机械手三菱PLC控制系统的设计
- 格式:doc
- 大小:232.50 KB
- 文档页数:11
一、要求机械手的PLC控制1.设备基本动作:机械手的动作过程分为顺序的8个工步:既从原位开始经下降、夹紧、上升、右移、下降、放松、上升、左移8个动作后完成一个循环(周期)回到原位。
并且只有当右工作台上无工件时,机械手才能从右上位下降,否则,在右上位等待。
2.控制程序可实现手动、自动两种操作方式;自动又分为单工步、单周期、连续三种工作方式。
3.设计既有自动方式也有手动方式满足上述要求的梯形图和相应的语句表。
4. 在实验室实验台上运行该程序。
二参考1. “PLC电气控制技术——CPM1A系列和S7-200”书中212页“8.1.3机械手的控制”2. “机床电气控制”第三版王炳实主编书中156页“三、机械手控制的程序设计”。
3.“可编程控制器原理及应用”宫淑贞徐世许编著人民邮电出版社书中P168—P175例4.6。
其中工作方式时手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)。
注解:“PLC电气控制技术——CPM1A系列和S7-200”书中212页“8.1.3机械手的控制”例中只有手动和自动(连续)两种操作模式,使用顺序控制法编程。
PLC 机型选用CPM2A-40型,其内部继电器区和指令与CPM1A系列的CPM有所不同。
“机床电气控制”第三版王炳实主编书中156页“三、机械手控制的程序设计”。
本例中的程序是用三菱公司的F1系列的PLC指令编制。
有手动、自动(单工步、单周期、连续)操作方式。
手动方式与自动方式分开编程。
参考其编程思想。
“可编程控制器原理及应用”宫淑贞徐世许编著人民邮电出版社书中P168—P175例4.6。
其中工作方式有手动、自动(单步)、单周期、连续;还有自动工作方式下的误操作禁止程序段(安全可靠)。
用CPM1A编程。
这里“误操作禁止”是指当自动(单工步、单周期、连续)工作方式时,按一次操作按钮自动运行方式开始,此后再按操作按钮属于错误操作,程序对错误操作不予响应。
基于三菱PLC的机械手控制系统设计毕业设计机械手是一种广泛应用于工业生产的设备。
在传统工艺中,采用继电器控制时需要使用大量的继电器,接线复杂,容易出现故障,维修困难,费时费工,增加了成本,影响了设备的工效。
因此,采用可编程控制器(PLC)对机械手进行控制是一种更加可靠、方便的方法。
本文介绍了使用XXX生产的F1/F2系列PLC对机械手进行控制的设计方案。
该方案根据机械手的运动规律进行软件编程,实现了手动操作和自动操作。
采用梯形控制直观易懂,PLC控制使接线简化,安装方便,减少了维修量,提高了工效。
第一章 PLC的技术简述1.1 PLC的定义PLC是一种可编程控制器,是一种数字计算机,可用于控制各种工业过程,包括机械手的控制。
PLC通过数字输入和输出模块与外部设备进行通信,通过编程实现对设备的控制。
1.2 PLC的特点PLC具有可编程性、可靠性、灵活性、扩展性等特点。
它可以根据不同的应用需求进行编程,可以适应不同的工业环境,具有较高的可靠性和稳定性,可以方便地进行扩展和升级。
1.3 PLC的一般结构PLC一般由中央处理器、存储器、输入模块、输出模块、通信模块等组成。
其中,中央处理器是PLC的核心部件,负责执行程序和控制设备。
存储器用于存储程序和数据。
输入模块用于接收外部设备的信号,输出模块用于控制外部设备的动作,通信模块用于与其他设备进行通信。
1.4 PLC的基本工作原理PLC的基本工作原理是通过输入模块接收外部设备的信号,经过中央处理器进行处理,然后通过输出模块控制外部设备的动作。
PLC的程序是由用户编写的,可以根据实际需求进行修改和升级。
PLC的输入和输出可以根据需要进行扩展,以适应不同的应用场合。
第二章机械手控制系统的控制要求2.1 工作对象的介绍机械手是一种用于自动化生产的设备,可以完成各种物料的搬运、装卸、组装等操作。
机械手的控制需要考虑到其运动规律和工作对象的特点。
2.2 工作原理机械手的工作原理是通过电机驱动各个关节进行运动,实现对工作对象的搬运、装卸、组装等操作。
韶关市职工大学韶关市第二技师学院毕业论文题目:三菱plc控制机械手设计系统系别:电气自动化工程系专业系别:14电气自动化双高学生姓名:饶金荣学号:42指导教师:王建军老师温惠萍老师李集祥老师摘要可编程序控制器(PLC)是近年来发展极为迅速,应用面极广,以微处理器为核心,集微机技术、自动化技术、通信技术于一体的通用工业控制装置。
