微动开关-欧姆龙学堂-技术指南
- 格式:doc
- 大小:775.50 KB
- 文档页数:23



微动开关微动开关一种电子开关,使用时轻轻点按开关按钮就可使开关接通,当松开手时开关既断开,其内部结构是靠金属弹片受力弹动来实现通断的。
微动开关由于体积小重量轻在家用电器方面得到广泛的应用如:彩电按键,影碟机按键,电脑鼠标等等。
但微动开关也有它不足的地方,频繁的按动会使金属弹片疲劳失去弹性而失效。
因此现在大部分电器的按钮都使用导电橡胶来代替,比如电脑键盘,遥控器等。
还可用于控制照明灯和排风扇等小功率家用电器。
微动开关在市电停电后自动断开。
再次来电时不会自行接通 (需按动控制按钮才能接通),可避免因电器长期通电而耗费电能或引发意外事故。
关于微动开关四角的接法问题:距离较远的两脚短接即可,四角是为了微动开关焊接得更稳固。
热电偶传感器热电偶传感器是一种自发电式传感器,测量时不需要外加电源,直接将被测量转换成电势输出。
使用十分方便,常被用作测量炉子、管道内的气体或液体的温度及固体的表面温度。
它的测温范围很广:-270℃~2500℃。
它具有结构简单、制造方便、测量范围广、精度高、惯性小和输出信号便于远传等许多优点。
三、热电偶的分类:1.热电偶的结构分类:(1)普通装配式热电偶:一般由热电极、绝缘套管、保护套管和接线盒等几部分组成。
(2)铠装式热电偶(缆式热电偶):此种热电偶是将热电极、绝缘材料连同保护管一起拉制成型,经焊接密封和装配等工艺制成的坚实的组合体热电偶工作原理一、热电效应(又称温差电效应):将两种不同成分的导体组成一个闭合回路,当闭合回路的两个接点分别置于不同的温度场图3-5 热电偶回路中,回路中产生一个方向和大小与导体的材料及两接点的温度有关的电动势,这种效应称为“热电效应”。
一、均质导体定律:如果热电偶回路中的两个热电极材料相同,无论两接点的温度如何,热电偶回路内的总热电动势均为零。
应用:由于两相同的热电极材料间无自由电子的扩散运动,总电动势为零。
因此,可用于检查热电极成分是否相同。
二、中间导体定律:在热电偶A、B回路中接入第三种导体C,只要第三种导体的两接点温度相同,则回路中总的电动势不变。

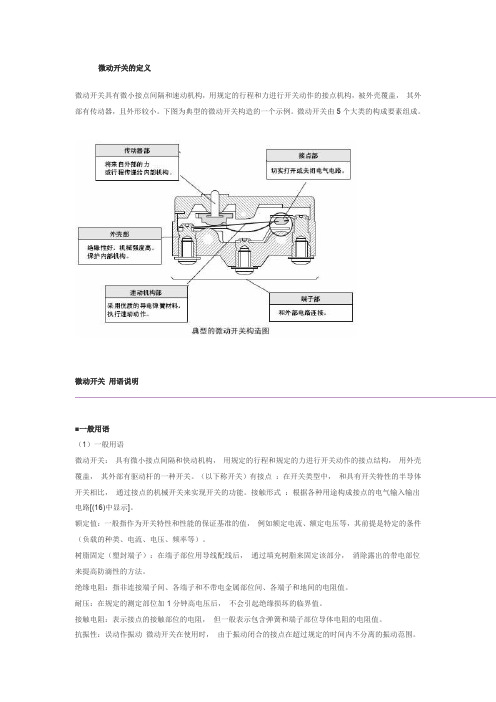
微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳覆盖,其外部有传动器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组成。
微动开关用语说明■一般用语(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结构,用外壳覆盖,其外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导体开关相比,通过接点的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)中显示]。
额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是特定的条件(负载的种类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出的带电部位来提高防滴性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的振动范围。
抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损伤,并满足动作特性的范围内的冲击。
误动作冲击?指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态开关的试验条件如下。
环境温度:20±2℃、相对湿度:65±5%RH、气压:101.3kPa(5)N水平参考值表示可靠度为60%(λ60)下的故障水平。
微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳覆盖,其外部有传动器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组成。
微动开关用语说明■一般用语(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结构,用外壳覆盖,其外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导体开关相比,通过接点的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)中显示]。
额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是特定的条件(负载的种类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出的带电部位来提高防滴性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的振动范围。
抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损伤,并满足动作特性的范围内的冲击。
误动作冲击?指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态开关的试验条件如下。
