基于数传电台的靶用型无人机测控系统
- 格式:pdf
- 大小:1.62 MB
- 文档页数:4

摘 要无人机在军事和民用领域都有广泛的应用。
新型武器试验等应用场合对无人机的性能提出了更高的要求。
随着微处理器、flash存储器、数传电台等器件和技术的发展,研制新一代数字化无人机的条件已经成熟。
本文基于某型号无人机的科研项目,对无人机测控系统和飞行控制系统中的数据传输进行了研究和探讨,针对客户的实际需求,结合单片机、数传电台等器件,设计了全数字化的无人机数据传输系统。
并对无人机测控地面站、无线通信、飞行控制系统中数据传输的各环节,在硬件电路、软件程序、可靠性措施等方面进行了大量试验和定型,最终完成了全数字化的无人机数据传输系统。
该系统可完成遥控指令、参数信息的上传,遥测信息的实时显示、飞行记录的存储和回放,满足了无人机的测控需求。
该系统与传统无人机测控系统相比,降低了设备复杂度、减少了整机重量;采用无线调参方式,除大大减少了飞行准备工作量之外,提高了单次飞行效率,减少了新机型试飞次数。
收发一体的无线通信方式,使无人机测控距离提高了50%。
与传统无人机飞行控制系统相比,飞行稳定性大为增强,在飞行定高、定向、故障处理等指标上有了较大提高。
关键词:无人机测控系统飞行控制系统数据传输AbstractThe UA V(unmanned aviation vehicle) has been widely used on civil field and military purpose. With the experiment of new weaponry or other needs, the capability of UA V has been required more and more highly. Along with the development of microprocessor, flash memorizer and digital transmitter-receiver or other apparatuses, it is feasible to manufacture UA V of new series.This based on a certain scientific research item, carrying through the research and discuss of data transmission in measure and command system and flight control system, design a complete digital transfer system on UA V which based on the practical requirements of clients and combined with the microprocessor , digital radio and other components. To accomplish this system, we carry through a mass of experiments and former improvements on hardware circuit, software program, reliability which is involved in ground equipment to measure and command UA V, wireless communications, flight control system and all other parts of data transmission. With the achievements of telecontrol instructions, parameter up load, telecontrol information real-time display, storage and release of flight enregister, this system can fulfil the requirements to UA V on measure and command.Compared with traditional UA V measure and command system, the system reduced equipment complication and plane weight. With application of wireless adjust parameter in the system, we can not only reduce the work on flight preparation, but also improve flight efficiency and reduce trial times. Due to transmit and receiver signals on one radio, the system increase UA V measure and command distance one and a half times. Compared with traditional UA V measure and command system, it improved the capability of flight stability, altitude and direction confirmation and fault management.Key words: UA V(unmanned aviation vehicle) , measure and command system, flight control system, data transmission.