新型车用磁流变阻尼器设计
- 格式:pdf
- 大小:336.57 KB
- 文档页数:4
磁流变阻尼器的动力学模型及其在车辆悬架中的应用研究一、本文概述随着现代科技的不断进步和汽车工业的飞速发展,车辆悬架系统作为影响车辆行驶平稳性和安全性的关键部分,其性能优化越来越受到人们的关注。
其中,磁流变阻尼器作为一种新型智能材料阻尼器件,以其独特的性能调控能力和快速响应特性,在车辆悬架系统中展现出广阔的应用前景。
本文旨在深入研究磁流变阻尼器的动力学模型,探索其在车辆悬架系统中的应用效果,为提升车辆行驶性能提供理论支持和技术指导。
本文将系统介绍磁流变阻尼器的基本原理和特性,包括其工作机理、力学特性和调控方式等。
在此基础上,建立磁流变阻尼器的动力学模型,通过理论分析和数值仿真,探讨其动力学特性及影响因素。
本文将研究磁流变阻尼器在车辆悬架系统中的应用,分析其对车辆振动特性和行驶稳定性的影响。
通过构建车辆悬架系统模型,结合仿真实验和实车测试,评估磁流变阻尼器在改善车辆行驶性能方面的实际效果。
本文还将对磁流变阻尼器在车辆悬架应用中的关键技术问题进行探讨,提出相应的解决方案和优化策略,为其在实际工程中的应用提供参考。
通过本文的研究,旨在推动磁流变阻尼器在车辆悬架系统中的应用发展,为提升车辆行驶性能、增强驾驶舒适性和安全性提供有力支持。
也为相关领域的研究人员和技术人员提供有益的参考和借鉴。
二、磁流变阻尼器概述磁流变阻尼器(Magnetorheological Dampers,简称MRDs)是一种基于磁流变液(Magnetorheological Fluid,简称MRF)的智能材料制成的被动或半主动控制元件,因其具有优良的阻尼特性和响应速度快等特性,近年来在车辆悬架系统、建筑振动控制以及军事领域等得到了广泛的应用。
磁流变液是一种由微米级铁磁颗粒和非导磁性载液混合而成的悬浮液,其粘度在磁场的作用下可以迅速并可逆地改变。
磁流变阻尼器正是利用了这一独特的物理特性,通过调整磁场强度,实现对阻尼力的连续、快速和可逆的控制。
新型磁流变液阻尼器的研究和开发近年来,随着科学技术的不断发展,新型材料的研究和开发成为了不少科研人员的重要研究领域。
其中,磁流变液阻尼器作为一种新型液压缓冲器,具有在工程领域应用广泛和优越的动态机械性能等优点,引起了众多科研人员的关注和研究。
本文将探讨新型磁流变液阻尼器的研究和开发。
磁流变液阻尼器是一种基于磁化沉淀的新型液压缓冲器,由主缸、活塞、工作腔、磁场发生器、控制系统等组成。
通过改变磁场的强度和方向,可以控制阻尼器内磁流变液的粘度和阻力。
相比传统的液压缓冲器,磁流变液阻尼器有着更加优越的动态性能,并且能够更加灵活地进行控制。
因此,磁流变液阻尼器在现代工程领域中得到了广泛应用,如汽车悬挂系统、工程机械阻尼器、风力涡轮机等。
然而,磁流变液阻尼器的研究和开发仍然存在着许多挑战和难点。
一方面,磁流变液阻尼器面临着磁场强度不易控制、磁流变液粘度易受到温度影响、磁场对液体金属性影响等技术问题。
另一方面,在研究和开发过程中也存在着设计和制造成本高、性能测试难度大、结构刚度与阻尼性能难以平衡等问题。
针对这些问题,科研人员采用了多种研究方法和技术手段,不断推进磁流变液阻尼器的研究和开发。
其中,磁流变液成分的优化和磁场控制技术是较为重要的研究领域之一。
通过改变磁场的强度和方向,可以实现对磁流变液沉淀程度和粘度的控制,从而达到阻尼器的灵活调控和阻尼性能的优化。
此外,科研人员还不断探索新的材料、新的工艺以及新的结构设计方法,优化磁流变液阻尼器的性能,并且逐步降低制造成本。
值得注意的是,虽然磁流变液阻尼器存在着一定的研究难度和技术挑战,但是其中的研究和开发成果对于推进科技进步和现代工程领域的发展具有重要的意义。
在科研人员持续的努力下,相信未来,新型磁流变液阻尼器的性能和应用前景将不断得到提高和拓展,对于实现现代工程的高效、安全、环保等目标发挥着不可替代的作用。
总之,新型磁流变液阻尼器的研究和开发是一个相对新颖和前沿的研究领域。
基于磁流变阻尼器的汽车座椅悬架系统天棚阻尼控制器_论文重庆大学本科学生毕业设计(论文) 基于磁流变阻尼器的车辆座椅悬架系统天棚阻尼控制器设计学生:李章洲学号:20083467指导教师:浮洁专业:电子科学与技术重庆大学光电工程学院二O一二年六月Graduation DesignThesis of Chongqing UniversitySkyhook controller design of vehicle seat suspension system based on magnetorheological damperUndergraduate: Li ZhangzhouSupervisor: Lec. Fu JieMajor: Electronic science and technologyCollege of Opto-electronic EngineeringChongqing UniversityJune 2012摘要座椅悬架作为汽车的重要组成部分,其作用是缓和不平路面传传递给乘客或司机的振动,提高乘坐和驾驶的舒适性。
现有座椅悬架多采用被动悬架,其参数不能根据路面的状况实时变化,减振效果不理想。
磁流变座椅悬架是一种半主动悬架,具有阻尼力可调范围大、响应快等优点。
因此,研究基于磁流变减振器的半主动悬架系统对改善座椅悬架的动态性能、提高汽车安全性和舒适性有着重要意义。
本文以磁流变座椅悬架系统为对象,在对悬架系统动力模型分析的基础上,设计天棚控制策略,实现振动衰减。
主要工作如下:(1)对目前座椅悬架系统的发展进行综述,阐述了研究半主动座椅悬架系统的意义,并分析磁流变阻尼器的常用控制策略,提出本文将要开展的工作,了解磁流变阻尼器和半主动悬架系统的国内外研究现状。
(2)了解磁流变液的特性和相关应用,掌握半主动悬架系统的研究方法,建立磁流变座椅悬架系统的动力学模型。
(3)对天棚控制算法进行研究,利用Matlab对悬架模型的传递函数进行幅频特性分析,求解出满足要求的天棚阻尼系数。

