多体动力学仿真算例
- 格式:ppt
- 大小:507.00 KB
- 文档页数:19
MSC Adams是一种常用的多体动力学仿真软件,它可以用于研究和分析机械系统、运动学和动力学特性。
下面简要介绍MSC Adams的基础知识和实例解析:
1. 多体动力学基础:
-刚体和连接:MSC Adams使用刚体模型来表示物体,可以定义物体的质量、惯性矩阵和几何形状。
通过连接件(约束)将多个物体连接在一起,可以模拟各种机构系统。
-动力学模型:通过定义物体的受力和力矩,可以建立动力学模型。
这些力可以包括重力、摩擦力、弹簧力等,可以根据需要进行自定义。
-运动学分析:可以分析物体的位置、速度、加速度以及各个连接件之间的相对运动关系。
2. 实例解析:
-车辆悬挂系统:通过建立车辆悬挂系统的多体动力学模型,可以分析车轮与地面的接触力、悬挂系统的行程和动态响应等。
这有助于改善车辆的悬挂性能和乘坐舒适性。
-机械臂运动学和动力学分析:通过建立机械臂的多体动力学模型,可以分析机械臂在不同工作状态下的位姿、速度和加速度。
这有助于优化机械臂的设计和运动控制算法。
-飞机起落架系统:通过建立飞机起落架系统的多体动力学模型,
可以分析起落架在着陆和起飞时的动态响应和受力情况。
这有助于改进起落架的设计和耐久性。
-振动系统:通过建立振动系统的多体动力学模型,可以分析系统的固有频率、振动模态和受力情况。
这有助于评估结构的稳定性和设计适当的减振措施。
以上是MSC Adams多体动力学仿真的基础知识和一些实例解析。
通过使用MSC Adams,工程师和研究人员可以更好地理解和优化复杂机械系统的动力学特性。
基于RecurDyn的多体动力学仿真基于RecurDyn的多体动力学仿真大规模复杂的多体系统动力学问题,尤其是复杂的多接触问题是动力学分析的难点,本文对链式输送机构应用RecurDyn软件,在导入原有实体模型的基础上,快速构建仿真模型,结果另人满意。
产品开发工程师经常会遇到各种运动机构的动力学分析问题,有些情况过于复杂和特殊,特别是一些链式输送机构的动力学仿真问题,整个系统在高速的运动中涉及到的许多接触碰撞等受力情况会给系统的动力学求解带来极大的困难。
RecurDyn 是新一代的动力学分析软件,采用全新的运动方程理论和完全递归算法,非常适合于求解大规模复杂的多体系统动力学问题,尤其是复杂的多接触问题。
本文对某一形式的链式输送机构借助RecurDyn软件进行了动力学仿真。
一、系统建模该链式输送机构用于高速间歇状态下传输筒型物体,由于系统的运动主要是在一个平面的运动,因此输送带采用具有旋转约束的链节相互联接而成,链节之间加入扭转弹簧以反映平面内的扭转刚度。
每个链节依靠四个抱紧臂弹性固定着传输体,这四个抱紧臂通常可简化成弹性的悬臂曲梁,本例中简化成四个刚性铰接的小爪,并加上涡卷弹簧力,也可以很好地反映出实际情况。
机构的运动是通过输链器装置完成的,主要是通过上方拨动齿的往复运动和下方防止链条反向倒退的阻动齿来共同驱动的。
由于上方拨动齿的位置尚需精确的定位,故将上方拨动齿的运动简化为水平方向的牵引运动。
仿真模型的建立是在导入原有三维精确实体模型的基础上,用RecurDyn提供的多级子系统建模和空间多接触面定义快速构建出的,如图1、图2所示,并在此基础上添加力、碰撞、运动副等约束条件。
由于该机构是高速间歇运动,因此采用一系列分段的时间与运动位移坐标来输入运动参数。