目录第一章 绪 论 (1)1.1国内外相关技术的发展现状 (1)1.1.1国外无人机发展的状况 (2)1.1.2我国无人机发展的情况 (3)1.2研究背景 (4)1.2.1无人机的测控系统现状及存在的问题 (4)1.2.2新型无人机测控系统性能指标 (4)1.3 本文所做的工作 (5)第二章 无人机测控系统的理论基础与地面站数据传输系统的设计 (7)2.1无人机测控系统概述 (7)2.1.1无人机飞行控制器 (7)2.1.2无人机测控系统技术 (9)2.2系统功能及组成框图 (11)2.3地面站主要数据传输通道 (12)2.3.1手操纵到主站 (12)2.3.2 主操纵到主站 (16)2.3.3测控计算机到主站 (17)2.3.4主站到电台 (18)2.3.5地面电台到测控计算机 (20)2.4系统工作时序及协议 (21)2.5系统调试及结果 (29)2.6 本章小结 (30)第三章 无线数据传输系统的设计与实现 (31)3.1双无线通道与单无线通道的比较 (31)3.2无线遥控(上行)通道 (34)3.3无线遥测(下行)通道 (34)3.4时分工作方式时序 (35)3.5无线通道的调试与结果 (36)3.6本章小结 (37)第四章 飞行控制系统的设计与实现 (38)4.1 飞控系统组成及数据传输通道 (38)4.2 数据传输通道接口及时序 (40)4.2.1 GPS接收器 (40)4.2.2 高度和航向传感器 (44)4.2.3 陀螺 (51)4.2.4 输出舵机 (51)4.2.5 MCU之间 (51)4.3 系统调试及结果 (53)4.4 本章小结 (54)第五章 系统可靠性分析及测试结果 (55)第六章 结束语 (59)致谢 (61)参考文献 (62)附录一 攻读硕士学位期间论文发表、项目研究情况 (64)第一章 绪 论军用无人机自1917年美国人首先研制成功以来,先后经历了无人靶机、指令遥控无人侦察机、预编程控制无人侦察机和复合控制多用途无人机的发展过程,并形成了庞大的军用无人机家族,在战争中扮演着长空尖兵的角色。
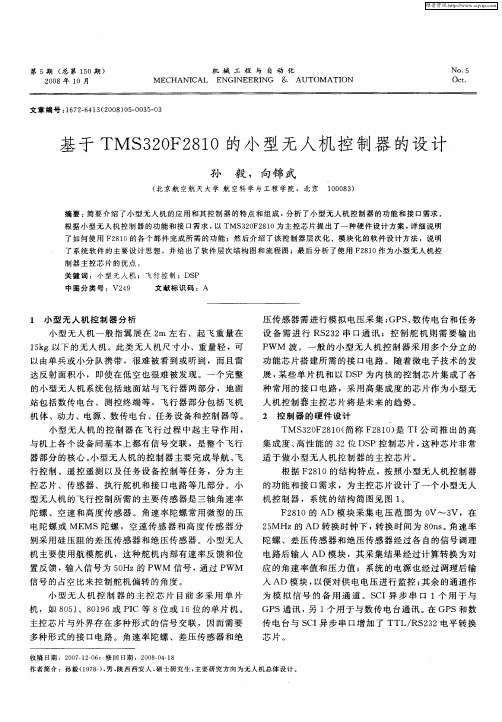

图11制导律示意由于横向加速度指令和跟踪这条瞬时圆弧的向心加速度这样可以得到1的长度为:。
因此可以得到横向加速度指令:。
所示的是该制导律在一个小的时间步长内的情况。
参考点位于飞行器速度方向的右边。
因此,在下一个时间步长中速度方向将会在加速度指令的作用下顺时针旋转。
由此可以得知,这个追踪算法能产生合适的横向加速度来跟踪任何的圆。
图3展示了若干步长下拦截算法产生轨迹的变仿真中=10m/s,1=40m),飞行器的起始位置离目标路但最终收敛到这个路径。
图2离散表示法:单个步长图3L1离散表示法表示若干个步长图5直线轨迹追踪示意在圆形轨迹追踪仿真中,拦截机的初始位置为(0,0行速度为12m/s,靶机的初始位置为(0,100),飞行半径为,飞行线速度为7.5m/s。
在直线轨迹的追踪仿真中,机的初始位置为(0,0),飞行速度设定为12m/s,靶机的初始位100,0),飞行速度为5m/s。
根据图4和图5的仿真结果拦截机均可以在一段时间内较好地追踪靶机,追踪时间由二者的速度差以及设定的1距离决定。
机载飞行控制器硬件部分飞行控制器是控制无人机完成起飞、空中飞行以及执行任务等整个飞行过程的核心系统。
在飞行器飞行过程中,飞行控制器通过各传感器实时获取飞行器的高度、速度、姿态、任务要求等信息按期望解算出飞行器的期望角度与各电机转速,图6飞行控制器实物图4圆形轨迹追踪示意图7飞行控制器工作流程3可视化地面站软件开发3.2地面站将目标机位置信息发送至拦截机的功能实现地面站软件通过3.1节所示步骤,读取到由靶机机载GPS 得到的目标机三维位置信息(纬度、经度、高度),并通过地面站界面显示出来。
在接收到靶机的三维位置信息后,地面站软件通过所设计的相应的数据发送端口,将靶机的三维位置信息通过所选端口发送至拦截机。
地面站与拦截机的通信协议(协议长度共30Byte,采用array数组表示)详细情况如表2所示。
表2地面站与拦截机机载GPS的通信协议综上,本文所设计的系统的工作流程可以总结为:首先,统通过GPS获取到靶机的位置信息;然后,由地面站作为中转,通过数传电台,实时地将靶机位置信息转发至拦截机;后,拦截机则根据自身位置信息,基于L1导航算法,拦截机在机载飞行控制器的引导下实现对靶机的伴飞与拦截。