磁流变液阻尼器运行状态敏感电流源设计1、引言?汽车悬架系统阻尼特性的合理匹配对提高乘坐舒适性和操纵稳定性起着至关重要的作用。
目前,国外汽车制造商普遍采用更换不同阻尼特性的一系列阻尼器或者机械式可调阻尼器,主观与客观评价相结合的方法进行悬架阻尼参数的实验匹配[1~2],国内汽车企业尚需国外技术支持。
但该匹配法只能实现压缩阻尼与复原阻尼联动调节(或阻尼离散调节),很难实现悬架阻尼参数的最优与自动匹配,因此,研究具有自主知识产权和创新特色的自1、引言?汽车悬架系统阻尼特性的合理匹配对提高乘坐舒适性和操纵稳定性起着至关重要的作用。
目前,国外汽车制造商普遍采用更换不同阻尼特性的一系列阻尼器或者机械式可调阻尼器,主观与客观评价相结合的方法进行悬架阻尼参数的实验匹配[1~2],国内汽车企业尚需国外技术支持。
但该匹配法只能实现压缩阻尼与复原阻尼联动调节(或阻尼离散调节),很难实现悬架阻尼参数的最优与自动匹配,因此,研究具有自主知识产权和创新特色的自动匹配方法,对提高我国汽车悬架的开发能力具有重要的现实意义。
阻尼可调的磁流变阻尼器具有传统的被动液力阻尼器无可比拟的优点[3],利用它来代替人工调节机械式可调阻尼器研究汽车悬架阻尼参数的最优与自动匹配是一种较理想的选择。
汽车悬架阻尼参数自动匹配的理论方法与关键实现技术涉及一系列问题需要解决,研制成功能辨识汽车阻尼器运行状态(复原与压缩工况)的可控状态敏感电流源是关键技术之一,对于特定的汽车磁流变阻尼器,针对给定的激励条件,通过调节励磁电流实现阻尼器压缩与复原阻尼参数的独立调节,使汽车的操纵稳定性和乘坐舒适性达到最优,获取阻尼器在该激励下的阻尼特性,为成功开发出汽车悬架阻尼参数自动匹配装置奠定坚实的技术基础。
2、系统组成及软硬件设计2.1 系统工作原理及组成系统的工作原理是:在某一时刻,通过对固定于阻尼器活塞杆和工作腔上的传感器来的数据进行分析,判断出阻尼器与上一时刻比较是处于拉伸或是压缩状态,根据不同的状态,动态改变通过阻尼器励磁线圈的电流,引起内部磁场变化,从而达到改变其阻尼力的目的。
新型磁流变液体阻尼器的设计田玲;王焱玉;唐鸣【摘要】提出一种用于流体传动系统的磁流变液流动式阻尼器的设计方案,采用阻尼缸和阻尼阀并联的结构形式,阻尼阀长度不受系统气缸行程的限制.阻尼阀采用双线圈磁路设计,相对于普通阻尼器而言,该流动式阻尼器减少了导磁轴的横截面积,降低了漏磁的影响,具有体积小和结构紧凑的特点.实验结果表明该阻尼器用于实时气动伺服系统中能够实现系统的精确定位,其实时控制的稳定性、精确性、可靠性和快速响应性都有较大提高.【期刊名称】《桂林理工大学学报》【年(卷),期】2007(027)002【总页数】4页(P270-273)【关键词】磁流变液体(MRF);磁流变(MR)阻尼器;气动伺服系统【作者】田玲;王焱玉;唐鸣【作者单位】桂林电子科技大学,机电与交通工程系,广西,桂林,541004;桂林电子科技大学,机电与交通工程系,广西,桂林,541004;桂林航天工业高等专科学校,机械系,广西,桂林,541004;桂林电子科技大学,机电与交通工程系,广西,桂林,541004【正文语种】中文【中图分类】TH703.62流体传动装置广泛应用于各工业领域,但传统的气动位置伺服控制系统由于其工作介质具有较大的可压缩性,因而控制系统刚性差、抗负荷能力低,速度稳定性差、响应慢,系统的运行速度和定位精度较低[1].在要求快速响应和高精度定位的闭环系统中控制难度大:电-气比例伺服控制系统虽可实现多点定位,但系统元件多,结构复杂不易调节,且元件对空气的清洁度等性质非常敏感,因而国内外在气动伺服控制方面的研究较少.根据实际需求,笔者设计出一种采用流动模式的分体式阻尼器,该阻尼器具有体积小、结构紧凑、重量轻、阻尼力调节范围大等特点,可配合气动执行元件实现半主动控制,具有良好的速度平稳性和较高的位置控制精度.1 MR 阻尼器的结构将MR 阻尼器引入到气动伺服系统中与气压系统执行元件串联,通过对外加磁场大小的调节控制阻尼器的制动力从而达到调节回路流动阻尼的目的. MR 阻尼器与各种传感器结合构成的闭环控制系统节对控制对象的位移、速度、方向等参数进行控制和调节以实现精确的传动控制. 因此MR 阻尼器是整个系统的核心部件,其性能好坏直接影响到整个系统的工作性能.根据气动控制原理采用流动模式的分体式结构设计MR 阻尼器( 图1) ,包括磁流变液( MRF) 阻尼缸和MRF 阻尼阀2 个部分.其中MRF 阻尼缸的结构参数为:缸径25 mm,活塞杆直径10 mm.为了减小阻尼器的体积,改善漏磁,MRF 阻尼阀采用三段式[2]( 双线圈反并联绕制) 形式.2 MRF 阻尼阀的结构和磁路设计图1 MR 阻尼器的结构Fig.1 Structure of the MR damperMRF 阻尼阀的性能主要取决于结构、磁路以及磁流变液体的性能[3]( 图2) .阻尼阀的磁力线走向为:先通过阀芯,经过侧翼后穿过阀体与侧翼间的磁流变液到达阀体,再穿过侧翼与阀体间的磁流变液到达另一侧翼,最后回到阀芯,其中两线圈产生的磁场方向相反,以保证磁场在MR 阻尼器的中间侧翼为叠加.阻尼器参数包括环形间隙g、阀芯直径Dcore、磁轭直径Din、阀体外径Dout、侧翼长度lactive、阀芯总长lcore、阀体厚度lthickness.图2 MR 阻尼器的磁路设计Fig.2 Sketch of magnet circuit of MR damper2.1 参数的初步确定(1) 工作间隙g[4]. 在忽略漏磁的情况下,图2中各段的理论磁场强度为其中:Φ 为闭合磁路的磁通量,处处相等;μ0 为真空磁导率;μr i 为各传输介质的相对磁导率;si 为磁路各断面面积;Bi 为各段磁感应强度.要提高MR 阻尼器的阻尼力需要提高磁流变液体工作区域的磁场强度. 环形间隙处断面与其他区域相比,磁通量Φ 相同,断面的面积相差不大而其相对磁导率却小得多,因此整个磁路中间隙处的磁场强度远远大于其它区域,即磁路的磁动势主要集中在间隙处,提高磁感应强度即可提高阻尼器的阻尼力.由于磁流变液的相对磁导率远小于阀芯和阀体,因此较小的环形间隙将有利于产生较大的磁通密度,通常环形间隙值g =0.25 ~2 mm. 