LWL_120扒渣机扒渣装置运动学和动力学仿真分析_郭年琴
- 格式:pdf
- 大小:651.73 KB
- 文档页数:3
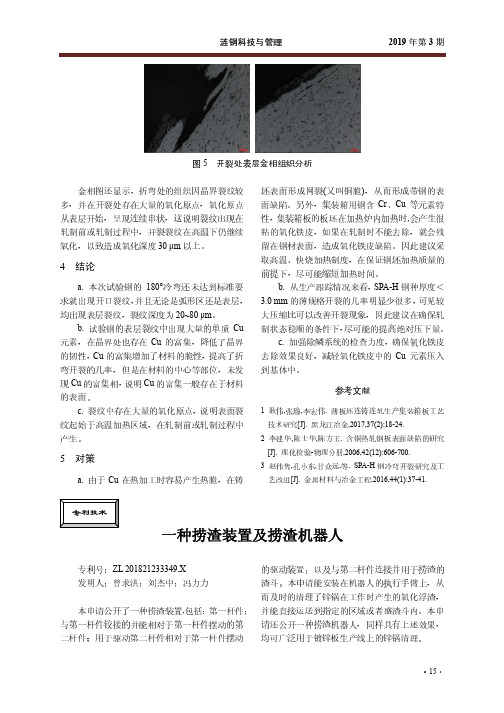
涟钢科技与管理 2019年第3期·15·图5 开裂处表层金相组织分析金相图还显示,折弯处的组织因晶界裂纹较多,并在开裂处存在大量的氧化原点,氧化原点从表层开始,呈现连续串状,这说明裂纹出现在轧制前或轧制过程中,开裂裂纹在高温下仍继续氧化,以致造成氧化深度30 µm 以上。
4 结论a. 本次试验钢的180°冷弯还未达到标准要求就出现开口裂纹,并且无论是弧形区还是表层,均出现表层裂纹,裂纹深度为20~80 µm 。
b. 试验钢的表层裂纹中出现大量的单质Cu元素,在晶界处也存在Cu 的富集,降低了晶界的韧性,Cu 的富集增加了材料的脆性,提高了折弯开裂的几率,但是在材料的中心等部位,未发现Cu 的富集相,说明Cu 的富集一般存在于材料的表面。
c. 裂纹中存在大量的氧化原点,说明表面裂纹起始于高温加热区域,在轧制前或轧制过程中产生。
5 对策a. 由于Cu 在热加工时容易产生热脆,在铸坯表面形成网裂(又叫铜脆),从而形成带钢的表面缺陷。
另外,集装箱用钢含Cr 、Cu 等元素特性,集装箱板的板坯在加热炉内加热时,会产生很粘的氧化铁皮,如果在轧制时不能去除,就会残留在钢材表面,造成氧化铁皮缺陷。
因此建议采取高温、快烧加热制度,在保证钢坯加热质量的前提下,尽可能缩短加热时间。
b. 从生产跟踪情况来看,SPA-H 钢种厚度<3.0 mm 的薄规格开裂的几率明显少很多,可见较大压缩比可以改善开裂现象,因此建议在确保轧制状态稳顺的条件下,尽可能的提高绝对压下量。
c. 加强除鳞系统的检查力度,确保氧化铁皮去除效果良好,减轻氧化铁皮中的Cu 元素压入到基体中。
参考文献1 耿伟,张瑜,李宏伟. 薄板坯连铸连轧生产集装箱板工艺技术研究[J]. 黑龙江冶金,2017,37(2):18-24.2 李建华,陈士华,陈方玉. 含铜热轧钢板表面缺陷的研究[J]. 理化检验-物理分册,2006,42(12):606-700.3 赵伟隽,孔小东,甘众远,等. SPA-H 钢冷弯开裂研究及工艺改进[J]. 金属材料与冶金工程,2016,44(1):37-41.一种捞渣装置及捞渣机器人专利号:ZL 201821233349.X 发明人:曾求洪;刘杰中;冯力力本申请公开了一种捞渣装置,包括:第一杆件;与第一杆件铰接的并能相对于第一杆件摆动的第二杆件;用于驱动第二杆件相对于第一杆件摆动的驱动装置;以及与第二杆件连接并用于捞渣的渣斗。
清洗装置毛刷辊动力学分析
清洗装置的动力学定性分析主要包括毛刷辊回转动力分析、弯曲产生离心力分析。
理想状态下,可将毛刷辊视为圆柱体,运动稳定,但在实际生产过程中,两侧墙板加工过程中不可能完全同心,而从机械动力学角度分析,当高速旋转的刚体在做规则进动时所产生的陀螺压力远远大于理想运动时所产生的压力。
因此,需要分别从墙板偏心量和弯曲变形的角度出发,研究单一因素对毛刷辊的机械性能的影响。
研究对喷刷式橡皮布清洗装置中的毛刷辊固定装置加工和安装误差以及毛刷辊的弯曲影响等进行了分析,得出毛刷辊与橡皮滚筒之间的压力为1. 95MPa,即毛刷辊静止状态下在橡皮滚筒上的压痕为9mm时,清洗效果最佳;两墙板孔中心偏移量的微小变化都能引起清洗装置两侧固定装置支撑力的成倍增加,严重影响清洗装置的工作效率和使用寿命。