PLC的广泛应用,已经给生产带来许多的好处,它具有功能齐全、使用方便、维护容易、通用性强、可靠性好、性能价格比高等特点,已在工业控制的各个领域得到了极为广泛的应用,成为实现工业自动化的一种强有力工具。
比如plc控制的机械手在搬运工件方面的应用,以前一直采用人工搬运物料,不仅工人的劳动强度大,安全性差,而且效率低。
本文分析了机械手和PLC之后,我们采用PLC控制的机械手进行物件的搬运来代替人力。
本文基于汇川公司的PLC,提出了PLC控制工件传送机械手PLC控制系统的设计方法。
重点研究了实验开发系统的工作原理、硬件部分的主要构成,以及硬件部分的设计、安装调试和实验应用开发。
讨论了汇川PLC指令系统、编程语言和程序设计方法,分析了汇川PLC专用编程软件在本系统中具体应用,关键词:机械手,PLC,第一章概述1.1 PLC产生、定义及发展趋势1.1.1 PLC(可编程逻辑控制器)的产生PLC(可编程逻辑控制器)是20世纪60年代末期逐步发展起来的一种以计算机技术为基础的新型工业控制装置。
近几年来,PLC技术在各种工业过程控制、生产自动线控制及各类机电一体化设备控制中得到极其广泛的应用,成为工业自动化领域中的一项十分重要的应用技术。
在PLC出现以前,继电器控制曾得到广泛应用,在机电设备和工业过程控制领域中占有主导地位。
但是继电器控制系统有明显的缺点;体积大,可靠性低,故障查找困难,特别是因为它是由硬接线逻辑构成的系统,造成了接线复杂,容易出故障,对生产工艺变化的适应性较差。
20世纪60年代未,美国最大的汽车制造商通用汽车公司(GM)为了适应汽车型号不断更新的需要,试图寻找一种新的生产线控制方法,使之尽可能地减少重新设计继电器控制系统的工作量以及尽量地减少控制系统硬连接线的数量,以降低生产成本,缩短制造周期,减少生产线的故障率,从而有效地提高生产效率。
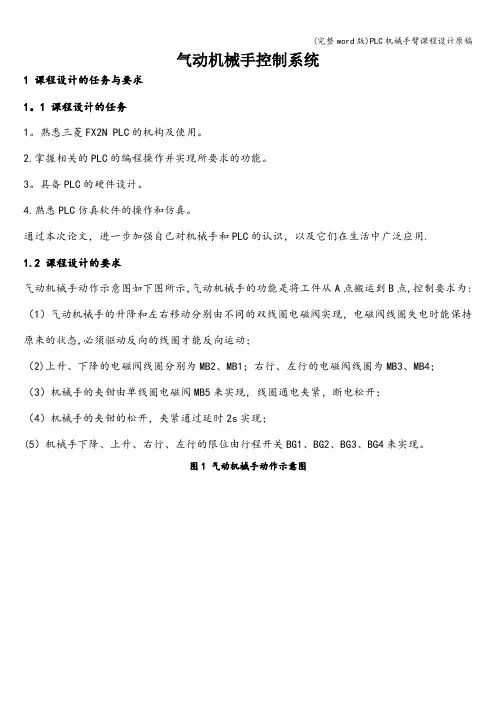
气动机械手控制系统1 课程设计的任务与要求1。
1 课程设计的任务1。
熟悉三菱FX2N PLC的机构及使用。
2.掌握相关的PLC的编程操作并实现所要求的功能。
3。
具备PLC的硬件设计。
4.熟悉PLC仿真软件的操作和仿真。
通过本次论文,进一步加强自己对机械手和PLC的认识,以及它们在生活中广泛应用.1.2 课程设计的要求气动机械手动作示意图如下图所示,气动机械手的功能是将工件从A点搬运到B点,控制要求为:(1)气动机械手的升降和左右移动分别由不同的双线圈电磁阀实现,电磁阀线圈失电时能保持原来的状态,必须驱动反向的线圈才能反向运动;(2)上升、下降的电磁阀线圈分别为MB2、MB1;右行、左行的电磁阀线圈为MB3、MB4;(3)机械手的夹钳由单线圈电磁阀MB5来实现,线圈通电夹紧,断电松开;(4)机械手的夹钳的松开,夹紧通过延时2s实现;(5)机械手下降、上升、右行、左行的限位由行程开关BG1、BG2、BG3、BG4来实现。
图1 气动机械手动作示意图2气动机械手控制系统设计方案制定本设计采用三菱系列PLC设计下图为一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成.当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止.另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。
设备装有上、下限位开关和左、右限位开关,它的工作过程如图所示,有八个动作,即为:原位下降夹紧上升右移左移上升放松下降图2 机械手的动作周期3气动机械手控制系统设计方案实施3.1气动机械手控制系统电路元器件选择为实现设计目的,本设计需用到两台三相电机,4个接触器,4个继电器.其中M1三相电机控制机械手臂的上下移动(KM1闭合M1电动机正转,机械手臂下降;KM2闭合M1电动机反转,机械手臂上升);M2三相电机控制机械手臂的左右移动(KM3闭合M2电动机正转,机械手臂右移;KM4闭合M2电动机反转,机械手臂左移)。

2019年33期设计创新科技创新与应用Technology Innovation and Application基于三菱PLC 的机器人自动码垛控制系统设计曾新红(广州航海学院电气工程系,广东广州510725)引言当前,无论是从国外引进的自动化生产线,还是自行设计的自动控制系统,普遍把可编程控制器作为控制系统的核心器件[1]。
