液压挖掘机的三种流量控制方式
- 格式:doc
- 大小:9.98 MB
- 文档页数:46
液压阀的流量控制方法液压阀是液压系统中的重要元件,用于控制液体的流动和流量。
在液压系统中,流量的控制对于实现系统的稳定和精确控制是至关重要的。
本文将介绍液压阀的流量控制方法,以及如何选择和使用适合的液压阀来实现所需的流量控制。
一、液压阀的流量控制原理液压阀的流量控制原理主要是通过改变液体的流动阻力来实现的。
当液体流过液压阀时,阀口的大小和形状会改变液体的流动阻力,从而改变液体的流量。
通过调节阀口的大小和形状,可以实现对液体的流量进行精确控制。
二、液压阀的流量控制方法1.节流控制节流控制是液压阀流量控制中最常用的一种方法。
通过调节节流口的大小,可以改变液体的流量。
当节流口较小时,液体的流量也较小;当节流口较大时,液体的流量也较大。
节流控制具有结构简单、调节方便、可靠性强等优点,因此在液压系统中得到了广泛应用。
2.调速阀控制调速阀是一种特殊的节流阀,它通过内置的弹簧力来平衡阀芯两端的压差,从而实现对液体流量的精确控制。
调速阀具有稳定的流量特性,可以保证液体在稳定的流量下流动,因此常用于需要高精度流量控制的场合。
3.溢流阀控制溢流阀是一种安全保护元件,当系统压力过高时,溢流阀会自动打开,将多余的液体排回油箱,以防止系统压力过高对液压元件造成损坏。
同时,溢流阀也可以用作流量控制元件,通过调节溢流阀的开启压力,可以实现对液体流量的调节。
4.比例阀控制比例阀是一种可以按照输入信号的大小和方向,连续地控制液压系统中的压力和流量的元件。
比例阀具有调节方便、精度高、响应速度快等优点,因此在现代液压系统中得到了广泛应用。
通过调节比例阀的输入信号,可以实现对液压系统中液体流量的精确控制。
三、如何选择合适的液压阀实现流量控制在选择合适的液压阀实现流量控制时,需要考虑以下因素:1.所需流量的大小和调节范围;2.系统的工作压力和温度;3.液压油的粘度和清洁度;4.系统的安全保护需求;5.系统的成本和可靠性。
综上所述,液压阀的流量控制对于液压系统的稳定和精确控制至关重要。
挖掘机各种控制方式的比较(基础)1、正流量控制的问题在我们常见的挖掘机中,除了小松使用LS控制外,大部分都使用负流量控制。
近年来有部分的公司推出正流量控制,并且如此这般地说正流量有诸多好处,那么正流量真的有那么神吗?让我们在下边以川崎K3V系列为例来分析一下挖掘机上液压泵地控制原理:挖掘机上为了更有效地利用发动机的功率通常都采用恒功率变量泵,所谓的恒功率变量泵通俗一点说就是泵的压力与泵的流量的乘积是一个常数,如果这个数值大于发动机的功率时就会出现我们常说的憋车。
所以每个设计者就其设计思想来说,都必须是使整个液压系统的功率无限接近发动机的功率而又绝对不能大于发动机的功率。
挖掘机的恒功率控制:在挖掘机的恒功率控制上分为两个部分:一是泵内部的功率控制:他是根据本泵的输出压力和他泵(另一个泵)的输出压力对泵的排量进行的控制,当压力升高时,泵的排量随之减小;当压力降低时,泵的排量随之增大;如果系统的压力低于先导压力时则引入先导压力对其排量进行控制.无论是对于正流量还是负流量,就此一部分而言,不管是从理论上还是从结构上都没有什么不同,也就是说在此部分没有什么正流量和负流量之分.这是液压泵恒功率控制的主体,在此不作讨论.二是外部信号对泵的功率的控制:这里说的外部信号是指先导操作系统,主压力系统,发动机系统等等等等一切与泵的功率控制有关的信息的综合.在负流量中是负压信号和其它信号的综合,在正流量中是正压信号和其它信号的综合.这两个其它信号也没有什么不同,关键就在于负压信号和正压信号的区别. 我们知道,在挖掘机上,各执行元件的速度会随操作手柄的行程的变化而变化,液压系统会根据这种变化对其排量进行控制(正负控制的缺点),负流量和正流量的区别就在于这种变化的信号采集位置的不同.