而毛刷辊中轴微量的弯曲对毛刷辊挠度影响较小。
因此,提高两墙板孔位置的加工精度对机器的使用和改进设计具有重要意义。
(本文档由旺达毛刷厂分享,原文参考地址:/content/?326.html 欢迎定制各类毛刷!)。
剪叉升降平台设计与多体动力学仿真分析
毕涛;吕淳;刘笠
【期刊名称】《科技创新与应用》
【年(卷),期】2024(14)5
【摘要】该文针对变电站检修工作环境设计一款液压驱动的剪叉升降平台,该平台为对称结构,工作平台为U型结构,可同时容纳2人进行检修工作。
为通过虚拟样机技术对该升降平台进行结构分析与优化,首先在SolidWorks中建立该升降平台3D 模型,并将其转化为Parasolid文件导入多体动力学仿真软件RecurDyn中,在RecurDyn中建立该升降平台动力学模型,进行动力学仿真求解,通过后处理分析获得液压缸推力曲线、剪叉臂及其连接轴受力状况,为后续结构优化提供参考。
【总页数】4页(P61-64)
【作者】毕涛;吕淳;刘笠
【作者单位】江苏省送变电有限公司
【正文语种】中文
【中图分类】TH211.6
【相关文献】
1.对称驱动剪叉液压升降平台的动力学仿真
2.液压剪叉升降平台动力学仿真分析
3.基于ANSYS分析的剪叉式液压升降平台剪叉臂结构优化设计
4.剪叉式升降平台起升速度液压控制系统设计与仿真分析
5.剪叉式升降工作平台动力学仿真分析
因版权原因,仅展示原文概要,查看原文内容请购买。
第51卷㊀第6期2023年6月㊀㊀林业机械与木工设备FORESTRYMACHINERY&WOODWORKINGEQUIPMENTVol51No.6Jun.2023研究与设计基于振动采收的油橄榄树动力学仿真分析梁明清1ꎬ㊀贾秋霜2ꎬ㊀岳元满1ꎬ㊀何存财1ꎬ㊀黄晓鹏1ꎬ㊀万芳新1∗(1.甘肃农业大学机电工程学院ꎬ甘肃兰州730070ꎻ2.潍坊职业学院ꎬ山东潍坊262737)摘㊀要:为研制机械振动式油橄榄收获机而针对油橄榄的振动采收进行了动力学仿真分析ꎮ根据油橄榄树的基本参数和树形结构ꎬ利用SOLIDWORKS软件进行树体三维模型的建立和简化ꎬ再使用ANSYSWorkbench对油橄榄树进行了模态分析和谐响应分析ꎮ由模态分析得到油橄榄树前10阶固有频率ꎬ并确定最佳激振力振动频率范围为18~21Hzꎻ由谐响应分析可知最佳激振力大小为2000Nꎬ最佳激振高度为800mmꎬ最佳激振频率为20Hzꎮ结论可为机械振动式油橄榄收获机的设计提供理论依据ꎮ关键词:油橄榄ꎻ机械振动ꎻ模态分析ꎻ谐响应分析中图分类号:S225.93㊀㊀文献标识码:A㊀㊀文章编号:2095-2953(2023)06-0045-06DynamicsimulationanalysisofolivetreebasedonvibrationharvestingLIANGMing ̄qing1ꎬJIAQiu ̄shuang2ꎬYUEYuan ̄man1ꎬHECun ̄cai1ꎬHUANGXiao ̄peng1ꎬWANFang ̄xin1∗(1.CollegeofMechanicalandElectricalEngineeringꎬGansuAgriculturalUniversityꎬGansuAgriculturalUniversityꎬLanzhouGansu730070ꎬChinaꎻ2.WeifangVocationalCollegeꎬWeifangShandong262737ꎬChina)Abstract:Dynamicsimulationanalysiswasconductedonthevibrationharvestingofoliveoiltodevelopamechanicalvibrationtypeoliveharvester.AccordingtothebasicparametersandtreestructureofolivetreeꎬtheSOLIDWORKSsoftwarewasusedtosimplifyandestablishthethree-dimensionalmodelofolivetreeꎬandthemodalanalysisandharmoniousresponseanalysisofolivetreewerecarriedoutbyANSYSWorkbench.Thefirst10ordernaturalfrequen ̄ciesofolivetreewereobtainedbymodalanalysisꎬandtheoptimalvibrationfrequencyrangewasdeterminedtobe18~21Hz.Theharmonicresponseanalysisshowsthattheoptimalexcitationforcesizeis2000Nꎬtheoptimalexci ̄tationheightis800mmꎬandtheoptimalexcitationfrequencyis20Hz.㊀Thisstudycanprovidetheoreticalbasisforthedesignofmechanicalvibratingoliveharvester.Keywords:oliveꎻmechanicalvibrationꎻmodalanalysisꎻharmonicresponseanalysis㊀㊀收稿日期:2023-03-02基金项目:甘肃省重点研发计划项目 丘陵山地果园多功能管理机的研制 (21YF5NA093)第一作者简介:梁明清ꎬ硕士研究生ꎬ主要从事特色林果生产机械化研究ꎬE-mail:1846869593@qq.comꎮ∗通讯作者:万芳新ꎬ教授ꎬ硕士生导师ꎬ硕士ꎬ主要从事特色林果生产机械化和农产品加工技术与装备研究ꎬE-mail:wanfx@gsau.edu.cnꎮ油橄榄(OleaeuropaeaL.)属于木犀科(Oleaceae)常绿乔木ꎬ被誉为和平树㊁长寿树ꎬ是世界著名的优质木本油料树种兼果用树种之一ꎬ其鲜果所榨的油含有丰富的营养和功能活性成分ꎬ具有预防心脑血管疾病林业机械与木工设备第51卷和抗肿瘤等功能ꎬ素有 植物油皇后 