液压挖掘机铲斗轨迹控制
- 格式:pdf
- 大小:116.31 KB
- 文档页数:3

(此文档为word格式,下载后您可任意编辑修改!)综合课程设计II项目总结报告题目:液压挖掘机工装轨迹控制及仿真技术研究院(系)机电工程学院专业机械设计制造及其自动化学生学号班号指导教师填报日期2013年12月5日哈尔滨工业大学机电工程学院制2013年11月说明一、总结报告应包括下列主要内容:1.项目背景分析;2.研究计划要点与执行情况;3.项目关键技术的解决;4.具体研究内容与技术实现;5.技术指标分析;6.存在的问题与建议。
二、总结报告由指导教师填写意见、签字后,统一交所在院(系)保存,以备检查。
指导教师评语:指导教师签字:检查日期:哈尔滨工业大学课程设计任务书目录第一章挖掘机工装轨迹控制的机电液系统介绍 (1)1.1单斗液压挖掘机的机械模型简介 (1)1.2电液控制系统的组成 (2)第二章液压挖掘机工装轨迹的运动学分析 (4)2.1运动学问题 (4)2.2 运动学逆问题 (6)第三章液压挖掘机液压系统的建模分析 (9)3.1斗杆液压缸的传递函数 (9)3.2动臂液压缸的传递函数 (10)3.3其它环节传递函数 (10)3.4斗杆系统的整体建模与仿真 (12)3.5 动臂系统的整体建模与仿真 (14)第四章控制系统的电路设计 (17)4.1角度传感器的选择 (17)4.2 数据采集电路 (18)4.3 DA转换器及接口电路 (18)4.4 控制系统的电路原理图设计 (19)第五章控制方法的选择及MATLAB仿真技术 (21)5.1 计算机实现PID控制 (21)5.2 斗杆系统PID控制仿真 (22)5.3 动臂系统PID控制仿真 (25)参考文献 (29)第一章挖掘机工装轨迹控制的机电液系统介绍1.1单斗液压挖掘机的机械模型简介本次课程设计的液压挖掘机是针对学校的实验室用的样机模型,其容量为0.01立方米,动臂和斗杆为四连杆机构,动臂、斗杆和铲斗均由液压缸驱动,它们之间以销轴连接。
在动臂和斗杆的销轴上分别安装了角度传感器,用以检测相对位角。

2024年第48卷第3期Journal of Mechanical Transmission一种液压挖掘机最优能耗的轨迹规划方法张韵悦孙志毅孙前来王银杨江涛(太原科技大学电子信息工程学院,山西太原030024)摘要为了降低液压挖掘机的运动能量消耗,实现各关节的合理有效作业,提出了基于T型速度曲线的关节插值方法,以实现液压挖掘机最优能耗轨迹规划。
该方法将各关节的速度设定为匀加速、匀速和匀减速的形式以保证液压挖掘机在作业过程中的平稳性,以关节角度、角速度和角加速度为约束条件,利用改进的自适应遗传算法优化求解各关节的匀加(减)速和匀速运动时间,获得了各关节最优运动曲线,实现了液压挖掘机最优能耗轨迹规划。
对基于T型速度曲线的插值规划方法进行仿真实验,并在相同条件下与四次多项式插值结果进行了对比。
结果表明,该方法规划的轨迹能耗低,避免了各关节产生不必要的运动,有效减少了摩擦损耗,使得挖掘机可平稳、低能耗地完成作业。
关键词液压挖掘机T型速度曲线轨迹规划最优能耗A Trajectory Planning Method for Optimal Energy Consumption of theHydraulic ExcavatorZhang Yunyue Sun Zhiyi Sun Qianlai Wang Yin Yang Jiangtao(School of Electronic Information Engineering, Taiyuan University of Science and Technology, Taiyuan 030024, China)Abstract In order to reduce the movement energy consumption of the hydraulic excavator