本设计中选择g=1 mm.(2) 工作间隙lg 的有效长度:根据文献[4]可确定lg为5 mm.(3) 漏磁系数σ 和磁阻系数f 取值:σ 的下限为2.0,上限为无穷大;f 的取值范围为1.1 ~1.5.根据经验确定σ = 2.2,f = 1.2.2.2 磁路材料的选用材料的选择主要针对阀芯和阀体两部分[5].设计要求阻尼器线圈通以不大电流时可以获得较大的磁场强度,并使磁流变液工作区间( 环形间隙) 处的磁场强度最大,而非工作区间的能量损失最小; 不通电流时,阻尼器内剩磁小,阻尼力能在尽可能短的时间内迅速下降. 因此磁芯应选择磁导率高、矫顽力小、磁饱和度高的材料,考虑到系统要求和成本,磁芯和磁轭选用低碳钢,轴、轴套和端盖材料选用紫铜. 各材料的相对磁导率分别为:低碳钢,μs = 1 000;磁流变液,μMRF =2.5;线圈和紫铜,μcoil = μcopper = 1.2.3 工作点的选择(1) 磁芯工作点的选择. 根据低碳钢的B-H曲线,选择其工作点为B=1.25.(2) 磁流变液体工作点的选择. 磁流变液体的工作点影响其最大阻尼力,因此其值需根据系统所需阻尼力和液体的恢复力模型来确定.2.3.1 计算系统所需最大阻尼力[6]设定系统执行元件的目标位移为xt,阻尼器施加阻尼力FMRF 时的位移为xa,执行元件在该点的运行速度为va. 根据能量守恒有:其中,xt-xa = Δx 为系统控制误差即定位精度.由式(1) 可得设气动伺服系统的定位精度0.1 mm,得到系统在其高速时要精确定位所需的最大阻尼力FMRF 为1000 N.2.3.2 计算磁流变液体的工作点对于流动式阻尼器,当其激磁线圈产生磁场时,环形间隙中的磁流变液体产生屈服剪应力,活塞两端的压差为式中:q 为流过MR 阻尼器环形间隙的MRF 流量;D为磁流变液体的动力粘度.此时阻尼力为其中:q = Av,A 为MR 阻尼器环形间隙的面积,v 为MRF 速度;η 为MRF 的动力粘度.根据已知参数得到磁流变液体所需最大剪应力为τy =40.4 kPa. 本文选用的磁流变液体为哈尔滨工业大学的TiderMRF 27/50,其本构关系为应用广泛的Bingham 模型,该模型表述简单、物理意义明显,对于控制策略还不充分的阻尼器来说,其用于阻尼器的设计,简单且具有一定的精度.根据MRF 的本构关系式中:C1 = 64.72,C2 = 1.63;τy 是MRF 的屈服强度.把τy = 40.4 kPa 代入式(5) ,计算得磁流变液体工作点为B = 0.6 T,即间隙处MRF 磁感应强度为0.6 T.阻尼器产生的阻尼力满足系统要求.2.3.3 阻尼阀结构参数的计算为使环形间隙处的磁场强度达到工作点,并考虑漏磁,磁芯和磁轭处的磁通满足式中:Φ 为磁通量;As、Ag 分别为磁芯和间隙的截面积;Bs、Bg 分别为磁芯和间隙的磁感应强度;σ 为漏磁系数.式中:Hs 和Hg 分别为磁芯和间隙的磁场强度;ls 和lg 分别为磁芯和间隙的总长度;f 为磁阻系数. 而磁感应强度与磁场强度的关系为式中:真空磁导率μ0的值取4π ×10-7 H/m.由式(6) ~(8) 计算得阻尼阀的结构参数为:铜芯直径D1 = 5 mm,阀芯直径Dcore = 12 mm,磁轭直径Din = 28 mm,环形工作间隙g = 1 mm,缸体外径Dout = 40 mm,环形工作间隙长度lg = 5 mm,线圈总长度l = 40 mm,阀芯总长度lcore = 60 mm.2.3.4 阻尼阀安匝数的计算由磁路基尔霍夫定律得式中:N 为线圈匝数;I 为线圈电流;li 为磁路各段的平均长度.由于阀芯、阀体等材料的磁导率要比磁流变液高3 个数量级,式(9) 右端求磁路长度中可只考虑工作间隙中磁流变液材料一项,磁路其它各段可忽略,则式(9) 可近似写为得到阻尼阀的安匝数为424,取为450. 当电流的上限值取为1.5 A 时,阻尼阀线圈的匝数为300.3 磁路的有限元仿真3.1 建立磁路模型阻尼阀为轴对称式结构,则取阻尼阀四分之一的部分采用二维轴对称模型[6].模型中磁流变液、阀芯、线圈、阀体、绝缘体( 线圈与磁流变液间) 材料分别用A1、A2、A3、A4、A5 表示,其相对磁导率分别为:μr( A1) = 2.5,μr( A2) = μr( A3) = μr( A5) = 1,μr( A5) = 1 000模型单元类型选为PLANE53 ( 二维8 节点实体单元) 和远场PLANE110,并指定各材料类型.如上所述得到阻尼阀的模型图( 图3A) ,并根据磁场的分布规律对模型进行网格划分( 图3B) .对模型加载电流,通过后处理获得阻尼阀的磁路磁通量如图4. 磁场大部分落在间隙区,作用于磁流变液体产生的阻尼力可以满足阻尼器的工作要求,表明设计参数合理. 同时可知,环形间隙处磁通密度受到阻尼器阀芯直径、侧翼长度影响较大,尤其对前者的变化更为敏感.图3 磁路网格划分及模型Fig.3 Grids and model of magnet circuit图4 阻尼阀磁路磁场分布图Fig.4 Magnetic field distributing of the damper4 MR 阻尼器的性能测试采用济南试金集团有限公司生产的微机控制万能实验机对磁流变阻尼器进行阻尼力的测试实验,检验阻尼器在不同电流、速度下,磁流变阻尼器的阻尼特性,为MR 阻尼器气动控制系统控制策略的选择提供依据.实验的电流控制在0 ~1.5 A,采用电流递增和递减的方式每隔0.1 A 测量一次,速度分别选用10、20、50、100、200、400 mm/s. 通过实验数据分析,选择低、中、高3 类数据分别进行2次拟合,获得运行速度分别为20、100、400 mm/s时的电流与阻尼力的关系曲线.图5 不同速度下电流与阻尼力的关系曲线Fig.5 Curves of currents to damper forces at different velocity如图5 所示,MR 阻尼器阻尼力随电流强度、活塞速度幅值增加而增加. 开始时,随着电流增大阻尼力增大的幅值较大,当电流增加到1. 