移动互联网嵌入式物联网人工智能创新实验室:AI-Python六足机器人
- 格式:docx
- 大小:5.08 MB
- 文档页数:12

智能六足机器人舞蹈设计实验报告【摘要】本文介绍了一款低成本的小型舞蹈六足机器人的设计。
根据仿生学原理确定六足机器人的比例尺寸,根据六足机器人的功能要求确定其自由度配置,选择了合适的材料和驱动元件,实现了一个小型的双足舞蹈六足机器人。
舞蹈六足机器人是娱乐六足机器人的一种,集软件和硬件于一身,核心是控制系统。
采用基于上下位机的控制结构,通过无线通信方式传输数据和指令。
在音乐特征识别的基础上结合专家系统、模糊控制等手段,通过舞蹈动作与音乐的自动匹配、同步演示等方法,实现舞蹈动作与音乐协调一致。
舞蹈六足机器人的设计一般要经过创意提案、整体论证、初步设计、组装调试、最终定型等几个大的步骤。
其中最重要的当数其中的机械设计环节,它关系到后面六足机器人的整体性能以及控制系统的设计。
【关键词】舞蹈六足机器人;AVR单片机;舵机1.引言六足机器人是作为现代高新技术的重要象征和发展结果,已经广泛应用于国民生产的哥哥领域,并正在给人类传统的生产模式带来革命性的变化,影响着人们生活的方方面面。
六足机器人一般由执行机构、驱动装置、检测装置和控制系统等组成。
现在,国际上对六足机器人的概念已经逐步趋近一般,即六足机器人是靠自身动力和控制能力来实现各种功能的一种机器。
联合国标准化组织采纳了美国六足机器人协会给六足机器人下的定义:“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统。
”六足机器人产业在二十一世界将成为和汽车、电脑并驾齐驱的主干产业。
从庞大的工业六足机器人到微观的纳米六足机器人,从代表尖端技术的仿人型六足机器人到孩子们喜爱的宠物六足机器人,六足机器人正在日益走进我们的生活,成为人类最亲密的`伙伴。
六足机器人技术和产业化在全中国甚至全世界拥有一定得现实基础和广阔的市场前景。
本次设计采用Atmega16L单片机作为双足六足机器人控制单元的核心,具备自主决策和智能判断的能力。

摘要随着人类探索自然界步伐的不断加速,各应用领域对具有复杂环境自主移动能力机器人的需求,日趋广泛而深入。
理论上,足式机器人具有比轮式机器人更加卓越的应对复杂地形的能力,因而被给予了巨大的关注,但到目前为止,由于自适应步行控制算法匮乏等原因,足式移动方式在许多实际应用中还无法付诸实践。
另一方面,作为地球上最成功的运动生物,多足昆虫则以其复杂精妙的肢体结构和简易灵巧的运动控制策略,轻易地穿越了各种复杂的自然地形,甚至能在光滑的表面上倒立行走。
因此,将多足昆虫的行为学研究成果,融入到步行机器人的结构设计与控制中,开发具有卓越移动能力的六足仿生机器人,对于足式移动机器人技术的研究与应用具有重要的理论和现实意义。
六足仿生机器人地形适应能力强,具有冗余肢体,可以在失去若干肢体的情况下继续执行一定的工作,适合担当野外侦查、水下搜寻以及太空探测等对自主性、可靠性要求比较高的工作。
关键词:六足机器人,适应能力强,结构设计AbstractWith the increasingly rapid step of human exploration of nature, the demand for robots with autonomous mobility under complex environment has been getting broader and deeper in more and more application areas. Theoretically, legged robot offers more superior performance of dealing with complicated terrain conditions than that provided by wheeled robot and therefore has been given great concern, however up to now,for the reason of absence of adaptive walk control algorithm,legged locomotion means still could not be put into practice in many practical applications yet。

