第三章执行元件的选择与设计
- 格式:ppt
- 大小:7.68 MB
- 文档页数:82
机电一体化系统设计一、概论1、机电一体化:是在机械的主功能、动力功能、信息功能和控制功能上引进微电子技术,并将机械装置与电子装置用相关软件有机结合而构成系统的总称。
2、对检测传感器的要求:要求检测传感器具有高精度、高灵敏度和高可靠性。
3、检测传感技术的主要难点:提高可靠性、精度和灵敏度。
需要研究的问题有:①提高各种敏感材料和元件灵敏度及可靠性②改进传感器结构,开发温度与湿度、视觉与触觉同时存在的符合传感器③研究在线检测技术,提高抗干扰能力④研究具有自动诊断与自动补偿功能的传感器。
4、自动控制:自动控制是指在没有人参与的情况下,通过控制装置使被控制的对象或控制过程自动的按照预定的规律运行。
5、系统总体技术:系统总体技术是一种从整体目标出发,用系统的观点和方法将总体分解成若干功能单元,找出能完成各个功能的技术方案,再把功能与技术方案组合成方案组进行分析、评价和优选的综合应用技术。
6、系统总体技术包括:插件、接口转换、软件开发、微机应用技术、控制系统的成套性和成套设备自动化技术。
7、系统总体技术需要研究的问题:①软件开发与应用技术,包括过程参数应用软件、实时精度补偿软件②研究接插件技术,体改可靠性③通过接口和数据总线标准化④控制系统成套性和成套设备自动化⑤软件的标准化。
8、机电一体化系统由机械系统、信息处理系统、动力系统、传感检测系统、执行元件系统五个系统组成。
9、系统的五种内部功能:即主功能、动力功能、计策功能、控制功能、构造功能。
主功能是实现系统“目的功能”直接必须的功能,主要是对物质、能量、信息及其相互结合进行变换、传递和存储。
动力功能的作用是根据系统内部信息和外部信息对整个系统进行控制,使系统正常运转,实时“目的功能”。
而构造功能则是使构成系统的子系统及元、部件维持所定的时间和空间上的相互关系所必须的功能。
10、机电一体化系统设计的考虑方法同城有:几点互补法、融合法和组合法。
11、系统工程是组织管理系统的规划、研究、设计、制造、试验和使用的科学方法,是一种对所有系统都具有普遍意义的科学方法。
第一章概述1、机电一体化术语的来源:最早(1971年)起源于日本2、机电一体化乃是在机械的主功能、动机功能、信息功能和控制功能上引进微电子技术,并将机械装置与微电子装置用相关软件有机结合而构成的系统的总称。
3、机电一体化系统(产品)构成的五大部分(或子系统)是:控制器、检测传感器、执行元件、动力源、机构。
P64、机电一体化系统设计的考虑方法通常有:机电互补法、融合(结合)法和组合法。
例:机电一体化系统设计考虑方法及设计类型考虑方法——(1)机电互补法(2)结合(融合)法设计类型——(1)开发性设计(2)适应性设计(3)变异性设计第二章机械系统部件的选择与设计1、为确保机械系统的传动精度和工作稳定性,在设计中常提出低摩擦、无间隙、低惯量、高刚度、高谐振频率、适当的阻尼比等要求。
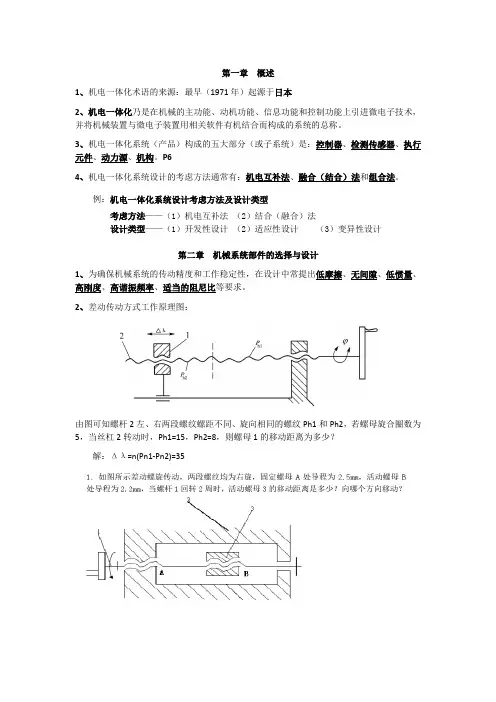
2、差动传动方式工作原理图:由图可知螺杆2左、右两段螺纹螺距不同、旋向相同的螺纹Ph1和Ph2,若螺母旋合圈数为5,当丝杠2转动时,Ph1=15,Ph2=8,则螺母1的移动距离为多少?解:Δλ=n(Pn1-Pn2)=352.如图所示的电机驱动工作台系统,其中驱动x 向工作台的三相双三拍步进电机,转子齿数z 为100。
滚珠丝杠的基本导程为l 0=6mm 。
已知传动系统的横向(x 向)脉冲当量δ为0.005mm/脉冲。
试求:(1)步进电机的步距角α;(2)减速齿轮的传动比i 。
解:(1)K=3相,N=3拍,z=100步进电机的步距角α=360º/(z*m)= 360º/(z*K*N)= 360º/(100*3*3)=0.4 º(2)由于一个脉冲,步进电机旋转0.4 º,工作台横向(x 向)脉冲当量0.005mm ,由于滚珠丝杠的基本导程为l 0=6mm ,对应于丝杠转动一周360 º ,设一个脉冲丝杠转动的角度为x ,则 6mm/360º=0.005/x º,得x=0.3º故减速齿轮的传动比i=0.3/0.4=3/46、滚珠丝杠副中滚珠的循环方式有 内循环 和 外循环 两种。
