多体动力学仿真、creo高级技巧
- 格式:pptx
- 大小:509.05 KB
- 文档页数:26
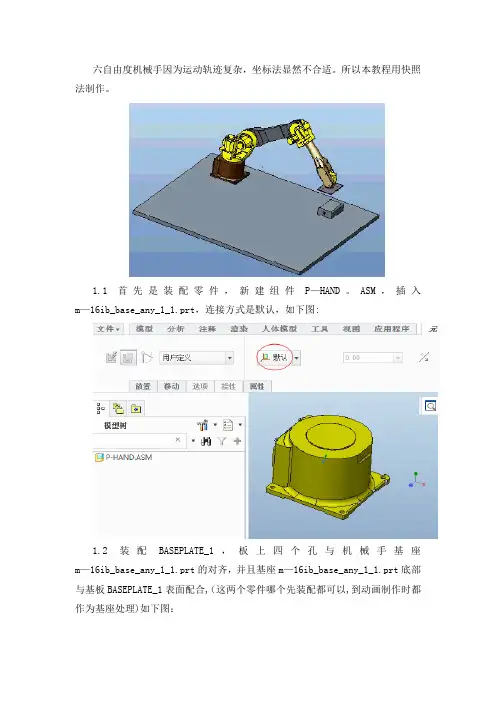
六自由度机械手因为运动轨迹复杂,坐标法显然不合适。
所以本教程用快照法制作。
1.1首先是装配零件,新建组件P—HAND。
ASM,插入m—16ib_base_any_1_1.prt,连接方式是默认,如下图:1.2装配BASEPLATE_1,板上四个孔与机械手基座m—16ib_base_any_1_1.prt的对齐,并且基座m—16ib_base_any_1_1.prt底部与基板BASEPLATE_1表面配合,(这两个零件哪个先装配都可以,到动画制作时都作为基座处理)如下图:1.3装配零件m—16ib_axis1_any_1_1。
prt,以销的方式连接,注意销连接的方向,如图:1。
4旋转轴对齐,当前位置输入0,勾选启用重新生成值。
如下图:1.5销连接方式装配m—16ib_axis2_any_1_1.prt,注意销连接的方向,如下图:平移设置中,约束类型为距离,分别选择下面两个面,偏移距离15,如下图:旋转轴选择如下图的两个基准面,当前位置输入0,如下图:当前位置输入-40,零件往如下图所示的方向偏40度(这个要根据销连接的运动方向,如没有如下图所示的方向偏就改变销连接方向),如下图:点击设置零位置,勾选启用重新生成值,确定完成装配,如下图:1。
6装配零件m-16ib_axis3_any_1_1。
prt,还是销连接,轴对齐,平移选择下图两个面,约束类型为重合,注意销连接方向,如下图:旋转轴选择下面两个基准面,如下图:当前位置输入90,零件往如下图所示方向翻转90度(翻转的方向取决于销的连接方向),如下图:点击设置零位置,勾选重新生成值,如下图:装配零件m—16ib_axis4_any_1_1。
prt,销连接,如下图:旋转轴如下图:装配零件m-16ib_axis5-6_any_1_1。
prt,销连接,注意连接方向,如下图:旋转轴设置如下图:装配零件FIX_1,销连接,注意连接方向,如下图:旋转轴的设置和前面的差不多,如下图:物料装配,在这里不用约束,用户定义,放置设置成自动,如下图:显示基准面,点击拖动元件,弹出对话框,点击约束—对齐两个图元,分别选择下图两个基准面,如下图:点击对齐两个图元,分别选择下图两个曲面,如下图:点击对齐两个图元,分别选择下图箭头的两个基准面,在下面的偏移,offset处输入—700,如下图:点击拍下当前配置的快照,如下图:再点击拍下当前配置的快照,点击约束,点击对齐两个图元,点击显示基准面,分别选择下图两个基准面,如下图:点击对齐两个图元,分别选择以下曲面,如下图:对齐结果,如下图:隐藏基准面,点击主体—主体锁定约束,如下图:分别选择物料PP_1和FIX_1,然后点击右下角的小对话框的确定,生成一个主体锁定约束,如下图:点击运动轴约束,选择下图箭头中的销连接,如下图:下面的偏移值就是当前销连接的位置,如下图:用同样的办法添加下图所示的三个连接运动轴约束,如下图: 添加后,效果如下图:添加完毕后,点击约束旁边的快照,点击将选定快照更新为屏幕上的当前配置,如下图:点击拍下当前配置的快照,点击约束,删除两个对齐图元约束,点击相应的对齐图元约束,观察模型显示来判断,如下图:点击连接3、4、8把偏移值分别改成0,观察机械手与物料变化情况,如下图:添加完毕后,参照前面一样,点击约束旁边的快照,点击将选定快照更新为屏幕上的当前配置;点击拍下当前配置的快照,点击约束,删除一个对齐图元约束,点击相应的对齐图元约束,观察模型显示来判断,如下图:点击运动轴约束,添加下图所示的连接,如下图:在新添加的连接约束下面的偏移输入90,如下图:整个机械手旋转了90度。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
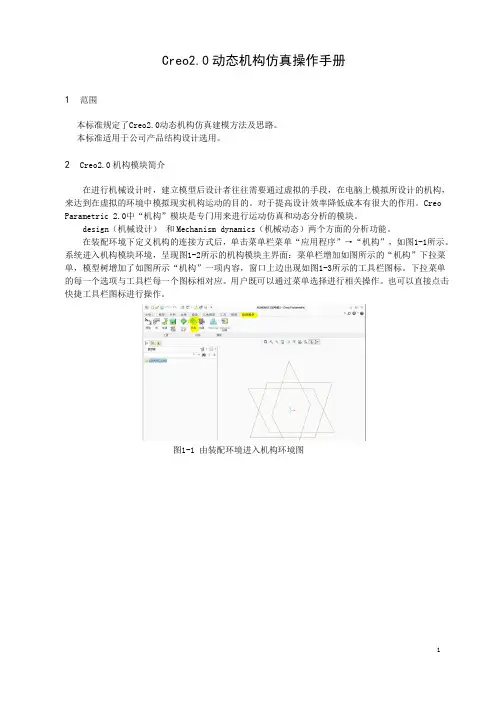
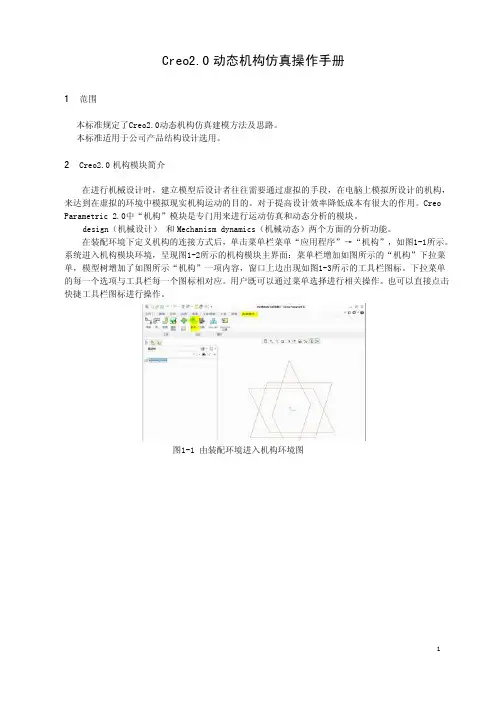
