S SMART的功能指令
- 格式:ppt
- 大小:1.26 MB
- 文档页数:49
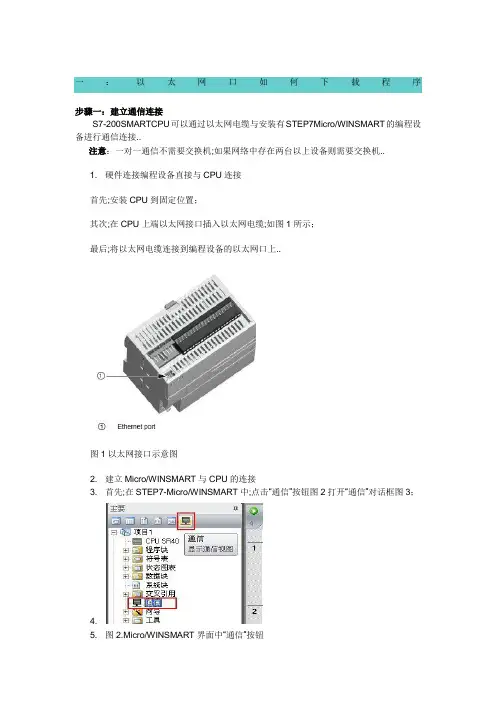
一:以太网口如何下载程序步骤一:建立通信连接S7-200SMARTCPU可以通过以太网电缆与安装有STEP7Micro/WINSMART的编程设备进行通信连接..注意:一对一通信不需要交换机;如果网络中存在两台以上设备则需要交换机..1. 硬件连接编程设备直接与CPU连接首先;安装CPU到固定位置;其次;在CPU上端以太网接口插入以太网电缆;如图1所示;最后;将以太网电缆连接到编程设备的以太网口上..图1以太网接口示意图2. 建立Micro/WINSMART与CPU的连接3. 首先;在STEP7-Micro/WINSMART中;点击“通信”按钮图2打开“通信”对话框图3;4.5. 图2.Micro/WINSMART界面中“通信”按钮6.7.8. 图3.通信对话框9.10. 然后;进行如下操作:a.单击“网络接口卡”下拉列表选择编程设备的“网络接口卡”..b.双击“查找CPU”来刷新网络中存在的CPU;c.在设备列表中跟据CPU的IP地址选择已连接的CPU..d.选择需要进行下载的CPU的IP地址之后;单击“OK”按钮;建立连接..同时只能选择一个CPU与Micro/WINSMART进行通信注意:如果网络中存在不只一台设备;用户可以在“通信”对话框中左侧的设备列表中选中某台设备然后点击“FlashLights”按钮轮流点亮CPU本体上的RUN;STOP和ERROR灯来辨识该CPU..也可以通过“MAC地址”来确定网络中的CPU;MAC地址在CPU本体上“LINK”指示灯的上方..步骤二:为编程设备分配IP地址如果编程设备使用内置适配器卡on-boardadaptercard连接网络;则CPU和编程设备的内置适配器卡on-boardadaptercard的IP地址网络ID和子网掩码必须一致..网络ID为IP 地址的前三个八位字节;例如:192.168.2.77粗体部分;默认的子网掩码通常为具体操作步骤如下基于WindowsXPSP3操作系统:1. 打开“本地连接状态”对话框;如图4所示;2. 方式一:单击“开始”按钮->单击“控制面板”->双击打开“网络连接”->双击“本地连接”3. 方式二:在任务栏右下角单击“本地连接”图标4.5. 图4.“本地连接状态”对话框6. 单击“属性”按钮;打开“本地连接属性”对话框;如图5所示;7.8.9. 图5.“本地连接属性”对话框10. 在“此连接使用下列项目”区域中;滑动右侧滚动条;找到“Internet协议TCP/IP”并选中该项;单击“属性”按钮;打开“Internet协议TCP/IP属性”对话框;如图6所示;11.12.13. 图6“Internet协议TCP/IP属性”对话框14.15. 选中“使用下面的IP地址”前面的单选按钮然后进行如下操作:16. a.输入编程设备的IP地址必须与CPU在同一个网段;17. b.输入编程设备的“子网掩码”必须与CPU一致;18. c.输入默认网关必须是编程设备所在网段中的IP地址;19. d.单击“确定”按钮;完成设置..20.21. 注意:IP地址的前三个字节必须同CPU的IP地址一致;后一个字节应在"1-254"之间避免0和255;避免与网络中其它设备的IP地址重复..步骤三:修改CPU的IP地址可选在Micro/WINSMART中可以通过系统块修改CPU的IP地址;具体步骤如下:1. 在导航条中单击“系统块”按钮;或者在项目树中双击打开“系统块”对话框;如图7所示:2.3.4. 图7.“系统块”按钮5. 打开系统块对话框;如图8所示:6.7.8. 图8.系统块对话框9.10. 然后进行如下操作:11. a.选择CPU类型与需要下载的CPU类型一致;12. b.选择“通信”选项;13. c.