步进梁式加热炉的自动控制
- 格式:pdf
- 大小:170.16 KB
- 文档页数:2
三轧钢生产过程自动化控制系统运行情况介绍一. 仪表自动化1.1.主要控制功能●燃烧控制加热炉采用工艺先进的双蓄热步进粱式加热炉,燃料为高炉煤气,加热工艺设计采用空气、煤气双蓄热燃烧技术,两段温度控制,该技术对仪表检测控制提出了较高的要求,全新的控制策略和方法为传统的控制模式无法胜任,唯有计算机系统才能完成控制要求,仪表自动化的设计应以提高检测精度、保证合理燃烧及安全性为核心。
在设备选型上,坚固可靠性及先进性,对于关键性的设备,采用国外引进产品或合资产品,国内设备部分也选用性能价格比高的产品。
两段的炉温控制均由交叉限幅燃烧控制系统来实现。
每个炉温段设有热电偶,在线检测炉温。
燃烧控制系统还根据最大加温速率对温度控制器输出值进行限制,以免过热。
该控制系统中,引入了流量系统系数的修正和热空气流量温度补正,以提高控制精度。
●炉膛压力、排烟温度控制于蓄热式加热炉每隔30—90秒左右需换一次向,换向期间煤气被顺序切断,这样便会对炉膛的压力产生一定的影响;对排烟温度也会产生影响;由于加热炉各段之间不可能完全隔断,在对某段的某一热工参数进行控制时必然也会对其他段的热工参数产生较大的影响。
设计采用根据测得的炉顶压力,调节排烟阀实现炉膛压力和排烟精确控制,控制两段炉顶炉压在+30Pa(允许波动范围10Pa)。
●加热炉温度控制基于本家热炉的工艺特点,此类型的加热炉炉膛温度控制相当复杂,为了实现炉膛温度精确控制,除采用交叉限幅燃烧系统控制外还才取了以下措施:a) 在加热炉换向期间,为了避免空气和煤气调节阀作无用的动作以及提高调节阀的使用寿命,采用了间歇控制,即在换向期间,预置相关空气和煤气调节阀保持换向前的开度不变;b) 同时采用自学习和预测控制技术,即计算机系统根据以前收集的数据和目前炉子的工况确认空气和煤气调节阀开度并进行实时校正。
这样在换向完成后,系统能在最段的时间内恢复到正常的燃烧控制状态。
●换向阀控制换向系统具有灵活的手动、半自动、全自动控制功能。
步进式加热炉步进机构的控制步进式加热炉是一种常用的加热设备,具有温度控制精确、加热速度快等优点。
步进机构是步进式加热炉的重要部件之一,用于控制加热炉内工件的前进和后退,确保工件加热均匀。
下面介绍步进式加热炉步进机构的控制方法。
一、步进机构简介步进机构是由步进电机、二相步进驱动器和螺旋杠机构组成的。
步进电机是一种控制精度高、速度快的电机,可分为二相步进电机和三相步进电机。
在步进机构中,二相步进电机应用最广泛。
二相步进驱动器是用来驱动二相步进电机的电路,可实现步进电机的正反转、快慢速等控制功能。
螺旋杠机构是用来实现步进机构的输送功能,主要有直线导轨、万向节等结构。
二、步进机构控制原理步进机构的控制原理是通过二相步进驱动器控制步进电机,使步进电机按照一定步距前进或后退,从而带动螺旋杠机构带动工件前进或后退。
步进机构的控制是离散的,即控制的单位是固定的步数。
为了实现步进机构的精确控制,需要根据工件的特点合理设计步距。
1、手动控制手动控制方式是一种简单易行的步进机构控制方式。
通过手动转动步进电机的轴心实现前进或后退,可调节步距和前进速度。
手动控制操作简单,但是精度低,不适合精细加工操作。