信号的压力值就会越小;反之如果手柄行程越小,对应的二次先导压力也会越小,由二次先导压力控制的主阀芯的开启度也会越小, 与之对应, 主阀芯的开启度越小,主油路分向执行元件的油越少,执行元件的速度就会越慢, 通过中位流经负压信号发生装置的油就越多,负压信号的压力值就会越大.液压泵根据负压信号的压力值的大小来对其排量进行控制.这就是负流量控制.他的信号采集点是主油路中主控制阀的出口处.正流量:在正流量的主控制阀上没有负压信号发生装置,他的信号采集于二次先导.其它部分与负流量没有什么区别.与负流量相比正流量为什么操作敏感性好:由于负压控制的信号采集点在主挖掘阀的出口处,只有主控制阀有动作时此负压信号才会发生变化,从而使泵的排量发生变化,这就使得液压泵的控制永远滞后于主控制阀的控制.而在正流量中,由于泵的控制信号采集于二次先导压力,此压力信号同时发送液压泵和主控制阀,这就是使的两者的动作可以同步进行.这就是“与负流量相比正流量操作敏感性好”的主要原因.与负流量相比正流量为什么节油:在负流量控制的液压系统中,负压信号的压力大约是5MPa到6MPa,此压力只用于产生负压信号;而正流量控制的液压系统中,由于没有此装置,他的回油压力仅仅是背压(一般在0.5MPa左右),这就减少了一个不必要的功率损失,从而使的正流量的挖掘机在完成同样工作量的情况下一定比负流量控制的挖掘机省油.正流量控制系统是力士乐上世纪80年代的技术,主要特点是:操纵手柄的先导压力不仅控制换向阀,还用来调节油泵的排量。
挖掘机常用系统-负流量系统介绍作者:Stonelet 2009-5-31挖掘机常用系统类型较多,从不同的角度可得出不同的名称。
如有定量系统、变量系统;恒功率控制、变功率控制;转速感应控制、压力感应控制;负流量控制、正流量控制、负荷敏感控制等。
很多初学者在刚刚接触到这些术语时,都会晕!挖掘机液压系统在工程机械中属复杂的那类,所以与其有关的技术也比较多;这是造成挖掘机液压系统专用名词多的一个重要原因。
但随着对挖掘机液压技术学习的深入,大家会发现其实各种技术主要是关于“发动机-液压泵-负载”这个能量传递链的;其中负流量控制、正流量控制、负荷敏感控制即是从“液压泵-负载”环节中两者匹配而产生的术语。
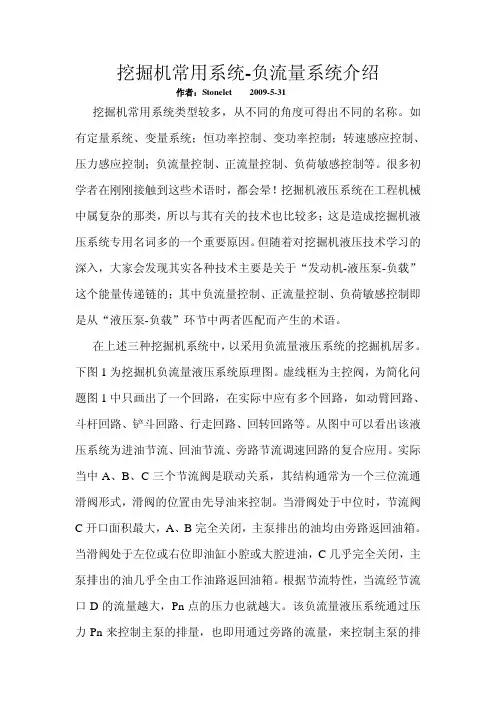
在上述三种挖掘机系统中,以采用负流量液压系统的挖掘机居多。
下图1为挖掘机负流量液压系统原理图。
虚线框为主控阀,为简化问题图1中只画出了一个回路,在实际中应有多个回路,如动臂回路、斗杆回路、铲斗回路、行走回路、回转回路等。
从图中可以看出该液压系统为进油节流、回油节流、旁路节流调速回路的复合应用。
实际当中A、B、C三个节流阀是联动关系,其结构通常为一个三位流通滑阀形式,滑阀的位置由先导油来控制。
当滑阀处于中位时,节流阀C开口面积最大,A、B完全关闭,主泵排出的油均由旁路返回油箱。
当滑阀处于左位或右位即油缸小腔或大腔进油,C几乎完全关闭,主泵排出的油几乎全由工作油路返回油箱。
根据节流特性,当流经节流口D的流量越大,Pn点的压力也就越大。
该负流量液压系统通过压力Pn来控制主泵的排量,也即用通过旁路的流量,来控制主泵的排量。
为了使得主泵排量与负载相适应,当Pn 增大时(即旁路流量增大),说明系统有许多的压力油从旁路卸载即出现了流量富余,故此时应该减少主泵的排量。
与此相反,当Pn 减小时说明系统出现了供油不足现象,此时应增加主泵的排量。
负流量液压系统即是基于以上思想而设计的。
从某种意义上来说,负流量系统也是一种负载感知系图 1 挖掘机负流量液压系统原理图图 2 挖掘机负流量系统实例。
挖掘机液压系统的流量控制方法研究随着机械化水平和工程技术的不断提升,挖掘机已经成为了现代建筑中不可或缺的重要工具之一。
