空三加密在数字摄影测量中的精度分析
- 格式:pdf
- 大小:343.09 KB
- 文档页数:5
![[数字摄影,精度,空三]数字摄影测量空三加密的精度控制及应用研究](https://uimg.taocdn.com/15ccdc11bb4cf7ec4bfed0d0.webp)
数字摄影测量空三加密的精度控制及应用研究摘要:空三加密是数字摄影测量过程中的一道重要工序。
空三加密的精度高低和速度快慢直接影响整个作业的精度和进程,因此在整个过程中要注意每一个环节,保证精度。
为了保证作业过程中的精度,就需要制定出一套切实可行的作业方法。
针对自动空中三角测量作业流程中存在的一些问题,笔者结合适普软件公司研发的自动空三加密软件Virtuozo-AAT及具体数据进行实际的操作练习,探索出一套切实可行、可靠、快捷的空三加密方法以及作业中的精度保障措施,进一步提高内业加密速度、加密精度。
关键词:数字摄影测量;空三加密;精度分析;AATM/PATB系统1 自动空三加密模块介绍VirtuoZo全数字摄影测量系统的影像配准算法具有可靠、快速和精确的优点。
其中的自动空三量测(AAT)模块除半自动量测控制点之外,其他所有作业包括内定向、选取加密点、加密点转点、相对定向、模型连接和生成整个测区像点网都可以自动完成。
主要功能:1)自动内定向:自动识别影像框标以及计算内定向参数。
2)自动生成稳定的、可靠的测区像点网。
3)完全支持PATB的各项平差功能,如相机自检校法补偿系统误差和GPS参数联合平差等,可以实现高精度的区域网平差。
2 空三加密的原理空中三角测量主要是利用VirtuoZo全数字摄影测量系统来实现,VirtuoZo的影像配准算法具有可靠,快速和精确的优点。
其中的自动空三测量模块除半自动测量控制点之外。
其他所有作业(包括内定向,选取加密点,加密点转点,相对定向,模型连接和生成整个测区像点网)都可以自动完成。
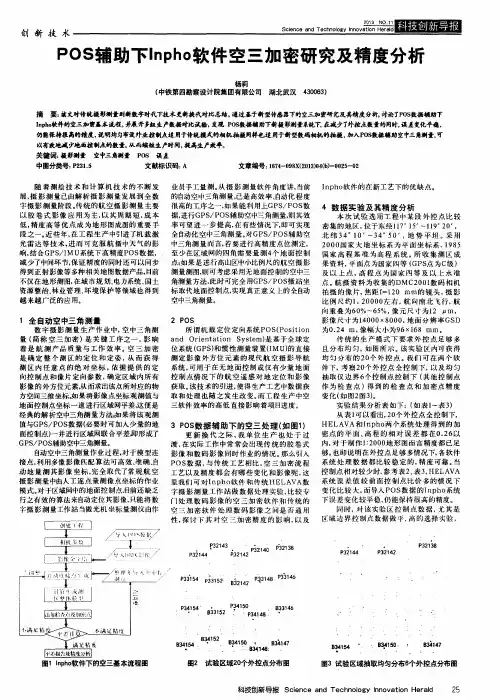
3 空三加密的作业流程空中三角测量是摄影测量生产中的关键步骤。
它是将建立的投影光束,单元模型和航带模型以至区域模型的数学模型,根据少量地面控制点,按最小二乘法原理进行平差,解求出各加密点的地面坐标。
3.1 数据准备主要完成影像格式转换,创建测区,创建影像列表和内定向三部分工作,为构网平差提供基础。
数字摄影测量空三加密处理技术及精度评价研究关键词:摄影测量空中三角测量POS 误差1 引言随着测绘技术和计算机技术的不断发展,摄影测量已由解析摄影测量发展到全数字摄影测量阶段。
传统的航空摄影测量主要以胶卷式影像应用为主,以其周期短,成本低,精度高等优点成为地形图成图的重要手段之一。
近些年,在工程生产中引进了机载激光雷达等技术,进而可克服航摄中天气的影响,结合GPS/IMU系统下高精度POS数据,减少了中间环节,保证精度的同时还可以同步得到正射影像等多种相关地图数据产品,目前不仅在地形测图,在城市规划、电力系统、国土资源整治、林业管理、环境保护等领域也得到越来越广泛的应用。
2 全自动空中三角测量数字摄影测量生产作业中,空中三角测量(简称空三加密)是关键工序之一,影响着是航测产品质量与工作效率。
空三加密是确定整个测区的定位和定姿,从而获得测区内任意点的绝对坐标,依据提供的定向控制点和像片定向参数,确定区域内所有影像的外方位元素,从而求出该点所对应的物方空间三维坐标。
如果将影像点坐标观测值与地面控制点坐标一道进行区域网平差,这便是经典的解析空中三角测量方法;如果将该观测值与GPS/POS数据(必要时可加入少量的地面控制点)一并进行区域网联合平差,即形成了GPS/POS辅助空中三角测量。
自动空中三角测量作业过程,对于模型连接点,利用多像影像匹配算法可高效、准确、自动地量测其影像坐标,完全取代了常规航空摄影测量中由人工逐点量测像点坐标的作业模式。
