机器人学-第三章机器人运动学正解
- 格式:ppt
- 大小:820.50 KB
- 文档页数:7
解释机器人运动学方程的正解和逆解
机器人运动学方程是研究机器人运动规律的一种数学工具。
机器人运动由位置、速度和加速度三部分组成,而机器人运动学方程便是描述这三部分关系的方程。
机器人运动学方程分为正解和逆解。
正解是指根据机器人关节角度、长度等参数,推导出机器人末端执行器的位置、速度和加速度等运动学参数的过程。
在机器人运动学分析中,正解一般使用解析法、几何法和向量法等方法。
通常我们会在正解中借助三角函数和向量函数,对机械臂的运动主体进行数学建模,推导出机器人最终执行器的位置和末端的速度、加速度等参数,完成机器人运动学方程的正解。
而逆解则是指在已知机器人末端执行器的位置、速度和加速度等参数的基础上,求出机器人关节角度,这样机器人才能达到需要执行的动作。
逆解是机器人指令控制中的核心技术之一,一般采用数值计算的方法来求解。
逆解方法有直接法和迭代法两种,直接法一般应用于计算复杂的工业机器人,而迭代法则更适用于机场搬运、医疗康复等关节数较少的应用场景。
机器人运动学方程的正解和逆解都涉及高等数学和工程数学的知识,需要对机器人的运动学规律有一定的理解和掌握。
随着人工智能和机器人技术的不断发展,机器人运动学方程的应用将得到更广泛的推广和应用,成为未来机器人研究和应用的重要工具。
举例说明机器人运动学正解的求解过程-回复机器人运动学正解是指根据机器人的关节坐标和末端执行器坐标来计算机器人的关节变量,以实现特定的末端执行器运动。
在此过程中,通过利用几何学和代数学的知识,可以推导出机器人的正解方程,并将其转化为求解关节变量的问题。
下面将详细介绍机器人运动学正解的具体求解过程。
1. 建立机器人的坐标系:首先,需要确定机器人坐标系的建立方式。
一般来说,机器人坐标系可以分为基座标系(也称为基座标系)和末端执行器坐标系。
基座标系用于描述机器人的位置和朝向,而末端执行器坐标系用于描述机器人末端执行器的位置和朝向。
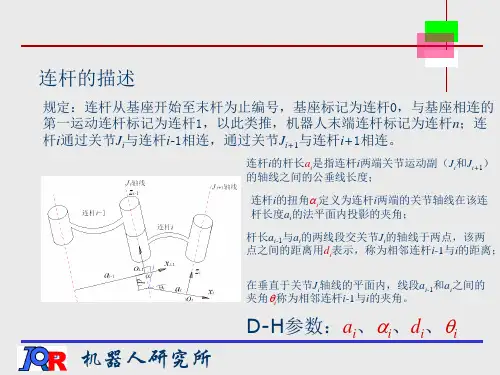
2. 确定机器人的关节参数:机器人的关节参数包括关节长度、关节角度、关节型号等。
这些参数的确定是根据机器人的实际结构和设计需求来确定的。
3. 建立机器人的正解方程:机器人的正解方程描述了机器人的末端执行器坐标与关节坐标之间的关系。
一般来说,机器人的正解方程可以通过运动学链式法则得到。
链式法则是基于连续的变换矩阵构建的,每个关节均有一系列变换矩阵,最终得到机器人的正解方程。
4. 求解机器人的正解方程:根据机器人的正解方程,我们可以将末端执行器坐标作为已知量,求解关节变量。
这一步可以通过将正解方程转化为一个线性方程组来实现。
一般来说,线性方程组的求解可以通过矩阵运算或数值计算方法来实现。
5. 解的复现和验证:求解得到的关节变量需要进行复现和验证。
这一步可以通过将求解得到的关节变量带入机器人的正解方程中,计算得到新的末端执行器坐标,与原始的末端执行器坐标进行对比,以验证求解结果的准确性。
总结起来,机器人运动学正解的求解过程包括建立机器人的坐标系、确定机器人的关节参数、建立机器人的正解方程、求解机器人的正解方程以及解的复现和验证。
这一过程需要运用几何学、代数学和数值计算等知识,通过推导和计算来实现机器人的正解。
通过机器人运动学正解,我们可以根据给定的末端执行器坐标来计算机器人的关节变量,从而实现特定的末端执行器运动。
解释机器人运动学方程的正解和逆解正解与逆解是机器人运动学方程的重要概念,也是机器人学研究中最重要的内容之一。
正解和逆解可以帮助我们建立机器人的空间模型,从而控制机器人的运动状态,为机器人的实际应用提供有力的支持。
本文将对机器人运动学中的正解和逆解的概念及其在机器人学中的应用进行详细剖析。
一、正解与逆解概念介绍正解和逆解是机器人运动学中常用的概念,也是机器人学研究中最重要的内容之一。
正解是指从给定的末端位姿或空间位置确定机器人的轴位置的运算,而逆解则是反之,从给定的关节位置到末端位姿的运算。
因此,机器人运动学中的正解和逆解都是从关节位置到末端位姿和反之的一种运算。
二、正解的求解方法正解的求解方法主要有三种,分别为数值法、解析法和实验法。
(1)数值法数值法是指将从给定末端位姿或空间位置求解机器人轴位置的过程采用数学计算的方法来求解。
这种方法的优点在于可以根据实际情况采用不同的公式来求解,也可以用数值算法来求解机器人的轴位置。
其缺点是计算量大,求解速度慢,无法满足实时性要求。
(2)解析法解析法是指利用数学分析方法,从一整套已知机器人轴位置求解和从末端位姿求机器人轴位置的过程,运用特定的反函数,做单就反函数,解出机器人轴位置。
这种方法计算时间短,可以满足实时性要求,但缺点是所用的反函数不一定准确,容易发生解析法错误。
(3)实验法实验法是指实际应用中,通过针对特定的机器人空间进行实验,来确定机器人轴位置的过程。
这种方法好处在于可以得到准确的机器人轴位置,不受数学计算模型的影响,缺点是计算时间长,不能满足实时性要求。
三、逆解的求解方法逆解的求解方法主要也有三种,分别为数值法、解析法和实验法。
其中,数值法包括逐次迭代法、牛顿迭代法等;解析法包括几何法、角度法等;实验法包括传感器测量法、机器人调试法等。
(1)数值法数值法是通过几何和动力学方面的矩阵求解形式,利用数值计算技术,从给定的关节位置计算机器人构成末端位姿的过程。