勾选“随项目存储IP信息”;14. d.设置IP地址;子网掩码和默认网关;15. e.单击“确定”按钮;完成设置..注意:由于系统块是用户创建的项目的一部分;所以只有将系统块下载至CPU时;IP地址修改才能够生效..步骤四:下载程序在Micro/WINSMART中点击“下载”按钮;如图9所示;图9.Micro/WINSMART界面中“下载”按钮位置打开下载对话框图10;选择需要下载的块如果进行了“步骤三”;则必须下载系统块才能完成IP地址修改;单击“下载”按钮进行下载..图10.下载对话框注意:如果CPU在运行状态;Micro/WINSMART会弹出提示对话框;提示将CPU切换到STOP模式;点击“YES”..图11.下载成功对话框下载成功后;“下载”对话框会显示“下载成功”;点击“关闭”按钮关闭对话框;完成下载;如图11所示..注意:如果用户在完成通信设置步骤一后打开一个新的项目文件再进行下载操作会要求用户重新进行通信连接设置..常问问题:为何程序下载不成功产生此问题的原因有很多;可按照如下步骤逐一检查:1. 检查硬件连接2. 网络电缆是否连接好;在CPU本体左上角以太网接口处有“以太网状态”指示灯“LINK”;此灯常亮表示以太网连接成功..3. 检查编程设备的IP地址是否与CPU的IP地址在同一网段中4. 编程设备必须与CPU在同一网段中..S7-200SMARTCPU预置的IP地址为:..5. 通信参数不匹配6. 若下载系统块;注意用户项目系统块中的CPU类型是否与实际CPU类型相符合;若不符合则会报错..为什么S7-200SMART上传程序后程序块丢失如果程序上传的过程中没有报错;但是打开上传程序后;只看到主程序或者只显示部分程序如下图a.;有可能是因为其他程序块未打开;可以点击图中b.的程序块文件夹;选择需要查看的程序块;双击打开即可..图11.下载成功对话框注意:•为了保证程序的完整有效;建议备份源程序;因为即使可以上传程序;也有程序上传不完整的的风险;如非特殊情况;不推荐使用上传的程序..二:带RS485口和DP01上传/下载程序S7-200SMART在软件和固件为V2.3开始支持使用编程电缆6ES7901-3DB30-0XA0给CPU本体的RS485口和DP01上传下载程序本文档使用硬件及软件介绍如下:S7-200SMARTCPU:SR60V2.3;DP01编程软件:STEP7Micro/WINSMARTV2.3编程电缆:6ES7901-3DB30-0XA0S7-200USB/PPI电缆建立通讯连接下载/上传前需要先建立通信连接1.硬件连接首先;安装CPU到固定位置;其次;在CPU左下角485通讯口插上编程电缆最后;将编程电缆另一端连接到编程设备;并且给CPU上电2.建立Micro/WINSMART与CPU的连接首先;在STEP7-Micro/WINSMART中;点击“通信”按钮打开“通信对话框”;图1.Micor/WINSMART界面中“通信”按钮图2.通信对话框然后;进行如下操作:a.单击“网络接口卡”下拉列表选择PC/PPIcable.PPI.1;b.单击“查找CPU”来刷新网络中存在的CPU;c.在“找到的CPU”列表里选择需要进行下载的CPU之后;单击“确定”按钮;建立连接..注意:站地址和波特率不需要进行设置;编程电缆会搜索所有波特率;最终把实际的站地址和波特率显示出来..上传程序在Micro/WINSMART中点击“上传”按钮;如图3所示:图3.Micro/WINSMART界面中“上传”按钮位置打开“上传对话框”图4;选择需要上传的块;单击“上传”按钮进行上传..图4.上传对话框图5.上传成功对话框上传成功后;上传对话框会弹出显示“上传已成功完成”;点击“关闭”按钮关闭对话框;完成上传..下载程序在Micro/WINSMART中点击“下载”按钮;如图6所示:图6.Micro/WINSMART界面中“下载”按钮位置打开下载对话框图7;选择需要下载的块;单击“下载”按钮进行下载..