行星齿轮产生自转的条件
- 格式:ppt
- 大小:830.00 KB
- 文档页数:46

机械原理行星齿轮传动
机械原理行星齿轮传动是一种常见的传动装置,它由中心齿轮、行星齿轮和太阳齿轮组成。
行星齿轮通过行星架连接在中心齿轮的外围,并与太阳齿轮啮合。
这种传动方式具有紧凑结构、高传动比和高承载能力等优点,广泛应用于机械设备中。
在行星齿轮传动中,中心齿轮作为传动的主动轴,太阳齿轮作为从动轴,而行星齿轮则通过行星轴与行星架相连,并围绕中心齿轮运动。
当中心齿轮转动时,太阳齿轮和行星齿轮也会随之旋转。
行星齿轮的传动原理是基于齿轮啮合的力学原理。
当中心齿轮转动时,它的齿轮将驱动行星齿轮旋转。
因为行星齿轮与太阳齿轮之间有啮合关系,所以行星齿轮旋转的同时,太阳齿轮也会被带动旋转。
行星齿轮传动的传动比取决于中心齿轮的齿数、太阳齿轮的齿数和行星齿轮的齿数。
一般来说,行星齿轮具有较多的齿数,因此可以获得较高的传动比。
这使得行星齿轮传动在机械设备中广泛应用,特别是在需要大传动比和紧凑结构的场合。
然而,由于行星齿轮传动的结构较为复杂,制造和安装也较为困难。
此外,由于行星齿轮在运动过程中存在相对运动,因此摩擦和磨损等问题也需要得到有效的解决。
为了确保行星齿轮传动的正常运行,需要定期对其进行润滑和维护。
总的来说,机械原理行星齿轮传动是一种效率高、传动比大的
传动装置。
它广泛应用于各种机械设备中,为其提供高效稳定的动力传输。
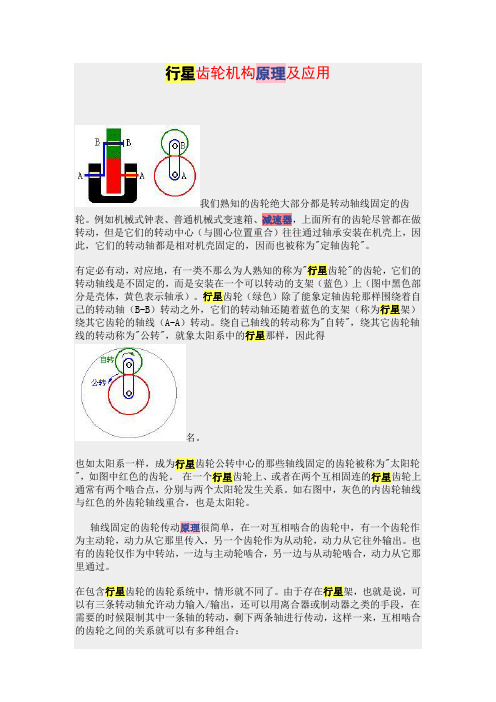
行星齿轮机构原理及应用我们熟知的齿轮绝大部分都是转动轴线固定的齿轮。
例如机械式钟表、普通机械式变速箱、减速器,上面所有的齿轮尽管都在做转动,但是它们的转动中心(与圆心位置重合)往往通过轴承安装在机壳上,因此,它们的转动轴都是相对机壳固定的,因而也被称为"定轴齿轮"。
有定必有动,对应地,有一类不那么为人熟知的称为"行星齿轮"的齿轮,它们的转动轴线是不固定的,而是安装在一个可以转动的支架(蓝色)上(图中黑色部分是壳体,黄色表示轴承)。
行星齿轮(绿色)除了能象定轴齿轮那样围绕着自己的转动轴(B-B)转动之外,它们的转动轴还随着蓝色的支架(称为行星架)绕其它齿轮的轴线(A-A)转动。
绕自己轴线的转动称为"自转",绕其它齿轮轴线的转动称为"公转",就象太阳系中的行星那样,因此得名。
也如太阳系一样,成为行星齿轮公转中心的那些轴线固定的齿轮被称为"太阳轮",如图中红色的齿轮。
在一个行星齿轮上、或者在两个互相固连的行星齿轮上通常有两个啮合点,分别与两个太阳轮发生关系。
如右图中,灰色的内齿轮轴线与红色的外齿轮轴线重合,也是太阳轮。
轴线固定的齿轮传动原理很简单,在一对互相啮合的齿轮中,有一个齿轮作为主动轮,动力从它那里传入,另一个齿轮作为从动轮,动力从它往外输出。
也有的齿轮仅作为中转站,一边与主动轮啮合,另一边与从动轮啮合,动力从它那里通过。
在包含行星齿轮的齿轮系统中,情形就不同了。
由于存在行星架,也就是说,可以有三条转动轴允许动力输入/输出,还可以用离合器或制动器之类的手段,在需要的时候限制其中一条轴的转动,剩下两条轴进行传动,这样一来,互相啮合的齿轮之间的关系就可以有多种组合:单排行星齿轮机构的结构组成为例(1)行星齿轮机构运动规律·设太阳轮、齿圈和行星架的转速分别为n1、n2和n3,齿数分别为Z1、Z2、Z3;齿圈与太阳轮的齿数比为α。