对于区域网中的地面控制点,目前还缺乏行之有效的算法来自动定位其影像,只能将数字摄影测量工作站当做光机坐标量测仪由作业员手工量测。
从摄影测量软件角度讲,当前的自动空中三角测量,已是高效率、自动化程度很高的工序之一,如果能利用上GPS/POS数据,进行GPS/POS辅助空中三角测量,则其效率可望进一步提高,在有些情况下,即可实现全自动化空中三角测量。
对GPS/POS辅助空中三角测量而言,若要进行高精度点位测定,至少在区域网的四角需要量测4个地面控制点;如果是进行高山区中小比例尺的航空摄影测量测图,则可考虑采用无地面控制的空中三角测量方法,此时可完全用GPS/POS摄站坐标取代地面控制点,实现真正意义上的全自动空中三角测量。
制点布设在中央区域以及测量区域的四角出,共计约5个,通过这种方式保证能够在进行多余观测,并及时发现粗差等基础上,还可以出色完成比例是1:2000地形图的绘制工作[2]。
2.3 布设像控点一般情况下,区域网法是当前像控点最为常见的一种布设方案,在这一方法中航向的间隔为4条基线。
这一项目的像控点借助GPS-RTK进行施测,同时根据平高点具体的要求来布设像控点。
通常布设的范围处于航向重叠3片区域中,而当于区域网内布点时则需要确保5至6片的重叠;另外,像控点和相片边缘之间的距离应当处于1.5cm及以上。
3 对空三加密精度的分析就当前航空摄影测量基本的流程来看,在航测工作中空三加密技术有着极为重要的作用,它直接决定着最终地籍图的精度。
在目前科学技术快速发展的过程中,航测工作的时间愈发紧张,对应的任务量也在随之增加,而借助空三加密相关的软件,则能够迅速且高效的完成各项加密工作。
在布设传统外业像控点时,控制点的点位位置往往需要进行谨慎考虑,通常对其有着极为严格的要求。
因此,是否能够有效脱离目前外业像控布点工作中的种种限制,从而有效减少控制点实际的布设量,进而在不影响测量区域加密精度的前提下有效提升航线跨度,逐渐成为当前管理人员急需去考虑的一个问题。
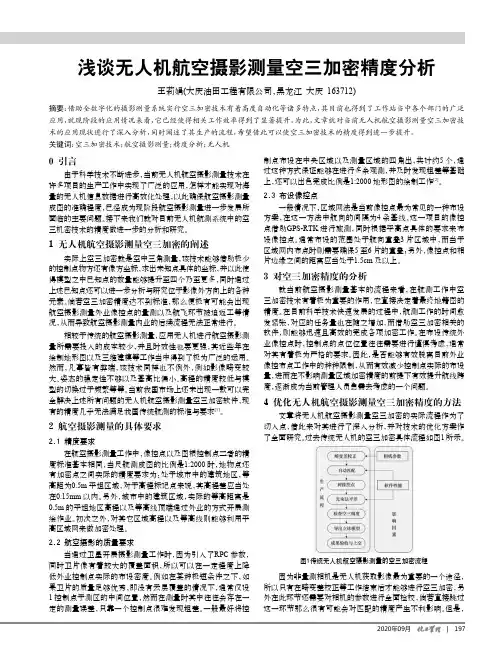
4 优化无人机航空摄影测量空三加密精度的方法文章将无人机航空摄影测量空三加密的实际流程作为了切入点,借此来对其进行了深入分析,并对技术的优化方案作了全面研究。
过去传统无人机的空三加密具体流程如图1所示。
图1传统无人机航空摄影测量的空三加密流程因为非量测相机是无人机获取影像最为重要的一个途径,所以只有在畸变差校正等工作结束后才能够进行空三加密,另外在此环节还需要对相机的参数进行全面检校,倘若直接跳过这一环节那么很有可能会对匹配的精度产生不利影响。
但是,0 引言由于科学技术不断进步,当前无人机航空摄影测量技术在许多项目的生产工作中实现了广泛的应用,怎样才能实现对海量的无人机信息数据进行高效化处理,以此确保航空摄影测量成图的准确程度,已经成为现阶段航空摄影测量进一步发展所面临的主要问题。
空三加密更新测量在大比例尺数字化成图中的应用【摘要】近几年来,随着我国航空摄影测量的飞速发展,国家相关部门对测量行业的生产力和生产技术也提出了较高的要求。
由于目前我国航空摄影测量发展已经逐步趋于数字摄影测量阶段,因此,对测量精度的提高和对测量技术的更新是不容忽视的。
本文主要在介绍空三加密更新测量的实际用途与意义的基础上,对空三加密更新测量在大比例尺数字化成图中的应用进行探讨,以此来为今后航空摄影测量的发展提供一定的参考依据。
【关键词】空三加密大比例尺数字化成图所谓空三加密更新测量,主要指的是在原有成图资料的基础上,加入适当的新像控点,通过现有的软件系统进行空三加密更新量测、平差、解算作业的过程。
目前,随着空三加密更新测量技术的广泛应用,如何在不降低成图精度的基础上,完成对地形图的更新也成为了企业测量人员所面临的一项重大课题。
为此,本文就此展开了相关的实验与探讨,以此来进一步提高空三加密更新测量在大比例尺数字化成图中所发挥的作用。