浅谈数传电台在四旋翼无人机中的应用黄耀辉【摘要】本研究就数传电台在四旋翼无人机中的应用进行简单阐述.【期刊名称】《黑龙江科技信息》【年(卷),期】2016(000)027【总页数】1页(P16)【关键词】数传电台;四旋翼无人机;应用【作者】黄耀辉【作者单位】佛山市安尔康姆航空科技有限公司,广东佛山 528305【正文语种】中文数传电台又叫“无线数传模块”,是借助DSP技术与软件无线技术来进行专业的数据传输电台。
数传电台已经发展至全部采用数字处理技术,使得数字电台控制精度更高,功耗大大降低。
四旋翼无人机具有4个输入,即每个旋翼的转速,作为在空中的飞行体,其具有6个自由度。
所以对四旋翼无人机的控制和数据传输要求更高,复杂的输入与输出使得系统的控制难度变大。
所以将数传电台应用于这种系统中可以使得问题快速得到解决。
四旋翼无人机结构虽然简单,但是控制起来难度较大。
该无人机具有垂直起降的功能,在较小的空间中就可以进行飞行,可以适应各种环境,在实际生产生活中越来越重要。
1.1 数传电台的原理数传的基本原理是调制调解器通过无线方式工作,调制调解器没有拨号功能,但是其和无线电台直接相连接,无线电台的作用相当于中间媒介,使得无线电波可以顺利发送和接收。
无线调制调解器可以使二进制信号信号调制成无线电波在电台之间传输。
调制调解器所接收的源信号以及目的信号决定信号转化过程的属性。
二进制信号以串行方式传至调制调解器,之后转化为音频信号,调制调解器将这些声音加载至无线电台上传输,接收端装有兼容调制调解器,将接收的信号转化成二进制信号,然后传送给计算机。
在四旋翼无人机的应用中,数传电台将信号传给控制终端,同时通过终端操作,将信号传至无人机,实现可靠操控[1]。
通过数传电台,可以实现数据高效实时传输,使四旋翼无人机具有更多使用与开发意义。
1.2 数传电台特点数传电台相比之下,安装十分简单方便,数传电台频点的费用也较便宜,在通信距离方面,数传电台通信距离较远,能传至几十公里之外,所以在遥控方面具有较好前景。
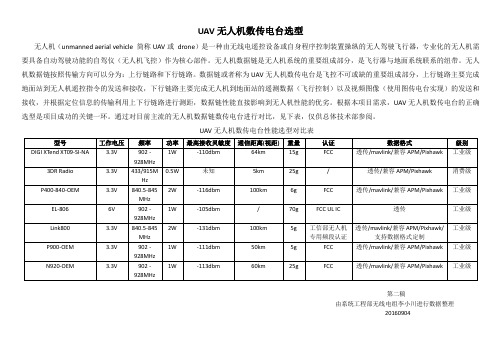
UAV无人机数传电台选型无人机(unmanned aerial vehicle 简称UAV或drone)是一种由无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器,专业化的无人机需要具备自动驾驶功能的自驾仪(无人机飞控)作为核心部件。
无人机数据链是无人机系统的重要组成部分,是飞行器与地面系统联系的纽带。
无人机数据链按照传输方向可以分为:上行链路和下行链路。
数据链或者称为UAV无人机数传电台是飞控不可或缺的重要组成部分,上行链路主要完成地面站到无人机遥控指令的发送和接收,下行链路主要完成无人机到地面站的遥测数据(飞行控制)以及视频图像(使用图传电台实现)的发送和接收,并根据定位信息的传输利用上下行链路进行测距,数据链性能直接影响到无人机性能的优劣。
根据本项目需求,UAV无人机数传电台的正确选型是项目成功的关键一环。
通过对目前主流的无人机数据链数传电台进行对比,见下表,仅供总体技术部参阅。
UAV无人机数传电台性能选型对比表型号工作电压频率功率最高接收灵敏度通信距离(视距) 重量认证数据格式级别DIGI XTend XT09-SI-NA 3.3V 902 -928MHz1W -110dbm 64km 15g FCC 透传/mavlink/兼容APM/Pixhawk 工业级3DR Radio 3.3V 433/915MHz0.5W 未知5km 25g / 透传/兼容APM/Pixhawk 消费级P400-840-OEM 3.3V 840.5-845MHz2W -116dbm 100km 6g FCC 透传/mavlink/兼容APM/Pixhawk 工业级EL-806 6V 902 -928MHz1W -105dbm / 70g FCC UL IC 透传工业级Link800 3.3V 840.5-845MHz 2W -131dbm 100km 5g 工信部无人机专用频段认证透传/mavlink/兼容APM/Pixhawk/支持数据格式定制工业级P900-OEM 3.3V 902 -928MHz1W -111dbm 50km 5g FCC 透传/mavlink/兼容APM/Pixhawk 工业级N920-OEM 3.3V 902 -928MHz1W -113dbm 60km 25g FCC 透传/mavlink/兼容APM/Pixhawk 工业级第二稿由系统工程部无线电组李小川进行数据整理20160904。

基于GSM通信技术的无线测控系统设计
邢建春;方虎生;王平;刘广;文江
【期刊名称】《计算机测量与控制》
【年(卷),期】2004(12)4
【摘要】传统的使用类似于数传电台的无线通信设备为通信手段的计算机无线测量与控制系统,建设和维护费用高,不能满足工程上大地理范围的测量与控制要求.通过对GSM通信系统的研究,将GSM移动通信终端模块嵌入到测控系统中,设计出相应的软硬件和测控模块,实现了利用GSM通信网络完成计算机测控系统的无线测量与控制.工程实践表明基于GSM通信网络的无线测控系统,非常适合大范围的无线测控应用场合,同时系统还具有通用性好、地理覆盖面广、免调试维护、低廉的建设与运营费和控制方式灵活等优点.