的美誉ꎮ近年来甘肃省陇南地区油橄榄种植面积快速增长ꎬ据不完全统计ꎬ目前陇南地区油橄榄种植面积达54万hm2ꎬ产量占全国总产量的60%以上[1-3]ꎮ随着油橄榄种植面积持续增长ꎬ人工采收已不能满足油橄榄产业的发展需求ꎬ因此亟待研发油橄榄采收机械解决采收问题ꎮ目前ꎬ国内外小型林果的机械化采收较多采用振动的方式[4]ꎮ果树振动收获最佳激振频率和振幅与果树自身固有频率有关ꎬ因此不同果树振动的仿真与分析研究可对激振方式选择和激振装置设计提供理论指导[5-6]ꎮ王冬等[7]建立了3种典型果树三维模型ꎬ利用有限元方法进行了模态分析ꎬ得到了固有频率和模态振型ꎬ并进行了振动响应特性仿真试验ꎮ丁凯等[8]对枣树建立三维模型并进行了模态分析和谐响应分析ꎬ确定了枣树的最佳激振频率ꎮ张最等[9]根据枸杞振动采收机理建立了振动采摘动力学模型ꎬ通过田间试验发现ꎬ试验结果与仿真结论一致ꎮL.Phillips等[10]针对果树主干和侧枝结构ꎬ利用有限元分析方法进行了动力学仿真分析ꎮH.Bentaher等[11]通过对油橄榄进行有限元数值模拟分析ꎬ优化了油橄榄果实机械收获中的激振条件ꎮ本文以油橄榄树为研究对象ꎬ首先建立树体三维模型ꎬ继而利用有限元仿真软件对模型进行模态分析和谐响应分析ꎬ得出油橄榄树的固有频率㊁最佳激振力㊁激振位置及激振频率ꎬ以期为振动式油橄榄收获机械激振参数的选择提供理论参考ꎮ1㊀油橄榄树有限元模型建立1.1㊀油橄榄树的农艺要求与生长参数对甘肃省陇南市武都区桔柑镇种植基地进行实地考察ꎬ以树龄为20年左右的油橄榄树作为调研对象ꎬ对油橄榄行距㊁油橄榄株距㊁油橄榄高度㊁树冠直径㊁树冠高度㊁树干直径等参数进行测量ꎮ测量工具为卷尺(分度值为1mm)和游标卡尺(分度值为0.02mm)ꎬ测得的各参数如表1所示ꎮ表1㊀油橄榄树的农艺和生长参数测量项目测量参数油橄榄树树距/m3.2ʃ0.2油橄榄树行距/m5.4ʃ0.2油橄榄树最高高度/m3.5ʃ0.2油橄榄树最大主干直径/mm100ʃ0.2油橄榄树最大树冠直径/m3.2ʃ0.21.2㊀油橄榄树的有限元模型根据油橄榄树实际生长特征及尺寸ꎬ利用三维建模软件SOLIDWORKS建立油橄榄树模型[12]ꎮ为便于油橄榄树的有限元分析ꎬ本文对油橄榄树枝干进行简化ꎬ主枝简化成表面光滑㊁具有一定直径和曲率的圆柱杆ꎮ将建立的模型导入关联软件ANSYSWorkbench中ꎬ按表2中油橄榄树的基本物理参数设定材料的属性ꎮ对油橄榄树进行网格划分ꎬ采用自动划分网格ꎬ网格模型由134008个节点和72229个单元体组成ꎮ建立的油橄榄树模型如图1所示ꎮ表2㊀材料属性密度/kg m-3弹性模量/Pa泊松比4006.658E+90.3图1㊀油橄榄树有限元模型2㊀模态分析为分析油橄榄树的固有频率和振型ꎬ进行油橄榄树的模态分析ꎮ将油橄榄树的根部固定在土壤中ꎬ模态分析时ꎬ对油橄榄树主干底部添加固定约束[13]ꎮ由于油橄榄树在高频振动下容易造成损伤ꎬ并且一般振动机构的振动频率难以超过30Hz[14]ꎬ因此在(0ꎬ30)Hz频率范围内进行模态分析ꎮ油橄榄树模态分析中的前10阶固有频率如表3所示ꎬ获得振型图如图2所示ꎮ64第7期梁明清ꎬ等:基于振动采收的油橄榄树动力学仿真分析表3㊀油橄榄树的前10阶固有频率模态阶数固有频率/Hz15.266726.053238.285049.5297511.502618.107719.267820.002920.7401025.70774林业机械与木工设备第51卷图2㊀油橄榄树模态图㊀㊀油橄榄树的10阶固有频率范围为5.2667~25.707Hzꎬ当施加力的振动频率越接近固有频率时ꎬ对应油橄榄树的响应幅值越大ꎮ分析振型图可知:第1阶㊁第2阶和第4阶模态都表现为主枝和部分侧枝振动ꎬ产生的响应幅值较小ꎻ第3阶㊁第5阶和第6阶表现为全部侧枝的振动ꎬ响应幅值相对较大ꎻ第7阶