图1 经简化的一对空链节模型二、仿真分析1.运动状态与干涉校验首先必须考虑到链条柔度对运动的干涉影响,即考虑到在设计的平面柔度和扭转柔度范围内,长链条和最后只剩单个链节情况下,链节进入输链器装置内的运动状态,避免被卡住或干涉撞击引起抱紧臂变形。
某型军用车辆整车的多体动力学建模与仿真某型军用车辆整车的多体动力学建模与仿真作者:北方车辆研究所王军摘要:将虚拟样机技术应用于履带车辆系统。
充分考虑碰撞、摩擦等复杂因素的存在,建立了履带车辆系统虚拟样机分析的力学模型,生成了路面文件。
对整车进行动态仿真分析、运动学和动力学分析,获得了整车系统构件在运行过程中的性能曲线,从而可以对车辆系统在运行过程中的动态性能、动态响应和动载荷等,进行全面的评估和安全分析。
给出了车辆行走姿态的动画演示过程,进行了碰撞检测、故障再现、干涉检查。
关键词:多体动力学仿真军用车辆1 引言履带车辆由于其零部件数量多,机构运动关系复杂,加上有大量极难研究的碰撞、摩擦存在,长期以来很难建立描述车辆整体性能的整车模型。
在过去对整车系统模型研究过程中,往往将零部件不规则曲面间碰撞后的作用视为连续接触,这与实际情况并不完全相符。
由于车辆中存在诸多通过接触传递力和运动的零部件,碰撞作用较多,对碰撞过程连续接触的假设将在很大程度上影响计算精度。
随着多体系统动力学理论的迅速发展,使得借助动力学仿真软件在计算机上对整车系统进行仿真研究成为可能。
约束反力是很难计算的一类力,部件(如平衡肘轴、负重轮、减振器等)的作用在不同时刻将发生不同的变化,因此约束反力将反映许多作用的综合结果,以前用传统理论和手段很难较精确地对约束反力加以计算,虚拟样机技术很好地解决了这一问题。
通过计算获得了重点零部件受力大小的时间历程,可以看到冲击引起的尖峰载荷。
此外对运动范围进行了干涉检查、碰撞检测、故障再现。
在方案设计阶段用履带车辆的工具箱——ATV(Adams Tracked Vehicle)对整车进行动力学仿真,对于某型步兵战车来说,意义非常重要。
对于行动部分的薄弱环节是否满足刚强度要求,需要利用仿真软件提前获得行动部分薄弱环节的受力情况、冲击响应特性。
再利用相关分析软件与工具进行校核,加强或改进薄弱环节的设计,能够提高整车性能与可靠性,节约经费与时间,对于及时保证研制任务的按计划完成、少走弯路具有重要意义。
柴油机曲轴多体动力学仿真分析张鹏伟罗国良李京鲁(潍柴动力杭州分公司杭州学院路50号310012)摘要:通过有限元子结构和多体动力学方法,建立了机体、曲轴多体动力学模型。
在A VL Excite Power Unit仿真平台上,对模型进行多体动力学仿真求解,由仿真计算得到了,曲轴前后端振动特性、轴承负荷及曲轴工作动态应力。
关键词::曲轴多体动力学关键词主要软件::A VL Excite Power Unit主要软件1 前言多体动力学是研究柔性体和刚性体组成的系统在空间运动过程中动力学行为的一门学科。
传统的曲轴分析是在对各个构件进行分析的基础上,计算出各自产生的旋转惯性力和往复惯性力,与爆发压力合成后求解出对机体的作用力以及曲轴系振动,在这个计算过程中往往需要对模型进行大量的简化。
A VL EXCITE PU软件是一种建模高效的多体动力学软件,是内燃机详细设计过程中不可或缺的动力学分析软件,能有效的分析各个结构件的动力学响应特性。
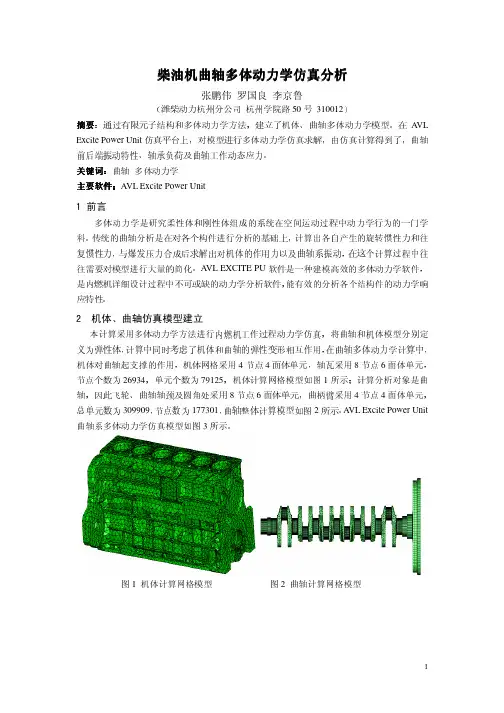