【总页数】4页(P345-348)
【作者】邢建春;方虎生;王平;刘广;文江
【作者单位】解放军理工大学,国防工程自动化研究所,江苏,南京,210007;解放军理工大学,国防工程自动化研究所,江苏,南京,210007;解放军理工大学,国防工程自动化研究所,江苏,南京,210007;解放军理工大学,国防工程自动化研究所,江苏,南
京,210007;解放军理工大学,国防工程自动化研究所,江苏,南京,210007
【正文语种】中文
【中图分类】TP274
【相关文献】
1.基于GSM通信技术的无线测控系统设计的分析 [J], 王小文
2.基于光电监测及无线网络通信技术的无线交通监测控制系统 [J], 张静
3.基于GSM手机的远程无线测控系统设计 [J], 姜平;陈虹吉
4.基于无线串口及GSM通信技术的氧化锌避雷器在线监测仪 [J], 江阳;何青
5.基于光电监测及无线网络通信技术的无线交通监测控制系统 [J], 张静
因版权原因,仅展示原文概要,查看原文内容请购买。
探讨PC104的无人直升机飞行控制系统设计1. 引言现今无人机(UAV)的研究和发展越来越受到世界各国的重视。
其中飞行控制系统是无人直升机飞行控制的核心部分。
飞行控制系统的复杂性和实时性对所使用的嵌入式控制系统软件有很高的要求,而Linux 系统基本可以满足要求,同时由于其开源特性,正越来越多的被应用于飞控系统设计开发中,目前较为成熟的嵌入式Linux 系统多建立于ARM 系列芯片上,其具有开发时间短、可参考资料多、开发成熟度高、能耗低、体积小的优点,因此在民用嵌入式解决方案中被广泛采用。
但基于ARM 的系统由于其自身结构的限制,并不适用于高计算强度、高可靠性的应用。
所以本文提出了一种基于AMD Geode 系列处理器的PC/104模块加定制Linux 系统的控制系统方案提高该系统的可靠性。
2. 系统总体设计说明本文所研究的直升机飞行控制系统,其硬件由双工数传电台、飞控计算机、下级控制器、捷联惯导系统、发动机控制单元ECU、任务设备管理器、R/C 接收机、地面测控系统等组成。
PC/104的外部接口包括一个I/O模块和四个串口。
其中任务设备管理器通过I/O模块和机载的任务设备进行通讯,传输的信号为模拟信号和数字信号;串口分别和数传电台、捷联惯导系统、下位机控制器和发动机控制器进行通讯。
捷联惯导系统通过串口为飞控计算机提供无人直升机飞行过程中所有的飞行状态和导航信息,包括姿态角、航向角、三轴角速率、三轴线速度、线加速度、飞行位置等等。
捷联惯导系统还通过串口和下位机控制器相连接。
数传电台用于和地面测控系统进行无线链路通讯。
它接收地面测控系统的控制指令进行自主及各种模态的自动飞行以及机载工作设备的管理和控制等。
而地面测控系统通过数传电台接收机上的各种遥测信息、系统状态数据、任务工作设备的状态数据等。
下位机控制器通过串口和飞控计算机相连,接收其控制器输出信号,驱动总矩、俯仰、横滚和方向舵机的运动;在系统调试阶段利用RC遥控器共同完成无人直升机的手动模式飞行。
基于无线数传模块的无人机通信系统设计雷立动;裴海龙【摘要】To extend the distance of flight for UAV, communication system using wireless data transmission module as information carrier is designed. The system consists of slave module and master module. The function of slave module is to process control data of the remote control and RTCA standard DGPS data, a data format transmitting both the information all together is presented. The master module is used to obtain the information respectively for high precise