图7.下载对话框注意:如果CPU在运行状态;Micro/WINSMART会弹出提示对话框;提示是否将CPU切换到STOP模式;点击“是”;图8.下载成功对话框下载成功后;下载对话框会弹出显示“下载已成功完成”;点击“关闭”按钮关闭对话框;完成下载..通过DP01模块的RS485口上传/下载程序通过DP01上传下载程序;需要先通过以太网口或者CPU本体的485口下载配置有DP01的系统块;之后的操作参照“通过S7-200SMARTV2.3本体自带RS485口上传/下载程序”三:下载时以太网口搜索不到CPU怎么办为何程序下载时搜索不到CPU产生此问题的原因有很多;比如安装了360安全卫士、金山卫士以及管家等第三方杀毒软件;或者Windows操作系统非完整版操作系统;例如安装了GHOST版本的操作系统;其他定制化的操作系统..可按照如下步骤逐一检查:1. 检查硬件连接2. 网络电缆是否连接好;在CPU本体左上角以太网接口处有“以太网状态”指示灯“LINK”;此灯常亮表示以太网连接成功..3. 检查编程设备的IP地址是否与CPU的IP地址在同一网段中4. 编程设备必须与CPU在同一网段中..S7-200SMARTCPU预置的IP地址为:..5. 如果使用STEP7Micro/WINSMART查找CPU无法找到或者可以找到CPU;但是点击“确定”时出现以下对话框;如图1;所示..6.7. 图1.端口无法打开8. 当编程软件弹出上述对话框时;我们需要在操作系统的控制面板中;打开“设置PG/PC接口”;确保“MWSMART”应用程序访问点选择的是当前PC机使用的以太网卡;如图2.所示..9.10. 图2.设置MWSMART应用程序访问点11. ping指令确认电脑是否和CPU物理连接正常12. 注意:电脑的IP地址需要和CPU的IP地址在同一网段13. 如果ping结果显示类似如下图3.;表示物理连接没有问题..14.15. 图3.ping物理连接正常16. 如果ping结果显示如下图4.;则要检查IP地址设置和网线;电脑网卡及CPU网络接口..17.18. 图4.ping物理连接不正常19. 检查360安全卫士、金山卫士以及管家等软件是否对操作系统的启动进程进行了优化设置;是否禁用了西门子软件所需的应用进程..20. 图5.中PNIOMGR进程不能被禁用;如果禁用将导致搜索不到S7-200SMARTCPU..需要恢复启动该进程;并重启再次电脑测试..21.22. 图5.PNIOMGR进程被禁用23.24. 另外;我们也可以手动启动该进程;然后在测试能否搜索到S7-200SMARTCPU;如图6.所示..PNIOMGR进程默认存放路径C:\ProgramFiles\CommonFiles\Siemens\SimNetComWindowsXP操作系统25. 或C:\ProgramFiles\CommonFiles\Siemens\Automation\SimaticOAM\binWindowsWIN7操作系统..26.27. 图6.手动启动PNIOMGR进程28. 在计算机管理的服务中;找到SIMATICS7DOSHELPSERVICE或者S7DOSHELPSERVICE等服务;需要确保该服务为自动状态并且已经启动;如图7.所示..29.30. 图7.S7DOSHELPSERVICE需要被启动31. 检查以上步骤;如果依然查找不到CPU;如果已经知道CPUIP地址的情况下;可以通过直接添加CPU的IP地址的方式来连接;如图8.所示..32.33. 图8.添加CPU方式34. 以上方法都无法奏效的情况下;可以考虑更换操作系统或者电脑测试..RS485端口无法搜索到CPU怎么办S7-200SMARTV2.3CPU系列包含十二种CPU型号;分为两条产品线:紧凑型产品线和标准型产品线..