而在挖掘机的各个功能模块中,液压系统扮演着至关重要的角色。
液压系统可以通过传递压力和流量,驱动各种液压执行机构完成工作。
挖掘机液压系统的流量控制方法是该系统运转过程中的重要问题,对于提高挖掘机的工作效率和便利程度都有着不可或缺的作用。
一、挖掘机液压系统流量的控制方法1. 手动控制方法:这种方法是最为简单的一种控制方法,通常在早期的挖掘机中被广泛应用。
手动控制方法通常是由操纵杆操作,通过调整液压泵的容积,来控制液压系统的流量。
这种方法随着技术的不断提高,逐渐被机械控制、电子控制和比例控制所替代。
2. 机械控制方法:这种方法是在手动控制方法基础上的一种升级版,它采用了机械传动装置,采用相对刚性的机械传动来控制液压系统流量。
这种方法的好处是结构比较简单,易于维修和更换,但是无法实现流量自适应和流量调节。
3. 电子控制方法:随着计算机技术和传感器技术的不断发展,电子控制方法逐渐被广泛应用。
电子控制方法通过传感器对流量和压力进行在线监测,然后通过计算机控制来实现液压系统流量的控制。
这种方法的好处是可以实现流量自适应和流量调节,但是相对于机械控制方法来说,电子控制方法的成本和维护难度都比较大。
4. 比例控制方法:比例控制方法又称为比例液压控制技术,是一种结合了机械传动和电子技术的先进液压控制方法。
比例控制方法利用比例电磁阀来控制节流元件的开度,从而实现流量的调节控制。
这种方法的优势在于既可以兼顾机械控制的稳定性和简单性,同时也可以实现电子控制的流量自适应和流量调节。
二、挖掘机液压系统的流量控制应用实例1. 挖掘机工作如果不能精确地控制油液流量,很难保证机械的工作效率和精度。
通过采用比例控制方法,可以精确地控制挖机的液压系统流量,从而保证机械的工作效率和精确度。
2. 在矿山和采石场等大型场景下,挖掘机的工作时间比较长,如果采用手动控制或者机械控制方法容易造成工人疲劳和系统失灵。

液压挖掘机的三种流量控制方式摘要:在液压挖掘机的负载适应控制策略中,负流量(Negative Flow Control)、正流量控制(Positive Flow Control)及负荷传感器控制(Load Sensing Control)三种流量控制方式的流行称谓,是按其泵控特性来分类的。
本文通过对多种厂牌型号挖掘机的比较分析,提出了旁通流量控制(By-pass Flow Control)、先导传感控制(Pilot Sensing Control)及负荷传感控制的分类。
这一分类方法,对于设计时比较不同控制系统的性能和维修时理解不同控制系统结构和功能的特点,都有所裨益。
1.流量控制在挖掘机的液压系统内,流量Q、压力P及能耗(流量损失ΔQ、压力损失ΔP)等参数的变化,反映了液压传动过程的控制特性。
液压系统工作时,压力P不是系统的固有参数,而是由外负荷决定的。
因此,当发动机转速n e一定时,要对液压系统的功率进行调节,其实是对液压缸、液压马达等执行元件的进油量Q a进行调节(参看图1)。
图1.流量调节如图2所示,有两种方法调节系统流量。
第一种方法是泵控方式,通过改变主泵的每转排量q来调节主泵的输出流量Q p,称为容积调速。
常见的容积调速方式包括:①利用主泵出口压力P P与主泵排量q的乘积保持不变的恒扭矩控制;②利用发动机转速传感(ESS)使主泵吸收的扭矩p P q与主泵转速n的乘积保持不变的恒功率控制;③在临近系统溢流压力时,减小主泵排量的压力切断控制;④配用破碎头等作业附件时,由外部指令限定主泵最大排量的最大流量二段控制;⑤双泵系统中,利用两泵出口压力的平均值与主泵流量乘积保持不变的交叉功率控制(相加控制或总功率控制);⑥多泵系统中,因主泵组的液压总功率大于发动机的输出功率,为防止发动机出现失速,采用了极限负荷控制。
除了容积调速,还有一种泵控方式是通过动力模式下的变功率控制,利用外部指令设定不同工况下不同的发动机输出功率来改变主泵转速n e,从而调节主泵输出流量Q=nq。