2、脉冲数字控制脉冲数字控制是一种最基本的步进机构控制方法。
这种控制方式通过驱动器产生一系列固定频率的脉冲信号,控制步进电机的前进或后退。
这种控制方式精度高、速度快,适合大批量标准化加工操作。
但是由于控制方式单一,不适合处理非线性运动。
3、位置闭合环控制位置闭合环控制是一种实时监测步进机构位置变化的控制方式。
该控制方式可以通过编码器实时监测加热炉温度、步进电机位置等参数,根据参数进行调整控制步进机构的前进或后退。
这种控制方式精度高,适用于非标准化加工操作。
四、总结步进式加热炉步进机构的控制是实现加热炉精准加热的关键环节之一。
在实际应用中,应根据工件加工的特点选择相应的控制方式,以提高加工工作效率和精度。
未来随着人工智能技术和机器学习等技术的发展,步进机构的控制方式将更加智能化和自动化。
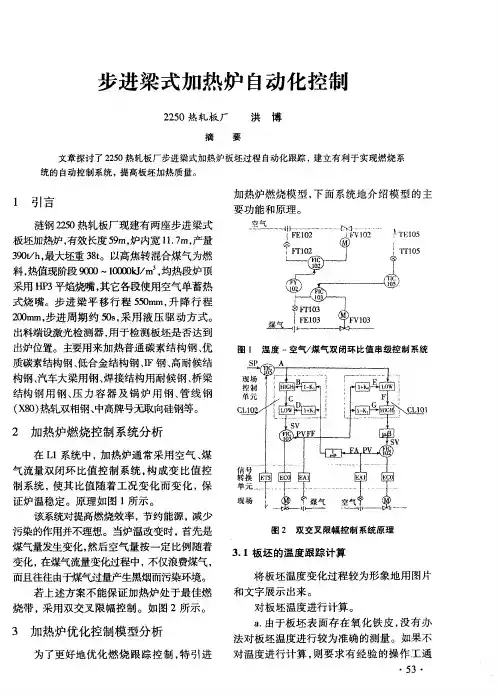
内蒙古科技大学过程控制课程设计论文题目:步进式加热炉炉温过程控制系统设计学生姓名:罗成庆学号:1067112304专业:测控技术与仪器班级:测控10-3班指导教师:闫俊红加热炉炉温过程控制系统设计的意义加热炉作为钢铁工业轧钢生产线的关键设备和能耗设备,其自动化控制水平直接影响到能耗、烧损率、废钢率、产量、质量等指标。
随着自动化技术的迅猛发展,如何采用先进的自动化控制技术与设备,提高基础自动化控制效果与水平,确保钢坯的加热质量、实现高效节能、减少污染是本文研究的意义所在。
随着工业自动化技术的不断发展,现代化的轧钢厂应该配置大型化的、高度自动化的步进梁式加热炉,其生产应符合高产、优质、低耗、节能、无公害以及生产操作自动化的工艺要求,以提高其产品的质量,增强产品的市场竞争力。
本文主要研究的内容是炉膛温度控制系统,采用串级控制系统通过控制空燃比来达到控制温度的效果。
关键词:步进式加热炉;炉膛温度控制;控制方法前言加热炉不仅是轧线上最重要的设备之一,而且也是耗能大户。
钢坯加热的技术直接影响带钢产品的质量、能源消耗和轧机寿命。
因此加热炉优化设定控制技术的推广对钢铁企业意义重大。
加热炉的生产目的是满足轧制要求的钢坯温度分布,并实现钢坯表面氧化烧损最少和能耗最小。
由于加热炉具有非线性、不确定性、耦合等特点,其动态特性很难用数学模型加以描述,因此采用经典的优化控制方法难以收到理想的控制效果,只能依靠操作人员凭经验控制底层回路设定值,当工况发生变化时,往往使工艺指标实际值偏离目标值范围,造成产品质量下降,消耗增加。
目录第一章加热炉控制系统概述 ............................... 错误!未定义书签。
1.1步进式加热炉的发展和国内概况 ............. 错误!未定义书签。
1.2炉温控制基本原理 ..................................... 错误!未定义书签。

步进炉自动控制系统的设计摘要:目前,工业控制自动化技术正朝着智能化、网络化和集成化的方向发展。
通过步进梁式加热炉系统的设计,体现了当今自动化技术的发展方向。
同时介绍了软件设计思想、脉冲燃烧控制技术的特点及其在该系统中的应用。
1导言加热炉是轧钢行业必备的热处理设备。