0 A左右的时候,磁场随电流增大而逐渐达到饱和,此时阻尼力增加的幅值变小; 无输入电流时,磁流变阻尼器产生的最大阻尼力随速度增加而增加,低速时仅为70 N. 电流I =1 A、速度为20 mm/s时,磁流变阻尼器产生的最大阻尼力为700 N; 速度为400 mm/s 时,磁流变阻尼器产生的最大阻尼力为900 N,基本满足系统需要.5 结论根据理论推导和计算得到各项参数,设计出MR 阻尼器,并进行了有限元磁路仿真和实验检测,从仿真结果和实验数据可知: MR 阻尼器结构紧凑、工作性能良好. 阻尼力的调节范围大,在气动伺服系统中实现了高精度的位置控制.【相关文献】[1]Mark R J. Pneumatic motion control using magnetorheological fluid technology [C]//27th International Symposium on Smart Actuates and Transducers ( ICAT) ,1999.[2]关新春,李金海,欧进萍. 剪切阀式磁流变液减振器磁路的设计方法[J]. 机械设计与制造,2003(3) :97-99.[3] Magnetic Circuit Design. Designing with MR Fluids [Z].California: LORD corp,1999.[4]邓长华,任建亭. 磁流变阻尼器优化设计与性能分析[J]. 机械科学与技术,2002,21 (2) :9-13.[5]Ahmadian M,Pare C A. Quarter car experimental analysis of alternative semiactive control methods [J]. Journal of Intelligent Material System and Structure,2000 (11) :267-612.[6]Li W H,Du H,Guo N Q. Finite element analysis and simulation evaluation of a magnetorheological valve [J]. Advance Manufacturing Technology,2003,21 (3) :438-445.。
磁流变MR阻尼器的磁路设计优化及仿真摘要:磁流变现象应用广泛,其中利用其原理制作而成的磁流变MR阻尼器是一种性能优良的半主动控制装置,其结构简单、响应快、动态范围大、耐久性好,具有很强的可靠性。
要使磁流变MR阻尼器的性能最佳,需要考虑诸多方面的因素,这其中阻尼器的磁路设计尤为关键。
1.MR阻尼器的磁路设计磁流变(MR)阻尼器种类多样,根据MRF在MR阻尼器内受力方式的不同,通常将MR阻尼器按结构型式划分为剪切式MR阻尼器、阀式MR阻尼器、剪切阀式MR阻尼器和挤压式MR阻尼器,剪切阀式综合了阀式和剪切式的双重特点,其综合性能好,易加工制造,且其磁路设计也比较简单。
鉴于此,在本次研究中,我们选用剪切阀式作为本文研究的微型MR阻尼器的结构型式,受力形式和活塞运动方式上,选择双出杆直动型。
当MR阻尼器的励磁线圈有电流通过时,产生的磁场会使缸筒内部的磁流变液状态瞬间发生改变,从而在活塞运动过程中产生阻尼力。
考虑到本次所设计的MR阻尼器尺寸很小,线圈内绕极其困难,不便操作。
因此本文研究的MR阻尼器采用线圈外绕的方法,现详细说明其磁路的设计。
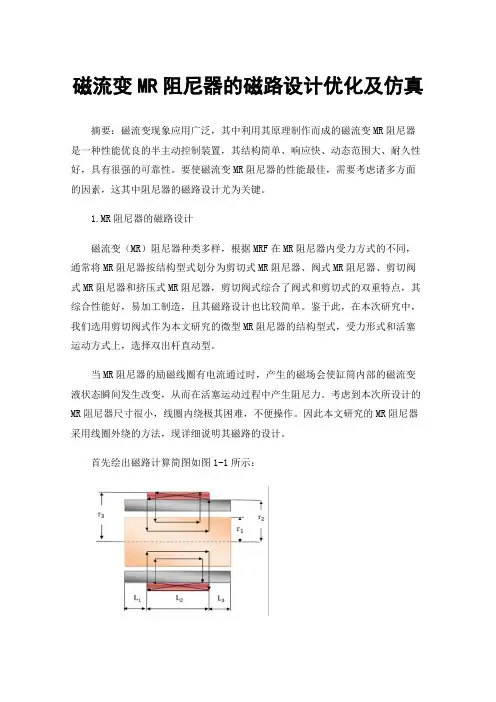
首先绘出磁路计算简图如图1-1所示:图1-1线圈外绕磁路计算简图根据磁路欧姆定律可得:(1-1)式中,N是缠绕在缸筒表面的铜线匝数;I是通过前面铜线的电流;为整个回路的磁通;和h分别为MR阻尼器磁路的平均长度和阻尼间隙;和分别为磁芯和空气的磁导率。
MR阻尼器中心轴段部分的磁阻为:(1-2)侧翼磁阻为:(1-3)MR阻尼器间隙内的磁阻为:(1-4)MR阻尼器缸筒内的磁阻为:(1-5)在式(2-8)到(2-9)中,为磁流变液的相对磁导率,为缸筒材料(即铝合金)的相对磁导率,为活塞杆材料(即硅钢)的相对磁导率。
该阻尼器磁路的总磁阻可表示为:(1-6)根据磁路欧姆定律[3],该MR阻尼器所需要的磁动势为:(1-7)上式中,为MR阻尼器的活塞与缸筒内部的磁感应强度,为该处磁通面积。
河南农业2017年第5期(上)NONG YE ZONG HENG农业纵横作为典型的传统农业大国,我国对拖拉机及其改装车等农用车辆的各项性能高度重视,安全舒适更成为现代车辆座椅设计追求的必要目标。
考虑到拖拉机存在座椅设备简陋、驾驶环境恶劣、田间作业低速、路面不平且路况多变等特殊情况,将新型智能材料——磁流变液应用于拖拉机座椅悬架上,可有效耗散地面激励引起的车辆对驾驶员的振动,改善乘坐舒适性。
磁流变液凭借其响应快、造价低、寿命长、可调范围大等诸多优点而备受人们关注。
磁流变(Magnetorheological Fluids 简称为MRF)阻尼器由于其自身具有的许多优良性能,成为了结构振动控制领域最具有发展前途的减振用磁致伸缩逆效应和磁流变效应把外部负载力的变化转变为磁流变液阻尼通道中磁场的变化,最终输出不同大小的阻尼力,具有负载自适应的特点。
一、超磁致伸缩与磁流变耦合机理GMM是一种新型的功能材料,可以将磁能和机械能进行相互转换,响应速度快。
GMM 逆效应,是指在一定磁场中,给超磁致伸缩材料施加外力作用,其磁化强度发生变化的现象。
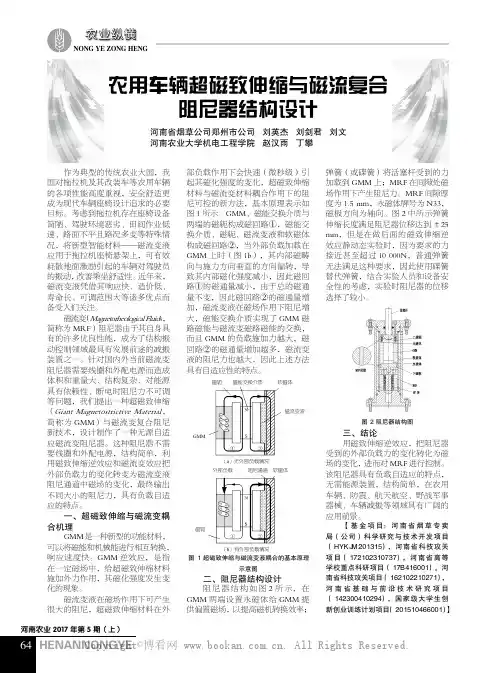
磁流变液在磁场作用下可产生很大的阻尼,超磁致伸缩材料在外GMM 磁二、阻尼器结构设计阻尼器结构如图2所示,在GMM 两端设置永磁体给GMM 提供偏置磁场,以提高磁机转换效率;弹簧(或碟簧)将活塞杆受到的力加载到GMM 上;MRF 在间隙处磁场作用下产生阻尼力。
MRF 间隙厚度为1.5 mm,永磁体牌号为N33,磁极方向为轴向。