2机体、曲轴仿真模型建立本计算采用多体动力学方法进行内燃机工作过程动力学仿真,将曲轴和机体模型分别定义为弹性体,计算中同时考虑了机体和曲轴的弹性变形相互作用,在曲轴多体动力学计算中,机体对曲轴起支撑的作用,机体网格采用4节点4面体单元,轴瓦采用8节点6面体单元,节点个数为26934,单元个数为79125,机体计算网格模型如图1所示;计算分析对象是曲轴,因此飞轮、曲轴轴颈及圆角处采用8节点6面体单元,曲柄臂采用4节点4面体单元,总单元数为309909,节点数为177301,曲轴整体计算模型如图2所示。
A VL Excite Power Unit 曲轴系多体动力学仿真模型如图3所示。
图1 机体计算网格模型图2 曲轴计算网格模型图3 曲轴多体动力学仿真模型3 计算结果3.13.1 机体模态计算结果机体模态计算结果此多体动力学计算过程中对机体提取了20阶模态进行计算,此处给出机体前二阶模态如图4、5所示。
多体系统动力学计算方法概述一些动力学软件处理机械系统动力学问题时,根据系统不同特性选择不同求解方法:对于刚性系统,直接进行微分代数方程(DAE)求解;对于高频系统,则通过坐标分离法简化DAE方程为常微分方程(ODE),再进行求解。
一、DAE求解方法通过引入u=,将多体系统动力学方程改成一般形式如下:定义状态变量y=[q T u TγT]T,式(1.39)可进一步写为单一矩阵方程:DAE通常具有强非线性、刚性特点,一些动力学软件采用的是变系数的向后微分公式(BDF)刚性积分方法,提供了GSTIFF、WSTIFF 和CONSTANT_BDF多种刚性积分器。
BDF刚性积分方法是一种预估校正法,在每一步积分求解时均使用了修正的牛顿-拉夫森(Newton -Raphson)迭代法,其求解过程如下。
1.预估阶段首先,根据泰勒级数预估下一时刻的系统状态值,泰勒展开式为式中,h=t n+1-t n为时间步长。
通常,这种预估算法得到的下一时刻系统状态并不准确,可以使用向后差分积分方法进行校正。
在此使用Gear积分方法进行校正:式中,y n+1是t=t n+1时刻的近似值;β0和αi均是Gear积分方法的参数。
2.校正阶段将预估的状态值y代入系统动力学方程g(y,,t)=0进行验证,如果满足g=0,那么y即为方程的解。
否则采用修正的Newton -Raphson法进行迭代求解,其迭代校正表达式为式中,J为系统的雅可比(Jacobian)矩阵。
3.误差控制阶段将预估和校正值间的误差与误差精度比较,如果小于规定的误差精度,进行下一时刻的计算求解。
否则舍弃此解,并且优化积分步长和阶数,重新由第一步开始进行预估-校正步骤。
当达到设定的仿真结束时间,停止计算。
二、ODE求解方法对于多数类型的多体系统动力学方程,将其转换为n维一阶常微分方程组为因此,仿真计算的直接数值方法可归纳为对常微分方程组初值问题的求解。
利用欧拉方法,通过化导数为差商可将式写为1.龙格-库塔法作为求解非线性常微分方程重要的一类隐式或显式迭代法,龙格-库塔法(Runge-Kutta)仅需已知一阶导数值,可由式求得。
多体系统动力学建模与仿真研究引言:多体系统是指由多个物体组成的系统,在物理学、工程学和计算机科学等领域中占有重要地位。
多体系统的动力学建模与仿真研究是研究多体系统运动规律和行为的关键步骤,对于理解和预测多体系统的运动性质具有重要意义。
在本文中,我们将探讨多体系统动力学建模与仿真研究的方法和应用。
一、多体系统动力学建模动力学建模是将所研究的物理系统转化为一组数学方程的过程。
多体系统动力学建模的目标是根据系统的几何结构、物体之间的相互作用和外部力的作用,推导出描述系统运动的微分方程或离散方程。