1 空三加密更新测量的实际用途与意义从上文对空三加密更新测量概念的介绍我们能够知道,在利用空三加密进行更新测量的时候,所测量的测区必须是几年前已经成过图的地区。
只有这样,才能够将空三加密更新测量的作用充分发挥出来。
因此,本次试验所采取的是三年前已经成过图的地区,由于成图时间较短,所以在原有地形图中,仍然存在一些可利用的资料,即有三年前成图的外业基础控制及像控成果资料。
本测区数字线划1:1000成图大部分是更新修测,主要针对的是地形、地貌和地物等几个方面所产生的变化,对于此方面的更新修测,工作人员可以将原有的地形图资料充分利用起来进行空三加密更新测量作业。
与此同时,还可以相应的将外业的新像控点作业减少。
只有少部分是新增测图,需要测量人员重新对地区进行测量。
采取这样的测量方式,不仅能够减少测量的成本,而且还能够减少测量的时间,大大提高了工作效率。
就传统的空三加密更新测量应用的实际现状来看,较多的都是应用在小比例尺1:10000数字线划成图和正射影像1:5000,1:10000成图中,然而在大比例尺1:1000成图中却很好应用。
航测无人机空中三角测量及加密(空三)解析空中三角测量指的是用摄影测量解析法确定区域内所有影像的外方位元素。
在传统摄影测量中,这是通过对点位进行测定来实现的,即根据影像上量测的像点坐标及少量控制点的大地坐标,求出未知点的大地坐标,使得已知点增加到每个模型中不少于4个,然后利用这些已知点求解影像的外方位元素,因而解析空中三角测量也称摄影测量加密或者空三加密。
1、光束法空中三角测量光束法区域网空中三角测量是以一张像片组成的一束光线作为平差的基本单元,是以中心投影的共线方程作为平差的基础方程,通过各光线束在空间的旋转和平移,使模型之间的公共点的光线实现最佳交会,并使整个区域最佳地纳入到已知的控制点坐标系统中去,以相邻像片公共交会点坐标相等、控制点的内业坐标与已知的外业坐标相等为条件,列出控制点和加密点的误差方程式,进行全区域的统一平差计算,求解出每张像片的外方位元素和加密点的地面坐标,见图1:图1 光束法区域网平差对于目前全自动处理的空三软件,一般是利用影像自动匹配出航向和旁向的像点,将全区域中各航带网纳入到比例尺统一的坐标系统中,拼成一个松散的区域网,确认每张像片的外方位元素和地面点坐标的概略位置,然后根据外业控制点,逐点建立误差方程式和改化法方程式,求解出每张像片的外方位元素和加密点的地面坐标。
在获得每张像片的外方位元素和加密点地面坐标的近似值后,就可以用共线条件方程式,列出每张像片上控制点和加密点的误差方程式。
对每个像点可列出下列两条关系式,即:图2式中:图3对于外业控制点,如果不考虑它的误差,则控制点的坐标改正数dX=dY=dZ=0。
当像点坐标为等权观测时,误差方程式对应的法方程式为:图3公式图3含有像片外方位元素改正数X和待定点地面坐标改正数t两类未知数。
对于一个区域来说,通常会有几条、十几条甚至几十条航带,像片数将有几十、几百甚至几千张。
每张像片有6个未知数,一个待定点有3个未知数。
如若全区有N条航带,每个航带有n张像片,全区有m个待定点,则该区域的末知数为6n X N+3m个。
浅谈空三加密过程中常遇到的问题及处理方法摘要:本文叙述利用自动空三软件virtuozo aat进行空三加密的技术路线和作业过程中常遇到的问题及处理。
关键词:空中三角测量自动空三软件virtuozo aat中图分类号: p221+.1 文献标识码: a 文章编号:引言区域网空中三角测量指利用一个区域中多幅影像连接点的影像坐标和很少的已知影像坐标及其物方空间坐标的地面控制点,通过平差计算,求解连接点的物方空间坐标与影像的外方位元素。
在传统作业方式下,空三是一项非常乏味和耗时的工作,它主要包括:选择、转测加密点,量测加密点和控制点的像片坐标,进行区域网平差,检测并剔除粗差等作业。