随着工业自动化技术的不断发展,现代轧机应配备大型化、高度自动化的步进梁式加热炉,其生产应满足高产、优质、低耗、节能、无污染和生产操作自动化的工艺要求,以提高产品质量,增强市场竞争力。
中国轧钢行业的加热炉有两种:推钢炉和步进梁式炉。
然而,推钢炉长度短,产量低,烧损高。
操作不当会导致生产出现问题,难以实现管理自动化。
由于推钢炉有不可克服的缺点,步进梁炉依靠一种特殊的步进机构,使钢管在炉内做直角运动,钢管之间留有间隙,钢管与步进梁之间没有摩擦。
出炉的钢管通过提升装置卸出,完全消除了滑痕。
钢管加热段温差小,加热均匀,炉长不受限制,产量高,生产操作灵活。
其生产符合高产、优质、低耗、节能的特点。
全连续全自动步进梁式加热炉。
这种生产线具有以下特点: ①生产能耗大大降低。
②产量大幅增加。
③生产自动化水平很高。
原加热炉的控制系统多为单回路仪表和继电器逻辑控制系统,传动系统多为模拟量控制的电源装置。
现在加热炉的控制系统都是PLC或者DCS系统,大部分还有二级过程控制系统和三级生产管理系统。
传输系统都是数字DC或交流电源设备。
本项目是某钢铁集团新建的φ180小直径无缝连续钢管生产线热处理线上的一台步进梁式加热炉。
2流程描述该系统的工艺流程图如图1所示。
图1步进梁式加热炉工艺流程图淬火炉和回火炉都是步进梁式加热炉。
装载方式:侧进侧出;炉布:单排。
活动梁和固定梁由耐热铸钢制成,顶面有齿形面,钢管直径小于141.3毫米,每个齿槽内放置一根钢管。
每隔一颗牙放一根直径153.7mm的钢管。
活动横梁升降180mm,上下90mm,节距190mm,间隔145mm。
因此,每走一步,钢管都可以旋转一个角度,使钢管受热均匀,防止炉内弯曲变形。
步进式加热炉步进机构的控制步进式加热炉是工业生产中常见的加热设备,步进机构是步进式加热炉的重要组成部分,对步进机构的控制直接影响到加热炉的加热效果和工作稳定性。
本文将就步进式加热炉步进机构的控制进行详细介绍。
一、步进机构的结构与工作原理步进机构是步进式加热炉中用于控制加热器位置和加热时间的重要组件,通常由电机、减速器和控制装置组成。
1. 电机:电机是步进机构的动力源,通常采用步进电机或直流电机,步进电机具有精确的定位功能,可以按照设定的步长精确移动,适用于对位置控制要求较高的场合;直流电机则具有更大的扭矩和速度范围,适用于对动力要求较大的场合。
2. 减速器:减速器用于降低电机的输出速度,提高扭矩输出,使步进机构能够更精确地控制加热器的位置。
常见的减速器有齿轮减速器和带轮减速器,选择合适的减速比可以满足步进机构的运动需求。
3. 控制装置:控制装置是步进机构的大脑,它能够接收外部信号,根据设定的参数控制电机的转动,实现对加热器位置和加热时间的精确控制。
控制装置通常采用PLC或单片机,具有良好的稳定性和可靠性。
步进机构的工作原理是通过控制电机的转动实现加热器的精确移动,以及对加热时间的精确控制,从而实现对加热炉加热过程的精确控制。
二、步进机构的控制方式步进机构的控制方式可以分为开环控制和闭环控制两种。
1. 开环控制:开环控制是指控制装置只能按照设定的参数控制电机的转动,无法实时反馈加热器的位置信息。
开环控制结构简单,成本低,但无法对电机的实际位置进行实时调整,容易受到外界因素的影响。