and realize the reasonable and effective operation of each joint, a joint interpolation method based on a T-type velocity curve is proposed to realize the optimal energy consumption trajectory planning of the hydraulic excavator. In this meth‑od, the speed of each joint is set as uniform acceleration, constant velocity, and uniform deceleration to ensure the stability of the hydraulic excavator in the operation process. Under the constraint conditions of the joint an‑gle, angular velocity, and angular acceleration, the improved adaptive genetic algorithm is used to optimize the uniform acceleration (deceleration) and constant velocity motion time of each joint, obtain the optimal motion curve of each joint, and realize the optimal energy consumption trajectory planning of the hydraulic excavator. The interpolation programming method based on the T-type velocity curve is simulated and compared with the interpolation results of the quartic polynomial under the same conditions. The experimental results show that the trajectory planned by this method has low energy consumption, avoids unnecessary movement of each joint, ef‑fectively reduces friction loss, and makes the excavator complete the operation smoothly and with low energy consumption.Key words Hydraulic excavator T-type velocity curve Trajectory planning Optimal energy con‑sumption0 引言液压挖掘机作为应用广泛的工程机械,在抢险救灾、交通运输以及土木建筑等行业发挥着极其重要的作用。
液压挖掘机行走操作及安全使用注意事项液压挖掘机是一种常见的重型机械设备,具有卓越的作业性能和灵活的作业方式。
使用液压挖掘机在工程项目中的作用非常重要,但同时也存在着一定的安全隐患。
为了保障施工安全,本文将介绍液压挖掘机的行走操作及安全使用注意事项。
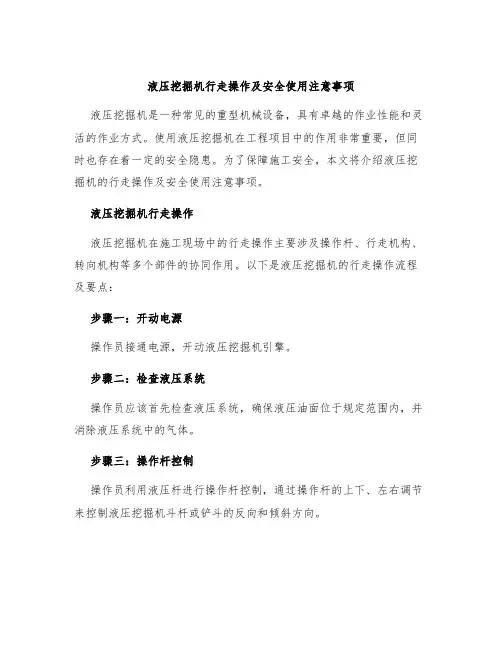
液压挖掘机行走操作液压挖掘机在施工现场中的行走操作主要涉及操作杆、行走机构、转向机构等多个部件的协同作用。
以下是液压挖掘机的行走操作流程及要点:步骤一:开动电源操作员接通电源,开动液压挖掘机引擎。