挖掘机的液压系统液压挖掘机的液压系统都是由一些基本回路和辅助回路组成,它们包括限压回路、卸荷回路、缓冲回路、节流调速和节流限速回路、行走限速回路、支腿顺序回路、支腿锁止回路和先导阀操纵回路等,由它们构成具有各种功能的液压系统。
一.液压挖掘机液压系统的基本类型液压挖掘机液压系统大致上有定量系统、变量系统和定量、变量复合系统等三种类型。
1.定量系统在液压挖掘机采用的定量系统中,其流量不变,即流量不随外载荷而变化,通常依靠节流来调节速度。
根据定量系统中油泵和回路的数量及组合形式,分为单泵单回路定量系统、双泵单回路定量系统、双泵双回路定量系统及多泵多回路定量系统等。
2.变量系统在液压挖掘机采用的变量系统中,是通过容积变量来实现无级调速的,其调速方式有三种:变量泵-定量马达调速、定量泵-变量马达调速和变量泵-变量马达调速。
单斗液压挖掘机的变量系统多采用变量泵-定量马达的组合方式实现无极变量,且都是双泵双回路。
根据两个回路的变量有无关连,分为功率变量系统和全功率变量系统两种。
其中的分功率变量系统的每个油泵各有一个功率调节机构,油泵的流量变化只受自身所在回路压力变化的影响,与另一回路的压力变化无关,即两个回路的油泵各自独立地进行恒功率调节变量,两个油泵各自拥有一半发动机输出功率;全功率变量系统中的两个油泵由一个总功率调节机构进行平衡调节,使两个油泵的摆角始终相同。
同步变量、流量相等。
决定流量变化的是系统的总压力,两个油泵的功率在变量范围内是不相同的。
其调节机构有机械联动式和液压联动式两种形式。
二.YW-100型单斗液压挖掘机液压系统国产YW-100型履带式单斗液压挖掘机的工作装置、行走机构、回转装置等均采用液压驱动,其液压系统如图1所示。
该挖掘机液压系统采用双泵双向回路定量系统,由两个独立的回路组成。
所用的油泵1为双联泵,分为A、B两泵。
八联多路换向阀分为两组,每组中的四联换向阀组为串联油路。
油泵A输的压力进入第一组多路换向阀,驱动回转马达、铲斗油缸、辅助油缸,并经中央回转接头驱动右行走马达7。
挖掘机三种液压系统,一个就在国内比较多见的负流量,还有一种就是被炒得很火的正流量,另外一种就是欧州最为常用的负荷传感。
正流量与负流量同是开中心,负荷传感为闭中心。
开中心典型为负流量,其价格相对底兼,至于正流量价格一定不低,其成功批量应用可以说是等于零!呵呵!开中心的代表为川崎,闭中心的代表为德国林德LSC(1978年就已经在Altas上应用,如果了解小松,你们就知道其Class的由来,这里不多做介绍),我要更正一点就是rexroth在中挖并没有历史,各位力士迷们希望别以为力士乐都行!哈哈!都知道螺纹插装阀不如SUN吧!径向柱塞不如合格龙吧!应用上有地区因素:因欧州人生活水平较高,他们对可操作要求高,所以具动作可预知性且与负载无关的LSC在欧州最为流行,但其价格比负流量高点!在亚洲地区劳动力便宜且劳动力充足,这就决定在中国的老板更偏向于采用需要比较丰富经验才能开好的动作与负载压力有关的负流量系统。
在能耗上看:负流量在阀中位时都有30L/min左右的流量进入油箱。
我这里只举一种功况:负载轻载移动时,进入油箱的流量为减少很少,但当负载增加到很大,这时进入油箱的流量会增大,然后泵排量减小,当进入油箱流量到达近30L后,负载可以说动作降到非常慢,这样系统压力应该在30MPa,大家算一下这会产生多少节流损失?在挖机这种工况时时发生!应该是一种典型工况!负流量也在一种跟正流量一样的情况,就是当手柄最大,泵近最大排量,可这里是一个很大负载,系统压力高,可是执行机构只需要一点流量,可是近全排量的泵注入!这样大部分油液将经过开中心阀溢流进入油箱!这样将是巨大的能量浪费!别以为正流量是需要多少供多少!在来谈谈林德LSC,哈哈!大家一定说LSC是什么东西了吧!有兴趣去找找Altas 和volvor的负载敏感系统轮挖,也许能给点印像给你!LSC的多路阀就是大家了解的阀后补尝阀,当Rexroth开发1.5回路时,人家已经是双回路了(这可不是定量系统的双回路)。