到第8阶表现为全部侧枝的振动ꎬ响应幅值适中ꎻ第9阶和第10阶表现为部分侧枝的振动ꎬ响应幅值略大ꎮ综上所述ꎬ油橄榄振动收获所施加激振力激振频率应接近油橄榄树第7㊁8阶固有频率ꎬ所以最佳激振力振动频率范围为18~21Hzꎮ3㊀谐响应分析为研究油橄榄树的振动规律ꎬ分析树干在稳态下受迫振动情况ꎬ通过模拟振动装置作用在树体上产生的激振力ꎬ迫使树体做简谐运动ꎮ采用模态叠加法ꎬ在模态分析基础上对树体模型进行谐响应分析ꎮ本研究所依托的油橄榄收获机ꎬ通过双偏心式振动方式ꎬ产生简谐激振力ꎬ在X轴方向产生激振力ꎬY方向的力相互抵消ꎮ3.1㊀油橄榄树表面激振力施加位置的确定为确定油橄榄树表面某一位置施加激振力时ꎬ油橄榄树整体振动变形和位移分布较均匀ꎬ激振力传递效果较好ꎬ需求得这一施力位置距地面高度[15]ꎮ选取激振力施加位置距离地面高度分别为600mm㊁800mm㊁1000mmꎬ将大小为2000N的激振作用力施加于油橄榄树枝表面ꎬ分析得到油橄榄树变形和位移云图如图3所示ꎮ由图3可知ꎬ同一大小激振作用力施加在油橄榄树表面不同位置ꎬ油橄榄树整体产生的变形和位移均不同ꎮ激振位置距离地面600mm时ꎬ油橄榄树主枝和侧枝均产生不同程度的振动ꎬ所产生的振动位移较小ꎻ距离地面高度800mm时ꎬ油橄榄树侧枝振动程度较为明显ꎬ振动位移量较大ꎻ距离地面高度1000mm时ꎬ油橄榄树主枝和侧枝振动传递效果明显ꎮ综合以上对比分析可知ꎬ油橄榄树激振力施加位置距离地面高度为800mm时ꎬ振动变形和位移分布较均匀㊁激振力传递效果较好ꎮ84第7期梁明清ꎬ等:基于振动采收的油橄榄树动力学仿真分析图3㊀激振力为2000N时不同激振位置油橄榄树模型变形和位移云图3.2㊀油橄榄树表面激振力大小的确定为确定油橄榄树表面某一位置施加激振力时ꎬ油橄榄树整体振动变形和位移分布较均匀ꎬ激振力传递效果较好ꎬ需求得激振力大小ꎮ选取激振力施加位置距离地面高度为800mmꎬ将大小分别为1000N㊁2000N㊁3000N的激振作用力施加于油橄榄树枝表面ꎬ分析得到油橄榄树变形和位移云图如图4所示ꎮ图4㊀距离地面800mm时不同激振力油橄榄树模型变形和位移云图㊀㊀由图4可知ꎬ不同大小激振作用力施加在油橄榄树枝表面距离地面高度为800mm时ꎬ油橄榄树整体产生的变形和位移均不同ꎮ激振力大小为1000N时ꎬ油橄榄树主枝和侧枝均产生不同程度的振动ꎬ所产生的振动位移较小ꎻ激振力大小为2000N时ꎬ油橄榄树主枝和侧枝振动程度较为明显ꎬ振动位移较大ꎻ激振力大小为3000N时ꎬ油橄榄树主枝和侧枝振动效果明显ꎬ变形量明显增大ꎬ但其值过大容易损伤果树ꎮ综合以上对比分析可知ꎬ油橄榄树激振力大小为2000N时ꎬ振动变形和位移分布较均匀㊁激振力传递效果较好ꎮ3.3㊀油橄榄树枝表面频率响应分析为确定油橄榄树枝表面最佳激振频率ꎬ在油橄榄树中选取具有典型代表性6个响应点ꎬ选取在800mm处施加2000N激振力ꎬ如图5所示ꎮ图5㊀响应点选取对油橄榄树枝干顶端6处进行了频率响应变形分析ꎬ可以得到频率与加速度ꎬ以及频率与振幅的关系ꎮ对比后取1处典型频率响应变形进行分析ꎬ经94林业机械与木工设备第51卷过处理分析得到如图6所示的频率响应分析图ꎮ图6 