随着工业技术和计算机信息技术的发展,以及工业自动化程度的不断提高,智能制造生产工艺越来越受到人们的青睐。
机械手作为最早出现的工业机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、自动化生产线等行业。
本系统设计采用三菱PLC 和ABB120六轴机械手实现生产线物品自动码垛过程。
1基于三菱PLC 的机械手控制系统组成机械手码垛控制系统主要由PLC 、机械手、步进电机、触摸屏和空气压缩机等构成。
PLC 产生脉冲经过驱动器驱动步进电机运行,带动皮带轮运转。
物品由皮带轮输送,到位后发出信号给机械手操作码垛。
该系统设计了3个传送带分别输送1号物品、2号物品和3号物品,机械手按要求分别操作码垛3组物品。
3组物品由仓库移出时采用气动阀驱动,机械手抓取物品也由气动阀驱动。
所有的气动阀气流均由一台空压机供给。
图1为控制系统组成图。
采用ABB120六轴机械手。
图1中系统可分为:执行机构、信号检测机构、控制机构三大部分,机器人自动码垛控制系统以码垛物料为控制目标,搬运的物料具有一定的规则形状,该设计系统中,物料首先从储物架按一定顺序下落,检测有物料过来时,PLC 驱动步进电机带动皮带轮运送物料,待到指定位置后,机器人通过搬运夹具把物料从皮带末端搬运到码垛平台上。
第一阶段为在1号位将方形小箱体码垛成4×3×2的椎体垛状。
完成码垛要求后,自动进入下一步2号位码垛工作,将物料箱体码垛成所需形状。
码垛完成后再自动进入3号位码垛工作,形状设计按需所置,直至摘要:随着自动化程度的日益进步,智能机器在工业生产自动化过程中应用日益普遍,智能制造生产工艺也日益受到人们的青睐。
基于PLC的机械手自动操作系统设计毕业论文1绪论1.1课题提出背景如今,机械自动化已经成为了新时代的主题。
其中,机械手是工业生产过程中应用最多的,而且它的发展也是最快的。
工业生产自动化的程度越来越高,而生产环境变得越来越恶劣,这样对工人提出了更高的要求,比如安全性、健康性、环保性等。
机械手可以有效的解决这个问题,它可以在高温、高压、有毒、放射性等场合应用。
在机械制造行业中,机械手又称工业机器人,它主要被应用于运送加工原料或者给特定的机床进行刀具的转换和机器的装配等一些自动化流水生产线上。
综上所述,机械手的应用更加有效率,同时还能降低生产成本。
机械手是一门综合性的学科,它包含了机械、电子、材料、自动控制等许多学科方面的知识。
随着计算机和电子技术的飞速发展,机械手也不断的更新换代,朝着精密化、智能化、复杂化的方向发展。
如今的机械手加入了传感器反馈系统,当机械手发生故障时,它可以自我检测,并且自动修复。
工业的自动化程度的高低离不开PLC,它的控制能力越高,自动化的程度也越高。
所以PLC常被用于工业生产中,随着它的地位逐渐增长,它的功能也随之有了很大的提高。
对于PLC而言,它的程序编写容易、系统操作灵活,同时对于控制也方便实现,这样能够提高工业生产的效率和加工的质量。
在一些恶劣的环境下,PLC同样能够取代人类去完成一些控制,从另一方面而言,成本也相对减轻了许多。
基于PLC设计的机械手自动操作系统,更加容易实现生产的连续性。
在本次设计任务中,选用三菱系列的PLC对机械手进行控制,完成自动操作系统的设计。
实现对机械手的上下、左右、旋转等控制,要完全实现这些,还需要其它辅助元器件,比如气缸、传感器、电磁阀、底座和支架等。
为了能够更加直观的对机械手的动作进行展示,在本次设计中加入了组态软件对机械手进行监控。
MCGS是一种用于对机械手整体监控的一种组态软件,通过对机械手运动数据的采集,MCGS以动画形式表现,对机械手的运动过程进行监控和整个流程的控制。
三菱PLC控制系统设计方案1、三菱PLC重视安装:提高三菱PLC控制系统可靠性是一项长期、持久的工作。
首先,施工和安装是非常重要的环节,必须严格把关,这样可减少投产故障率。
其次,要保证检修质量,特别是技改线路改动和系统改造,是目前的当务之急。
否则,几年的系统改造后,大量线路的更换,线号丢失及程序变更,该记录备份的没有做记录等。
致使维护工作量加大,可靠性得不到保证。
这一项是人们极易疏忽的,必需引起高度重视。
2、三菱PLC老化筛选法通常我们用“老化筛选”的方法,就是结束“早期”,延长“偶然期”,“损耗期”及时更换来提高三菱PLC系统的可靠性。
该方法主要用于不可修复元件。
三菱PLC控制系统的失效率是与时间有关。