所谓正负流量控制,说的是泵的控制方式。
负流量控制是通过负载返作用于泵,控制泵的排量,从而实现有动作时流量大,无动作时流量小。
正流量控制是人为控制泵的排量,需要大流量时就控制着输出一个大流量,需要小流量就控制着输出一个小流量。
液压系统中所有的控制都是由阀执行的。
简单的来说正负流量控制是指变量泵通过压力控制得到所需流量,负流量控制就是随着液控压力提高,泵摆向较小的排量。
正流量控制就是随着液控压力提高,泵摆向较大的排量。
挖掘机上为了更有效地利用发动机的功率通常都采用恒功率变量泵,所谓的恒功率变量泵通俗一点说就是泵的压力与泵的流量的乘积是一个常数,如果这个数值大于发动机的功率时就会出现我们常说的憋车。
所以每个设计者就其设计思想来说,都必须是使整个液压系统的功率无限接近发动机的功率而又绝对不能大于发动机的功率。
挖掘机的恒功率控制在挖掘机的恒功率控制上分为两个部分:一是泵内部的功率控制:他是根据本泵的输出压力和他泵(另一个泵)的输出压力对泵的排量进行的控制,当压力升高时,泵的排量随之减小;当压力降低时,泵的排量随之增大;如果系统的压力低于先导压力时则引入先导压力对其排量进行控制.无论是对于正流量还是负流量, 就此一部分而言,不管是从理论上还是从结构上都没有什么不同,也就是说在此部分没有什么正流量和负流量之分.这是液压泵恒功率控制的主体,在此不作讨论. 二是外部信号对泵的功率的控制:这里说的外部信号是指先导操作系统,主压力系统,发动机系统等等等等一切与泵的功率控制有关的信息的综合.在负流量中是负压信号和其它信号的综合,在正流量中是正压信号和其它信号的综合.这两个其它信号也没有什么不同,关键就在于负压信号和正压信号的区别.我们知道,在挖掘机上,各执行元件的速度会随操作手柄的行程的变化而变化,液压系统会根据这种变化对其排量进行控制,负流量和正流量的区别就在于这种变化的信号采集位置的不同.什么是负流量控制系统?手柄行程越大,对应的二次先导压力也会越大,由二次先导压力控制的主阀芯的开启度也会越大, 与之对应, 主阀芯的开启度越大,主油路分向执行元件的油越多,执行元件的速度就会越快,通过中位流经负压信号发生装置的油越少,负压信号的压力值就会越小;反之如果手柄行程越小,对应的二次先导压力也会越小,由二次先导压力控制的主阀芯的开启度也会越小, 与之对应, 主阀芯的开启度越小,主油路分向执行元件的油越少,执行元件的速度就会越慢, 通过中位流经负压信号发生装置的油就越多,负压信号的压力值就会越大.液压泵根据负压信号的压力值的大小来对其排量进行控制.这就是负流量控制.他的信号采集点是主油路中主控制阀的出口处什么是正流量控制系统?正流量控制系统,是力士乐上世纪80年代的技术,主要特点是:操纵手柄的先导压力不仅控制换向阀,还用来调节油泵的排量。
正流量和负流量液压控制系统在我们常见的挖掘机中,除了小松使用LS控制外,大部分都使用负流量控制。
近年来有部分的公司推出正流量控制,并且如此这般地说正流量有诸多好处,那么正流量真的有那么神吗?挖掘机上为了更有效地利用发动机的功率通常都采用恒功率变量泵,所谓的恒功率变量泵通俗一点说就是泵的压力与泵的流量的乘积是一个常数,如果这个数值大于发动机的功率时就会出现我们常说的憋车。
所以每个设计者就其设计思想来说,都必须是使整个液压系统的功率无限接近发动机的功率而又绝对不能大于发动机的功率。
