液压伺服与比例控制系统第四章 机液伺服系统
- 格式:ppt
- 大小:1.55 MB
- 文档页数:42
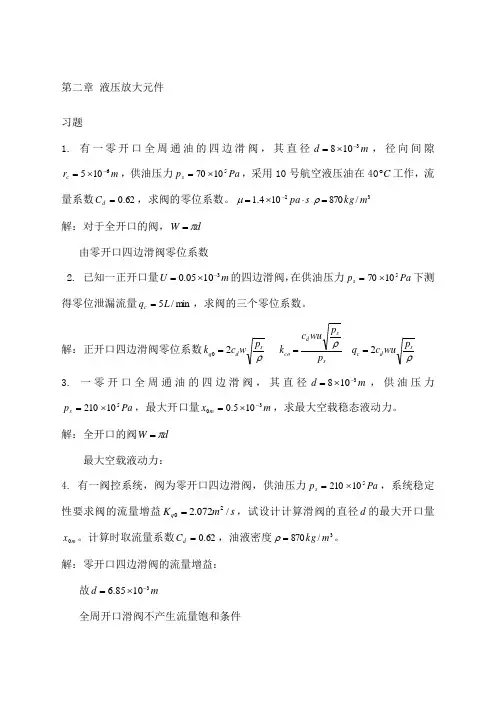
第二章 液压放大元件 习题1. 有一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,径向间隙m r c 6105-⨯=,供油压力Pa p s 51070⨯=,采用10号航空液压油在40C ︒工作,流量系数62.0=d C ,求阀的零位系数。
s pa ⋅⨯=-2104.1μ3/870m kg =ρ 解:对于全开口的阀,d W π=由零开口四边滑阀零位系数2. 已知一正开口量m U 31005.0-⨯=的四边滑阀,在供油压力Pa p s 51070⨯=下测得零位泄漏流量min /5L q c =,求阀的三个零位系数。
解:正开口四边滑阀零位系数ρsd q p wc k 20= ssd co p p wuc k ρ=ρsd c p wuc q 2=3. 一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,供油压力Pa p s 510210⨯=,最大开口量m x m 30105.0-⨯=,求最大空载稳态液动力。
解:全开口的阀d W π= 最大空载液动力:4. 有一阀控系统,阀为零开口四边滑阀,供油压力Pa p s 510210⨯=,系统稳定性要求阀的流量增益s m K q /072.220=,试设计计算滑阀的直径d 的最大开口量m x 0。
计算时取流量系数62.0=d C ,油液密度3/870m kg =ρ。
解:零开口四边滑阀的流量增益:故m d 31085.6-⨯=全周开口滑阀不产生流量饱和条件5. 已知一双喷嘴挡板阀,供油压力Pa p s 510210⨯=,零位泄漏流量s m q c /105.736-⨯=,设计计算N D 、0f x 、0D ,并求出零位系数。
计算时取8.00d =C ,64.0df =C ,3/870m kg =ρ。
解:由零位泄漏量ρπs f N df c p X D C q 02⋅⋅⋅= 即160Nf D X =得: mm p C q D s df cN 438.0216=⋅⋅=ρπ 则:若:8.00=d df C C ,1610=Nf D X 则mm D D N 193.044.00== 第三章 液压动力元件 习题1. 有一阀控液压马达系统,已知:液压马达排量为rad m D m /10636-⨯=,马达容积效率为95%,额定流量为s m q n /1066.634-⨯=,额定压力Pa p n 510140⨯=,高低压腔总容积34103m V t -⨯=。


第二章 液压放大元件 习题1. 有一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,径向间隙m r c 6105-⨯=,供油压力Pa p s 51070⨯=,采用10号航空液压油在40C ︒工作,流量系数62.0=d C ,求阀的零位系数。
s pa ⋅⨯=-2104.1μ3/870m kg =ρ解:对于全开口的阀,d W π=由零开口四边滑阀零位系数s m p w C K s d q /4.1870/107010814.362.02530=⨯⨯⨯⨯=⋅=-ρ()s p m r K a c c ⋅⨯=⨯⨯⨯⨯⨯⨯⨯=⋅=----/104.4104.13210814.310514.33231223620μπ m p K K r p C K a c q c s dp /1018.332110020⨯==⋅=πρμ2. 已知一正开口量m U 31005.0-⨯=的四边滑阀,在供油压力Pa p s 51070⨯=下测得零位泄漏流量min /5L q c =,求阀的三个零位系数。
解:正开口四边滑阀零位系数ρsd q p wc k 20= ssd co p p wuc k ρ=ρsd c p wuc q 2=s m q K cq /67.11005.060/1052330=⨯⨯==--ν s a s c c p m p q K ⋅--⨯=⨯⨯⨯==/1095.51070260/1052312530 m p K K K a c q p /1081.211000⨯==3. 一零开口全周通油的四边滑阀,其直径m d 3108-⨯=,供油压力Pa p s 510210⨯=,最大开口量m x m 30105.0-⨯=,求最大空载稳态液动力。