图2中所示弹簧伸缩长度满足阻尼器位移达到±25 mm,但是在做后面的磁致伸缩逆效应静动态实验时,因为要求的力接近甚至超过10 000N,普通弹簧无法满足这种要求,因此使用碟簧替代弹簧,结合实验人员和设备安全性的考虑,实验时阻尼器的位移选择了较小。
三、结论用磁致伸缩逆效应,把阻尼器受到的外部负载力的变化转化为磁场的变化,进而对MRF 进行控制。

一种新型复合磁流变阻尼器的设计与磁路仿真分析于国军杜成斌孙立国(河海大学工程力学系,江苏南京 210098)摘要:针对土木工程的特点,从保证磁流变阻尼器的阻尼性能、节省控制系统的能耗和提高阻尼器的安全稳定性能,设计了一种具有比较好的被动和半主动控制功能的新型复合结构磁流变阻尼器。
针对其复合结构,建立了这种磁流变阻尼器的力学模型,根据电磁场理论,设计了同时采用永磁体与通电线圈共同作用下的磁流变阻尼器的磁路,并利用ANSYS软件对磁流变阻尼器磁路与结构参数进行仿真分析,证明了复合结构比传统结构具有更优越的可控性能,为这种复合磁流变阻尼器结构设计和性能分析提供了依据。
关键词:复合磁流变阻尼器永磁体磁路设计有限元分析The Design of A new-style Composite MR Damper and Magnetic AnalysisYU Guo-jun, DU Cheng-bin, Sun Li-guo(Department of Engineering Mechanics, Hohai University, Nanjing 210098, China) Abstract: A new-style composite MR damper for the semi-active control system of civil engineering is designed in the paper. The character of MR damper, the energy consumes of control system and the security & stability of the damper are considered in the research. The new-style of the damper has advantages of passive and semi-active control, and mechanical model is established for the new-style damper. Based on the theory of electromagnetism, MR damper’s magnetic circuit which is in the simultaneous function of permanent magnet and electrifying loop is adopted. The simulation analysis for the magnetic path and structural parameter of MR damper by the ANSYS is carried out. Results show that controllability of composite structure has more predominant than that of traditional structure, and provide the basis of the design of this composite MR damper structure.Keywords: composite MR damper; permanent magnet; magnetic design; FEM analysis1 前言磁流变流体(Magneto-rheological Fluids, MRF)作为智能材料的一种,具有强度高、粘度低、能量需求小、温度稳定性好等特点,在磁场作用下,能够在瞬间从牛顿流体变为剪切屈服应力较高的粘塑性体,且这种转变连续、可逆[1]。
基于磁流变阻尼器的汽车悬架半主动控制系统设计王伟【摘要】为了提高汽车悬架控制的可行性,需要研究对汽车悬架的控制系统.针对使用当前方法对汽车控制系统进行设计时存在能耗高和控制效果差的问题,提出一种基于磁流变阻尼器的汽车悬架半主动控制系统设计方法,通过Bouc-Wen模型描述汽车运动过程中减震器的特性,通过汽车的状态方程和输出方程计算汽车悬架在运动状态下的半主动控制阻尼力,根据计算结果构建汽车1/4运动模型.在汽车1/4运动模型的基础上,对外加磁场进行调节,对汽车的阻尼器进行实时的控制和调节,进而控制汽车的悬架,完成汽车悬架控制系统的设计.实验结果表明,所提方法的能耗低、控制效果好.【期刊名称】《内蒙古民族大学学报(自然科学版)》【年(卷),期】2019(034)001【总页数】6页(P76-81)【关键词】磁流变阻尼器;汽车悬架;控制系统【作者】王伟【作者单位】滁州学院机械与汽车工程学院,安徽滁州 239000【正文语种】中文【中图分类】TP273根据车辆振动控制的方法可以将车辆的悬架控制方法分为三个类型,分别是主动、半主动和被动[1].汽车行驶过程中的稳定性和乘客乘坐的满意度可以通过主动悬架得以优化,但可靠性差、价格高、结构复杂和能耗高都是主动悬架的缺点,以上缺点对主动悬架的发展造成了约束.不能根据道路的情况和汽车运行过程中的状态对调节汽车的悬架是被动悬架系统的缺点,降低了被动悬架控制系统的控制效果[2].半主动悬架与以上两种方式相比,存在价格合理、能耗少和结构清晰的特点,逐渐被使用在汽车悬架的设计中.磁流变液是近几年新发展的一种材料,具有温度稳定性高、强度高、滞回现象少、粘度低的特点,磁流变液还具有引入杂质不敏感的特点,被广泛地应用到制动器、机械、建筑工程等行业阻尼器的制作中[3].将磁流变液作为主材料,得到的阻尼器连续调节、结构简单、阻尼力大、耐性好、响应快,被应用在车辆控制系统的设计中.当前车辆控制系统设计方法存在能耗高和控制效果差的问题,需要对车辆控制系统设计方法进行研究[4].