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。
Creo2。
0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2。
0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用.Creo Parametric 2。
0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
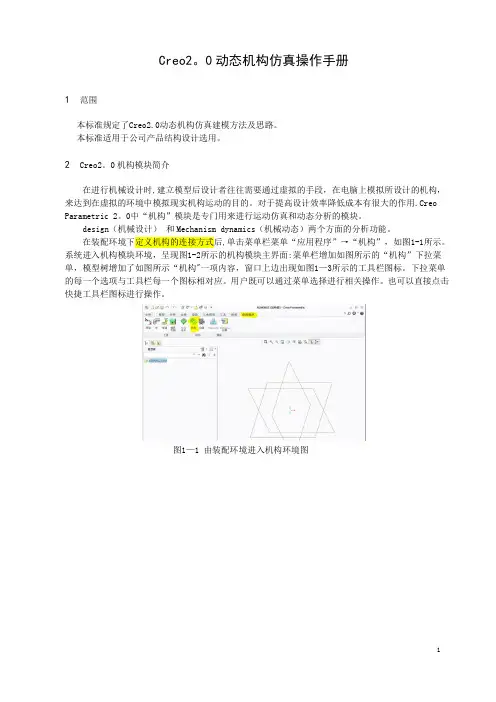
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构"一项内容,窗口上边出现如图1—3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1—1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单图1-4 模型树菜单如图 1—4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置"对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构.齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机"对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。


Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单图1-4 模型树菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
3凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D 接触从动机构连接”对话框,使用此对话框可创建新的3D 接触从动机构,也可编辑或删除现有的3D 接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
CREOPROE技巧集锦CREO(原称Pro/ENGINEER)是美国PTC公司开发的集计算机辅助设计、计算机辅助制造和计算机辅助工程分析于一体的三维实体建模工具。
在使用CREO进行设计时,有一些技巧可以帮助提高效率和准确性。
下面是一些常见的CREO、PROE技巧集锦:1.使用参数化建模:CREO具有参数化建模的能力,可以使用尺寸、关系和表格来定义实体的形状和特征。
这样做能够使模型具有可调性,方便后续的修改和优化。
2.使用工具栏和快捷键:CREO提供了丰富的工具栏和快捷键,方便用户快速调用常用功能。
可以根据自己的习惯设置自定义的快捷键,提高工作效率。
3.使用装配设计功能:在进行装配设计时,可以使用CREO的装配功能。
该功能可以帮助用户确定组件之间的关系和配合关系,快速完成装配设计。
4.使用草图和曲面建模:CREO不仅可以进行实体建模,还可以进行草图和曲面建模。
对于一些比较复杂的形状,可以使用草图和曲面建模进行更精细的调整和优化。
5.使用模块化设计:CREO提供了模块化设计的功能,可以将设计分为多个模块,每个模块独立设计,最后进行组合。
这样可以提高设计的可复用性和可维护性。
6.使用装配模式:CREO提供了不同的装配模式,如顶底视图、剖视图等。
可以根据需要选择合适的装配模式,帮助用户更清楚地了解装配的结构和关系。
7.使用自动约束:CREO提供了自动约束的功能,可以自动识别并添加适当的约束关系。
这样可以减少手动添加约束的工作量,提高设计效率。
8.使用标准件库:CREO提供了丰富的标准件库,可以直接使用这些标准件,而不需要重新设计。
这样可以节省设计时间,提高设计效率。