在实际应用中,根据加热炉的要求和工作环境的特点,可以选择合适的步进机构控制方式,以确保加热炉的稳定加热和工作效率。
步进机构的控制参数包括电机的步数、速度和加速度等。
1. 步数:步数是指电机转动一圈的步长,步数越大,加热器的精确移动能力越强。
在不同的加热炉工作环境中,可以根据加热器位置的要求选择合适的步数,以实现精确控制。
2. 速度:步进机构的速度直接影响到加热炉的加热效率,速度过快会导致加热器位置不稳定,速度过慢则会影响加热效果。
822022年1月上 第01期 总第373期工艺设计改造及检测检修China Science & Technology Overview收稿日期:2021-11-09作者简介:刘颖杰(1995―),男,满族,河北唐山人,本科,助理工程师,研究方向:热轧卷板自动化控制。
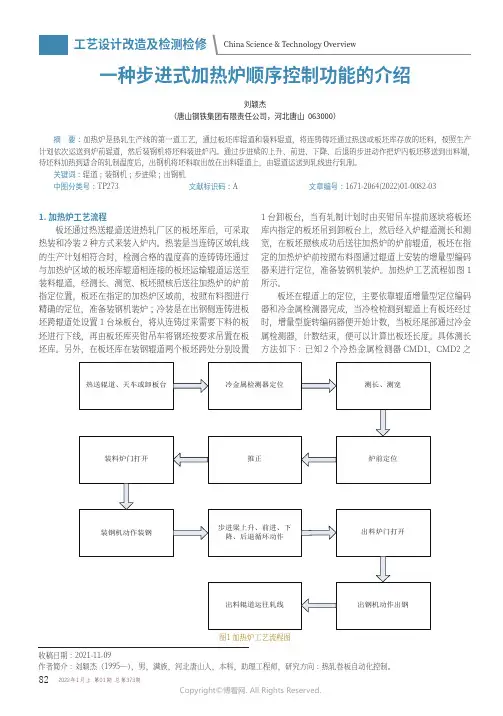
一种步进式加热炉顺序控制功能的介绍刘颖杰(唐山钢铁集团有限责任公司,河北唐山 063000)摘 要:加热炉是热轧生产线的第一道工艺,通过板坯库辊道和装料辊道,将连铸铸坯通过热送或板坯库存放的坯料,按照生产计划依次运送到炉前辊道,然后装钢机将坯料装进炉内。
通过步进梁的上升、前进、下降、后退的步进动作把炉内板坯移送到出料端,待坯料加热到适合的轧制温度后,出钢机将坯料取出放在出料辊道上,由辊道运送到轧线进行轧制。
关键词:辊道;装钢机;步进梁;出钢机图1 加热炉工艺流程图工艺设计改造及检测检修China Science & Technology Overview间距离为L1,板坯库测长辊道上装有增量型编码器PLG。
编码器用于计算板坯行走的距离,冷金属检测器是用来检测板坯的头部和尾部所在的位置。
板坯沿着辊道由CMD1向CMD2方向运动,当板坯的头部经过CMD2时,编码器的高速计数模板采集的脉冲数就会被清零,这样随着板坯的持续通过,板坯的长度增长与采集的脉冲数成正比,当CMD1检测到板坯尾部位置时记下编码器读数P1,通过收集的脉冲数就可计算板坯的长度为:L=L1+P1*K1,其中,L为板坯长度,L1为冷热金属检测器CMD1和CMD2之间的距离,P1为增量型编码器PLG的计数值,K1为脉冲折算系数,可以由辊径、脉冲数、减速比计算,也可以实际测算。
板坯的测宽方法,主要依靠板坯库辊道两侧的激光测距仪来完成的[1]。
板坯到达装料辊道后,如果冷金属检测器检测到炉前没有板坯,且装钢机在原位,则装料辊道启动,继续将板坯运往炉侧。
到达炉侧以后,将启动炉前定位功能,通过冷金属检测器CMD和增量型编码器PLG的组合,根据二级下发的坯料长度数据L1,当金属检测器CMD检测到板坯尾部时,增量型编码器PLG开始计数,同时辊道开始减速,待到板坯定位完成后,辊道完全停止,L2=(L‒L1)/2+L0,其中,L为加热炉炉内的宽度,L0为冷金属检测器CMD到炉子炉墙墙的距离,L1为坯料的长度,L2为冷金属检测器CMD到坯料尾部的距离。
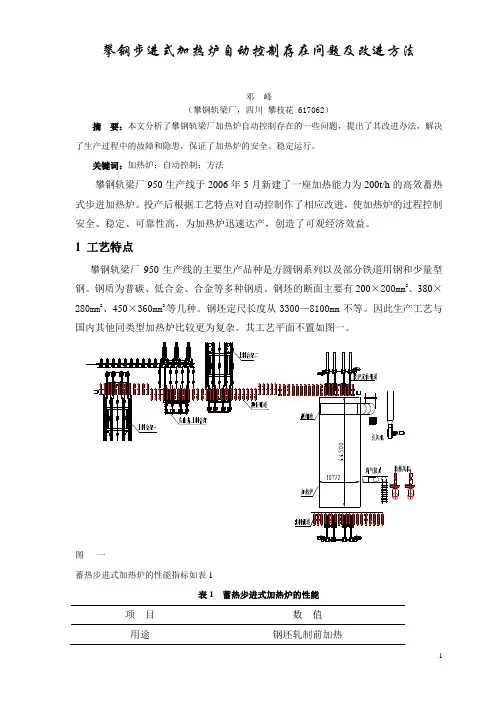
攀钢步进式加热炉自动控制存在问题及改进方法邓峰(攀钢轨梁厂,四川攀枝花 617062)摘要:本文分析了攀钢轨梁厂加热炉自动控制存在的一些问题,提出了其改进办法,解决了生产过程中的故障和隐患,保证了加热炉的安全、稳定运行。