常用的建模方法有拉格朗日方法和牛顿-欧拉方法。
拉格朗日方法基于广义坐标和拉格朗日函数,通过描述系统的能量和作用力,建立描述系统运动的拉格朗日方程。
这种方法适用于描述刚体动力学和刚性接触的多体系统。
牛顿-欧拉方法是基于牛顿第二定律和欧拉方程,通过描述物体的动量和力矩,建立描述系统运动的牛顿-欧拉方程。
这种方法适用于描述弹性接触的多体系统和流体力学问题。
二、多体系统动力学仿真动力学仿真是利用计算机模拟多体系统的运动过程。
通过将建模得到的微分方程或离散方程数值求解,可以得到系统的状态随时间的演化。
多体系统动力学仿真可分为离散时间仿真和连续时间仿真。
离散时间仿真将连续时间系统离散化成离散时间点的状态,并使用离散时间步长进行时间积分。
这种方法适用于考虑粒子碰撞和接触力的系统仿真,如行星运动和颗粒流动。
连续时间仿真是在连续时间范围内对系统状态进行数值积分,直接模拟系统的连续运动过程。
这种方法适用于需要较高时间精度的系统仿真,如机械系统和液体流动。
三、多体系统动力学建模与仿真的应用多体系统动力学建模与仿真在工程、物理学和生物学等领域具有广泛应用。
在工程领域,动力学建模与仿真可用于预测结构的振动特性、研究机械系统的运动稳定性和控制方法。
例如,研究汽车悬挂系统的动力学特性,可以帮助优化悬挂系统设计,提高行车舒适性和操控性。
在物理学领域,动力学建模与仿真可用于研究材料的力学性质和物理现象。
多体动力学模型的建立与仿真分析引言:在工程和科学领域中,多体动力学模型是一种重要的数学工具,可用于研究物体之间的相互作用及其运动。
通过建立动力学模型,我们可以预测和分析机械系统、生物系统以及其他复杂系统的运动行为,为设计优化和问题解决提供理论基础。
本文将探讨多体动力学模型的建立与仿真分析,并介绍一些常用的建模方法和仿真工具。
一、多体动力学模型的基础理论多体动力学模型是基于物体之间的相互作用力和牛顿定律建立的。
牛顿第二定律指出,物体的加速度与作用在其上的合力成正比,反比于物体的质量。
根据牛顿第二定律,我们可以建立物体的运动方程,并通过求解这些方程来获得物体的运动状态。
二、建立多体动力学模型的方法在建立多体动力学模型时,我们通常需要考虑以下几个方面:物体的几何形状、质量分布、刚度特性以及相互作用力。
根据系统的特点和需求,可以选择不同的建模方法,如刚体模型、弹性模型和柔性模型等。
1. 刚体模型刚体模型适用于研究刚性物体的运动行为,忽略物体的变形和弹性特性。
刚体模型的建立较为简单,可以通过描述物体的质心位置、质量及转动惯量等参数来确定物体的运动状态。
2. 弹性模型弹性模型适用于研究具有弹性变形行为的物体。
在弹性模型中,我们需要考虑物体的形变和应力分布。
常用的弹性模型包括弹簧-质点模型、有限元模型等。
这些模型可以通过描述物体的刚度特性和弹性系数等参数来确定物体的运动状态。
3. 柔性模型柔性模型适用于研究高度柔性的物体,如绳子、软体机器人等。
在柔性模型中,我们需要考虑物体的非线性变形和材料特性。
常用的柔性模型包括有限元模型、质点模型等。
这些模型可以通过描述物体的形变、材料刚度和阻尼特性等参数来确定物体的运动状态。
三、多体动力学模型的仿真分析建立了多体动力学模型后,我们可以通过数值仿真来模拟和分析系统的运动行为。
常用的多体仿真工具包括MATLAB/Simulink、ADAMS、EULER等。
这些仿真工具提供了丰富的建模和分析功能,可以帮助我们在不同应用领域进行系统设计和性能优化。
abaqus多体动力学实例
