时,需要停在指定的位置上。
但是由于海上环境的影响,考察船不能一直停在指定的位置上。
因此为了确保船舶在海上运作的稳定性,需要对船舶进行定位。
以往,传统的定位方法是锚泊定位。
传统的抛锚定位是将锚扔入海底,利用锚钩住海底的淤泥,从而使船舶抵抗受到的外界的干扰力。
抛锚定位它的优点是,锚是任何船舶上都会备有的定位设备,从而不用另外加装其他的定位设备。
但是这种定位系统有不可避免的缺陷:1、定位不够准确,其精确性与水深成反比;2、抛锚、起锚费时比较麻烦,机动性能差。
一旦抛锚,如果需要重新定位时,需要收锚然后重新抛锚定位,这一过程本身就很繁琐和费时。
3、锚泊系统很容易受海底情况及水深的影响和限制,在一般情况下,它的有效定位的范围是在水深100米左右的区域。
4、对于一些需要在深海作业或者航行的船舶,随着水深的增加,锚泊系统的抓底力会逐渐减小,抛锚的困难程度也会增加,同时还要增加锚链的长度和加强强度,从而导致锚链的重量一下增大,使海上的布链作业将变得复杂。
此外,锚链的价格和安装费用也会猛烈增加。
在实际情况下,当水深达到一定的深度时,多点锚泊系统已经没有多大的用处。
而船舶动力定位系统与传统的定位不同,它不需要借助锚泊系统定位,而是通过测量系统检测出船舶的实际位置与所需要的目标位置的偏差,然后再根据外部环境扰动力的影响来计算出使船舶恢复到目标位置时需要的推力大小,再通过控制船舶上的推力器进行推理分配,从而使推力器产生相对应的推力,尽可能地使船保持在要求的位置上。
动力定位系统的特点是不受海水深度的影响,推力器能在任何水深下提供推力抵抗环境力,动力定位系统的定位成本不会随着水深的增加而增加,同时它具有定位迅速准确,快速响应天气环境的变化和不受海洋环境的影响等优点。