频率响应㊀㊀由图6可知ꎬ油橄榄树模型整体加速度在油橄榄树固有频率范围内变化较大ꎮ当频率为20Hz时ꎬ油橄榄树侧枝关键点加速度响应值达到最大ꎬ同时关键点位移响应值也处在峰值ꎮ为提高机械振动式油橄榄收获效率同时不损伤油橄榄树ꎬ对油橄榄树施加激振力的激振频率不能和油橄榄树固有频率值相同ꎬ应在油橄榄树固有频率值附近ꎮ根据模态分析所得油橄榄树固有频率ꎬ得油橄榄树机械振动收获所施加激振力的最佳激振频率为20Hzꎮ4㊀结论结合ANSYS有限元分析软件和SOLIDWORKS建模软件进行了油橄榄树振动采收的仿真分析ꎮ根据油橄榄种植基地的生长参数ꎬ建立油橄榄树的三维实体模型ꎬ通过模态分析获得油橄榄树前10阶固有频率和振动模式ꎬ油橄榄树的前10阶振动固有频率的范围从5.2667~25.707Hzꎬ并得到最佳激振力振动频率范围为18~21Hzꎮ采用模态叠加法ꎬ通过谐响应分析确定油橄榄树表面激振力最佳施加位置距离地面为800mmꎬ最佳激振力为2000Nꎬ通过频率分析ꎬ获得油橄榄树枝表面最佳激振频率为20Hzꎮ本文可为振动式油橄榄收获机激振参数的确定提供理论参考ꎮ参考文献:[1]㊀于小飞.中国油橄榄产业区域发展规划研究[J].陕西林业科技ꎬ2017(3):61-63.[2]㊀刘高顺ꎬ张正武ꎬ杨建宏.陇南市油橄榄产业发展成就与展望[J].中国林业ꎬ2016(9):220-221.[3]㊀王成章ꎬ陈强ꎬ罗建军ꎬ等.中国油橄榄发展历程与产业展望[J].生物质化学工程ꎬ2013ꎬ47(2):41-46.[4]㊀陈度ꎬ杜小强ꎬ王书茂ꎬ等.振动式果品收获技术机理分析及研究进展[J].农业工程学报ꎬ2011(8):195-200.[5]㊀彭俊ꎬ孙世鹏ꎬ傅隆生.机械振动式沙棘采收的动力学研究[J].农机化研究ꎬ2017ꎬ39(1):32-37.[6]㊀杜小强ꎬ倪柯楠ꎬ潘珂ꎬ等.可调振幅单向拽振式林果采收机构参数优化[J].农业工程学报ꎬ2014(16):25-32.[7]㊀王冬ꎬ陈度ꎬ王书茂ꎬ等.基于有限元方法的整形果树振动收获机理分析[J].农业工程学报ꎬ2017ꎬ33(1):56-62.[8]㊀丁凯ꎬ张炳成ꎬ张慧明ꎬ等.机械振动式红枣收获的动力学研究[J].农机化研究ꎬ2019ꎬ41(2):50-54.[9]㊀张最ꎬ肖宏儒ꎬ丁文芹ꎬ等.振动式枸杞采摘机理仿真分析与样机试验[J].农业工程学报ꎬ2015ꎬ31(10):20-28.[10]㊀LPhillips-AꎬHutchinsonJRꎬFridleyRBꎬetal.Formulationofforcedvibrationsoftreelimbswithsecondarybranches[J].Trans ̄actionsoftheASAEꎬ1970ꎬ13(1):138-142.[11]㊀BentaherHꎬHaddarMꎬFakhfakhTꎬetal.Finiteelementsmodelingofolivetreemechanicalharvestingusingdifferentshakers[J].Treesꎬ2013ꎬ27(6):1537-1545.[12]㊀刘梦飞.核桃采摘机的设计与试验[D]:西安:陕西科技大学ꎬ2015.[13]㊀何苗ꎬ坎杂ꎬ李成松ꎬ等.枸杞植株的动力学特性研究[J].农机化研究ꎬ2018ꎬ40(5):18-23.[14]㊀贺磊盈.面向振动采收的果树枝干三维重建方法及其动力学特性研究[D].杭州:浙江理工大学ꎬ2014.[15]㊀吴道远.核桃树体建模及其果实采摘机设计[D].福州:福建农林大学ꎬ2017.05。