紧凑型CPU四种:CPUCR20s、CPUCR30s、CPUCR40s和CPUCR60s;V2.3版本不适用于CR40和CR60CPU;即CR40和CR60的CPU固件版本只到V2.2版本;V2.3版本CPU中不包含..标准型CPU八种:STST20、ST30、ST40、ST60和SRSR20、SR30、SR40、SR60 S7-200SMART编程软件及CPU固件;从V2.3开始支持通过RS485端口使用USB-PPI 订货号:6ES7901-3DB30-0XA0编程电缆下载程序的功能..紧凑型CPU无以太网端口;仅CPU本体集成一个RS485端口;此端口作为CPU的唯一编程端口..使用STEP 7Micro/WIN SMART和USB-PPI电缆可以进行上传和下载程序、监控程序、执行固件更新..紧凑型CPU没有microSD读卡器或任何与使用microSD卡相关的功能;不支持使用microSD卡..标准型CPU各个固件版本均支持使用以太网端口进行下载程序;如果通过RS485端口使用USB-PPI电缆下载程序;需要保证编程软件及CPU固件版本均在V2.3及以上..通过RS485端口使用USB-PPI电缆下载程序;搜索不到CPU按照如下步骤进行检查:1.S7-200SMARTV2.3编程软件;首次安装完成后;必须要重启电脑;然后再使用软件操作..2.关闭杀毒软件3.检查是否满足使用编程软件通过RS485端口进行下载程序的前提条件:a、编程软件使用V2.3及以上版本..b、要更新固件的硬件;实际固件版本为V2.3或更高版本的模块的固件..c、如果使用编程电缆需要使用USB-PPI电缆;订货号:6ES7901-3DB30-0XA0;不支持使用RS232/RS485编程电缆更新固件;订货号:6ES7901-3CB30-0XA0..1.所示:表1.CPU类型及下载程序方法X:表示支持--:表示不支持C:表示固件版本在V2.3及以上支持5.检查操作步骤是否正确或者有遗漏;参考文档:如何下载6.使用第三方编程电缆无法保证通信效果常见问题标准型CPU使用USB-PPI电缆可以搜索到CPU;下载时报错“CPU不支持该功能”首先标准型CPU在任何固件版本都支持使用以太网口进行编程下载程序;如果使用USB-PPI电缆下载程序出现报错;使用以太网线连接PLC;查看PLC信息;检查CPU实际固件版本..如果是不是V2.3版本;使用存储卡升级固件到V2.3及以上;才可以使用USB-PPI电缆下载程序..否则有可能出现上图报错..CPU实际固件在V2.3及以上;但是在虚拟机中使用USB-PPI电缆搜索不到CPU1、安装完毕编程软件后;需要重启电脑后;再使用编程软件2、检查是否与虚拟机设置相关;参考链接:PCAdapterUSBA2在虚拟机中的连接;保证插接电缆后;电脑可以识别到USB-PPI电缆提醒注意;参考链接旨在提供虚拟机中设置;实际S7-200SMART使用RS485端口下载;编程电缆只能使用USB-PPI电缆;订货号:6ES7901-3DB30-0XA0;不能使用PCAdapter或者PCAdapterUSBA2。
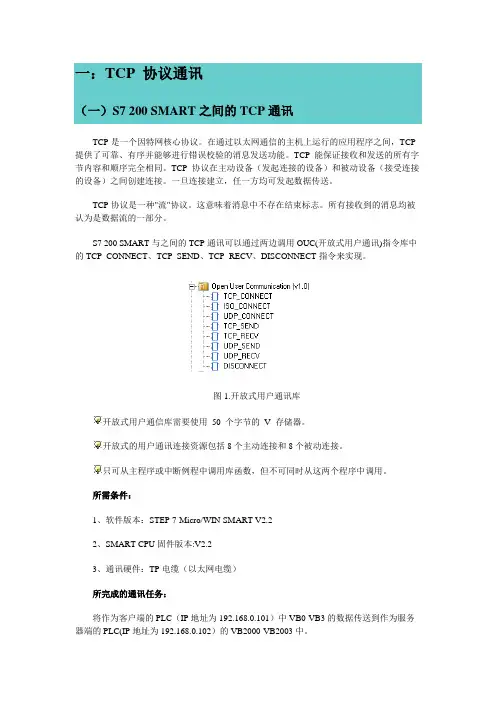
一:TCP 协议通讯(一)S7 200 SMART之间的TCP通讯TCP是一个因特网核心协议。
在通过以太网通信的主机上运行的应用程序之间,TCP 提供了可靠、有序并能够进行错误校验的消息发送功能。
TCP 能保证接收和发送的所有字节内容和顺序完全相同。
TCP 协议在主动设备(发起连接的设备)和被动设备(接受连接的设备)之间创建连接。
一旦连接建立,任一方均可发起数据传送。
TCP协议是一种"流"协议。
这意味着消息中不存在结束标志。
所有接收到的消息均被认为是数据流的一部分。
S7 200 SMART与之间的TCP通讯可以通过两边调用OUC(开放式用户通讯)指令库中的TCP_CONNECT、TCP_SEND、TCP_RECV、DISCONNECT指令来实现。