步骤二:检查液压系统操作员应该首先检查液压系统,确保液压油面位于规定范围内,并消除液压系统中的气体。
步骤三:操作杆控制操作员利用液压杆进行操作杆控制,通过操作杆的上下、左右调节来控制液压挖掘机斗杆或铲斗的反向和倾斜方向。
步骤四:行走机构操作操作员通过操纵驾驶台上的行走机构控制手柄,调节液压挖掘机的速度和方向。
其中,行走机构包括液压驱动轮、履带、减速器等组件。
步骤五:转向机构操作在进行转向操作时,操作员通过转向机构控制手柄,使车轮对称左右转动,实现液压挖掘机的转向。
安全使用注意事项在液压挖掘机使用过程中,由于机械设备的特殊性质,为避免可能的施工难点,也需要对其一些具体情况进行特别的安全使用。
以下是液压挖掘机使用过程中的注意事项:注意维护保养为确保液压挖掘机的使用寿命以及正常的施工进度,操作员应该定期维护液压系统、转向系统、电气系统等,及时更换耗损零部件,保证整个使用过程中设备的状态。
操作员必须熟悉并查看机器的警告标志和刻度盘在使用液压挖掘机前,操作员应该熟悉并检查机器上的警告标记和刻度盘等,确保能够正常满足安全使用标准。
小心机器倾斜机器在使用过程中可能会因地形、机械故障等原因倾斜,造成施工安全隐患。
对此,操作员应注意调整并保持良好平衡状态。
保持施工现场整洁施工现场的整洁程度非常重要,杂物、危险品等需要被有序的清除,以避免在施工过程中对设备和施工人员造成带来不必要的影响。
液压挖掘机是一种土石方施工机械,广泛应用于工程建设领域当中,并发挥着重要作用。
为了促进挖掘机朝着智能化方向发展,提升其自动化挖掘能力,应该对液压挖掘机运动轨迹进行科学规划。
国内外众多学者针对插值函数提出各种轨迹规划方法,在液压挖掘机运动学分析领域,包括杆组分析、适量代数和作图法等方法。
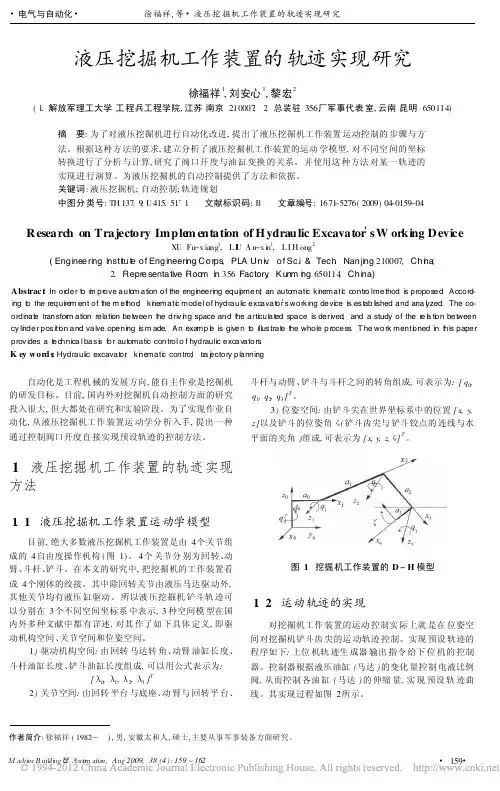
1 液压挖掘机工作装置运动学分析1.1 正运动学液压挖掘机相关机械装置具体包括四种自由度,为此需要在思维空间内展现出来,按照所选择的变量描述可划分成以下几个部分。
第一,由三组液压缸长度和回转马达夹角所构成的驱动结构空间;第二,由斗杆和铲斗两者夹角、动臂和斗杆夹角、回转平台和动臂夹角以及底座和回转平台夹角等部分形成关节空间;第三,由基础坐标系中的铲斗夹角状态和铲斗齿尖所形成的位姿空间。
创建液压挖掘机设备装置的运动学坐标系,随后根据相应的机器人坐标学原理能够了解到,空间坐标系中的任意一个向量都可以利用齐次转换矩阵转移至其他坐标系中,把转换矩阵与连杆坐标系进行相乘,能够获得铲斗齿尖坐标系。
根据液压挖掘机各种运行参数,能够计算出基础坐标系中的铲斗齿尖位置,从关节向量空间朝着铲斗位姿空间实施正向转化。
在抛除液压挖掘机实施回转运动条件下,绘制出液压挖掘机装置包络图,从理论上讲,铲斗齿尖理论能够囊括包络图限制范围内各个边界区域。
液压挖掘机相关正向运动即通过机械臂连杆参数对执行器末端位姿进行准确计算,建立D —H 坐标系。
挖掘机的铲斗齿尖是执行器末端,通过对变换矩阵进行研究发现,只有铲斗、斗杆和动臂之间转角关节为未知。
利用图形界面通过D —H 法绘制液压挖掘机运行软件,导出为单独运行软件。
将液压挖掘机装置连杆长度、机械臂动臂长度和简化后的机械臂斗杆长度输入软件当中,点击函数运算,便可以由软件主界面直接转移到函数绘制模块。
把液压挖掘机执行器末端位姿代表公式输入绘制界面中的CALLBACK 函数内,并对其他按钮函数进行科学设置,参考现有挖掘机参数测试软件性能,将现实状况和软件形成的液压挖掘机运行区域进行比较分析可以发现,软件绘制出来的挖掘机工作区域较为准确。
液压挖掘机行走操作及安全使用注意事项液压挖掘机是一种用于土方工程和矿山开采的工程机械。
它具有功率大、工作范围广、适应性强等特点,广泛应用于建筑、交通、水利、地质和煤炭等行业。
在使用液压挖掘机进行行走操作时,需要注意以下几个方面的安全使用事项。
