约 束 组成运动副后,构件的某些独立运动受到限制,构件自由
度减少,这种对构件独立运动的限制称为约束
❖ 对构件施加
的约束个数等于 其自由度减少的 个数。
编辑版pppt
6
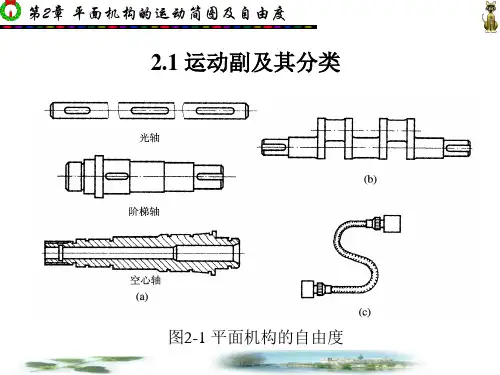
低副
转动副
组成运动副的两个构件只能 在一个平面内做相对转动,
也称铰链
移动副
两构件通过面接触
若组成运动副的两个构件 只能沿轴线相对移动
ω
编辑版pppt
38
图 2 - 19 原动件数小于F
如果原动件数大于自
2
由度数, 则运动链中
最薄弱的构件或运动
3
副可能被破坏, 也不
能成为机构, 如图2 -
1
20所示。
4 图 2 - 20原动件数大于F
编辑版pppt
39
结论
机构的自由度 —— 机构所具有的独立运动的数目。 ◆由上可知:
1)F<=0 机构蜕化成刚性桁架,无相对运动。 2)F>0 如原动件数大于机构自由度数——损坏
转动副: 偏心轮1和杆件2 杆件2和杆件3 杆件3和杆件4 滑块7和压杆8 槽凸轮6—齿轮6‘和机座9 杆件4和滚子5 机座9和偏心轮1—齿轮1’ 移动副 杆件3和机座9 杆件4和滑块7 压杆8和机座9 高副 齿轮1‘和齿轮6’ 滚子5和槽凸轮6
编辑版pppt
23
编辑版pppt
24
第三节 常用机械传动机构
机构 在运动链中,若选定某构件为机架,且各
构件具有确定的相对运动,则称该运动链为机构。
平面机构 机构中各构件的运动平面互相平行 空间机构
机构中至少有一构件不在相互平行的平面上运动,或
至少有一构件能在三维空间中运动
机 架 机构中的固定构件;一般机架相对地面固定不