图1.开放式用户通讯库开放式用户通信库需要使用50 个字节的V 存储器。
开放式的用户通讯连接资源包括8个主动连接和8个被动连接。
只可从主程序或中断例程中调用库函数,但不可同时从这两个程序中调用。
所需条件:1、软件版本:STEP 7-Micro/WIN SMART V2.22、SMART CPU固件版本:V2.23、通讯硬件:TP电缆(以太网电缆)所完成的通讯任务:将作为客户端的PLC(IP地址为192.168.0.101)中VB0-VB3的数据传送到作为服务器端的PLC(IP地址为192.168.0.102)的VB2000-VB2003中。
S7-200 SMART 客户端编程1、设置本机IP地址在客户端设置IP地址为192.168.0.101图2.设置IP地址2、建立TCP连接调用TCP_CONNECT指令建立TCP连接。
设置连接伙伴地址为192.168.0.102,远端端口为2001,本地端口为5000,连接标识ID为1。
利用SM0.0使能Active,设置为主动连接。
图3.调用TCP_CONNECT指令指令的参数输入参数:EN :使能输入Req:沿触发Active :TURE=主动连接(客户端)FALSE=被动连接(服务器)ConnID:连接ID为连接标识符,可能范围为0-65534。
【智】S7-200SMART运动控制指令详解带你启程!大家好,我是微控小智,今天又跟大家见面了。
学习需要坚持,做技术亦是如此,厚积才能博发。
小智写的程序都是进行反复测试过的,可以放心跟着操作,有疑问的地方可以留言。
S7-200SMART运动控制指令由编程软件向导生成,运动控制指令有很多条构成,且每条指令都带有很多接口参数,要想使用这些指令,先要知道接口是什么意思,虽然帮助文章都有解释,但读懂帮助文件也很费劲,那么今天,小智就来给大家介绍一下常用的S7-200SMART运动控制指令。
S7-200SMART运动控制指令向导如下图所示:1.启用并初始化轴AXISx_CTRL子程序(控制)启用和初始化运动轴,方法是自动命令运动轴每CPU更改为RUN模式时加载组态/曲线表。
在项目中只对每条运动轴使用此子程序一次,并确保程序会在每次扫描时调用此子程序。
使用SM0.0(始终开启)作为EN参数的输入。
管脚含义:MODE:启用模块。
1=可发送命令;0=中止进行中的任何命令Done:完成标志位Error:错误代码(字节)C_Pos:轴的当前位置(绝对定位或者相对定位),工程单位:Real型数据;相对脉冲:DINT型数据C_Speed:轴的当前速度,Real型数据C_Dir:轴的当前方向(1=反向,0=正向)2.手动控制轴AXISx_MAN子例程(手动模式)将运动轴置为手动模式。
这允许电机按不同的速度运行,或沿正向或负向慢进。
在同一时间仅能启用RUN、JOG_P或JOG_N输入之一。
管脚含义:RUN:1=轴手动运行(速度和方向分别由Speed和Dir管脚控制)0=停止手动控制JOG_P:1=正转点动控制JOG_N:1=反转点动控制Speed:RUN运行时的目标速度,Real型数据Dir:RUN运行时的方向Error:错误代码(字节)C_Pos:轴当前位置(绝对定位或者相对定位),工程单位:Real型数据;相对脉冲:DINT型数据C_Speed:轴当前速度,Real型数据C_Dir:轴的当前方向(1=反向,0=正向)3.绝对或者相对定位AXISx_GOTO子程序命令运动轴转到所需位置。
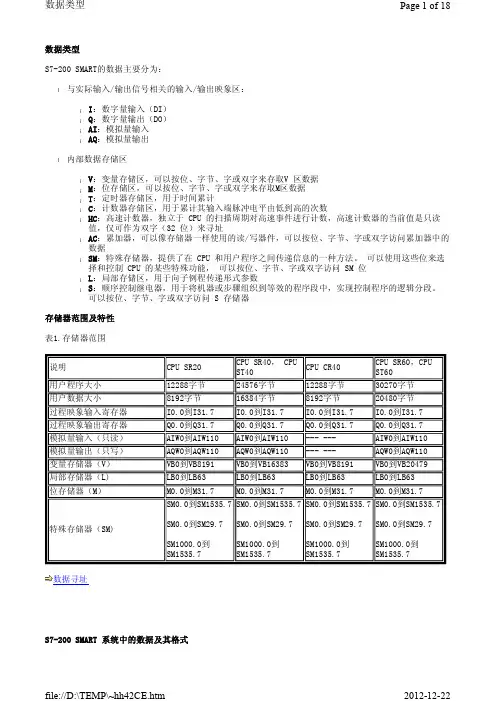