汪若尘等[5]提出了一种汽车混合悬架半主动控制系统设计方法,通过构建汽车的动力学模型,对汽车回路电流在不同模式下的变化进行分析,在控制参考力概念的基础上采用粒子群算法确定半主动控制的最优参数,完成车辆控制系统的设计,该方法对汽车悬架进行控制时,能耗较高.胡红生等[6]提出了一种基于模糊算法的悬架控制系统设计方法,该方法在电磁学原理的基础上构建汽车动力学模型和阻尼器力学特性模型,根据模糊算法规则得到控制策略,通过控制策略完成汽车悬架的控制,该方法对汽车悬架控制时,汽车车身的加速度较高,控制效果差.韩忠磊等[4]提出了一种基于不变性原理的悬架控制系统设计方法,该方法根据阻尼器的运作方式,引入电磁阀和永磁体,对汽车的阻尼器进行设计,在不变性原理的基础上建立汽车悬架模型,得到反馈控制律,根据反馈控制律控制汽车悬架,完成车辆控制系统的设计,该方法存在能耗高的问题.为了解决上述方法中存在的问题,以磁流变液作为主材料,制作阻尼器应用到悬架的控制中,提出一种基于磁流变阻尼器的汽车悬架半主动控制系统设计方法.1 悬架控制系统悬架控制系统主要包括控制软件、磁流变阻尼器、数据采集系统、功率放大器、激振源、传感器、计算机和测控版等[7](图1).模拟悬架机械装置:该装置主要由底座、立柱、轮胎、直线导轨、悬架非簧载质量、悬架弹簧和悬架簧载质量构成,是一种两自由的悬架系统模型,可以在垂直方向模拟1/4汽车悬架系统的振动.功率放大器和磁流变阻尼器:悬架控制系统中的执行元件是阻尼器,在汽车的悬架系统中安装阻尼器,可以得到汽车在运行过程中可以控制的阻尼力.传感检测系统:在运行状态下汽车的悬架系统可以通过传感器检测系统测量得到,传感检测系统主要由激振源内力、位移传感器,加速度、位移传感器构成.悬架控制系统在运行过程中的中心是控制计算机和测控版,运算、处理测量得到的信号,将控制信号传送到执行元件中[8].控制元件:半主动控制系统通过控制软件统一协调元件的工作.例如,处理子程序和数据采集等.振源:激振汽车的悬架系统,通过模拟实际路面在系统中输入状态.数据采集系统:通过采集系统中存在的信号评价测试结果.悬架控制系统的具体工作方式如下:初始化控制系统,并对其进行调试,运行系统的软件以及硬件,使控制系统处于保持运转状态.通过振源对汽车进行激振,采用测控版采样将传感器采集的信号输入数据采集系统和计算机中,根据控制规律对控制信号进行判别,通过测控版将信号传送到各执行元件中,完成悬架的控制[9]. 图1 系统组成图Fig.1 System composition diagram2 阻尼器力学模型和悬架动力学模型在工程界中,非参数和参数建模方法是阻尼器的核心建模方法.其中参数建模包括黏弹塑性模型、非线性双黏性模型、Bouc-Wen模型和非线性滞回双黏性模型等;非参数建模包括Chebychev多项式模型、Takagi-Sugeno模型等.在上述模型中选用Bouc-Wen模型对汽车磁流变减震器的特性进行表述,该模型如图2所示.式中,c代表的是阻尼系数;a为系数,与迟滞回线高度有关;z代表的是粘度系数;x1、x0代表的是位移.图3为1/4汽车悬架模型.图3中,m1代表的是汽车悬架的簧上质量;m2代表的是汽车悬架的簧下质量;k1代表的是汽车悬架中弹簧的刚度;k2代表的是汽车轮胎的刚度;c1代表的是汽车悬架系统的线性黏性尼阻系数.设Fzhi代表的是汽车减震器在运动过程中的阻尼力,其计算公式如下:图2 Bouc-Wen模型Fig.2 Bouc-Wen model图3 悬架模型Fig.3 Suspension model汽车悬架的运动微分方程的表达式如下:式中,x1、x2代表的是阻尼系数、q代表的是路面位移;u代表的是控制向量.通过上式得到汽车悬架的状态向量X和输出向量Y:通过状态向量得到汽车悬架在运动状态下的状态方程,根据输出向量得到汽车悬架在运动状态下的输出方程.状态方程和输出方程的表达式如下:式中,A、B、C、D、L为运动参数,w=q̇.设J表示指标函数,J的表达式如下:式中,a1代表的是轮胎变形;a2代表的是轮动载荷;a3代表的是悬架变形;a4代表的是汽车加速度;Ru2代表的是控制力.通过性能指标函数得到汽车悬架的线性半主动控制阻尼力F,F的计算公式如下:式中,con、coff均为阻尼系数,coff=0.05con.通过汽车悬架的线性半主动控制阻尼力F得到汽车1/4运动模型:式中,q(t)代表的是路面激励.3 半主动控制通过上述分析可知,磁流变阻尼器在汽车运动过程中的阻尼力主要是由2个阻尼力构成,其中的一部分为粘滞阻尼力,与普通流体相似;另一部分是库伦阻尼力,是根据外加磁场生成.因此,可以通过实时调节外加磁场进而实时控制汽车的磁流变阻尼器,不同的磁流变阻尼器的控制力通过对应的控制策略得到.3.1 被动控制策略1该策略是不打开汽车在运动过程中的磁流变阻尼器电源,使磁流变液从运动开始到运动结束一直都是牛顿流体,此时得到最小的汽车阻尼力Fumin(t),即:式中,阻尼系数u(t)的计算公式如下:式中,̇(t)代表的是非悬挂部分在汽车运动过程中的速度;̇(t)代表的是汽车在运动过程中的整体速度.3.2 被动控制策略2该策略是打开汽车运动过程中磁流变阻尼器的电源,将磁场调节到最大值,此时汽车磁流变阻尼器中为Bingham流体,汽车的阻尼力达到最大值Fumax(t),Fumax(t)的计算公式如下:3.3 半主动控制策略通过公式(5)得到汽车悬架的状态方程,引入性能指标函数J,在最优控制理论的基础上得到汽车悬架的最优控制力 (t),(t)的计算公式如下:式中,R表示汽车控制力向量在最优控制力下对应的权矩阵,可以通过权矩阵R 对控制力和汽车悬架系统反映之间的重要程度进行调整.采用Riccati方程求解参数P:式中,S代表的是状态向量的权矩阵,可以通过权矩阵S对控制力和汽车悬架系统反映之间的重要程度进行调整.可以对磁场强度进行调整,改变车辆的阻尼力,汽车的阻尼力不能在较短的时间内变为最优控制力,只有对磁场强度进行调整,使阻尼力不断地趋近最优控制力,在饱和控制理论和最优控制理论基础上得到悬架控制策略Fu(t):4 实验结果与分析为了验证所提方法的整体有效性,需要对所提方法进行测试,本次测试的实验平台为Matlab,分别采用所提方法(方法1)、基于模糊算法的悬架控制系统设计方法(方法2)、基于不变性原理的悬架控制系统设计方法(方法3)进行测试,通过能耗系数n对比3种不同方法控制汽车悬架的能耗,方法1、方法2和方法3的测试结果如图4所示.