positioning GPS data and servo control. The flight experiment proves that, compared to the traditional signal transmission with radio transmitter and receiver, this system not only breaks the limit of distance for radio communication, also eliminates disturbance of the electormagnetic fileds on radio signal effectively.%为提高无人机飞行的距离,设计了利用无线数传模块作为载体的通信系统;该系统分为下位机模块和上位机模块两部分,其中下位机模块主要处理遥控器控制信息和RTCA格式差分GPS信息并提出了一种同时传输这两种信息的数据格式;上位机模块则分别获取这两种信息用于得到高定位精度GPS数据和控制舵机;试飞实验表明,与传统的利用无线电发射机和接收机传输相比,该系统不仅能突破无线电通信距离的限制,还能有效消除外界电磁场对无线电信号的干扰.【期刊名称】《计算机测量与控制》【年(卷),期】2012(020)002【总页数】4页(P460-463)【关键词】无人直升机;通信系统;无线数传模块;RTCA格式;差分GPS【作者】雷立动;裴海龙【作者单位】华南理工大学自动化科学与工程学院,广东广州 510640;华南理工大学自动化科学与工程学院,广东广州 510640【正文语种】中文【中图分类】TH873.70 引言作为空中机器人的无人驾驶直升机,由于其具有垂直起降、悬停、巡航以及快速改变航向的特点并能在恶劣、复杂甚至极端危险的环境下作业等诸多性能,其应用也越来越广泛。
___________________________________________信息记录材料2021年5月第22卷第5期(信息:技术与应用]Pixhawk飞控在无人机中的应用研究卢孟常(贵州航天职业技术学院贵州遵义563000)【摘要】飞行控制器(飞控)作为无人机的控制大脑,是无人机能保持稳定飞行姿态的核心部件,Pixhawk飞控是一款性能优良的开源飞控,因其性能稳定、通用性强以及价格低廉等优势得到了广泛的应用。
本文以Pixhawk飞控为研究对象,对在无人机调试中的故障成因、功能应用等问题进行研究,给使用者提供一定的参考价值。
【关键词】无人机;Pixhawk飞控;调试;故障分析【中图分类号】TP39【文献标识码】A【文章编号】1009-5624(2021)05-0151-031引言Pixhawk系列飞控一经推出就广受好评,这主要得益于其硬件和软件完全开源且功能强大,无人机设计公司和无人机爱好者可以来做应用研究和二次开发。
因该飞控系列产品还在不断推陈出新,性能在不断完善,在利用软件进行调参时,相对其他飞控产品较复杂,易出现无法解锁、调试失败的情况,这就需要使用者对飞控的应用功能和调试故障进行深度分析、总结发生问题的成因,针对以上问题,本文做了一定程度的归纳和总结。
2Pixhawk飞控简介目前市场上的无人机飞控品牌繁多,比如:大疆、零度智控、极翼、APM和PIX(Pixhawk)等,其硬件结构基本都集成了陀螺仪、加速度计、磁力计、GPS、气压计等,这些传感器与飞控的MCU以及伺服机构控制单元共同配合控制,保证了无人机飞行姿态的稳定「Pixhawk飞控是著名飞控厂商3DR推出的新一代开源、高效的飞行控制器[1]。
功能上支持多旋翼、固定翼和直升机等多种无人机型,配合Mission Planner地面站软件使用,可以完成对飞控的在线烧写固件、调参,使用无线数据传输系统建立地面站与自驾仪之间的通信,构建了一套无人机自动控制系统[2]oPixhawk飞控的前身是APM飞控,后面通过传感器和主控芯片的升级推出了PX4,在PX4的基础上又推出了PixhawkoPixhawk的飞行控制器采用的是双处理器结构,即由一个主处理器和一个备用处理器构成,这样设计的好处是当主处理器出现异常死机,备用处理器可以接管过来继续正常工作,极大地保障了系统的可靠性和稳定性。