行星齿轮啮合条件引言行星齿轮机构是一种广泛应用于各种传动装置中的重要机构,它具有结构紧凑、传动比大、承载能力强等优点。
而行星齿轮啮合条件则是评价行星齿轮机构性能的关键指标之一。
本文将详细探讨行星齿轮啮合的条件,在不同工况下如何满足这些条件,以及行星齿轮的应用范围和发展趋势。
行星齿轮的结构和工作原理行星齿轮由太阳轮、行星轮和内齿圈组成。
太阳轮位于行星轮与内齿圈之间,行星轮由行星架支撑,并且可以绕着太阳轮旋转。
内齿圈是行星齿轮机构的外齿,减速器的输出在内齿圈上。
行星齿轮的工作原理是通过太阳轮和行星轮的啮合,实现输入轴转速与输出轴转速的转换。
行星齿轮啮合条件行星齿轮的啮合条件是指行星齿轮机构在工作过程中,太阳轮与行星轮、行星轮与内齿圈之间能够正常的啮合。
为了保证行星齿轮的正常工作,并提高其传动效能,有以下几个关键的啮合条件需要满足。
1. 啮合传动比准确行星齿轮机构的传动比是定义传动比的唯一决定因素,它是由太阳轮的齿数、行星轮的齿数和内齿圈的齿数决定的。
在设计行星齿轮机构时,需要根据实际需要确定传动比,并通过正确的选取太阳轮、行星轮和内齿圈的齿数来实现准确的传动比。
2. 必要条件为了保证行星齿轮的正常工作,行星架的齿数应当满足以下条件: - 太阳齿数加两倍的行星齿数(即复合行星齿轮机构) - 太阳齿数加两倍的行星齿数加内齿圈齿数(即双重行星齿轮机构) - 太阳齿数加两倍的行星齿数减内齿圈的齿数(即异型行星齿轮机构)只有满足这些条件,行星齿轮机构才能有效地转动,并达到所要求的传动比。
3. 行星轮和齿圈的啮合性能行星轮和内齿圈在工作过程中,需要保持良好的啮合性能。
行星轮和内齿圈的啮合效果取决于齿轮的结构和制造精度。
制造精度越高、齿轮面接触越均匀,行星齿轮的寿命和传动效率就越高。
4. 减小啮合干涉行星齿轮机构工作时,会存在齿轮之间的干涉现象,形成浪涌噪声和额外的能量损失。
为了减小干涉现象,可以通过增加行星齿轮的齿数、选取合适的齿型,或采取其他措施来改善啮合状态。

行星减速机构成及意义、特点行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.相对其他减速机,行星减速机具有高刚性,高精度(单级可做到1分以内),高传动效率(单级在97% -98%),高的扭矩/体积比,终身免维护等特点.因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量.减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000 Nm以上.工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度.行星减速机的几个概念:级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙.行星减速机是一种用途广泛的工业产品,其性能可与其它军品级减速机产品相媲美,却有着工业级产品的价格,被应用于广泛的工业场合。