我们将设备元件的故障率y(t)随时间变化划分为三个时期进行分析,这种变化曲线通常称故障率曲线也称为浴盆曲线。
(1)早期故障较高(O~t0期间)。
主要是由于系统内在设计错误、元器件质量、安装和工艺缺陷等不合理原因引起,但随时间的增加故障率迅速降低。
这一时期的主要任务是尽早找出不可靠的因素使系统尽快稳定下来。
(2)偶然期故障期(t0~t1期间)比较稳定,也可称为随机故障期。
此时期故障是随机发生的,系统的故障率最低而且稳定,可视为常数。
这一时期是系统的最佳状态期,在运行中应以加强维护延长这段时期的时间,应做好定期检修和维护工作。
(3)损耗期(t1之后)故障率上升,这是因为常时间以来构成系统的某些零件已经老化耗损,寿命衰竭机械和电气磨损以及绝缘的老化所引起。
在这段时期中大部分元件要开始失效。
如能事先知道损耗开始的时间,事先更换元器件,延长系统的有效寿命。
推迟耗损故障期的到来。
3、三菱PLC控制系统的安全设计方法尽管三菱PLC的运行是安全、可靠的,作为一个系统来说,稳定可靠仍然是不可忽视的问题.系统安全设计要充分利用三菱PLC的特点,使三菱PLC的运行能真正达到安全、可靠。
(1)硬件保护。
主要包括:联锁保护、限位保护和急停保护等。

物料搬运机械手系统PLC 编程设计课程名称:可编程控制器原理及应用 任课教师:冯治国老师 班级:机制102班 学号: 姓名:一、设计题目及概述(一) 设计题目如图1所示为一简易物料搬运机械手的工艺流程图。
该机械手是一个水平/垂直位移的机械设备,其操作是将工件从左工作台搬运到右工作台,由光耦合器VLC 来检测工作台上有没有工件。
机械手通常位于原点,它的动作全部由气缸驱动,而气缸则由相应的电磁阀控制。
其中,上升/下降和左移/右移分别由双线圈二位电磁阀控制,放松/夹紧由一个单线圈二位电磁阀(称为夹紧电磁阀>控制。
成绩图1 简易物料搬运机械手(二)设计概述PLC控制系统的设计包括3个重要的环节,其一是通过控制任务的分析,确定控制系统的总体设计方案;其二是根据控制要求确定硬件构成方案;其三是设计出满足控制要求的应用程序。
二、对设计任务的深入调查研究(一)机械手的工作方式此系统需要具备多种工作方式,如既能自动的循环运行一个过程,也能进行手动操作运行一个工作步等。
常见的工作方式有联系、单周期、单步和手动。
1.单周期方式机械手在原位压左限位开关和上限位开关。
按一次操作按钮机械手开始下降,下降到左工位压动下限位开关后自停;接着机械手夹紧工件后开始上升,上升到原位压动上限位开关后自停;接着机械手开始右行直至压动右限位开关开关后自停;接着机械手下降,下降到右工位压动下限位开关<两个工位用一个下限位开关)后自停;接着机械手放松工件后开始上升直至压动上限位开关后自停<两个工位用一个上限位开关);接着机械手开始左行直至压动左限位开关后自停。
至此一个周期的动作结束,再按一次操作按钮则开始下一个周期的运行。
2.连续方式启动后机械手反复运行上述每个周期的动作过程,即周期性连续运行。
3.单步方式每按一次操作按钮,机械手完成一个工作步。
例如,按一次操作按钮机械手开始下降,下降到左限位压动下限位开关自停,欲使之运行下一个工作步,必须再按一次操作按钮等。
三菱PLC机械手臂课程设计课程设计任务:三菱PLC机械手臂一、设计要求本次课程设计旨在设计一个基于三菱PLC(可编程逻辑控制器)的机械手臂控制系统。
该机械手臂应具备以下功能:1.机械手臂可以完成伸缩、升降、旋转等动作。
2.机械手臂的运动方式应可以通过手动、单步和自动三种方式进行控制。
3.当机械手臂在运动过程中遇到障碍物时,应能够自动停止并报警。
4.机械手臂控制系统应具备可靠性高、稳定性好、响应速度快等优点。
二、设计思路1.硬件设计(1)选择合适的PLC:考虑到控制系统的复杂性和性价比,选用三菱FX2N系列PLC作为主控制器。
该系列PLC具有丰富的I/O接口和强大的指令集,能够满足本次设计的控制需求。
(2)选择合适的传感器:为了实现自动控制,需要使用传感器检测机械手臂的位置和运动状态。
选用光电编码器和限位开关作为传感器,前者用于检测旋转角度,后者用于检测上下和左右移动的极限位置。
(3)选择合适的执行器:机械手臂的执行器包括电机、气缸等,根据实际需要选择合适的执行器,并设计相应的驱动电路。
2.软件设计(1)编写控制程序:根据设计要求,编写控制程序,实现手动、单步和自动三种控制方式。
程序中应包括运动控制、障碍物检测、报警处理等模块。
(2)调试程序:通过模拟实验和实际操作对程序进行调试和优化,确保机械手臂运动平稳、响应速度快、可靠性高。