数据类型S 7-200 S M A R T 的数据主要分为:l与实际输入/输出信号相关的输入/输出映象区:¡I :数字量输入(D I )¡Q :数字量输出(D O ) ¡A I :模拟量输入 ¡A Q :模拟量输出l内部数据存储区¡V :变量存储区,可以按位、字节、字或双字来存取V 区数据¡M:位存储区,可以按位、字节、字或双字来存取M 区数据 ¡T :定时器存储区,用于时间累计 ¡C :计数器存储区,用于累计其输入端脉冲电平由低到高的次数 ¡H C :高速计数器,独立于 C P U 的扫描周期对高速事件进行计数,高速计数器的当前值是只读值,仅可作为双字(32 位)来寻址 ¡A C :累加器,可以像存储器一样使用的读/写器件,可以按位、字节、字或双字访问累加器中的数据 ¡SM :特殊存储器,提供了在 C P U 和用户程序之间传递信息的一种方法。
可以使用这些位来选择和控制 C P U 的某些特殊功能, 可以按位、字节、字或双字访问 S M 位 ¡L :局部存储区,用于向子例程传递形式参数¡S:顺序控制继电器,用于将机器或步骤组织到等效的程序段中,实现控制程序的逻辑分段。
可以按位、字节、字或双字访问 S 存储器存储器范围及特性 表1.存储器范围 数据寻址S7-200 SMART 系统中的数据及其格式说明C P U S R 20 C P U S R 40, C P US T 40 C P U C R 40C P U S R 60,C P US T 60 用户程序大小 12288字节 24576字节 12288字节 30270字节 用户数据大小 8192字节 16384字节 8192字节 20480字节 过程映象输入寄存器 I 0.0到I 31.7 I 0.0到I 31.7 I 0.0到I 31.7 I 0.0到I 31.7 过程映象输出寄存器 Q 0.0到Q 31.7 Q 0.0到Q 31.7 Q 0.0到Q 31.7 Q 0.0到Q 31.7 模拟量输入(只读) A I W 0到A I W 110 A I W 0到A I W 110 --- --- A I W 0到A I W 110 模拟量输出(只写) A Q W 0到A Q W 110 A Q W 0到A Q W 110 --- --- A Q W 0到A Q W 110 变量存储器(V ) V B 0到V B 8191 V B 0到V B 16383 V B 0到V B 8191 V B 0到V B 20479 局部存储器(L ) L B 0到L B 63 L B 0到L B 63 L B 0到L B 63 L B 0到L B 63 位存储器(M )M 0.0到M 31.7M 0.0到M 31.7M 0.0到M 31.7M 0.0到M 31.7特殊存储器(S M )S M 0.0到S M 1535.7 S M 0.0到S M 29.7 S M 1000.0到S M 1535.7S M 0.0到S M 1535.7 S M 0.0到S M 29.7 S M 1000.0到S M 1535.7S M 0.0到S M 1535.7 S M 0.0到S M 29.7 S M 1000.0到S M 1535.7S M 0.0到S M 1535.7S M 0.0到S M 29.7 S M 1000.0到S M 1535.7S7-200S M A R T C P U收集操作指令、现场状况等信息,把这些信息按照用户程序指定的规律进行运算、处理,然后输出控制、显示等信号。

SIMATICS7-200 SMART2013 年 10 月版 S7-200 SMART 系统手册更新信息产品信息S7-200 SMART 文档更新概述尽管我们力求确保产品文档条理清楚与准确无误,但《S7-200 SMART 系统手册》中的一些页面仍包含不完整、不正确或误导性的信息。