一、液压挖掘机的行走操作流程:1. 开始行走前,先检查机器的移动部件,如履带、链轮、行走装置等,确保无异常故障。
2. 在行走前,务必调整好座椅、操纵杆和脚踏板的位置,保证舒适操作。
3. 在行走中,应遵循“左手刹,右手油门”的原则,即左手控制刹车,右手控制油门。
4. 行驶过程中,应保持稳定速度,避免急转弯和急刹车。
5. 行驶到要停止的地点时,先松开油门,再踩刹车,并确保挖掘臂、反铲等工作部件处于安全位置。
6. 停止行走后,关闭发动机,确保液压挖掘机处于停止状态。
二、液压挖掘机行走的安全使用注意事项:1. 在挖掘机行走前,应检查机器是否有异常情况,如液压油泄漏、紧固螺栓松动等,及时排除故障。
2. 行走时,应将挖掘机的各个部件和工作装置收起,保持车身整洁、稳定,并确保重要零部件完好。
3. 涉水行走时,应先查明水深和地势情况,选择合适的挡位和速度,并注意防止水溅入机器内部。
4. 爬坡行走时,应选择适当的挡位和速度,确保液压系统正常工作,并注意安全距离和操纵稳定。
5. 在行走过程中,应时刻关注周围环境,避开交通要道、人群和其他机械设备,确保安全。
6. 行驶到较窄的通道或工地时,应特别注意避免碰撞,保持稳定行驶。
7. 在行走过程中,如发现有异响、异味或异常振动等情况,应及时停车检查,排除故障。
8. 行走时,严禁在驾驶室内或车身上坐人或站人,确保司机的安全。
三、液压挖掘机行走的操作技巧:1. 提前观察行驶路线,了解地形和障碍物情况,合理安排行驶路径。
2. 在行驶过程中,操控好方向盘,注意调整行驶轨迹,避免碰撞障碍物。
3. 行驶中需注意调整和配合油门和刹车,掌握好速度和动力。
挖掘机使用中的灵活操控技巧挖掘机是一种重型工程机械,广泛应用于土方工程、矿山开采、道路建设等领域。
在挖掘机的使用过程中,掌握一些灵活操控技巧可以提高工作效率,减少操作难度。
本文将从操作手柄的运用、对地形的适应性、合理的操作顺序等方面,介绍挖掘机使用中的灵活操控技巧。
首先,掌握操作手柄的运用是灵活操控挖掘机的基础。
在挖掘机的驾驶室内,有一组手柄用于控制机器的各项动作。
熟练掌握手柄的功能和使用方法,可以更加精准地操作挖掘机。
例如,左手柄控制挖掘机的行走和转向,右手柄则控制挖斗的上下、左右和前后运动。
通过灵活运用手柄,可以使挖掘机在狭小的工作空间内自如穿梭,提高工作效率。
其次,对地形的适应性也是灵活操控挖掘机的重要技巧之一。
不同的工作环境和地形对挖掘机的操作要求各不相同。
在崎岖不平的地形上,需要更加稳定地操作挖掘机,避免侧翻或失控。
而在软弱的土壤中,需要注意避免挖掘机陷入泥潭。
因此,操作者需要根据具体情况,调整挖掘机的工作方式和动作幅度,以适应不同的地形条件。
另外,合理的操作顺序也是灵活操控挖掘机的关键。
在挖掘机的使用过程中,操作者需要根据具体工作要求,合理安排挖掘机的各项动作。
例如,在进行挖掘作业时,可以先将挖斗放在目标位置上方,然后将其缓慢下降,直到接触到工作面。
接着,通过调整挖斗的姿势和角度,进行挖掘作业。
通过合理的操作顺序,可以提高挖掘机的工作效率,减少不必要的动作和能源浪费。
此外,熟练掌握挖掘机的各项功能也是灵活操控的前提。
挖掘机具有多种功能,如挖掘、装载、平整等,操作者需要了解挖掘机的各项功能和使用方法,才能更好地应对不同的工作需求。
例如,挖斗的角度和速度可以根据具体情况进行调整,以提高挖掘效率和减少能耗。
此外,挖掘机还可以配备各种附件,如抓斗、破碎锤等,操作者可以根据需要进行更换,以适应不同的工作要求。
总之,挖掘机使用中的灵活操控技巧对于提高工作效率和降低操作难度非常重要。
通过掌握操作手柄的运用、对地形的适应性、合理的操作顺序以及熟练掌握挖掘机的各项功能,操作者可以更加灵活地操作挖掘机,提高工作效率,实现更好的工程效果。
铲斗浮动原理
嘿,朋友们!今天咱来聊聊铲斗浮动原理。
这可真是个超有趣的事儿啊!