挖掘机的恒功率控制在挖掘机的恒功率控制上分为两个部分:一是泵内部的功率控制:他是根据本泵的输出压力和他泵(另一个泵)的输出压力对泵的排量进行的控制,当压力升高时,泵的排量随之减小;当压力降低时,泵的排量随之增大;如果系统的压力低于先导压力时则引入先导压力对其排量进行控制.无论是对于正流量还是负流量,就此一部分而言,不管是从理论上还是从结构上都没有什么不同,也就是说在此部分没有什么正流量和负流量之分.这是液压泵恒功率控制的主体,在此不作讨论.二是外部信号对泵的功率的控制:这里说的外部信号是指先导操作系统,主压力系统,发动机系统等等等等一切与泵的功率控制有关的信息的综合.在负流量中是负压信号和其它信号的综合,在正流量中是正压信号和其它信号的综合.这两个其它信号也没有什么不同,关键就在于负压信号和正压信号的区别.我们知道,在挖掘机上,各执行元件的速度会随操作手柄的行程的变化而变化,液压系统会根据这种变化对其排量进行控制,负流量和正流量的区别就在于这种变化的信号采集位置的不同.什么是负流量控制系统?手柄行程越大,对应的二次先导压力也会越大,由二次先导压力控制的主阀芯的开启度也会越大, 与之对应, 主阀芯的开启度越大,主油路分向执行元件的油越多,执行元件的速度就会越快,通过中位流经负压信号发生装置的油越少,负压信号的压力值就会越小;反之如果手柄行程越小,对应的二次先导压力也会越小,由二次先导压力控制的主阀芯的开启度也会越小, 与之对应, 主阀芯的开启度越小,主油路分向执行元件的油越少,执行元件的速度就会越慢, 通过中位流经负压信号发生装置的油就越多,负压信号的压力值就会越大.液压泵根据负压信号的压力值的大小来对其排量进行控制.这就是负流量控制.他的信号采集点是主油路中主控制阀的出口处什么是正流量控制系统?正流量控制系统,是力士乐上世纪80年代的技术,主要特点是:操纵手柄的先导压力不仅控制换向阀,还用来调节油泵的排量。
采矿技术2003 No.3350液压系统工作泵流量的电控调节谭俊材(中国铝业股份有限公司广西分公司,广西平果县531400)液压系统是依靠液压泵在发动机的带动下向系统输出高压油以实现能量传递的系统,所以比较容易获得大的机械力或扭矩。
通常,液压系统主要是通过压力补偿变量机构改变液压工作泵输出的流量,从而使发动机转速恒定在选择的位置上。
350液压挖掘机液压系统的压力补偿变量机构主要包括:恒功率调节及负载传感调节。
1 电液比例减压阀恒功率调节的主要元件是电液比例减压阀,简称PRV阀,它是一个电磁阀,与普通电磁阀不同的是控制线圈动作的是由电子控制器发出的脉冲信号。
1.1 电液比例减压阀的工作模式该阀的工作模式简化如图1。
图1 电液比例减压阀的工作模式电子控制器通过对所选择的动力模式、发动机转速挡位及发动机实际的转速等进行信号综合、分析,形成电信号作用到电液比例减压阀上,使滑阀移动,开通控制油道,先导油穿过此阀后,转变为PS信号。
上述3个变量中,有一个变量发生改变,都会导致PS信号的改变。
1.2 电液比例减压阀的工作特点卡特彼勒公司规定:在发动机实际转速比理论转速低250 rpm时,电液比例减压阀发出PS信号,改变斜盘的倾角,降低主泵的输出流量,防止发动机被迫熄火。
在驾驶室右护手前方,有一个旋钮,即为发动机转速选择旋钮。
它有十挡,各挡相对应的转速为900,1020,1160,1300,1470,1590,1700,1800,1900,1970rpm。
在动力模式I、Ⅱ时,脉宽比恒定,当发动机转速符合设定值时,该PRV阀不发出Ps信号。
电液比例减压阀的脉宽比越高,磁性越大,阀的开口就越小。
2 前、后工作泵流量的调节(1)手柄全行程扳动时,为恒功率控制。
此时泵的输出量决定于泵的压力。
有3种功率水平:即动力模式I、Ⅱ、Ⅲ。
在动力模式Ⅲ时,功率输出为100%;在动力模式Ⅱ时,功率输出为9o%;在动力模式I时,功率输出为70%。