该减速器体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低。
具有功率分流、多齿啮合独用的特性。
最大输入功率可达104kW。
适用于起重运输、工程机械、冶金、矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器和航空航天等工业部门行星系列新品种WGN定轴传动减速器、WN子母齿轮传动减速器、弹性均载少齿差减速器。

行星齿轮机构运动规律原理及应用分析类型:转载来源:济民工贸的博客作者:齐兵责任编辑:李笛发布时间:2009年06月11日我们熟知的齿轮绝大部分都是转动轴线固定的齿轮。
例如机械式钟表、普通机械式变速箱、减速器,上面所有的齿轮尽管都在做转动,但是它们的转动中心(与圆心位置重合)往往通过轴承安装在机壳上,因此,它们的转动轴都是相对机壳固定的,因而也被称为"定轴齿轮"。
有定必有动,对应地,有一类不那么为人熟知的称为"行星齿轮"的齿轮,它们的转动轴线是不固定的,而是安装在一个可以转动的支架(蓝色)上(图中黑色部分是壳体,黄色表示轴承)。
行星齿轮(绿色)除了能象定轴齿轮那样围绕着自己的转动轴(B-B)转动之外,它们的转动轴还随着蓝色的支架(称为行星架)绕其它齿轮的轴线(A-A)转动。
绕自己轴线的转动称为"自转",绕其它齿轮轴线的转动称为"公转",就象太阳系中的行星那样,因此得名。
也如太阳系一样,成为行星齿轮公转中心的那些轴线固定的齿轮被称为"太阳轮",如图中红色的齿轮。
在一个行星齿轮上、或者在两个互相固连的行星齿轮上通常有两个啮合点,分别与两个太阳轮发生关系。
如右图中,灰色的内齿轮轴线与红色的外齿轮轴线重合,也是太阳轮。
轴线固定的齿轮传动原理很简单,在一对互相啮合的齿轮中,有一个齿轮作为主动轮,动力从它那里传入,另一个齿轮作为从动轮,动力从它往外输出。
也有的齿轮仅作为中转站,一边与主动轮啮合,另一边与从动轮啮合,动力从它那里通过。
在包含行星齿轮的齿轮系统中,情形就不同了。
由于存在行星架,也就是说,可以有三条转动轴允许动力输入/输出,还可以用离合器或制动器之类的手段,在需要的时候限制其中一条轴的转动,剩下两条轴进行传动,这样一来,互相啮合的齿轮之间的关系就可以有多种组合:单排行星齿轮机构的结构组成为例● (1)行星齿轮机构运动规律设太阳轮、齿圈和行星架的转速分别为n1、n2和n3,齿数分别为Z1、Z2、Z3;齿圈与太阳轮的齿数比为α。

行星齿轮的自转与公转1.引言1.1 概述概述部分的内容可以根据文章整体的主题和目的进行编写。
在这篇长文中,文章主要讨论的是行星齿轮的自转与公转的现象及其相关原理和关系。
在引言的概述部分,我们可以先简要介绍行星齿轮和自转与公转的概念。
行星齿轮是一种机械传动装置,其结构类似于太阳系中的行星运动,因而得名。
自转是行星齿轮内部某一个齿轮的旋转运动,而公转则是行星齿轮整体围绕中心轴的旋转运动。
这两种运动的协同作用使得行星齿轮能够实现更加复杂的传动方式,具有广泛的应用领域。
接着,在概述部分中,可以提及本文的结构安排,即接下来将分别介绍自转的定义和原理,以及行星齿轮的自转现象。
自转的定义和原理部分将展开对自转概念的解释,并阐述自转运动的发生机制和影响因素。
