第5章 DC/DC变换器的动态模型与控制
- 格式:pptx
- 大小:1.25 MB
- 文档页数:62


文章编号:DC-DC变换基本电路和控制方法综述作者(江南大学物联网工程学院,江苏省无锡市 214122)摘要:近20年来,随着科学技术日新月异的发展,特别是功率开关器件的发展,DC-DC变换的拓扑结构和控制技术取得了很大的成就。
本文主要是对当前DC-DC变换电路——隔离型和非隔离型、两端口和多端口、单向变换和双向变换和控制方法——软开关、移相PWM、同步整流、多电平技术的发展与现状进行综述,并讨论了DC-DC变换器未来发展趋势。
关键词:基本电路;控制方法;隔离型;双向;同步整流中图分类号:文献标识码:1引言DC-DC变换器是将不可调的直流电压转变为可调或固定的直流电压,是一个用开关调节方式控制电能的变换电路,这种技术被广泛应用于各种开关电源、直流调速、燃料电池、太阳能供电和分布式电源系统中。
上个世纪,随着功率开关器件的发展,变换器拓扑和变换技术已经取得了很大的成就,并且已经发展到一个相当高的水平。
在DC-DC变换器演化过程中,离不开各种直流变换技术,各种新技术的产生和发展很大程度上影响了变换器拓扑的演化。
高功率密度、高效率、高性能、高可靠性以及低成本、小体积是DC-DC变换器的发展方向,各种变换技术也都围绕着提高变换器性能而相继被提出。
本文围绕着DC-DC变换的基本电路——隔离型和非隔离型、单端口和多端口、单向变换和双向变换以及控制方法——软开关、同步整流、移相PWM技术、多电平技术的发展和现状进行综述,并展望直流变换器未来的发展趋势。
2隔离型和非隔离型主要电路2.1非隔离型主要电路DC-DC非隔离型主要电路包括BUCK、BOOST、BUCK-BOOST、CUK等电路。
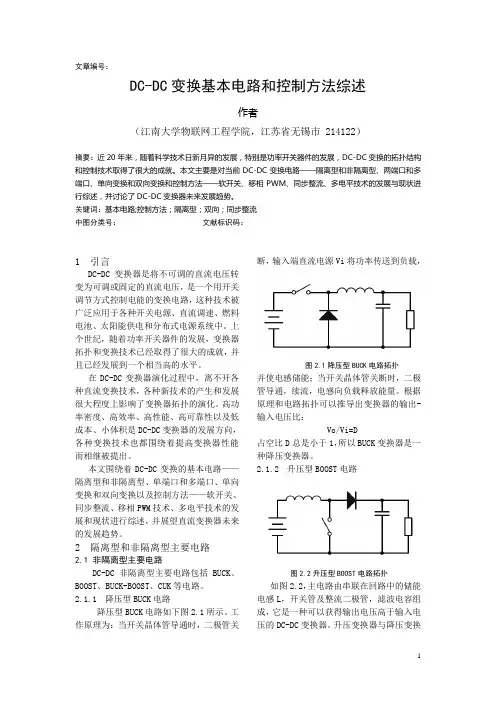
2.1.1降压型BUCK电路降压型BUCK电路如下图2.1所示。
工作原理为:当开关晶体管导通时,二极管关断,输入端直流电源Vi将功率传送到负载,图2.1降压型BUCK电路拓扑并使电感储能;当开关晶体管关断时,二极管导通,续流,电感向负载释放能量。

DC―DC开关变换器的建模与非线性行为控制一、Buck-Boost变换器工作原理Buck-Boost变换器电路如图1(a)所示。
Buck-Boost变换器功率级工作原理:当功率开关管S导通时,二极管D受反向电压关断,电感电流>上升。
当上升达到参考电流I时,S断开,>通过D进行续流,此时D导通。
如果在下一个时钟脉冲到来时大于0,则电路工作于连续导电模式(CCM),电路波形图1(b)所示;如果在下一个时钟脉冲到来前已降到0,则电路工作于不连续导电模式(DCM),此时开关S和D都关断,电路波形图1(c)所示。
控制级工作原理:将电感电流的采样值与参考电流I输入比较放大器A(其放大系数为K),得到误差信号e=(I-),该误差信号与锯齿波信号相比较,控制输出信号调节占空比D,进而控制开关S的导通时。
二、Buck-Boost变换器非线性行为在进行Buck-Boost变换器非线性行为分析前,做如下假设:(1)负载上的电压V恒定不变,可看作是一个电压源。
在实际电路中只要滤波电容足够大,这一假设是成立的;(2)变换器中所有器件均为理想器件,忽略其寄生参数。
1、连续导电模式在t=t(n=0,1,2,…)时刻,S闭合。
此时系统的微分方程为:(1)在t=t+DT(n=0,1,2,…)(D为系统的占空比)时刻,S 断开,此时系统的微分方程为:(2)当电感电流达到参考电流值时,电路开关S由导通转换为关断。
电感电流在时刻的采样值与基准电流I输入比较器A,A的反馈倍数为K,系统的采样控制方程为:(3)en输入PWM控制器,与锯齿波相比较,形成的占空比规律如下:(4)采用A开关映射的数据采样方法,即在开关S闭合的时刻采样数据。
设在t=tn(n=0,1,2…)和t=tn+T (n=0,1,2…)时刻电感电流采样值分别为in,in+1,则系统的离散方程为:(5)将式(3)和式(4)代入式(5),得:(6)其中:式(6)即为系统CCM的离散迭代方程。
混合动力汽车双向DC/DC变换器建模与控制双向DC/DC变换器是混合动力汽车中的关键技术之一,它主要的功能是使得电动机和储能元件之间的能量双向流动,实现汽车在行驶过程中对能量的回收。
首先分析了混合动力汽车双向DC/DC变换器的作用及其基本工作原理,然后,在不同工作模式下,通过分析确立了相应的控制目标,并分别建立了不同工作模式下的数学模型,进行双向DC/DC变换器控制器的研究与设计,最后,对提出的控制方案,通过仿真进行验证。
标签:双向DC/DC变换器混合动力汽车控制0 引言本文选择混合动力汽车中常用的双向Buck/Boost变换器作为研究对象,分析了其拓扑结构和工作原理,阐述了双向Buck/Boost变换器的数学建模及控制器的设计,重点分析了其启动模式、驱动/再生制动模式、充电模式的数学建模及控制器的设计。
最后对不同模式下的双向Buck/Boost变换器控制器的设计进行仿真验证。
1 双向Buck/Boost变换器的拓扑结构和工作原理1.1 拓扑结构图1表示了双向Buck/Boost变换器的拓扑结构。
输入侧为动力电池,输出侧用来驱动电机,当工作在Boost模式时,动力电池向负载提供能量;当工作在Buck模式时,负载向动力电池提供能量,从而实现能量的双向流动。
1.2 工作原理混合动力汽车的运行模式主要可以分为四种,启动模式,驱动模式,再生制动模式和充电模式。
当混合动力汽车启动瞬间,内燃机不工作,动力电池放电来启动汽车,此时,双向Buck/Boost电路的负载是启动电阻R;当混合动力汽车处于加速爬坡或重载的情况时,工作于驱动模式,动力电池经过双向Buck/Boost电路输出能量,驱动内燃机工作;当混合动力汽车处于减速制动的情况时,属于再生制动模式,此时能量经过Buck/Boost电路被动力电池回收;当混合动力汽车的电池能量不足,需要充电时,将工作于充电模式,负载经过Buck/Boost电路向动力电池充电。