载人六足机器人操控系统设计苗雅男【摘要】本文以大型载人六足机器人的研究为背景,采用基于ARM内核处理器的VxWorks实时多任务操作系统对机器人的操纵控制系统进行了研究.采用具有高性能的远程数据采集和控制系统的CAN总线和RS485总线通信接口,设计开发了基于ucGUI嵌入式图形支持系统的操控系统显示界面.该操控系统能够在一个50ms 周期内实时把采集到的操控命令传输到底层控制系统,并在下一个周期能够及时完成底层控制系统反馈数据的处理及显示.【期刊名称】《黑龙江科技信息》【年(卷),期】2017(000)034【总页数】3页(P76-78)【关键词】载人六足机器人操控系统;CANbusandRS485bus;数据采集【作者】苗雅男【作者单位】四川工商学院电子信息工程学院,四川成都 611745【正文语种】中文由于人类环境保护意识的淡薄致使自然环境遭受破坏,自然灾害频发,严重威胁人类的生存和发展。
灾害发生后的救援环境十分恶劣,甚至人类依靠现有工具难以抵达救灾现场,而且救援人员生命安全也受到了严重的威胁[1]。
所以,能够替代人类工作在复杂环境下的六足仿生机器人的开发与设计具有非常重要的理论意义和实际价值,这些仿生机器人可用于对地震等灾害发生后的救援、扑灭森林火灾、探索未知的复杂地理环境以及在特殊地形环境运送物资等方面,极大保护了人类的生命财产安全[2]。
足式机器人的研究是从仿生学角度出发,相比较于轮式和履带式机器人的连续滚动式行进,它具有了有足生物落足点离散的行走特点[3]。
其中,六足机器人以其良好的地形适应能力、优越的运动性能以及优良的稳定性在足式机器人中独占鳌头。
由于六足机器人工作环境的多变性,也增加了六足机器人操纵功能及模式的复杂性[4]。
本文基于VxWorks实时多任务操作系统和ucGUI嵌入式图形支持系统,采用以ARM9内核的S3C2440芯片为核心控制器,研究开发了高性能的载人六足机器人操纵控制系统(简称“操控系统”)[5]。
作者: 姜奥博[1];胡聪[1];朱辉[1];吴汉斌[1]
作者机构: [1]桂林电子科技大学,广西桂林541000
出版物刊名: 科技资讯
页码: 10-12页
年卷期: 2019年 第31期
主题词: 六足机器人;图像采集;WiFi;传感器
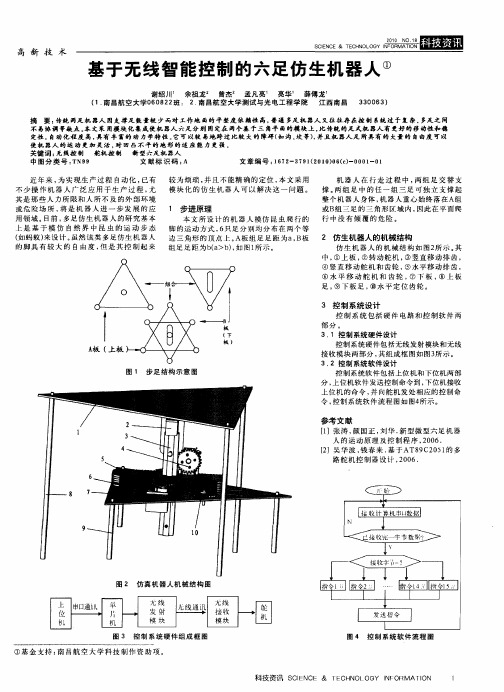
摘要:腿足机器人是移动机器人领域的重要研究方向。
与其他类型的移动机器人相比,腿足机器人在非结构环境中进行野外探测,灾区救援和粗糙道路交通运输上有着显著优势。
该文基于仿生运动学和图像处理算法进行设计六足机器人可以实现通过手机控制六足机器人行走,可以实现通过WiFi进行机器人与手机的通信,实现机器人跟随发送的指令进行相应动作。
系统稳定可靠。
基于单片机的六足仿生机器人设计作者:赵丹陶砂曲鸣飞来源:《中国科技博览》2015年第06期[摘要]基于仿生原理,设计、制作动作灵活、结构简单的六足机器人,对其结构组成、行走原理、步态规划算法与控制系统设计进行介绍。
实验表明,本系统具有良好的控制稳定性。
中图分类号:TP242 文献标识码:A 文章编号:1009-914X(2015)06-0315-01前言机器人技术融合了机械、电子、传感器、计算机、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术。
轮式车辆在平地公路运输中有着无可替代的用途,而履带车辆被广泛应用在沙地和泥泞的地面。