三、机械手臂动作流程图(略)四、总结与展望本次课程设计通过三菱PLC实现了机械手臂的控制,实现了伸缩、升降、旋转等动作,同时具备手动、单步和自动三种控制方式。
通过障碍物检测和报警处理等功能提高了系统的可靠性和稳定性。
选用合适的PLC和传感器,结合控制算法,实现了对机械手臂的精确控制。
通过本次课程设计,我们深入了解了PLC控制系统的设计和应用,提高了解决实际问题的能力。
未来可以进一步研究机械手臂的智能化和自主化,通过引入机器视觉等技术实现更复杂的动作识别和控制。
图书分类号:密级:毕业设计(论文)基于三菱PLC的机械手控制系统设计DESIGN OF MANIPULATOR CONTROL SYSTEM BASED ONMITSUBISHI PLC学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日学位论文版权协议书本人完全了解关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归所拥有。
有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要在机械加工行业,机械手使用的已经很多了,是自动化生产中最为重要的元素,现在车间工人的劳动环境改善了很多,劳动生产率也是提高了很多。
本文设计的是基于三菱PLC的机械手控制系统设计,该机械手主要由L1-25型单向节流阀和24D2H-15-S1型二位五通电磁阀组成的气压回路驱动,由气动机械手实现物件的抓取,利用气缸实现物件的移动,采用行程开关来实现物料的摆放,运用欧光PSD-1010(2D-PSD)光电位敏传感器来检测工件的位置,最后使用三菱FX2N-48MR来控制电磁阀,从而实现机械手臂的旋转-下降-伸出-夹紧-收回-上升-旋转-下降-松开-上升的控制功能。
关键词机械手;PLC;气压驱动;电气元件AbstractIn the machining industry, the robot has been used a lot, is the automated production of the most important elements of plant workers are now a lot of work to improve the environment, labor productivity is also improved a lot.This design is based on the Mitsubishi PLC robot control system design, the robot consists of L1-25 type way throttle and 24D2H-15-S1 type two five-way solenoid valve pneumatic circuit is driven by a pneumatic manipulator to achieve the object crawl, mobile air cylinder to achieve the object, using the limit switch to achieve the display of materials, the use of European light PSD-1010 (2D-PSD) position sensitive photoelectric sensor to detect the position of the workpiece, last used to control the Mitsubishi FX2N-48MR solenoid valve, in order to achieve the rotating mechanical arm - the drop - projecting - clamping - recover - rising - rotation - fall - Release - increased control functions.Keywords Manipulator; PLC;Pneumatic drive;Electrical components目录摘要 (I)Abstract (II)目录 (III)1 绪论 (1)1.1 机械手的概述 (1)1.1.1 机械手的设计背景 (1)1.1.2 