你看,铲斗浮动就好像是一个灵活的舞者,在各种场景中自由舞动。
想象一下,铲斗就像是你的手,它能感知外界的力量,然后根据需要做出相应的动作。
比如说在挖掘的时候,铲斗能够顺应地面的起伏,轻轻松松地把土挖起来,这不就像你很自然地拿起一个东西一样吗!
那它到底是怎么做到的呢?其实啊,这背后是一系列巧妙的设计和机制在起作用呢!这就好比是一个精密的团队在协作。
铲斗的浮动是通过液压系统来实现的。
就好像你的身体里有无数的血管和神经在传递信号和提供能量一样,液压系统就是铲斗的“能量通道”。
当遇到不同的路况或工作需求时,液压油会流动到合适的位置,推动相应的部件,让铲斗能够自由地浮动。
比如说,在不平整的地面上作业时,液压系统会调整铲斗的姿态,让它稳稳地贴合地面,这多厉害呀!咱再想一下,如果没有这个神奇的浮动原理,那我们在操作铲斗的时候得多费劲啊,对吧!所以说,这个铲斗浮动原理可真是太重要啦!
总之呢,铲斗浮动原理就是这么神奇又实用,它让我们的工作变得更加轻松、高效!是不是超棒呢!。
2024年液压挖掘机行走操作及安全使用注意事项1)挖掘机起步前应检查环境安全情况、清理道路上的障碍物,无关人员离开挖掘机,然后提升铲斗。
2)准备工作结束后驾驶员应先按喇叭,然后操作挖掘机起步。
3)行走杆操作之前应先检查履带架的方向,尽量争取挖掘机向前行走。
如果驱动轮在前,行走杆应向后操作。
4)如果行走杆在低速范围内挖掘机起步,发动机转速会突然升高,因此驾驶员要小心操作行走杆菌。
5)挖掘机倒车时要留意车后空间,注意挖掘机后面盲区,必要时请专人指挥予以协助。
6)液压挖掘机行走速度高速或低速可由驾驶员选择。
当选择开关在0位置时,挖掘机将低速、大扭矩行走;当选择开头在1位置时,挖掘机行走速度将根据液压行走回路工作压力而自动升高或下降。
例如,挖掘机在平地上行走可选择高速;上坡行走时可选择低速。
如果发动机速度控制盘设定在发动机中速(约1400r/min)以下,即使选择开关在1位置上,挖掘机仍会以低速行走。
7)挖掘机应尽可能在平地上行走,并避免上部转台自行放置或操纵其回转。
8)挖掘机在不良地面上行走时应避免岩石碰坏行走马达和履带架。
泥砂、石子进入履带会场影响挖掘机正常行走及履带的使用寿命。
9)挖掘机在坡道上行走时应确保履带方向和地面条件,使挖掘机尽可能直线行驶;保持铲斗离地20-30cm,如果挖掘机打滑或不稳定,应立即放下铲斗;当发动机在坡道上熄火时,应降低铲斗至地面,将控制杆置于中位,然后重新启动发动机。
10)尽量避免挖掘机涉水行走,必须涉水行走时应先考察水下地面状况,且水面不宜超过支重轮的上边缘。
2024年液压挖掘机行走操作及安全使用注意事项(二)一、液压挖掘机行走操作注意事项1. 使用合适的行走路线:在行走前应仔细观察工作环境,选择合适的行走路线,并确保路线平坦、无障碍,以免发生意外情况。
2. 正确选择挡位:不同地形和工作条件下应选择合适的挡位,避免因挡位选择错误而导致液压挖掘机行走困难或危险。
3. 缓慢行走:在行走过程中应保持缓慢的速度,以确保驾驶员对周围环境的充分观察和灵活操作。
液压挖掘机行走操作及注意事项液压挖掘机是一种多功能的工程机械,广泛应用于各种施工场合,包括建筑、道路建设、矿山等。
其中,行走操作是液压挖掘机的基本操作之一,也是影响挖掘机稳定性和安全性的重要因素。