足式步行机器人适合于山地和复杂多障碍地面的移动,多足步行机器人由于足端与地面接触面积小的特点,机器人能够在足端点可达工作范围内自由调整步行姿态,灵活选择机械腿的落脚点,越过障碍物和小沟壑,具有很高的避障、越障能力,因此能更好的适应崎岖地形,其研究对于军事运输、矿山开采、星球探测等领域具有重要的意义。
本文开发设计一种可靠、实用的六足圆形仿生机器人,该机构具有结构紧凑,传动可靠的优点,且留有较大的负重余量,便于今后功能的扩展。
1.六足机器人机构设计及分析本文设计的圆形六足仿生机器人作为一个系统,其运动关节、机械足以及机身构成了机器人的整体,六条机械足与机身通过舵机相连,均匀分布的圆形躯干的四周。
机器人质量重1.98kg。
六足机器人打开时的整体直径为640mm,身高为100mm;收起时的机器人整体直径为300mm,身高为290mm。
六足机器人每条腿上有3个关节,即3个自由度,全身共18个自由度。
如图1所示。
对于一个仿生机器人来说,每条腿上的3个自由度基本能满足到达各个位置的要求,实现躯干的灵活攀爬。
按照由躯干到足端的顺序,六足机器人每条腿上的三个自由度其传动方式如下:第一个自由度,由舵机带动腿部转节前后摆动,从而使整条腿前后摆动。
第二个自由度,由舵机带动腿部股节上下摆动。
仿生六足机器人的发展现状与应用
仿生六足机器人是一种具有人型协调运动能力的机器,可以为研
究者提供在室内外环境中进行自由运动的机会,也能实现复杂环境下
多参数感知和模仿有智能的行为。
近年来,人们在仿生六足机器人的发展方面取得了许多突破。
例如,最近一些机器人已经能够实现外部环境下的高速、大范围行走;
他们也能够识别和跟踪动态实例,实现抓取物品;此外,还可以模仿
人的行为,成为具有一定的社会意识的机器人。
在研究方面,传感器、机械控制、运算处理、人机交互等技术的发展优化也取得了很大的进步。
从应用的角度来看,仿生六足机器人已经用于自主开发、家庭智
能辅助照料服务、调查、巡查、负责人员教学等多个场合。
作为一种
携带多种传感器、具有微米精度的机器,它们也可以应用于野外环境
的危险焊接任务、生物多样性研究、地形信息采集以及建筑物的搜索
与救援等,以及更多的用途等等。
例如,目前KHR-1机器人正在被用
于教学研究、加工制造及服务机器人,以及护理行业服务,而ASIMO
机器人则被用于接待与安全服务。
综上所述,随着技术的不断进步,仿生六足机器人仍在向着更快、更多样化的发展趋势不断推进,由于其优异的性能和广泛的应用范围,仿生六足机器人拥有广阔的发展前景。
一、前言談到足式機器人,當然目前主流大多是聯想到和人相似、有親切感的雙足機器“人”,從某一層面來看,以雙足步行為演化上的一個極為小眾的特例,本身對達到穩定運作控制的困難度很高,從瞭解「生物出生到可以開始自行運動所需的時間」便可以窺知一二。
從另一個角度來看,人類所能自在運動的地表也侷限在某一些型態之中,若要探討如何在各式自然地形上運動的法則,勢必得回過頭來探討多足動物的運動機制。
而從物理直覺來評析,單就在崎嶇路面上運動的穩定性來探討,採用多足機器人會比較簡單且實際。
基於這一些原因,仿生多足機器人的研發便有了背後的動機,模仿經過長時間演化後動物的構造,藉由觀察牠們的運動,了解為什麼有如此的動作,再利用機構或是控制去完成。
在自然界中,我們看到體型較大、有優秀運動能力的動物像馬、獵豹、羚羊等等都是四隻腳的哺乳類動物,但考慮到穩定性卻是六足比較佔優勢,只要用簡單的三腳步態(tripod gait)即可讓重心輕易落在支撐的三角形中。
四足動物的腳可能需要比較大的力量才能表現出他的特性,但人類尚無法仿造出重要的肌肉和控制系統,以現有機構和馬達組成的系統,重量太重而無法有效運動。
這時,自由度的選擇以及機構設計便成了一個很重要的課題。
這二、三十年學業界創造出了許多各式各樣的多足機器人,在後續的文章中便為各位讀者進行介紹[2, 3]。
