机械设计第二章
- 格式:pptx
- 大小:290.61 KB
- 文档页数:5
机械设计基础第2章平面机构及其自由度平面机构是指由连续两个或几个构件组成的,构件之间只能相对运动而不能相对滑动的机械系统。
平面机构在机械设计中具有重要的地位和作用,对机械的运动与动力传递起着关键性的作用。
平面机构的自由度是指机构的可变参数个数,它决定了机构的端点能自由变动的方向和个数。
下面将对平面机构及其自由度进行详细介绍。
首先,平面机构是由构件和连接件组成的。
构件是构成机构的各个部分,如杆件、连杆、曲柄等;连接件是将构件连接起来的元件,如轴、销、螺钉等。
平面机构由构件和连接件组成的方式非常多样,常见的有链条、带传动、蜗杆传动等。
其次,平面机构的自由度是指机构中能够自由变动的独立参数的个数。
平面机构的自由度可以通过基本的“Grubler准则”来判断,该准则规定了平面机构的自由度与机构的构件数量、构件之间的连接方式以及约束关系有关。
根据Grubler准则,平面机构的自由度F可以由以下公式计算得出:F=3n-2j-h其中,n为构件的个数,j为构件之间的约束关系的个数,h为连接件的个数。
通过计算可以得出平面机构的自由度,进而可以判断机构的运动性能以及机构的设计是否合理。
进一步说,平面机构的自由度决定了机构的运动性能和应用范围。
例如,当机构的自由度为0时,表示机构不能进行自由运动,仅能进行固定运动,此时机构称为完全约束机构;当机构的自由度为1时,表示机构可以在一个平面内自由变动,即平移运动,此时机构称为平动机构;当机构的自由度为2时,表示机构可以在一个平面内同时进行转动和平移运动,此时机构称为空间机构。
最后,平面机构的自由度也与机构的稳定性有关。
在机构设计中,稳定性是指机构在工作过程中能够保持良好的运动性能和结构稳定性。
对于平面机构,当自由度与约束关系的个数相等时,机构处于临界平衡状态,稳定性最差,容易产生摇摆和不稳定的运动;当自由度小于约束关系的个数时,机构稳定性较好,能够稳定地进行运动。
综上所述,平面机构是机械设计中重要的内容之一,它的自由度决定了机构的运动性能和应用范围,而稳定性则保证了机构的正常工作。

第2章平面连杆机构2.1平面连杆机构的特点和应用连杆机构是由若干刚性构件用低副连接组成的机构,又称为低副机构。
在连杆机构中,若各运动构件均在相互平行的平面内运动,称为平面连杆机构;若各运动构件不都在相互平行的平面内运动,则称为空间连杆机构。
平面连杆机构被广泛应用在各类机械中,之所以广泛应用,是因为它有较显著的优点:(1)平面连杆机构中的运动副都是低副,其构件间为面接触,传动时压强较小,便于润滑,因而磨损较轻,可承受较大载荷。
(2)平面连杆机构中的运动副中的构件几何形状简单(圆柱面或平面),易于加工。
且构件间的接触是靠本身的几何约束来保持的,所以构件工作可靠。
(3)平面连杆机构中的连杆曲线丰富,改变各构件的相对长度,便可使从动件满足不同运动规律的要求。
另外可实现远距离传动。
平面连杆机构也存在一定的局限性,其主要缺点如下:(1)根据从动件所需要的运动规律或轨迹设计连杆机构比较复杂,精度不高。