机械手的组成 (2)1.1.3 机械手的分类及应用组合 (2)1.2 机械手的发展及现状 (3)1.2.1机械手的发展 (3)1.2.2 PLC控制系统的引用 (4)1.3 本课题研究的主要内容及技术路线 (5)1.3.1 本课题研究的主要内容 (5)1.3.2 本课题研究的技术路线 (5)1.4 控制要求及机械手参数 (6)1.4.1 控制要求 (6)1.4.2 机械手的相关参数 (6)2 机械手的机械设计 (7)2.1 执行机构的设计 (7)2.1.1 工作原理及组成 (7)2.1.2 基本形式的选择 (7)2.1.3 机械手的结构设计 (8)2.1.4机械手外观简图 (9)2.2 驱动机构的设计 (9)2.2.1 工作原理的确定 (10)2.2.2 气动元件的选择 (10)3 机械手的硬件设计 (14)3.1 PLC的介绍 (14)3.2 电气元件的选型 (16)3.2.1 限位开关的选择 (16)3.2.2 传感器的选择 (17)3.2.3 接触器的选择 (17)3.3 PLC选型 (18)3.4 I/O设计 (18)3.5 PLC接口分布图 (19)4 机械手的软件设计 (20)4.1 流程图 (20)4.2 梯形图 (21)4.3 调试 (25)结论 (26)致谢 (27)参考文献 (28)附录 (29)附录1 气压控制原理图 (30)附录2 输入输出分配表 (30)附录3 外部接线图 (31)附录4 状态控制图 (31)附录5 梯形图 (32)1绪论机械手诞生在上世纪六十年代,到现在也发展了四十多年了,现在机械手是工业化制造里面一个自动化的关键装置。
摘要机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由手部和运动机构组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。
为了抓取空间中任意位置和方位的物体,需有6个自由度。
自由度是机械手设计的关键参数。
自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。
一般专用机械手有2~3个自由度。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。
有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手关键词:点控制机械手连续控制机械手可编程控制技术AbstractThe manipulator can imitate the manpower and the arm certain movement functions, with by presses the fixed routine to capture, the transporting thing 'or' operation tool automatic operation installment. It may replace human's strenuous labor by to realize the production mechanization and the automation, can operate under the harmful environment by protects the personal safety ,Thus widely applies in department and so on machine manufacture, metallurgy, electron, light industry and atomic energy.The manipulator mainly is composed by the hand and the motion. The hand is uses for to grasp holds the work piece (or tool) a part, according to is grasped holds the thing the shape, the size, the weight, the material and the work request but has the many kinds of structural style , Like supporting on both sides, request holding and