使用 AXISx_ABSPOS 子例程从 SINAMICS V90 伺服驱动器读取绝对位置以下几部分提供了如何在项目中使用 AXISx_ABSPOS 子例程从 SINAMICS V90 伺服驱动器读取绝对位置的更多信息:●AXISx_ABSPOS 子例程 (页 1)●用法示例 (页 3)●互连详细信息 (页 4)●影响互操作性的调试问题 (页 4)AXISx_ABSPOS 子例程当您在“从驱动器读取绝对位置”(Read Absolute Position from Drive) 对话框中选中“启用”(Enabled) 复选框并单击“生成”(Generate) 按钮以构建向导生成的子例程时,STEP 7-Micro/WIN SMART 的运动控制向导将创建 AXISx_ABSPOS 子例程。
© Siemens AG 2013. 保留所有权利AXISx_ABSPOS 子例程的接口和参数说明如下所示:输入/输出数据类型2013 年 10 月版 S7-200 SMART 系统手册更新信息AXISx_ABSPOS 和 AXISx_LDPOS 子例程用法示例在 START 参数开启的情况下执行 AXISx_ABSPOS 子例程时,仅当成功完成该子例程后(Done 参数 = ON 且 Error 参数=“无错误”),绝对位置才有效。
在 START 输入关闭的情况下执行子例程时,由于 Error 和 D_Pos 参数会恢复为默认值,因此在完成子例程后,您必须将指令包含在您的程序中,以捕获有效的绝对位置值。
2013 年 10 月版 S7-200 SMART 系统手册更新信息互连数字量 I/O请参见SINAMICS V90/SIMOTICS S-1FL6 操作说明文档中的“PLC 连接示例”部分,以查找有关 S7-200 SMART CPU 和 V90 伺服驱动器之间的数字量控制信号连接的建议接线图。
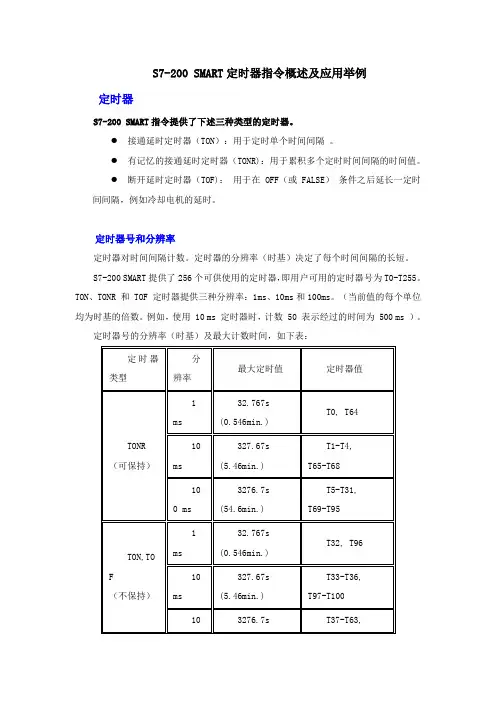
S7-200 SMART定时器指令概述及应用举例定时器S7-200 SMART指令提供了下述三种类型的定时器。
●接通延时定时器(TON):用于定时单个时间间隔。
●有记忆的接通延时定时器(TONR):用于累积多个定时时间间隔的时间值。
●断开延时定时器(TOF):用于在 OFF(或 FALSE)条件之后延长一定时间间隔,例如冷却电机的延时。
定时器号和分辨率定时器对时间间隔计数。
定时器的分辨率(时基)决定了每个时间间隔的长短。
S7-200 SMART提供了256个可供使用的定时器,即用户可用的定时器号为T0-T255。
TON、TONR 和 TOF 定时器提供三种分辨率:1ms、10ms和100ms。
(当前值的每个单位均为时基的倍数。
例如,使用 10 ms 定时器时,计数 50 表示经过的时间为 500 ms )。
定时器号的分辨率(时基)及最大计数时间,如下表:表1. 定时器号和分辨率定时器号决定了定时器的分辨率(时基),并且分辨率在指令块上标出。
注意:同一个定时器编号不能同时用于 TON 和 TOF 定时器。
例如,不能同时使用 TON T32和 TOF T32。
不同分辨率的定时器按以下规律刷新:❖1ms:1ms分辨率的定时器,定时器位和当前值的更新不与扫描周期同步。
对于大于1ms的程序扫描周期,在一个扫描周期内,定时器位和当前值刷新多次。
❖10ms:10ms分辨率的定时器,定时器位和当前值在每个程序扫描周期的开始刷新。
定时器位和当前值在整个扫描周期过程中为常数。
在每个扫描周期的开始会将一个扫描累计的时间间隔加到定时器的当前值上。
❖100ms:100ms分辨率的定时器,定时器位和当前值在指令执行时刷新。
因此为了保证正确的定时值,要确保在一个程序扫描周期中,只执行一次100ms定时器指令。
注意:要确保最小时间间隔,请将预设值 (PV) 增大 1。
例如:使用 100 ms 定时器时,为确保最小时间间隔至少为 2100 ms,则将 PV 设置为22。