关键词:加热炉;自动控制;方法攀钢轨梁厂950生产线于2006年5月新建了一座加热能力为200t/h的高效蓄热式步进加热炉。
投产后根据工艺特点对自动控制作了相应改进,使加热炉的过程控制安全、稳定、可靠性高,为加热炉迅速达产,创造了可观经济效益。
1 工艺特点攀钢轨梁厂950生产线的主要生产品种是方圆钢系列以及部分铁道用钢和少量型钢。
钢质为普碳、低合金、合金等多种钢质。
钢坯的断面主要有200×200mm2、380×280mm2、450×360mm2等几种。
钢坯定尺长度从3300—8100mm不等。
因此生产工艺与国内其他同类型加热炉比较更为复杂。
其工艺平面不置如图一。
图一蓄热步进式加热炉的性能指标如表1表1 蓄热步进式加热炉的性能项目数值用途钢坯轧制前加热加热钢种碳结钢、优质碳结钢、低合金钢、合金等钢炉子产量/(t.h-1)额定 200燃料种类混合煤气燃料发热值/(kJ.Nm-3) 1800×4.18煤气消耗量/ (Nm3 .h-1) 30025空气消耗量/ (Nm3 .h-1) 60050炉底强度/(Kg.m-2.h-1) 583步进行程(mm) 升降200;水平600以下可调步进周期/(s) 46钢坯出炉温度/(℃) 1200冷却方式水冷2 存在的主要问题分析2.1 装钢行程不准确问题分析装钢的距离不准确,造成钢坯间距不等,而且将所有的钢坯在装炉时的间距都定为100mm,也不合理,这对正常加热不同的钢坯影响较大,也不便于判断装钢位是否有钢。
通过调查认为产生这种状况的原因是:第一,钢坯的断面较小,测宽时偏差较大,第二,推正后后退到钢坯端面内50mm,存在误差;第三,托杆的实际行程也存在误差,这些误差累积在一起,当装了几支钢后,装钢位的前一支钢距装料端砌砖线的位置计算就存在偏差,因此再装钢距离也就不准确。
西门子S7—400在安钢炉卷轧线步进梁式加热炉电气自动化方面的应用【摘要】对安钢炉卷轧线步进梁式加热炉的自动化控制进行分析。
介绍通过使用S7-400PLC硬件以及编程技术,到达在热轧生产线中,对钢坯加热的工艺要求。
【关键词】步进梁式加热炉;西门子S7-400;电气自动化;应用[Abstract] Anyang to steckel GaXian walking beam type reheating furnace of automation control to carry on the analysis.Is introduced through the use of S7-400 PLC hardware and programming technology,arrived in the hot rolling production line,the billet heating process requirement.[Key Words] furnace;Siemens S7-400;electrical automation;application0.前言加热炉的功能是给钢坯加热,使其到达轧钢工艺所需的温度。
是热轧生产线的第一道工序,加热质量直接影响到最后的产品质量。
而电气自动化控制在加热炉中的作用就是把钢坯从板坯库送入加热炉,再一步一步使钢坯通过预热段,加热段,均热段实现均匀加热,最后出炉,进入轧机系统。