9.使用参数表和族表:CREO提供了参数表和族表的功能,可以根据需要批量生成不同尺寸和规格的设计。
这样可以提高设计的灵活性和适应性。
10.使用分析和优化功能:CREO提供了分析和优化的功能,可以对设计进行力学分析、热分析等,进而进行优化和改进。

Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图1图1-2 机构模块下的主界面图图1-3 机构菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
弹簧:打开“弹簧” 对话框,使用此对话框可定义弹簧,也可编辑、移除或复制现有的弹簧。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图图1-2 机构模块下的主界面图图1-3 机构菜单图1-4 模型树菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
动态机构仿真操作手册1 范围本标准规定了动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图图1-2 机构模块下的主界面图图1-3 机构菜单图1-4 模型树菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。
C r e o 2.0动态机构仿真操作手册(总55页)本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.MarchCreo2.0动态机构仿真操作手册1范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图图1-2 机构模块下的主界面图图1-3 机构菜单图1-4 模型树菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
Creo2.0动态机构仿真操作手册1 范围本标准规定了Creo2.0动态机构仿真建模方法及思路。
本标准适用于公司产品结构设计选用。
2 Creo2.0机构模块简介在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。
对于提高设计效率降低成本有很大的作用。
Creo Parametric 2.0中“机构”模块是专门用来进行运动仿真和动态分析的模块。
design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。
在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。
系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图所示的“机构”下拉菜单,模型树增加了如图所示“机构”一项内容,窗口上边出现如图1-3所示的工具栏图标。
下拉菜单的每一个选项与工具栏每一个图标相对应。
用户既可以通过菜单选择进行相关操作。
也可以直接点击快捷工具栏图标进行操作。
图1-1 由装配环境进入机构环境图图1-2 机构模块下的主界面图图1-3 机构菜单图1-4 模型树菜单如图 1-4所示的“机构树”工具栏图标和图1-3中下拉菜单各选项功能解释如下:连接轴设置:打开“连接轴设置”对话框,使用此对话框可定义零参照、再生值以及连接轴的限制设置。
凸轮:打开“凸轮从动机构连接”对话框,使用此对话框可创建新的凸轮从动机构,也可编辑或删除现有的凸轮从动机构。
3D 接触:打开“3D接触从动机构连接”对话框,使用此对话框可创建新的3D接触从动机构,也可编辑或删除现有的3D接触从动机构。
齿轮:打开“齿轮副”对话框,使用此对话框可创建新的齿轮副,也可编辑、移除、复制现有的齿轮副。
伺服电动机:打开“伺服电动机”对话框,使用此对话框可定义伺服电动机,也可编辑、移除或复制现有的伺服电动机。
执行电动机:打开“执行电动机”对话框,使用此对话框可定义执行电动机,也可编辑、移除或复制现有的执行电动机。