adsorption and so on. motion , causes the hand to complete each kind of rotation (to swing), the migration or the compound motion realizes the stipulation movement , the change is grasped holds the thing the position and the posture. The motion fluctuation, the expansion and contraction, revolves and so on the independence movement way , is called manipulator's degree of freedom. In order to capture in the space the free position and the position object , must have 6 degrees of freedom. The degree of freedom is the essential parameter which the manipulator designs. The freedom goes past much , manipulator's flexibility is bigger ,the versatility is broader , Its structure is also more complex. The common special-purpose manipulator has a 2~3 degree of freedom..The manipulator usually serves as the engine bed or other machines add-on components , like on automatic engine bed or automatic production line loading and unloading and transmission work piece, Replaces the cutting tool in the processingcenter and so on, does not have the independent control device generally. Somewhat operates the equipment to need by the human direct control, like uses in the hostwhich the atomic energy department manages the dangerous goods from the type operator also often being called the manipulator.Keywords: position control manipulator continual trajectory control manipulatorPLC目录摘要 (Ⅰ)Abstract (Ⅱ)目录 (Ⅲ)1 绪论 (1)1.1 课题背景 (1)1.2 机械手的定义与分类 (2)1.3 机械手应用及组成结构 (2)1.4 机械手的发展趋势 (4)1.5 总体设计要求 (4)2 PLC的介绍与选择 (5)2.1 PLC的特点 (5)2.2 PLC的选型 (6)2.3 三菱FX系列的结构功能 (8)3 各功能实现形式与控制方式 (9)3.1 本机械手模型的机能和特性 (9)3.2 夹紧机构 (10)3.3 躯干 (10)3.4 旋转编码盘 (11)3.5 电源与传动整体 (12)3.5.1 控制电源 (12)3.5.2 传动整体 (13)4 控制系统设计 (13)4.1 控制系统硬件设计 (13)4.1.1 PLC梯形图中的编程元件 (14)4.1.2 PLC的I/O分配 (14)4.1.3 机械手控制系统的外部接线图 (16)4.2 控制系统软件设计 (17)4.2.1 公用程序 (17)4.2.2 自动操作程序 (18)4.2.3手动单步操作程序 (24)4.2.4 回原位程序 (27)参考文献 (31)致谢 (32)1 绪论1.1 课题背景随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋于恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。