解:全开口的阀d W π= 最大空载液动力:4.113105.010********.343.043.035300=⨯⨯⨯⨯⨯⨯⨯=⋅⋅=--⋅m s s x p W F4. 有一阀控系统,阀为零开口四边滑阀,供油压力Pa p s 510210⨯=,系统稳定性要求阀的流量增益s m K q /072.220=,试设计计算滑阀的直径d 的最大开口量m x 0。
液压伺服系统工作原理1.1 液压伺服系统工作原理液压伺服系统以其响应速度快、负载刚度大、控制功率大等独特的优点在工业控制中得到了广泛的应用。
电液伺服系统通过使用电液伺服阀,将小功率的电信号转换为大功率的液压动力,从而实现了一些重型机械设备的伺服控制。
液压伺服系统是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。
液压伺服系统的工作原理可由图1来说明。
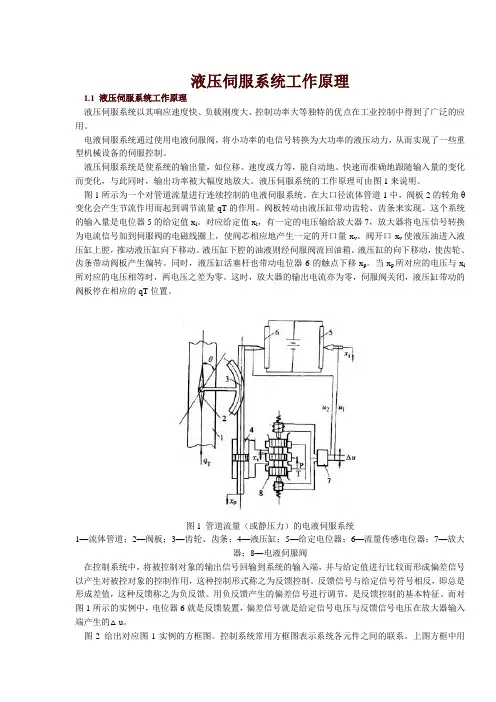
图1所示为一个对管道流量进行连续控制的电液伺服系统。
在大口径流体管道1中,阀板2的转角θ变化会产生节流作用而起到调节流量qT的作用。
阀板转动由液压缸带动齿轮、齿条来实现。
这个系统的输入量是电位器5的给定值x i。
对应给定值x i,有一定的电压输给放大器7,放大器将电压信号转换为电流信号加到伺服阀的电磁线圈上,使阀芯相应地产生一定的开口量x v。
阀开口x v使液压油进入液压缸上腔,推动液压缸向下移动。
液压缸下腔的油液则经伺服阀流回油箱。
液压缸的向下移动,使齿轮、齿条带动阀板产生偏转。
同时,液压缸活塞杆也带动电位器6的触点下移x p。
当x p所对应的电压与x i 所对应的电压相等时,两电压之差为零。
这时,放大器的输出电流亦为零,伺服阀关闭,液压缸带动的阀板停在相应的qT位置。
图1 管道流量(或静压力)的电液伺服系统1—流体管道;2—阀板;3—齿轮、齿条;4—液压缸;5—给定电位器;6—流量传感电位器;7—放大器;8—电液伺服阀在控制系统中,将被控制对象的输出信号回输到系统的输入端,并与给定值进行比较而形成偏差信号以产生对被控对象的控制作用,这种控制形式称之为反馈控制。
反馈信号与给定信号符号相反,即总是形成差值,这种反馈称之为负反馈。
用负反馈产生的偏差信号进行调节,是反馈控制的基本特征。
而对图1所示的实例中,电位器6就是反馈装置,偏差信号就是给定信号电压与反馈信号电压在放大器输入端产生的△u。
液压伺服系统液压伺服系统是以高压液体作为驱动源的伺服系统,是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。
液压伺服系统以其响应速度快、负载刚度大、控制功率大等独特的优点在工业控制中得到了广泛的应用。
一、液压伺服系统的基本组成液压伺服系统无论多么复杂,都是由一些基本元件组成的。
如图就是一个典型的伺服系统,该图表示了各元件在系统中的位置和相互间的关系。
(1)外界能源—为了能用作用力很小的输入信号获得作用力很大的输出信号,就需要外加能源,这样就可以得到力或功率的放大作用。
外界能源可以是机械的、电气的、液压的或它们的组合形式。
(2)液压伺服阀—用以接收输入信号,并控制执行元件的动作。
它具有放大、比较等几种功能,如滑阀等。
(3)执行元件—接收伺服阀传来的信号,产生与输入信号相适应的输出信号,并作用于控制对象上,如液压缸等。
(4)反馈装置—将执行元件的输出信号反过来输入给伺服阀,以便消除原来的误差信号,它构成闭环控制系统。
(5)控制对象—伺服系统所要操纵的对象,它的输出量即为系统的被调量(或被控制量),如机床的工作台、刀架等。
二、液压伺服系统的分类液压伺服系统是由液压动力机构和反馈机构组成的闭环控制系统,分为机械液压伺服系统和电气液压伺服系统(简称电液伺服系统)两类。
电液伺服系统电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。
最常见的有电液位置伺服系统、电液速度控制系统和电液力(或力矩)控制系统。
如图是一个典型的电液位置伺服控制系统。
图中反馈电位器与指令电位器接成桥式电路。
反馈电位器滑臂与控制对象相连,其作用是把控制对象位置的变化转换成电压的变化。
反馈电位器与指令电位器滑臂间的电位差(反映控制对象位置与指令位置的偏差)经放大器放大后,加于电液伺服阀转换为液压信号,以推动液压缸活塞,驱动控制对象向消除偏差方向运动。
当偏差为零时,停止驱动,因而使控制对象的位置总是按指令电位器给定的规律变化。