其对加热工艺来说,尤为至关重要。
1.概况安钢炉卷轧线步进梁式加热炉的控制基本由电气,仪表和汽化冷却三部分组成。
电气由S7-400PLC来完成自动化控制。
设备包括受控设备和检测器设备。
受控设备有:装钢机,装料炉门,步进梁,出钢机,出料炉门,加热炉液压站,加热炉热水循环泵站,其它公辅设施。
检测器设备有:激光检测器,脉冲发生器,位移传感器,主令开关,行程开关,接近开关。
下面就开始介绍S4-400在该加热炉中的硬件组态,网络配置以及编程控制来实现工艺要求。
步进式加热炉自动控制演示系统设计作者:闫学勤娄毅来源:《中国教育技术装备》2013年第27期摘要本系统以棒材厂加热炉控制现场为背景,设计并制作完成与实际相结合的步进式加热炉演示系统。
下位部分采用西门子PLC来控制实现加热炉的动作;利用MCGS完成上位在线演示。
该系统为培养学生实践和创新能力提供了良好的平台。
关键词加热炉;PLC;MCGS;演示系统中图分类号:TP315 文献标识码:B文章编号:1671-489X(2013)27-0033-031 引言目前我校电气工程学院自动化实验室普遍存在控制对象单一,而开出的综合性实验由于缺少实际具体被控对象而大都处于模拟调试阶段,无法实现控制器与实际被控单元的在线调试,同学们很难将实验室设备与现场联系在一起,无法真正做到实际技能培养和训练的目的。
为了更好地帮助自动化专业学生对现场控制系统结构有更清晰的认识,利用学习过的工业现场的有关知识来解决实际问题[1],本次设计以八钢棒材厂加热炉为背景,开发完成了与生产实际紧密结合的步进式加热炉实验演示系统。
学生不仅可以更好地了解封闭加热炉内部结构,还可以演示加热炉内部工作情况。
这对于学生建立对加热炉及复杂工业生产过程的认识,自主实现模拟工业过程中检测和控制技术,综合掌握所学知识,提高学生工程实践和创新能力具有很好的帮助。
2 模型总体设计加热控制是棒材加工过程中的关键步骤。
根据控制工艺,只有对加热炉的燃烧温度以及进出钢顺序进行控制,才能保证棒材产品的质量。
2.1 工艺流程加热炉由进钢、出钢和炉体三部分组成。
加热炉的进、出钢部分分别在炉体两侧进出。
首先将准备加工的钢坯送到上料台架上,按照炉体大小,通过钢坯切割,由拉钢机逐根拉至分钢机,并传递到炉前的装料辊道上。
按照控制炉内悬臂辊道速度的方法使钢坯在炉内辊道上准确定位,然后由对齐推钢机将定位好的钢坯推到加热炉固定梁中开始加热。
加热炉内部由预热段、加热段、均热段三段式连续顺序加热组成。
第一章:步进式加热炉简介一、步进式加热炉工艺流程⒈步进式加热炉简介⑴步进式加热炉步进式加热炉是一种靠炉底或水冷金属梁的上升、前进、下降、后退的动作把料坯一步一步地移送前进的连续加热炉。
炉子有固定炉底和步进炉底,或者有固定梁和步进梁。
前者叫做步进底式炉,后者叫做步进梁式炉。
轧钢用加热炉的步进梁通常由水冷管组成。
步进梁式炉可对料坯实现上下双面加热。
⑵步进式加热炉特点和推送式连续加热炉相比,步进式加热炉具有以下优点:1.可以加热各种形状相比的料坯,特别适合推送式炉不便加热的大板坯和异型坯。
2.生产能力大,炉底强度可以达到800-100kg/m2 h,与推送式炉相比,加热等量的料坯,炉子长度可以缩短10%-15%。