本文将介绍液压挖掘机行走操作的技巧和注意事项。
一、液压挖掘机行走系统液压挖掘机的行走系统主要由行走机构、传动机构和操纵机构三部分组成。
行走机构包括履带、履带轮和驱动机构,传动机构包括发动机、传动轴和行走油缸,操纵机构包括方向盘、行走手柄和油门踏板。
二、操作技巧1. 开始行走前,应先将挖掘机停稳,调整履带轮的张紧度,检查履带轨道是否干净,并做好行走路线规划。
2. 液压挖掘机行走速度应适中,速度过快易导致车体晃动或翻倒;速度过慢又会影响工作效率。
在行驶过程中,应随时注意前方道路情况,特别是弯道、坡路、无人值守路口等危险区段,保持安全速度和距离。
3. 液压挖掘机行走时,应选择平稳的路面,尽量避免行驶在崎岖不平的路面或坡度大的山路上。
在通过凹凸不平的路面时,应尽量平稳过坑,减缓行驶速度,以保证挖掘机不会出现跳跃现象。
4. 液压挖掘机在行驶过程中,不能突然转向或急刹车,以免破坏行走系统和损坏履带。
特别是在行驶到道路交叉口时,应提前减速并停车,等待信号灯转绿后再行驶。
三、注意事项1. 液压挖掘机行驶路线应事先规划好,尽量避免施工区域周围的人员和车辆,并注意绕行。
2. 液压挖掘机行驶过程中,应随时检查车况和各种仪表,发现问题及时停车维修。
当工作环境恶劣或能见度较差时,应开启前灯和警示灯,提高安全性。
3. 液压挖掘机停车后,应下车进行检查,确保车辆处于稳定状态,切勿疏忽大意。
4. 液压挖掘机在行驶过程中,应随时注意复杂施工环境,特别是在水泥路面和石子路面转换处,易导致车辆侧倾或翻车,应谨慎操作。
总之,液压挖掘机行走操作是保证工作安全和高效进行的基础,合理运用液压挖掘机行走系统,可提高工作效率和施工品质。
在进行行走操作时,应注意操作技巧和注意事项,以保证施工作业的成功实施。
液压挖掘机行走操作及安全使用注意事项范本一、液压挖掘机行走操作技巧1. 启动前的准备工作(1)检查液压挖掘机的液压系统、电气系统和传动系统是否正常,如有异常应及时处理。
(2)检查轮胎或履带是否磨损严重,是否松动或破损,如有问题应及时更换或修理。
(3)检查挖斗和割铲刀是否正常工作,如有异常应检查和修理。
2. 液压挖掘机的行走操作(1)在开始行走前,应先将挖斗或割铲刀升高至安全高度,避免与地面或障碍物碰撞造成损坏。
(2)在行走时,应保持平稳,并根据地形的不同选择合适的行走速度和行驶路线。
(3)在遇到坡道时,应注意控制好速度,并根据坡度和路面的情况,选择适当的挖掘机行走方式。
3. 液压挖掘机的转向操作(1)在进行转向操作时,应提前减速,并保持平稳,避免车辆失稳或侧滑。
(2)在行驶过程中需要改变行驶方向时,应提前使用转向器进行转向,并及时调整行走速度。
4. 液压挖掘机的刹车操作(1)在行驶过程中,如果需要紧急停车或下坡刹车时,应使用专用的刹车装置,并同时减速踏板和手刹。
(2)在刹车时,应注意避免突然踩刹车或猛踩刹车,以免造成车辆的失控或滑行。
(3)刹车时应注意控制好刹车力度和时间,避免车辆急停造成冲击或损坏。
二、液压挖掘机安全使用注意事项1. 挖掘机操作人员要经过专业培训,持证上岗,并熟知液压挖掘机的操作规程和安全规定。
2. 操作人员必须穿戴安全帽和防护鞋,保护好头部和脚部,并严禁戴耳机或使用手机等干扰操作的设备。