挖掘机不同控制方式的比较------------------------------------------作者xxxx------------------------------------------日期xxxx挖掘机各种控制方式的比较(基础)1、正流量控制的问题在我们常见的挖掘机中,除了小松使用LS控制外,大部分都使用负流量控制。
近年来有部分的公司推出正流量控制,并且如此这般地说正流量有诸多好处,那么正流量真的有那么神吗?让我们在下边以川崎K3V系列为例来分析一下挖掘机上液压泵地控制原理: 挖掘机上为了更有效地利用发动机的功率通常都采用恒功率变量泵,所谓的恒功率变量泵通俗一点说就是泵的压力与泵的流量的乘积是一个常数,如果这个数值大于发动机的功率时就会出现我们常说的憋车。
所以每个设计者就其设计思想来说,都必须是使整个液压系统的功率无限接近发动机的功率而又绝对不能大于发动机的功率。
ﻫ挖掘机的恒功率控制:在挖掘机的恒功率控制上分为两个部分:一是泵内部的功率控制:他是根据本泵的输出压力和他泵(另一个泵)的输出压力对泵的排量进行的控制,当压力升高时,泵的排量随之减小;当压力降低时,泵的排量随之增大;如果系统的压力低于先导压力时则引入先导压力对其排量进行控制。
无论是对于正流量还是负流量,就此一部分而言,不管是从理论上还是从结构上都没有什么不同,也就是说在此部分没有什么正流量和负流量之分.这是液压泵恒功率控制的主体,在此不作讨论.二是外部信号对泵的功率的控制:这里说的外部信号是指先导操作系统,主压力系统,发动机系统等等等等一切与泵的功率控制有关的信息的综合.在负流量中是负压信号和其它信号的综合,在正流量中是正压信号和其它信号的综合。
这两个其它信号也没有什么不同,关键就在于负压信号和正压信号的区别。
ﻫ我们知道,在挖掘机上,各执行元件的速度会随操作手柄的行程的变化而变化,液压系统会根据这种变化对其排量进行控制(正负控制的缺点),负流量和正流量的区别就在于这种变化的信号采集位置的不同。
工程机械液压系统的控制方式引言工程机械在连续作业中,其作业负荷的变化比较大。
例如,推土机在作业时,作业负荷会从0变到无穷大,在这种情况下,发动机为了满足大负荷下的动力要求以及小负荷下的经济要求,就必须对其所输出的功率进行调整。
同时,工程机械在操作过程中,一般需要协同作业。
例如,在挖掘机进行装车作业时,动臂、斗杆、铲斗和回转需要协同作业,因而需要对工程机械的传动和控制系统做出调节,使其驱动部件的位置,满足速度需求。
此外,在工程机械工作中,机械被要求既能够进行大功率输出,也能够进行精细化动作。
比如,起重机在进行吊重时,要做到大功率输出,在吊装时,又要实现微动作。
综上所述,工程机械的传动和控制系统需要具有良好的动力性、经济性、和调速性。
1工程机械的液压传动与控制系统分析液压系统在获得能源时,需要将发动机输出的机械能在液压泵的作用下转化为液压能。
液压泵输出的能量,会受到液压阀的调节和分配。
系统的压力、流量和方向也会受到液压阀的调节和控制。
此外,液压阀还可以对功率支流的绝对值和相对值进行控制。
在机械能转化为液压能后,液压马达和液压缸又会把液压能转化为机械能,以达到操作机械工作的目的。
如果要实现对工程机械的动力、节能、和作业效率的控制,就需要通过调节液压泵的排量和发动机的转速以及控制阀的开度来实现。
2液压系统的功率控制方式分析压力和流量是液压系统的功率形式,液压功率用公示可以表示为:P0=pq/60,在式中,P0为液压功率;p为液压系统压力;q为液压系统流量。
液压系统工作时,负载的大小决定了其压力的大小,因此压力不是其液压系统固有的参数,压力是载荷的一种反应,而真正能够对液压系统功率起到控制的是液压系统的流量。
因此,下面分别从液压泵和液压阀的流量控制来进行分析。
液压泵流量公式:q0=V.n,式中q0为液压泵流量;n为液压泵输入转速;V为液压泵排量。
要改变机械的速度,就要改变其流量,而从公式中可以得知,流量的改变可以由改变液压泵的排量和转速来控制。