以下是一些ABAQUS多体动力学的实例:1. 碰撞分析:使用ABAQUS进行车辆碰撞分析,通过模拟车辆间的碰撞来评估车辆的安全性能。
该分析可以帮助设计师了解碰撞对车辆结构和乘员安全的影响。
2. 机器人动力学分析:使用ABAQUS进行机器人动力学分析,通过建立机器人的几何模型和运动学模型,预测机器人在工作过程中的运动特性和力学行为,为机器人设计和控制提供参考。
3. 风力发电机塔架分析:使用ABAQUS对风力发电机塔架进行动力学分析,包括风荷载、地震和振动等外部载荷的作用。
通过该分析可以评估塔架的稳定性和结构强度,为风力发电机的设计和安装提供依据。
4. 舰船耐冲击分析:使用ABAQUS对舰船在碰撞或爆炸等外部冲击载荷下的动力学行为进行分析。
该分析可以帮助船舶设计师设计出更加耐冲击的船体结构,提高船舶在恶劣环境下的安全性能。
5. 建筑物结构振动分析:使用ABAQUS对建筑物结构在风荷载或地震作用下的动力学响应进行分析。
通过该分析可以评估建筑物的结构强度和稳定性,为建筑物的设计和改进提供指导。
柔性多体动力学模型建立与仿真分析一、引言柔性多体动力学模型是描述机器人、航天器、汽车等复杂系统运动和变形的重要工具,它能够准确地模拟系统的非线性动力学行为。
在科学、工程和军事等领域,准确理解和预测系统的运动行为对于设计和优化系统至关重要。
本文将探讨柔性多体动力学模型的建立与仿真分析。
二、柔性多体动力学模型的基本原理柔性多体动力学模型是由刚体和柔性体组成的,刚体用于描述系统的几何形状和质量分布,而柔性体则用于描述系统的弹性变形。
在建立柔性多体动力学模型时,需要考虑以下几个方面。
1. 刚体动力学模型刚体动力学模型主要由刚体质量、质心位置、惯性矩阵和外力矩阵等参数组成。
通过牛顿-欧拉方程,可以求解刚体的运动学和动力学参数。
2. 柔性体动力学模型柔性体动力学模型主要由弹性变形方程、弹性势能和形变能等参数组成。
通过拉格朗日方程,可以求解柔性体的运动学和动力学方程。
3. 位形坐标描述在建立柔性多体动力学模型时,需要选择合适的位形坐标描述模式。
常用的位形坐标描述模式有欧拉角、四元数和拉格朗日点坐标等。
三、柔性多体动力学模型的建立1. 刚体建模在刚体建模中,需要确定刚体的质心位置、惯性矩阵和外力矩阵等参数。
通过对刚体进行转动惯量测量、质心定位和精确测力等实验,可以得到准确的参数值。
2. 柔性体建模柔性体建模是建立柔性多体动力学模型的关键步骤之一,通过选择合适的柔性体模型和参数,可以准确地描述系统的弹性变形。
常用的柔性体模型包括弯曲梁模型、剪切梁模型和薄板模型等。
通过有限元分析和实验测试,可以获取柔性体的弹性参数和模态特性。
3. 使用有限元方法建立模型有限元方法是建立柔性多体动力学模型的常用方法,它通过将柔性体划分为有限个单元,利用单元间的相对位移和应变关系,求解节点的位移和形变。
通过有限元方法建立的模型,能够在较高的精度下反应系统的运动和变形情况。
四、柔性多体动力学模型的仿真分析1. 动力学仿真通过动力学仿真,可以模拟柔性多体系统受到外力作用下的运动行为。
实验报告实验名称: 基于RecurDyn 的铰接式履带坦克转弯性能分析学院机械工程学院专业班级机自101姓名学号2012年 4月11日摘要:基于多体动力学仿真软件RecurDyn,建立了某型履带车辆行动部分虚拟样机模型.对履带车辆在硬质水泥路面上,由静止加速到目标车速并匀速行驶的过程进行了仿真分析.提取车辆匀速行驶阶段侧减速器被动轴上测点的转矩响应时间历程并与相同路面、速度工况下的车辆实车试验相应测点的动态转矩测试数据进行比对验证了模型的准确性。