3. 在操纵挖掘机时,应保持专注和集中注意力,不要分散注意力或进行其他无关操作。
4. 在进行挖掘作业时,应保持车辆的稳定,避免发生倾覆或翻车的危险。
5. 不得超载使用挖斗或割铲刀,应按照挖掘机的工作参数来选择适当的工作负荷。
6. 工地周围应设置明确的标志和围栏,防止无关人员靠近作业区域,并设置警告标志和灯光以提醒过往车辆和行人。
7. 在进行液压挖掘机的维护保养时,应先切断电源和液压系统,确保设备处于安全状态。
液压挖掘机挖掘轨迹的控制装置和控制方法
应伟建;聂崇训
【期刊名称】《国外工程机械》
【年(卷),期】1991(017)006
【总页数】7页(P25-31)
【作者】应伟建;聂崇训
【作者单位】不详;不详
【正文语种】中文
【中图分类】TU621
【相关文献】
1.液压挖掘机直线挖掘轨迹控制 [J], 彭灿;陈欠根;张大庆;贺继林
2.液压挖掘机反铲装置特殊工作尺寸及挖掘轨迹包络图 [J], 洪昌银
3.基于正铲液压挖掘机挖掘轨迹的机构运动学分析 [J], 张正兵;陈进;李晓娜
4.液压挖掘机反铲装置特殊工作尺寸挖掘轨迹包络图 [J], 洪昌银
5.液压挖掘机直线挖掘轨迹控制 [J], 彭灿;陈欠根;张大庆;贺继林
因版权原因,仅展示原文概要,查看原文内容请购买。
液压挖掘机作业操纵系统介绍液压挖掘机的作业操纵系统是用来完成挖掘作业中各种动作的操纵,它是挖掘机的主要操纵系统。
液压挖掘机挖掘作业过程中主要有铲斗转动、斗杆收放、动臂升降和转台回转等四个动作。
作业操纵系统中工作油缸的推拉和液压马达的正、反转,绝大多数是采用三位轴向移动式滑阀来控制油液流动的方向,而作业速度则是根据液压系统的型式(定量系统或变量系统)和阀的开度大小等由操作人员控制或者通过辅助装置来控制。
对作业操纵系统的基本要求对液压挖掘机作业操纵系统的基本要求包括:1)作业操纵系统要集中布置在驾驶室内,并符合人体机能学的要求。
例如,按男子160-180cm、女子150-170cm身高来设计、布置操纵装置及驾驶室。
2)作业操纵时的启动和停止应平稳,并控制其速度和力量。
可以同时控制复合动作。
3)操纵简单,轻便和直观。
一般手柄上的操作力不超过40-60N,而单边的手柄操作选种不超过17cm,转动手柄的转角不超过35-40度。
脚踏板转动角度不超过60-70度。
踏板行程在6-20cm范围内,踏板的踏动力不超过80-100N。
4)操纵机构的杠杆变形要小,机构组成的间隙和空行程要小。
5)操纵手柄和脚踏板的数目量少,最好可以手脚联动,便于操作人员做复合操作。
6)应保证在-40-50度的范围内操作性能正常。
作业操纵系统的基本形式根据推动主分配阀的动力来源,液压挖掘机作业操纵系统的基本型式可分为机械杠杆式、液压式、气压式和电气式等。
由于液压挖掘机所采用的油路流量大、压力高,主分配阀阀杆的推动力较大,因此采用液压式、气压式和电气式操纵可以减轻操作人员的劳动强度,并便于操纵系统的合理布置。
机械操纵系统目前许多的液压挖掘机仍采用机械操纵系统,其优点是结构简单、工作可靠。
在机械操纵系统中,挖掘机的铲斗、动臂、斗杆和回转分别是由各自的控制手柄通过杠杆和主分配阀连接。
从“前开始供油”到“后开始供油”的区段为手柄空行程。
空行程的大小一般取决于销轴的装配间隙和杠杆的刚度,即间隙小、刚度大时空行程小,反之则大。