行星齿轮的自转现象部分将具体讲述行星齿轮内部各个齿轮之间的自转关系,以及其在传动中的特殊功能和应用。
最后,可以简要提及本文的目的,即通过对行星齿轮的自转与公转现象的研究,进一步了解该机械传动装置的工作原理和特点。
深入理解这些概念和原理,有助于实际工程应用和改进设计,也能为机械传动领域的研究提供新的思路和方向。
综上所述,引言部分的概述内容应包括对行星齿轮、自转和公转的简要介绍,以及本文的结构安排和目的。
这些内容将为读者提供一个整体的了解,并引导他们进入文章的正文部分。
1.2文章结构1.2 文章结构本文将分为三个主要部分来探讨行星齿轮的自转与公转现象。
首先,在引言部分中将概述本文要讨论的内容和目的,为读者提供一个整体的了解。
其次,在正文部分中,将分为两个小节来详细介绍自转的定义和原理,以及行星齿轮的自转现象。
最后,在结论部分中,将探讨自转与公转的关系,并探讨行星齿轮自转和公转的应用前景与意义。
通过这样的结构,读者将能够逐步了解行星齿轮的自转与公转现象,从自转的定义和原理开始,了解行星齿轮的自转现象,最后再将这些知识应用到实际生活中,探讨其应用前景与意义。
这样的结构将帮助读者逐步深入了解行星齿轮的自转与公转,从而对这个领域有更深入的理解和认识。
行星齿轮机构运动规律原理及应用分析类型:转载来源:济民工贸的博客作者:齐兵责任编辑:李笛发布时间:2009年06月11日我们熟知的齿轮绝大部分都是转动轴线固定的齿轮。
例如机械式钟表、普通机械式变速箱、减速器,上面所有的齿轮尽管都在做转动,但是它们的转动中心(与圆心位置重合)往往通过轴承安装在机壳上,因此,它们的转动轴都是相对机壳固定的,因而也被称为"定轴齿轮"。
有定必有动,对应地,有一类不那么为人熟知的称为"行星齿轮"的齿轮, 它们的转动轴线是不固定的,而是安装在一个可以转动的支架(蓝色)上(图中黑色部分是壳体,黄色表示轴承)。
行星齿轮(绿色)除了能象定轴齿轮那样围绕着自己的转动轴(B-B)转动之外,它们的转动轴还随着蓝色的支架(称为行星架)绕其它齿轮的轴线(A-A)转动。
绕自己轴线的转动称为"自转",绕其它齿轮轴线的转动称为"公转",就象太阳系中的行星那样,因此得名。
也如太阳系一样,成为行星齿轮公转中心的那些轴线固定的齿轮被称为" 太阳轮",如图中红色的齿轮。
在一个行星齿轮上、或者在两个互相固连的行星齿轮上通常有两个啮合点,分别与两个太阳轮发生关系。
如右图中,灰色的内齿轮轴线与红色的外齿轮轴线重合,也是太阳轮。
轴线固定的齿轮传动原理很简单,在一对互相啮合的齿轮中,有一个齿轮作为主动轮,动力从它那里传入,另一个齿轮作为从动轮,动力从它往外输出。
也有的齿轮仅作为中转站,一边与主动轮啮合,另一边与从动轮啮合,动力从它那里通过。
在包含行星齿轮的齿轮系统中,情形就不同了。
由于存在行星架,也就是说,可以有三条转动轴允许动力输入/输出,还可以用离合器或制动器之类的手段,在需要的时候限制其中一条轴的转动,剩下两条轴进行传动,这样一来,互相啮合的齿轮之间的关系就可以有多种组合:单排行星齿轮机构的结构组成为例•(1)行星齿轮机构运动规律设太阳轮、齿圈和行星架的转速分别为n1、n2和n3,齿数分别为Z1、Z2、Z3;齿圈与太阳轮的齿数比为a。
行星齿轮原理的详细图文介绍含超详细的公式推导图1. 行星齿轮原理图。