(2)运动时产生的惯性力难以平衡,不适用于高速的场合。
(3)机构中具有较多的构件和运动副,则运动副的间隙和各构件的尺寸误差使机构存在累积误差,影响机构的运动精度,机械效率降低。
所以不能用于高速精密的场合。
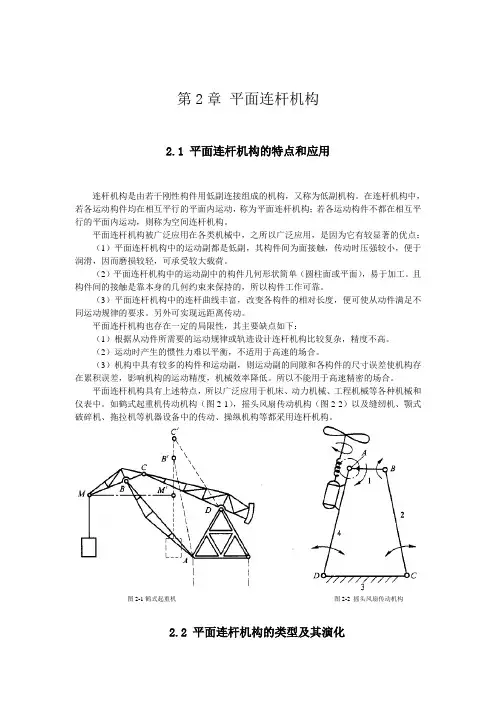
平面连杆机构具有上述特点,所以广泛应用于机床、动力机械、工程机械等各种机械和仪表中。
如鹤式起重机传动机构(图2-1),摇头风扇传动机构(图2-2)以及缝纫机、颚式破碎机、拖拉机等机器设备中的传动、操纵机构等都采用连杆机构。
图2-1鹤式起重机图2-2 摇头风扇传动机构2.2平面连杆机构的类型及其演化2.2.1 平面四杆机构的基本形式全部用转动副组成的平面四杆机构称为铰链四杆机构,如图2-3所示。
机构的固定件4称为机架;与机架相联接的杆1和杆3称为连架杆;不与机架直接联接的杆2称为连杆。
能作整周转动的连架杆,称为曲柄。
仅能在某一角度摆动的连架杆,称为摇杆。
按照连架杆的运动形式,将铰链四杆机构分为三种基本型式:曲柄摇杆机构、双曲柄机构和双摇杆机构。
第2章平面机构运动简图及自由度计算机械是替代人类完成各项体力劳动甚至脑力劳动的执行者。
在各种新型机械的设计初期,首先需要采用机械系统运动简图来对比各种运动方案及工作原理,一边从中选出最佳的设计方案。
然后再按照运动要求确定及其各组成构件的主要尺寸,按照强度条件和工作情况确定机构个部分的详细结构尺寸。
机械系统的运动简图设计是设计机械产品十分重要的内容,正确、合理地设计机械系统简图,对于满足机械产品的功能要求,提高性能和质量,降低制造成本和使用费用等是十分重要的。
机械系统要完成比较复杂的运动,一般都需要将若干个机构根据机械系统的运动协调配合的要求组合起来,因此机械系统的运动简图也是机构系统的运动简图。
机械系统的运动简图是用规定的符号,绘出能准确表达机构各构件之间的相对运动关系及运动特征的简单图形。
一般某机构可分为平面机构和空间机构。
平面机构是指各运动构件均在同意平面或相互平行平面内运动的机构。
空间机构是指虽有的机构不完全是相互平行的平面内运动的机构。
本章将着重介绍机构的结构分析。
第一节机构的组成构件任何机器都是由若干个零件组装而成的。
构件是指组成机械的各个相对运动的单元。
构件和零件的概念是有区别的。
构件是机械中的运动单元体,零件则是机械中不可拆分的制造单元体。
构件可以是一个零件,也可以是由两个或两个以上的零件组成。
如图2-1所示的内燃机中的连杆就是由单独加工的连杆体、轴套、连杆头、轴瓦、螺杆、螺母等零件组成的,这些零件分别加工制造,但是当它们装配成连杆后则作为一个整体在发动机内部作往复运动相互之间并不产生相对运动,因此连杆可以看做一个构件。
因此,从运动角度来看,任何机器都是许多独立运动单元组合而成的,这些独立运动单元体称为构件。
从加工制造角度来看,任何机器都是由许多独立制造单元体组合而成的,这些独立制造单元体称为零件。
通常,为了完成同一使命而在结构上组合在一起并协同工作的零件称为部件,如联轴器、减速器等。