图4(a)为所提方法的测试结果,由图4(a)可知,采用所提方法进行测试时,在多次迭代中的能耗系数均在3以下,表明采用所提方法对汽车悬架进行控制时的能耗较低;图4(b)为基于模糊算法的悬架控制系统设计方法的测试结果,由图4(b)可知,采用基于模糊算法的悬架控制系统设计方法进行测试时,在多次迭代中能耗系数均在3以上,高达5.4,表明基于模糊算法的悬架控制系统设计方法对汽车悬架进行控制时的能耗较高;图4(c)为基于不变性原理的悬架控制系统设计方法的测试结果,由图4(c)可知,使用基于不变性原理的悬架控制系统设计方法进行测试时,在多次迭代中能耗系数的波动较大,表明基于不变性原理的悬架控制系统设计方法的稳定性较差.对比3种不同方法的测试结果可知,所提方法的能耗系数较低,因为该方法将磁流变阻尼器应用到车辆悬架的控制和设计中,磁流变阻尼器的阻尼力大、耐性好、响应快,降低了控制过程中的能耗,验证所提方法的能耗较低.图4 三种不同方法的能耗系数Fig.4 Energy consumption coefficient of three different methods为了进一步验证所提方法的整体有效性,分别采用所提方法(方法1)、基于模糊算法的悬架控制系统设计方法(方法2)、基于不变性原理的悬架控制系统设计方法(方法3)进行测试,通过车体加速度,对比方法1、方法2和方法3的控制效果,测试结果如图5所示.图5 三种不同方法的车体加速度Fig.5 Car body acceleration with three different methods图5(a)为所提方法的车体加速度,由图5(a)可知,采用所提方法对汽车进行控制时,汽车的车身加速度在-0.05~0.05 m·s-2区间内波动;图5(b)和图5(c)为基于模糊算法的悬架控制系统设计方法和基于不变性原理的悬架控制系统设计方法的车体加速度,由图5(b)和图5(c)可知,采用基于模糊算法的悬架控制系统设计方法、基于不变性原理的悬架控制系统设计方法对汽车进行控制时,汽车车身加速度在-0.05~0.05 m·s-2区间外波动,对比3种不同方法的测试结果可知,所提方法对汽车控制时的加速度衰减较为明显,因为所提方法通过调整磁场强度,改变车辆运行过程中阻尼器产生的阻尼力,使汽车运行过程中阻尼器产生的阻尼力不断趋近于车辆悬架的最优控制力,衰减车辆车身在运动过程中产生的加速度,提高所提方法的控制效果.5 结束语汽车悬架受轮胎状况、车身载荷和路面激扰等因素的影响,是一个多自由度的振动系统,控制汽车悬架可以保证乘客的舒适度,减少振动.当前悬架控制系统设计方法存在能耗高和控制效果差的问题,提出一种基于磁流变阻尼器的汽车悬架半主动控制系统设计方法,将磁流变阻尼器应用到悬架控制中,降低了能耗,衰减了车身的加速度,解决了当前方法中存在的问题,被广泛应用到汽车悬架的控制中.参考文献【相关文献】[1]张丽萍,弓栋梁.时域硬约束下汽车主动悬架-H2/H∞保性能控制[J].计算机仿真,2017,34(8):190-196.[2]高振刚,陈无畏,汪洪波,等.基于故障补偿的汽车半主动悬架容错控制[J].汽车工程,2016,38(6):705-715.[3]陈士安,王骏骋,姚明.车辆半主动悬架全息最优滑模控制器设计方法[J].交通运输工程学报,2016,16(3):72-83,99.[4]韩忠磊,胡三宝,刘继鹏.基于不变性原理解耦的半主动悬架控制仿真研究[J].武汉理工大学学报(交通科学与工程版),2017,41(5):828-832.[5]汪若尘,焦宇,钱金刚,等.混合悬架半主动控制器设计与试验[J].农业机械学报,2017,48(6):334-340.[6]胡红生,肖平,江民,等.野草入侵模糊算法的半主动空气悬架研究[J].传感技术学报,2017,30(10):1497-1503.[7]陈龙,施德华,汪若尘,等.基于混合控制策略的馈能悬架半主动控制[J].北京理工大学学报,2016,36(3):252-257.[8]康耀东,庞辉,刘凯,等.多级可调阻尼半主动空气悬架的天棚控制研究[J].机械科学与技术,2016,35(5):778-783.[9]陈士安,祖广浩,姚明,等.磁流变半主动悬架的泰勒级数-LQG时滞补偿控制方法[J].振动与冲击,2017,36(8):190-196,243.。
新型磁流变阻尼器结构及原理阅读心得一、摘要本文介绍了一种新型磁流变阻尼器(MRD)的结构和原理,以及其在结构控制与减振方面的优势。
通过引入磁流变液(MRF),实现了阻尼器的力学性能在磁场作用下可控,为振动控制和阻尼提供了新思路。
文章首先概述了磁流变液的基本特性,然后详细阐述了MRD的工作原理、结构设计和性能优化方法。
通过仿真分析和实验验证了该阻尼器的有效性和实用性。
振动控制与阻尼技术在工程领域具有广泛的应用价值,如机器人、汽车、建筑等。
传统的阻尼方法往往存在能耗大、适应性差等问题。
研究新型、高效的阻尼器具有重要意义。
磁流变阻尼器(MRD)作为一种新型的阻尼器,因其优异的力学性能和可控性,在振动控制领域受到了广泛关注。
磁流变液(MRF)是一种智能材料,其力学性能受磁场影响显著。
在无磁场作用下,MRF表现为粘塑性流体;当施加磁场时,其粘度迅速增加,表现出类似固体的性质。
这种性质使得MRF在磁场作用下可实现快速、可逆的力学响应,为阻尼器提供了良好的性能基础。
结构设计:本文提出的MRD主要由磁场发生器、磁流变液、阻尼器结构和连接件组成。
磁场发生器负责产生磁场,磁流变液作为工作介质,阻尼器结构承担承载和传递力的作用,连接件确保各部件之间的稳定连接。
工作原理:当磁场发生器产生磁场时,磁流变液中的磁矩受到磁场力的作用,使其排列方向趋于一致,从而增加体系的粘度。
阻尼器内的阻尼力与振动速度成正比,实现对振动的控制。