一、系统的结构和转动如图1所示,系统中有三个齿轮:最内层的太阳轮(半径r)、最外层的齿圈(半径R)、连接内外层的行星轮(半径为自r自=(R−r)/2)。
太阳轮和齿圈只会自转,行星轮既自转又绕太阳轮公转,公转半径为中r中=(R+r)/2。
整个系统的结构完全由r和R这两个参数决定。
为方便记忆,我们根据齿轮的位置,把太阳轮称为内轮,齿圈称为外轮,行星轮称为中轮。
三个齿轮一共有4种转动,每种转动由一个参数来描述,共4个参数(参见图1):(1)内轮的自转,由角速度ω描述;(2)外轮的自转,由角速度Ω描述;(3)中轮围绕自身的质心自转,由角速度自ω自描述;(4)中轮的质心围绕太阳轮的质心公转,由角速度中ω中描述。
【备注】所有的角速度都以逆时针为正方向:正值代表逆时针转,负值代表顺时针转。
然而,上述4个参数并不完全独立,因为中轮跟内、外轮都有接触。
中轮质心的线速度为中中ω中r中,而中轮的自转导致接触点A相对中轮质心的线速度为自自−ω自r自,因此中轮在接触点A处的线速度为中中自自ω中r中−ω自r自,它必须等于内轮在接触点A处的线速度ωr(否则在接触点会打滑);类似的,在接触点B,中轮的线速度中中自自ω中r中+ω自r自必须等于外轮的线速度ΩR(否则在接触点会打滑)。
于是我们得到两个约束条件:中中自自,中中自自,ωr=ω中r中−ω自r自,ΩR=ω中r中+ω自r自,它导致整个系统的4种运动(中自ω,Ω,ω中,ω自)中,只有两种是独立的,我们可以任意选择两个参数做为独立参数。
比较方便的选择是以ω,Ω为独立参数,它俩一旦确定,则中自ω中,ω自也就确定了(亦即中轮的转动完全由内、外轮的转动决定):中中自自ω中=ΩR+ωr2r中=ΩR+ωrR+r,ω自=ΩR−ωr2r自=ΩR−ωrR−r,图2. 行星齿轮如图2所示,实际的行星齿轮系统,包含许多个中轮共同绕着内轮公转,同时每个中轮也会绕各身的质心自转。
差速器行星齿轮自转转速计算
差速器是汽车传动系统中一个非常重要的部件,它可以将发动机的动力传递到车轮上。
差速器中的行星齿轮组自转也是其运转原理之一。
本文将介绍如何计算差速器行星齿轮组的自转转速。
首先,我们需要了解差速器行星齿轮组的结构。
它由太阳轮、行星轮、行星架和内环组成。
太阳轮位于中心,内环与车轮相连,行星轮则固定在行星架上。
当差速器运转时,太阳轮会驱动行星轮和行星架一起自转,同时行星架上的行星轮也会绕太阳轮旋转。
根据行星齿轮组的运动原理,我们可以得出以下公式:
V = (N1 - N2) / (N1 + N2) * V1
其中,V为车轮速度,N1、N2分别为太阳轮和内环的齿轮数,V1为发动机转速。
根据这个公式,我们可以求出差速器行星齿轮组的自转转速。
假设太阳轮和内环的齿轮数分别为20和25,发动机转速为
3000rpm,车轮速度为60km/h,则差速器行星齿轮组的自转转速为:
V = (20 - 25) / (20 + 25) * 3000rpm = -428.57rpm 这个负值表示行星齿轮组的自转方向与发动机的旋转方向相反。
需要注意的是,上述计算公式只适用于理论计算,实际差速器行星齿轮组的自转转速还会受到多种因素的影响,例如齿轮的磨损、摩擦等。
因此,在实际应用中需要结合实际情况进行调整。