江苏信息职业技术学院毕业设计报告毕业设计报告课题:机械手的PLC控制系部:机电系专业:电气自动化班级:电气1332姓名:王琪学号:2013321026指导老师:贾君贤2016-6摘要机械手是工业自动化系统中传统的任务执行机构,是机器人的关键部件之一。
机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、传感器、等电子器件组成。
该装置涵盖了可编程控制技术,位置控制技术、检测技术等,是机电一体化的典型代表仪器之一。
本文介绍的机械手是由PLC 输出三路脉冲,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC主机,通过交流电机的正反转来控制机械手手爪的张合,从而实现机械手精确运动的功能。
本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。
关键词:机械手 PLC 交流电机目录摘要 (1)引言 (3)第一章机械手机械结构 (4)1.1传动机构 (4)1.2机械手夹持器和机座的结构 (6)第二章机械手PLC及电机的应用 (8)2.1 PLC简介 (8)2.2 PLC内部原理 (10)2.3 机械手PLC选择及参数 (12)2.4 机械手电机的选用 (13)第三章机械手PLC控制系统设计 (14)3.1 机械手的工艺过程 (14)3.2PLC控制系统 (16)致答谢词 (21)参考文献 (21)引言在现代工业中,随着工业现代化的进一步发展,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等,已经随处可见。
同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有毒气体、有害气体场合以及水下作业等,这些恶劣的生产环境不利于人工进行操作。
工业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分。
韶关市职工大学韶关市第二技师学院毕业论文题目:三菱plc控制机械手设计系统系别:电气自动化工程系专业系别:14电气自动化双高学生姓名:***学号:42指导教师:王建军老师温惠萍老师李集祥老师摘要可编程序控制器(PLC)是近年来发展极为迅速,应用面极广,以微处理器为核心,集微机技术、自动化技术、通信技术于一体的通用工业控制装置。
PLC的广泛应用,已经给生产带来许多的好处,它具有功能齐全、使用方便、维护容易、通用性强、可靠性好、性能价格比高等特点,已在工业控制的各个领域得到了极为广泛的应用,成为实现工业自动化的一种强有力工具。
比如plc控制的机械手在搬运工件方面的应用,以前一直采用人工搬运物料,不仅工人的劳动强度大,安全性差,而且效率低。
本文分析了机械手和PLC之后,我们采用PLC控制的机械手进行物件的搬运来代替人力。
本文基于汇川公司的PLC,提出了PLC控制工件传送机械手PLC控制系统的设计方法。
重点研究了实验开发系统的工作原理、硬件部分的主要构成,以及硬件部分的设计、安装调试和实验应用开发。
讨论了汇川PLC指令系统、编程语言和程序设计方法,分析了汇川PLC专用编程软件在本系统中具体应用,关键词:机械手,PLC,第一章概述1.1 PLC产生、定义及发展趋势1.1.1 PLC(可编程逻辑控制器)的产生PLC(可编程逻辑控制器)是20世纪60年代末期逐步发展起来的一种以计算机技术为基础的新型工业控制装置。
近几年来,PLC技术在各种工业过程控制、生产自动线控制及各类机电一体化设备控制中得到极其广泛的应用,成为工业自动化领域中的一项十分重要的应用技术。
在PLC出现以前,继电器控制曾得到广泛应用,在机电设备和工业过程控制领域中占有主导地位。
但是继电器控制系统有明显的缺点;体积大,可靠性低,故障查找困难,特别是因为它是由硬接线逻辑构成的系统,造成了接线复杂,容易出故障,对生产工艺变化的适应性较差。
20世纪60年代未,美国最大的汽车制造商通用汽车公司(GM)为了适应汽车型号不断更新的需要,试图寻找一种新的生产线控制方法,使之尽可能地减少重新设计继电器控制系统的工作量以及尽量地减少控制系统硬连接线的数量,以降低生产成本,缩短制造周期,减少生产线的故障率,从而有效地提高生产效率。