模块一S7-200 SMART PLC基本指令的应用任务1.1 答案1.填空题(1)计算机(Computer)技术、控制(Control)技术、通信(Communication)技术(2)整体式、模块式(3)CPU(中央处理器)、存储器、输入/输出(I/O)接口电路、电源、外部设备接口、I/O(输入/输出)扩展接口(4)继电器输出、晶体管输出、晶闸管输出(5)循环扫描,输入采样、程序执行和输出刷新(6)20点、30点、40点、60点;经济型、标准型(7)漏型、源型(8)36、24(9)60(10)3、1002.选择题(1)B (2)B (3)A、B (4)A (5)C3.分析题(1)S7-200 SMART PLC的数字量输入端不可以同时接NPN和PNP两种传感器。
(2)继电器输出型的PLC既可以带直流负载,也可以带交流负载;晶体管输出型的PLC只能带直流负载。
(3)S7-200 SMART晶体管输出型PLC的数字量输出端不可以接漏型设备。
(4)有一台CPU SR40的PLC,控制一只DC24V的电磁阀和一只AC 220V的接触器线圈,PLC的输出端如何接线?任务1.2 答案1.填空题(1)Windows XP SP3(仅32位)、Windows 7(32位和64位)(2)组织编辑项目、提供指令(3)注释、变量的状态、硬件组态、设置通信2.分析题(1)硬件组态的任务就是用系统块生成一个与实际硬件系统相同的系统。
硬件组态包括CPU型号、扩展模块、信号板的添加以及它们相关参数的设置。
(2)按“仅绝对”地址、“符号:绝对”地址和“仅符号”地址来显示参数。
(3)①网线是否连接好。
检查网络电缆是否连接好,在CPU本体左上角以太网接口处有“以太网状态”指示灯“LINK”,此灯常亮表示以太网连接成功。
②检查编程设备的IP地址是否与CPU的IP地址在同一网段中。
编程设备必须与CPU在同一网段中。
S7-200 SMART CPU预置的IP地址为:192.168.2.1。
存储卡S7-200S M A R T C P U支持商用M i c r o S D卡(支持容量为4G,8G,16G):可用于程序传输,C P U固件更新,恢复 C P U出厂设置。
打开C P U本体数字量输出点上方的端子盖,可以看到右侧有一卡槽,将M i c r o S D卡缺口向里插入,如图 1所示:图 1.插入M i c r o S D卡使用 M i c r o S D卡传送程序制作程序传输卡:步骤一:用户在 C P U上电且停止状态下插入存储卡;注意:用户也可以在C P U断电状态下插入一张空的存储卡然后再将 C P U上电,但是需要注意的是存储卡必须确实是空的而不是旧的固件更新卡或者是程序传输卡。
否则可能会更改 C P U固件或者是内部存储的项目。
步骤二:下载源程序到C P U(如果C P U中已经存在源程序则不需此步);步骤三:在 M i c r o/W I N S M A R T中,点击“P L C”->“编程存储卡” ,打开“编程存储卡”对话框,选择需要被拷贝到存储卡上的块,点击“编程”按钮,如图2所示;图 2.编程存储卡步骤四:当 M i c r o/W I N S M A R T显示编程操作成功执行时(“编程存储卡”对话框显示编程成功,点击“关闭”)如图3所示,从C P U上取下存储卡。
图 3.编程存储卡成功注意:在 M i c r o/W I N S M A R T中进行“编程存储卡”操作时,是将C P U中存储的程序拷贝至C P U,而非软件中打开的程序。
所以必须先将程序下载到C P U中,才能执行“编程存储卡”操作。
使用已制作好的程序传输卡拷贝项目到另一个 C P U:步骤一:在 C P U断电状态下插入存储卡;步骤二:给 C P U上电,C P U会自动识别存储卡为程序传输卡并且自动将其中的内容复制到 C P U内部存储器,传输过程中R U N指示灯和 S T O P 指示灯以 2H Z的频率交替点亮;步骤三:当 C P U只有 S T O P灯开始闪烁,表示“程序传送”操作成功,则从 C P U上取下存储卡。