二、學術界開發仿生多足機器人(1)Quadruped圖一 Quadruped[4]由Prof. Marc Reibert所領導的MIT Leg Lab於1984~1987年製作,重38公斤,整體長度1.05公尺,高度0.95公尺,採用長柱狀的腳,每一隻腳連接身體的關節是由兩個液壓致動器(hydraulic actuators)組成,分別控制腳的前後及左右的旋轉,腳上有一個線性致動器來提供推進力。
在控制上將腳簡易的分成兩組,不同的分組方法便產生了小跑(trot)、跑(pace)和奔馳(bound)等三種步態,奔馳可達到3.5個身體長度,有很好的穩定性和運動特性。
基于多模态切换的六足机器人自适应控制研究基于多模态切换的六足机器人自适应控制研究摘要:本文针对六足机器人在不同地形和环境下的运动控制问题展开研究,提出了一种基于多模态切换的自适应控制策略。
该策略通过对六足机器人的多种运动模态进行切换,以适应不同环境下的运动需求和地形特征,从而实现自适应控制。
具体实现上,我们首先对六足机器人的多种运动模态进行分析和分类,包括慢速爬行、快速奔跑、跳跃等,然后采用神经网络算法对多种运动模态进行建模和训练,以实现自适应选择最优的运动模态。
同时,为了进一步提高六足机器人的运动能力和适应性,我们还针对不同地形和环境下的运动需求进行了仿真模拟和实验验证。
最终实验结果表明,该控制策略具有较好的自适应性和适应性,能够有效提高六足机器人的运动控制能力和环境适应性。
关键词:六足机器人,自适应控制,多模态切换,神经网络,环境适应性,仿真模拟。
1. 引言在现今社会中,机器人技术已经被广泛应用于各种工业生产和科研领域,其中六足机器人作为一种较为先进的机器人形态,其运动能力和适应性已经被广泛研究。
然而,由于不同地形和环境的差异,六足机器人在实际运动过程中仍然存在一些问题,例如运动控制不稳定、运动速度较慢等。
因此,如何实现六足机器人在不同地形和环境下的自适应控制,成为了当前机器人研究的热点和难点之一。
2. 研究方法2.1 多模态切换策略为了解决六足机器人在不同地形和环境下的运动控制问题,本文提出了一种基于多模态切换的自适应控制策略。
该策略通过对六足机器人的多种运动模态进行切换,以适应不同环境下的运动需求和地形特征,从而实现自适应控制。
具体实现上,我们首先对六足机器人的多种运动模态进行分析和分类,包括慢速爬行、快速奔跑、跳跃等。
然后采用神经网络算法对多种运动模态进行建模和训练,以实现自适应选择最优的运动模态。
当六足机器人在运动过程中出现环境变化时,系统会自动切换到最优运动模态,以保证六足机器人的稳定性和运动效率。
1.1AI-Python六足机器人
1.1.1图文介绍
Python六足机器人是基于AI-Python嵌入式编程平台的一款六足蜘蛛机器人应用扩展,它除了可以完成AI-Python嵌入式编程平台可以完成的众多应用学习外,还可以完成一些六足蜘蛛机器人应用开发,包括舞蹈、行走、探险、爬楼、杂技、陪伴等。
Python六足机器人是一款仿生蜘蛛应用,它采用数字总线舵机控制方式,利用18个高性能高扭力数字总线舵机,精确模拟蜘蛛的6条腿各个关节,实现蜘蛛的仿生动作模拟和执行;六足机器人本体通过一块驱动控制板进行集中传感采集和控制,驱动控制板通过单总线驱动18路数字舵机,实现精确的关节角度控制;机器人本体前方采用一个超声波测距传感器实现前方的物体检测,可实现如避障、跟随等应用;本体驱动控制板具备电源管理功能,能够为本体的5500mAH锂电池提供充放电管理功能;机器人本体驱动控制板通过单路串行总线连接AI-Python嵌入式编程平台,利用Python语言的灵活性、便捷性和AI-Python编程平台的强大能力可实现各种基于六足机器人的创意应用。
项目一:蓝牙控制行走
编写Python程序,控制六足机器人实现蓝牙控制行走的功能。
Python程序主要实现以下几项功能:
1) 可通过串口接收蓝牙模块接收到的控制指令;
2) 令机器人根据接收到的指令,执行前进、后退、转身等动作。