virtuozo全数字摄影测量系统的影像配准算法具有可靠、快速和精确的优点。
其中的自动空三量测(aatm)模块除半自动量测控制点之外,其他所有作业(包括内定向、选取加密点、加密点转点、相对定向、模型连接和生成整个测区像点网)都可以自动完成。
patb 光束法区域网平差程序具有高性能的粗差检测功能和高精度的平差计算功能。
virtuozo aat就是将virtuozo aatm和patb集成后的自动空三软件。
空三加密技术路线和作业过程中常遇到的问题及处理方法空中三角测量是摄影测量生产中的关键步骤,它利用少量的地面控制点来计算一个测区中所有影像的外方位元素和所有加密点的地面坐标。
1、空三加密技术路线下面简述一下空三加密的技术路线(采用全数字摄影测量系统中的空三测量软件virtuozo aat进行像点量测,使用光束法区域网平差程序进行解算。
)主要由创建测区、内定向、确定航线偏移、自动转点、连接点编辑和测区接边主要部分构成。
2、作业过程中常遇到的问题及处理方法2.1内定向是数字摄影测量的第一步,目的就是确定扫描坐标和像片坐标系之间的关系以及数字影像可能存在的变形。
有时候在作内定向时,当作业员精确量准每一个框标时,内定向的中误差仍然非常大,造成这种现象的原因有:①摄影过程中产生的系统误差:如物镜畸变差、软片压平误差、滤光片或窗口保护玻璃不平引起的光学误差。
浅谈无人机航空摄影测量空三加密精度分析作者:李文昌来源:《名城绘》2020年第10期摘要:随着社会的发展,我国的测绘工程建设的发展也有了改善。
借助全数字化的摄影测量系统实行空三加密技术有着高度自动化等诸多特点,其目前也得到了工作站当中各个部门的广泛应用,就现阶段的应用情况来看,它已经使得相关工作效率得到了显著提升。
为此,文章就对当前无人机航空摄影测量空三加密技术的应用现状进行了深入分析,同时阐述了其生产的流程,希望借此可以使空三加密技术的精度得到进一步提升。
关键词:无人机航空摄影测量;空三加密;精度分析1 无人机航空摄影测量空三加密的阐述实际上空三加密就是空中三角测量,该技术能够借助极少的控制点物方还有像方坐标,求出未知点具体的坐标,并以此使得模型之中已知点的数量能够提升至四个乃至更多,同时通过上述已知点还可以进一步分析与研究位于影像外方向上的各种元素。
倘若空三加密精度达不到标准,那么便极有可能会出现航空摄影测量外业像控点的量测以及航飞环节被迫返工等情况,从而导致航空摄影测量内业的后续流程无法正常进行。
相较于传统的航空摄影测量,应用无人机进行航空摄影测量所需要投入的成本较少,并且时效性也要更强,其近些年在绘制地形图以及三维建模等工作当中得到了极为广泛的运用。
然而,凡事皆有弊端,该技术同样也不例外,例如影像畸变较大、姿态的稳定性不够以及基高比偏小、高程的精度较低与模型的切换过于频繁等等。
当前我国市场上还未出现一款可以完全解决上述所有问题的无人机航空摄影测量空三加密软件,现有的精度几乎无法满足我国传统航测的标准与要求。
2 数据与研究方法2.1 数据获取首先,选取了图书馆侧面的拐点,道路交叉点等20个控制点,然后使用DronesMap软件进行航线设计,通过全景图查看收藏位置并获取实景图,预览最佳航拍点。
飞行前设定相关参数,保证有效的航向和旁向重叠,旁向重叠度设置为15%—60%,最小不小于8%,航向重叠度设置为60%—80%,最小不应小于53%。
2018年 5月上 世界有色金属275航空摄影测量中空三加密问题分析刘萍萍(济南天润土地整理规划咨询有限公司,山东 济南 250000)摘 要:通过分析能够看出,航空摄影测量能够及时地得到有关的数据,空三加密对于航空摄影测量作业来说是比较重要的,直接影响到了整体的质量以及工作效率,所以需要高度重视所存在的不足之处,这样可以准确地得到有关的点,而且得到各个相关的元素。