力士乐泵控制方式液压泵控制方式:
一,压力控制:恒压力、变压力、压力切断
二,流量控制:負流量、正流量、負載敏感
三,扭矩控制:恒扭矩、变扭矩、功率匹配
具体控制方式
1,恒压(DR)和变压控制
2,液控(负流量、正流量)和压力切断
3,负载敏感和压力切断
4,恒扭矩
5,恒扭矩和压力切断
6,恒扭矩和液控(负流量、正流量)
7,交叉感应全扭矩
8,恒扭矩、压力切断和负载敏感
9,恒扭矩、压力切断和液控(A7VO)
10,电控变流量
11,电控变扭矩
12,电控变补偿压力
13,电控变扭矩和变补偿压力
14,神钢(
15,CAT(交叉感应丫恒扭矩、负流量、变扭矩)。
液压挖掘机的三种流量控制方式
摘要:在液压挖掘机的负载适应控制策略中,负流量(Negative Flow Control)、正流量控制(Positive Flow Control)及负荷传感器控制(Load Sensing Control)三种流量控制方式的流行称谓,是按其泵控特性来分类的。
本文通过对多种厂牌型号挖掘机的比较分析,提出了旁通流量控制(By-pass Flow Control)、先导传感控制(Pilot Sensing Control)及负荷传感控制的分类。
这一分类方法,对于设计时比较不同控制系统的性能和维修时理解不同控制系统结构和功能的特点,都有所裨益。
1.流量控制
在挖掘机的液压系统内,流量Q、压力P及能耗(流量损失ΔQ、压力损失ΔP)等参数的变化,反映了液压传动过程的控制特性。
液压系统工作时,压力P不是系统的固有参数,而是由外负荷决定的。
因此,当发动机转速n e一定时,要对液压系统的功率进行调节,其实是对液压缸、液压马达等执行元件的进油量Q a进行调节(参看图1)。
图1.流量调节
如图2所示,有两种方法调节系统流量。
第一种方法是泵控方式,通过改变主泵的每转排量q来调节主泵的输出流量Q p,称为容积调速。
常见的容积调速方式包括:①利用主泵出口压力P P与主泵排量q的乘积保持不变的恒扭矩控制;②利用发动机转速传感(ESS)使主泵吸收的扭矩p P q与主泵转速n的乘积保持不变的恒功率控制;③
在临近系统溢流压力时,减小主泵排量的压力切断控制;④配用破碎头等作业附件时,由外部指令限定主泵最大排量的最大流量二段控制;⑤双泵系统中,利用两泵出口压力的平均值与主泵流量乘积保持不变的交叉功率控制(相加控制或总功率控制);⑥多泵系统中,因主泵组的液压总功率大于发动机的输出功率,为防止发动机出现失速,采用了极限负荷控制。
除了容积调速,还有一种泵控方式是通过动力模式下的变功率控制,利用外部指令设定不同工况下不同的发动机输出功率来改变主泵转速n e,从而调节主泵输出流量Q=nq。
调节系统流量的第二种方法是阀控方式,可对主泵输出的流量进行二次调节。
这种通过改变主控阀开度来调节执行元件的进油量,称为节流调速。
常见的节流调速采用操作手柄(踏板)先导阀输出的二次先导压力来调节主控阀的开度。
除了节流调速,还有其他多种阀控方式来调节执行元件的进油量,例如:在不同作业模式下,利用外部指令对双泵合流与分流的控制;动臂再生控制与斗杆再生控制;直线行走控制;复合作业时的动臂优先控制或回转优先控制等等。
容积调速的传动效率高,但是动特性差。
节流调速动特性好,但是传动效率低。
因此,在液压挖掘机上同时采用了容积调速与节流调节,以适应作业中执行元件对流量的需求。
不唯如此,为实现节能,还要使容积调速时对主泵的控制与节流调速时对主控阀的控制协调起来,泵控对阀控实时响应。
就是说,当主控阀的节流开度关小时,主泵的排量也要立即关小,反之亦然。
这种按需供油的泵阀联合控制被称为流量控制。
在液压挖掘机上,采用了三种流量控制方式:旁通流量控制、先导传感控制及负荷传感控制。
表1列出了部分厂牌机型采用的流量控制方式。