环境温度:20±2℃、相对湿度:65±5%RH、气压:101.3kPa(5)N水平参考值表示可靠度为60%(λ60)下的故障水平。
欧姆龙20m-of微动
接近开关是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而驱动直流电器或给计算机(plc)装置提供控制指令。
接近开关是种开关型传感器(即无触点开关),它既有行程开关、微动开关的特性,同时具有传感性能,且动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
产品有电感式、电容式、霍尔式、交、直流型。
接近开关又称无触点接近开关,是理想的电子开关量传感器。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
它广泛地应用于机床、冶金、化工、轻纺和印刷等行业。
在自动控制系统中可作为限位、计数、定位控制和自动保护环节等。
欧姆龙20m-of微动。
微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳覆盖,其外部有传动器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组成。
微动开关用语说明■一般用语(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结构,用外壳覆盖,其外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导体开关相比,通过接点的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)中显示]。
额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是特定的条件(负载的种类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出的带电部位来提高防滴性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的振动范围。
抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损伤,并满足动作特性的范围内的冲击。
误动作冲击?指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态开关的试验条件如下: 环境温度:20±2℃、相对湿度:65±5%RH、气压:101.3kPa (5)N水平参考值表示可靠度为60%(λ60)下的故障水平。
λ60=0.5×10-6/次表示在可靠度为60%下,故障率为次以下。
(6)接点的形状和种类(7)接点间隔接点间隔规定为0.25mm、0.5mm、1.0mm、1.8mm 4种。
接点间隔是设计时的目标。
使用时,需要最小接点间隔的话请另外确认后进行选择。
一般接点间隔的标准为0.5mm。
对于相同的开关机构,接点间隔越小MD就越小,灵敏度也越高,机械方面的寿命(寿命)也越长,但直流的断路性能和抗振动、抗冲击方面就不利了。
微动开关由于电流开关会损耗接点,接点间隔变大,MD加大则灵敏度下降,因此为了实现高灵敏度使用接点间隔0.25mm的微动开关时,必须保持较小的开关电流,以减小电流开关引起的接点损耗。
接点间隔大的产品,抗振动、抗冲击性和断路性能良好。
关于MD (应差距离)请参见(10)动作特性用语(745页)。
形状名称主要使用材料加工方法主要用途为了在微小负载区域得到稳定的接触可靠性时使用。
接触方式为正交,使用金合金等具有优良耐环境性的接点材料。
需要特别高的可靠性时,也可使用有2个横杆的双横杆。
横杆金合金银合金焊接或者铆接针银为了在继电器负载程度的负载区域中提高接触可靠性而使用。
将铆钉型接点的曲率半径R缩小到极小的1mm 左右,目的是提高每单位面积上的接点接触压力。
铆钉银镀银银合金镀金在从一般用负载到高负载区域中最为广泛使用。
对于固定接点,常采用为除去由于开关开合的生成物的沟槽加工,以及为了防止银接点的氧化、硫化的影响而进行镀金。
电视机的输入开关等开关较大的电流时,使用硬度高的银合金。
(7)接点间隔接点间隔规定为0.25mm、0.5mm、1.0mm、1.8mm 4种。
接点间隔是设计时的目标。
使用时,需要最小接点间隔的话请另外确认后进行选择。
一般接点间隔的标准为0.5mm。
对于相同的开关机构,接点间隔越小MD(差动行程)就越小,灵敏度也越高,机械方面的寿命(寿命)也越长,但直流的断路性能和抗振动、抗冲击方面就不利了。
微动开关由于电流开关会损耗接点,接点间隔变大,MD加大则灵敏度下降,因此为了实现高灵敏度使用接点间隔0.25mm的微动开关时,必须保持较小的开关电流,以减小电流开关引起的接点损耗。
接点间隔大的产品,抗振动、抗冲击性和断路性能良好。
表示字符接点间隔直流电流切断动作力和行程精度及寿命(寿命)抗振动抗冲击主要优点H 0.25mm △极小☆△高精度·高寿命G 0.50mm ○ 小◎○ 一般用F 1.00mm ◎中○ ◎G与E的中间特性E 1.80mm ☆大△☆抗振动·抗冲击性好☆:优◎:良○ :普通△:劣(8)速动机构速动机构,可以使可动接点迅速地从一个固定接点移动到其他固定接点,而尽可能不受操作速度的影响。
例如,即使是闸刀开关,如果快速操作手柄,动作就会变快,但是,操作手柄的速度与接点运动速度相关的这种机构不叫速动型,而叫做缓动型。