关键词:航空摄影测量;空三加密;工作流程中图分类号:P231.4 文献标识码:A 文章编号:1002-5065(2018)09-0275-2Analysis of hollow three encryption in aero PhotogrammetryLIU Ping-ping(Ji'nan Tianrun land consolidation planning Consulting Co., Ltd., Jinan 250000,China)Abstract: Through analysis, it can be seen that aerial photogrammetry can get relevant data in time. Air three encryption is more important for aerial photogrammetry, which directly affects the quality and efficiency of the whole. Therefore, it is necessary to attach great importance to the inadequacies of the aerial photogrammetry, so that it can be accurately obtained. The point is closed, and all the related elements are obtained.Keywords: aerial photogrammetry; space three encryption; workflow收稿时间:2018-04作者简介:刘萍萍,女,生于1986年,汉族,山东济南人,本科,工程师,研究方向:测绘科学。
在1:500数字化成图中无人机小数码航空摄影测量空三加密技术的应用本文根据无人机小数码航空摄影测量空三加密技术,简单描述无人机系统的组成,以及正射影像图以及空中三角测量的制作。
通过DatMatrix2.0 系统对无人机小数码航空影像作1︰500 空三加密的研究,并分析加密成果的误差,证明无人机小数码航空摄影测量完全符合1︰500 数字化成图的标准,希望无人机的应用得到全面推广。
标签:无人机数码影像空三加密1前言通常无人机小数码航空遥感都把得到高分辨率遥感影像数据当作目标,它集成了航空遥感、GPS 导航定位以及无人驾驶飞行器等很多先进技术,属于一种专用化、低成本、小型化、高机动性的遥感系统。
无人驾驶的航空飞行器于1917年开始出现,刚开始通常用来当成靶机用,它的使用范围也只是在军事应用上,后来在侦察与军事作战上应用较多,接着开始成为民用遥感飞行的平台。
20 世纪80 年代以来,通讯技术和计算机发展迅速,因此各种数字化、探测精度高、重量轻、体积小的新型传感器纷纷出现,无人驾驶飞行系统的很多性能也得到很大提高,在应用领域上无人机遥感技术也迅速得到拓展。
因此无人机遥感的使用范围开始从最初的预警、侦察等军事领域逐渐扩大到应急测绘、气象观测、资源勘测等一些非军事领域,其应用前景也十分广阔。
大力推动遥感影像及无人机遥感系统的应用,这对于国民经济的发展以及遥感技术系统的完善有十分重要的意义。
2无人机影像快速空三加密技术通过无人机与专业数码相机的配合,本次无人机试飞两条航带,总共拍摄下34 张照片,拍摄到的面积达0.9 km2,两个航带之间的距离为220米,地面分辨率达到0.045米,其曝光间距为98米,无人机航向重叠是65%,旁向重叠是38%,且使用全野外布点进行拍摄。
2.1无人机低空航摄系统组成作为一种高端产品,无人机遥感系统集成了GPS 导航定位、遥感技术和无人驾驶飞行器等技术。
此遥感系统拥有专用化、实时观测、便捷式、低成本、高机动性等很多优点,且通过其获得的遥感影像的时间分辨率和空间分辨率都很高,在航空遥感技术发展中逐渐成为一支新生的力量,有效补充了卫星遥感的缺点。