机电一体化复习知识总结(ML制作)第一章绪论1 Mechatronics机电一体化,由机械学与电子学组合而成。
2 机电一体化含有两方面内容,首先是机电一体化技术,其次是机电一体化产品。
3 机电一体化的目的是提高系统的附加值,即多功能、高效率、高可靠性、省材料省能源。
4 机电一体化系统需解决的共性关键技术有检测传感技术、信息处理技术、伺服驱动技术、自动控制技术、机密机械技术及系统总体技术。
5 机电一体化系统由机械系统(机构)、信息处理系统(计算机)、动力系统(动力源)、传感检测系统(传感器)、执行元件系统(如电动机)等五个子系统组成。
6 构成机电一体化系统的要素或子系统之间必须能顺利的进行物质、能量与信息的交换和传递。
7 机电一体化系统设计类型有开发性设计、适应性设计与变异性设计。
8 确定机电一体化系统目的功能与规格后,机电一体化技术人员利用机电一体化技术进行设计、制造的整个过程为“机电一体化工程”。
9 机电一体化系统设计的现代设计方法,计算机辅助设计与并行工程、虚拟产品设计、快速响应设计、绿色设计、反求设计、网络合作设计。
第二章机械系统部件的选择与设计1 机械系统部件的设计要求低摩擦、短传动链、最佳传动比、反向死去误差少、高刚性。
2 机械传动部件实质上是一种转矩、转速变换器,其目的是使执行元件与负载之间在转矩与转速方面得到最佳匹配。
3 机电一体化发展要求传动机构不断适应精密化,高速化,小型、轻量化要求。
4 滚珠丝杠四种基本类型(1)螺母固定、丝杠转动并移动,(2)丝杠转动、螺母移动,(3)螺母移动、丝杠移动,(4)丝杠固定、螺母移动并转动。
5 滚珠丝杠副中滚珠的循环方式有内循环和外循环两种,内循环方式的滚珠在循环过程中始终与丝杠表面接触。
6 滚珠丝杠副轴向间隙的调整与预紧(1)双螺母螺纹预紧调整式,(2)双螺母齿差预紧调整式,(3)双螺母垫片调整预紧式,(4)弹簧式自动调整预紧式,(5)单螺母变位导程预紧式,(6)单螺母滚珠过盈预紧式。
基于项目教学法的机电一体化系统设计教学改革研究摘要:机电一体化系统设计是一门多学科交叉融合、各章节相对独立的课程,而且理论知识与实践联系较为紧密,学习难度较大;因此本文提出一种与智能物流机器人研究项目相结合的项目驱动教学方法,在教学内容、教学实施以及学习评价等方面进行了相应改革,以提高学生学习的积极性并促进学生能够将知识点繁多的课程内容系统性学习,切实提高学生专业实践动手能力和创新精神。
关键词:项目教学法;教学改革;机电一体化系统设计机电一体化系统设计是机械电子工程专业一门重要的专业课程,该课程的任务是通过机械设计理论、控制原理、传感检测技术以及信号处理等多方面基本知识的学习,使学生掌握机电一体化系统设计的主要步骤、过程和方法[1]。
但是机电一体化系统设计课程由多学科交叉融合而且各章节相对独立,部分内容需要以先修课程为基础,在同一个班级里每位学生的专业基础知识水平参差不齐,因此保证该课程的教学效果难度较大,单纯的传统讲授教学以及仅凭借考试评定成绩的方式已经不能适应这样一门综合性强的课程[2]。
本文提出将课程内容与智能物流机器人研究项目相结合,将书本上抽象的的知识通过项目具体化,学生能够在项目实施的过程中真正将理论知识转化为实践,提高教学效果。
一、项目教学内容机电一体化系统设计教材中通常包含机械系统部件的选择与设计、执行元件的选择与设计、微机控制系统的选择及接口设计等内容,而本文中的智能物流搬运机器人是指能够根据调度系统下达的控制指令以及预先写入的程序,依照车载传感器感知的位置和坐标信息,沿着在车间中规划好的路线前进,同时能够对物料进行识别将所需物料运送至指定位置的机电一体化设备,其设计以及制造的过程中涉及到对机器人的机械结构设计、伺服电机控制、传感器信息检测以及单片机程序编写等方面,与机电一体化系统设计课程内容联系紧密,几乎与机电一体化系统设计教材中的各个章节相互对应,因此智能物流搬运机器人研究项目与课程内容具有较高的匹配度,同时该项目将教材中原本独立的章节融合为一个整体,有利于学生系统性学习并为将来从事机械电子系统设计、工程机械、机器人、自动控制等领域工作积累项目经验。