接点的开关速度越快,接点间产生电弧的持续时间就会越短。
这样,就会导致接点的消耗、损伤减少,并可以维持稳定的特性。
但是,在该开关速度中,除有效减少电弧量的速度界限(经济速度)外,也有机械问题的界限,特别是,闭路时如果开关速度过快,可动接点与固定接点的冲击能量就会变大,冲击形成的跳跃现象(振动或摩擦闭合)会产生电弧,此时会严重损耗接点,有时还会不能打开电路,导致接点熔化。
进行这种快速动作的机构,一般会使用具备死点(从一个状态跳跃性地变化到其他状态时的临界作用点)的弹簧机构。
下图表示将拉力弹簧和压缩弹簧进行组合后,形成微动开关速动机构的示例。
以下就有关双投型(Z)速动机构的动作原理进行说明。
如下图所示,为开关的力的关系。
在未对传动器施加外力的自由位置中,由于受到2个力-F2与F0的影响,压缩弹簧的反作用力F1处于平衡状态。
F0为将可动接点c推到固定接点b的压力。
接着,通过传动器对拉力弹簧的一部分施加力,使拉力弹簧移位,此时,N点的力F1和F2将依次变大,夹角接近180°,不久,仅F1和F2处于平衡状态,即F0=0。
从自由位置到F0=0间存在滑动作用,会使接点向水平方向移动,并进一步弯曲压缩弹簧。
从F0=0的位置,通过进一步施加外力,使拉力弹簧微量移位,就会产生反方向的力-F0,以弯曲压缩弹簧的最大强力将可动接点c从下方向压出,可动接点c 就会穿过空间向对面的固定接点a 移动。
利用这一动作原理,微动开关以开关固有的切换速度(离开速度)切换接点,而与按住拉力弹簧时产生外力的速度无关。
F0=0时的位置称为动作位置,与拉力弹簧的一部分通过死点的位置基本一致。
消除外力进行复位操作时,也是基于相同的原理,而此时弹簧的弯曲反作用力即为复位原动力。
微动开关基于拉力弹簧和压缩弹簧的组合进行动作的原理图(9)接触电阻·接点接触力特性接触电阻根据接点接触力而变化,下图表示了其关系。
接点接触力变大的话接触电阻变得较稳定(变小),相反当接触力变小的话就开始变得不稳定(变大)。
接触电阻·接点接触力特性(10)动作特性的相关用语动作特性的定义分类用语略称单位偏差表示方法定义力动作力(OperatingForce)OF N 最大从自由位置运行到动作位置必须加到驱动杆上的力。
回复力(ReleasingForce)RF N 最小从总行程位置运行到复位位置必须加到驱动杆上的力总行程所需的力(Total travelForce)TTF N从自由位置运行到总行程位置必须加到驱动杆上的力行程预行程(Pre travel)PTmm、度最大从驱动杆的自由位置到动作位置的移动距离或移动角度过行程(Over travel)OTmm、度最小从驱动杆的动作位置到总行程位置的移动距离或移动角度应差距离(MovementDifferential)MDmm、度最大从驱动杆的动作位置到复位位置的移动距离或移动角度总行程(Total travel)TTmm、度从驱动杆的自由位置到总行程位置的移动距离或移动角度。
位置自由位置(Free Position)FPmm、度最大没有施加外力时驱动杆的位置动作位置(OperatingPosition)OPmm、度±驱动杆受到外力,动接点正好从自由位置状态开始反转时的驱动杆的位置复位位置(ReleasingPosition)RPmm、度减少驱动杆上的外力,可动接点从动作位置状态正好开始返回自由位置状态时的驱动杆的位置。
总行程位置(Total travelPosition)TTPmm、度驱动杆到达传动停止位置时驱动杆的位置。
关于偏差的解释例(例)Z-15G-B OF(动作力)2.45~3.43N.解释:表示将加在驱动杆上的力从0开始增加到3.43N,无论哪个开关都应动作。
(11)力、冲程、接点接触力特性微动开关的动作特性用力、冲程特性来表示。
下图表示这一特性。
即将横轴冲程(传动器的行程)施加到纵轴传动器上,取得此时所施加的力。
微动开关的特点如下:①在动作时和还原时,力急剧变动,同时发出开关的切换音,由此可以判断开关的动作位置(OP) 和复位位置(RP)。
②由于存在响应差的行程(MD),因此,即使操作传动器的操作体产生移动或上下晃动,可动接点中的其中一个固定接点也是稳定的,因此,可动接点适用于机械检测用开关。
③由于接点的切换会快速进行,因此,在电流开关时电弧连接时间较短的小型开关中,可以开关较大的电流。
下图表示冲程和接点接触力的关系。
在自由状态下,随着将传动器逐渐押入,接点接触力将会逐渐减少,而到达OP后,接点接触力将会变为零,可动接点从常闭(NC)向常开(NO)反转,随即产生接触力。
如果再次押入传动器,NO侧的接触力将会增大。
传动器复位时,NO侧变为零,接着就会在NC侧产生接触力。
(12)接点切换时间操作速度和接点切换时间的关系如右图所示。
随着传动器的操作速度逐渐变慢,接点切换时间会逐渐变长。
因此,应用规定的最小操作速度来测定接点切换时间。
下图中的测定电流规定为如下:微小负荷用微动开关的通电电流为1mA,一般用途微动开关的通电电流为100mA。
如下图所示,接点切换时间为不稳定时间、反转时间及振动时间之和,一般微动开关的接点切换时间为5~15msec。
这里,不稳定时间是由接触电阻不稳定引起的,而接触电阻不稳定是由前述接点反转前的接点接触力降低及接点摩擦闭合所导致的。
速动机构的机械反转会产生反转时间。
可动接点冲击固定接点时的振动会产生振动时间。
不稳定时间和振动时间会使接点发热,引起接点熔化,而在和电子电路连接后,还可能会引起电子电路的误动作。
因此,设计微动开关时,应尽量缩短不稳定时间和振动时间。