3.炉子长度不受推送比的限制,不会产生拱料、粘连现象。
4.炉子的灵活性大,在炉长不变的情况下,通过改变料坯之间的距离,就可以改变炉内料块的数目,适应产量变化的需要。
而且步进周期也是可调的,如果加大每一周期前进的步距,就意味着料坯在炉内的时间缩短,从而可以适应不同金属加热要求。
5.单面加热的步进式炉没有水管黑印,不需要均热床。
两面加热的情况比较复杂,对黑印的影响要看水管绝热良好与否而定。
6.由于坯料不在炉底滑道上滑动,料坯的下面不会有划痕。
推送式炉由于推力震动,使滑道及绝热材料经常损坏,而步进式炉不需要这些维修费用。
7.轧机故障或停轧时,能踏步或将物料退出炉膛,以免料坯长期停留炉内造成氧化和脱碳。
8.可以准确计算和控制加热时间,便于实现过程自动化。
(3)步进式加热炉存在的缺点:和同样生产能力的推送式炉相比,造价高15%-20%;其次步进式炉(两面加热的)炉底支撑水管较多,水耗量和热耗量超过同样生产能力的推送式炉。
经数据表明,在同样小时产量下,步进式炉的热耗量比推送式炉高160KJ。
⒉步进式加热炉的结构⑴步进式加热炉结构图图(2)炉底结构:从炉子结构看,步进式加热炉分为上加热步进式炉、上下加热步进式炉、双步进梁步进式炉等。
步进式加热炉炉内钢坯传送的自动控制技术应用及探讨摘要:本文主要介绍山西壶关高速线材生产线步进式加热炉炉内钢坯的传送以及钢坯的行程纠偏和信息跟踪技术。
关键词:步进式加热炉;钢坯传送;行程纠偏;钢坯跟踪The use and discuss of Automation control technique in bloom converterof step-heating furnaceYu Chenglong(The Automation Department of Laiwu Iron and Steel Group,Laiwu 271104)Abstract:This article mainly introduced that in the step-heating furnace of Shanxi Huguan high speed wire production line,how to convert the bloom、correct the stroke and track the bloom’s information.Keywords:Step-heating furnace;Bloom converter;Stroke correction;Bloom’s information tracking0 前言山西壶关常平高速线材生产线加热炉为蓄热式步进加热炉,其过程控制采用电气控制、仪表控制和计算机自动控制三电一体化实现。
其中计算机自动控制系统主要包括钢坯传送自动控制和燃烧自动控制这两部分,全部采用西门子PLC 控制完成,监控画面由WINCC开发完成。
本文主要介绍炉内钢坯的自动传送及行程纠偏和钢坯信息跟踪。
1 工艺概述壶关常平高线步进式加热炉为侧进侧出式,钢坯在入炉侧炉内悬臂辊道进行准确定位后,由推钢式装钢机将钢坯推送到步进梁的特定位置,然后通过步进梁的步进动作,将钢坯一步步运送到出炉侧炉内悬臂辊道上,再通过辊道的运转将钢坯输出到轧机进行轧制。