为下一步实现车辆动力-传动-行动装置联合仿真提供基础。
关键词: 履带车辆; RecurDyn;前言:履带车辆在现代战争中发挥着举足轻重的作用,但因其机械系统复杂,使用环境多变如果基于传统的经验结合实验的方法对其性能进行研。
通常周期比较长,耗费大。
随着虚拟样机技术的发展及多体动力学分析软件的出现,对履带车辆动力学性能的研究,可以通过建立准确的虚拟样机模型进行多种工况下的虚拟测试来实现对降低试验成本,缩短研制周期具有重要意义.1、履带车辆行动部分虚拟样机建模虚拟样机分析软件RecurDyn,以多体系统动力学理论为基础,采用相对坐标系运动方程理论与完全递归算法减少了绝对坐标体系中约束方程的数量,适于求解大规模复杂的多体系统动力学问题.其高速履带系统工具包Track /LM,包括了主动轮、诱导轮、负重轮、托带轮、高速履带等各履带行驶系统组件,可以方便快速地实现对车辆行动部分的精确建模。
同时利用其提供的Ground模块可建立各种道路模型。
1. 1 行动部分零部件几何建模及组装履带车辆行动部分虚拟样机模型由车体、主动轮、诱导轮、负重轮、托带轮、履带等零部件组成.基于RecurDyn 提供的CAD 实体建模界面,可方便地建立车体几何模型; 履带车辆含有两条履带子系统,每条履带系统包括1 个主动轮、1 个诱导轮、7 个负重轮、3个拖带轮和35 块履带板,履带板采用双销式链接; 车辆主动轮采用前置方式,主动轮齿数为21。
飞机内襟翼运动机构多体动力学仿真分析模型王慧喻天翔崔卫民宋笔锋(西北工业大学航空学院西安,710072)摘要:本文在LMS b Motion平台上建立了几种飞机内襟翼运动机构多体运动学和动力学仿真分析模式,通过对比全刚性体仿真模型、基于滑轨柔性体仿真模型、基于襟翼柔性体仿真模型以及滑轨和襟翼均为柔性体仿真模型的分析结果,意在说明对飞机内襟翼等大型复杂运动结构建立多体动力学仿真模型的流程及方法,为下一步进行大型复杂运动机构运动学及动力学可靠性的分析和探讨提供计算仿真模型的依据。
关键词:内襟翼;多体动力学;仿真;Virtual Motion1、概述由于运动机构不仅要承受和传递载荷,而且还必须完成相应的运动功能,使得机构可靠性问题更具有特殊性,研究难度更大,是目前机械可靠性领域的一个薄弱环节。
一些大型复杂运动机构如襟缝翼运动机构、起落架收放机构等与飞机的安全性有着密切的关系,在其寿命周期内安全可靠地工作是飞机安全性分析与设计中必须要考虑的关键问题。
对于大型飞机上的复杂运动机构,有着复杂载荷环境和结构特性,例如民机的襟翼与滑轨等的支撑机构都固定在机翼上,在飞行过程中,机翼、襟翼和滑轨的变形量都很大(特别对于大型飞机,例如伊尔76的翼尖的最大变形达到1m,某襟翼滑轨的最大变形达到20cm),因此,必须要考虑各种复杂的非线性因素、柔性因素和边界与结合部效应等因素,才能建立更符合工程实际的机构运动学和动力学计算机仿真模型。
同时这也是大型复杂运动机构概率分析的基础。
基于此本文拟针对某内襟翼运动机构,考虑其刚柔耦合特性,在LMS b平台上建立多体动力学运动学和动力学的仿真模型,通过探讨对复杂运动机构的建模处理模式,为进一步进行复杂运动机构概率分析方法研究提供依据。
2、内襟翼连接关系和边界条件分析在LMS Virtual. Lab Motion平台上将内襟翼CATIA CAD模型进行转换,使得该模型包含多个part部分,重新装配这些部件以便进行运动学及动力学仿真。