在手机上安装蓝牙调试app,连接AI-Python主控平台,发送指令,控制机器人前进、后退、转身:
- 1 -
项目二:机器人跳舞
编写Python程序,控制六足机器人进行各种舞蹈动作。
Python程序主要实现以下几项功能:
1) 可通过串口接收蓝牙模块接收到的控制指令;
2) 令机器人根据接收到的指令,执行各种舞蹈动作。
在手机上安装蓝牙调试app,连接AI-Python主控平台,发送指令,控制机器人执行各种舞蹈动作:
项目三:机器人楼梯行走
六足机器人由于其特殊的仿生学机械结构,可以在各种崎岖不平、有高低差的地形上正常行走,这是车型机器人和人形机器人都无法做到的。
生活中比较常见的有高低差的地形就是楼梯,编写Python 程序,控制六足机器人实现楼梯行走的功能。
Python 程序主要实现以下几项功能:
1) 可通过串口接收蓝牙模块接收到的控制指令;
2) 令机器人根据接收到的指令,执行上楼、下楼等动作。
在手机上安装蓝牙调试app ,连接AI-Python 主控平台,发送指令,控制机器人进入楼梯行走模式:
项目四:机器人颜色跟踪
编写Python程序,控制六足机器人实现颜色跟踪行走的功能。
Python程序主要实现以下几项功能:
1) 可通过串口接收蓝牙模块接收到的控制指令;
2) 通过摄像头识别指定颜色,识别到色块时,计算色块所在位置在当前视界中的角度;
3) 机器人在识别到指定颜色时,跟随色块前进、转向;识别不到指定颜色时,停止前进。
在手机上安装蓝牙调试app,连接AI-Python主控平台,发送指令,控制机器人进入颜色跟踪模式:
注:本实训项目需要使用摄像头,所以只支持微控制板为MPH7/MPK2的AI-Python
主控平台。
项目五:Apriltag码识别及跟踪行走
AprilTag是一个视觉基准系统,是一种二维条形码。
它们被设计用于编码更小的数据有效载荷(4到12位之间),从而可以更长距离地检测它们。
此外,它们设计用于高定位精度 - 可以计算AprilTag相对于相机的精确3D位置。
编写Python程序,控制六足机器人实现Apriltag码识别及跟踪行走的功能。
Python 程序主要实现以下几项功能:
1) 可通过串口接收蓝牙模块接收到的控制指令;
2) 通过摄像头识别前方是否存在Apriltag码,识别到Apriltag码时显示在OLED 屏上;
3) 令机器人在识别到Apriltag码时,跟随Apriltag码前进、转向;
4) 机器人与Apriltag码距离过近时,会因为识别不到完整的Apriltag码而停止。
在手机上安装蓝牙调试app,连接AI-Python主控平台,发送指令,控制机器人进入Apriltag码跟踪模式:
注:本实训项目需要使用摄像头,所以只支持微控制板为MPH7/MPK2的AI-Python 主控平台。
项目六:交通标志识别与处理
通过AiStudio训练交通标志的神经网络模型,将训练好的模型导入AI-Python主控平台,可以实现交通标志识别与处理。
编写Python程序,控制六足机器人实现交通标志识别及跟踪行走的功能。
Python 程序主要实现以下几项功能:
1) 可通过串口接收蓝牙模块接收到的控制指令;
2) 通过摄像头识别前方是否存在交通标志,识别到交通标志时将识别结果显示在OLED屏上;
3) 令机器人在识别到交通标志时,做出对应的处理:识别到左/右转标志时转弯,识别到红灯停、绿灯行,识别到停车标志停止,识别到直行标志前进。
在手机上安装蓝牙调试app,连接AI-Python主控平台,发送指令,控制机器人进入交通标志处理模式:
注:本实训项目需要自主训练神经网络模型,所以只支持微控制板为MPK2的AI-
Python主控平台。
1.1.2产品参数
1.1.3课程资源
AI-Python六足机器人提供配套的Python课程及实验,包括Python语言基础、Python算法应用、Python嵌入式控制、Python上位机通信、Python神经网络应用、android嵌入式应用。
《Python应。