通过调整磁场强度,可实现阻尼力在很大范围内连续可调,满足不同振动控制需求。
为了提高MRD的性能,本文对磁流变液的性能优化、阻尼器结构设计和连接件优化等方面进行了深入研究。
通过仿真分析,得到了MRD在磁场强度、阻尼器结构和连接件尺寸等参数变化时的力学性能变化规律,为实际应用提供了重要依据。
为了验证MRD的实际效果,本文进行了实验研究。
实验结果表明,该阻尼器在磁场作用下能够实现对振动的有效控制,且性能优越。
磁流变阻尼器设计及汽车平顺性分析开题报告拟解决的问题磁流变式汽车减振器的设计一、课题研究现状、选题目的和意义1()课题研究现状磁流变阻尼器因其具有结构简单、控制方便、响应速度快、消耗功率小、抗污染能力强和输出力大、阻尼力连续可调等优点,它利用了磁流变液在磁场作用下能在毫秒级的时间内从牛顿流体转变成具有一定屈服强度的黏塑性体的智能特性,仅需要很小的能量输入就能产生较大的阻尼力,尤其适合在土木结构的抗风抗震中应用。
在汽车、机械、土木建筑等的振动领域得到了广泛的应用和发展。
现有的磁流变阻尼器的工作模式有阀式、剪切式、挤压式、剪切阀式。
磁流变阻尼器已成为汽车半主动悬架系统中的研究热点。
近几年,对于磁流变阻尼器研究主要关于两个方面,对磁流变阻尼器优化方面的研究和对磁流变阻尼器控制策略的研究。
对于磁流变阻尼器研究关于优化方面的内容主要集中于结构参数的优化以及磁路优化等方面。
现在就这两方面内容对其进行介绍。
1)磁流变阻尼器结构参数优化为了提高磁流变阻尼器的可调范围和可控力值,需要对磁流变阻尼器的结构参数进行优化,以使其阻尼性能达到最佳。
在早期的磁流变阻尼器的研究中,主要对单一目标函数进行优化,以得到最佳的结构关键尺寸,如间隙大小,有效长度及线圈匝数等。
西北工业大学的邓长华等人对双出杆磁流变阻尼器结构参数进行优化,其仅选择可调范围作为目标函数,利用MATLAB优化出线圈匝数、阻尼通道厚度以及阻尼通道长度。
Bingham西安交通大学的吴龙等人从磁流变阻尼器设计原理入手,采用轴对称理论模型对小型单出杆式磁流变阻尼器进行了结构参数的优化研究。
其选取推导出的有效长度公式为目标函数,利用MATLAB优化工具箱进行优化,确定相关参数值代回原阻尼力及可调范围公式反复比对,已达到最佳效果。
对于阻尼力或可调范围的这种单目标优化,涉及到的设计参数比较少,在计算过程上仅从磁学角度考虑结构参数对阻尼力的影响,优化的效果上讲,具有一定的局限性。
汽车磁流变阻尼器的结构设计Structure design of AutomobileMagneto-rheological Damper摘要磁流变阻尼器是一种以新型的智能材料磁流变体作为阻尼器的工作液,并在阻尼器的活塞轴上缠绕电磁线圈,线圈产生的磁场作用于磁流变液,通过控制电磁线圈电流的大小来改变磁流变体的粘度,达到阻尼力可调要求的装置。
磁流变阻尼器作为优秀的半主动控制器件, 具有结构简单、体积小、能耗低、响应速度快、阻尼力连续可调、易于与计算机控制相结合等优点。
目前,磁流变阻尼器已被广泛运用于各种场合的振动控制,汽车磁流变阻尼器也已被广泛研究和应用。
本文在研究了磁流变液材料的组成、磁流变液效应及其主要特征、磁流变液的主要性能的基础上,根据阻尼力的要求和机械设计基本理论,确立了磁流变阻尼器的基本结构参数尺寸及主要部件材料的选用,并以此为基础进行了磁路设计,得出了活塞的磁路结构。
在机械设计基本理论的指导下,计算得出磁流变阻尼器的结构参尺寸数,并应用AutoCAD及UG制图软件,画出汽车磁流变阻尼器的装配图,建立磁流变阻尼器的三维立体模型,分析影响磁流变阻尼器工作性能的主要因素。
【关键词】磁流变阻尼器;磁流变液;磁路设计;AutoCAD;UGAbstractMagneto-rheological damper is a damper that using a variant of magnetic flow material as the working fluid damper, and the piston axis in damper on magnetic coil winding, coils in the field of MRF, through controlling the size of the magnetic coil currents to change the viscosity of the magnetic fluid variant, damping adjustable requirements. MR damper as excellent semi-active control device, it has simple structure, small volume, low energy consumption, fast response and damping force of continuous adjustable, easy and combining computer control etc. At present, MR damper has been widely used in various occasions.The main research of the paper are that introduces MR fluid material composition, MR fluid effect and the main characteristics of MRF. According to the requirements of the damping force and the basic theory of mechanical design, to establish the basic structure size of the MR damper and main material selection of parts. To calculation the size of the structure, draw AutoCAD drawings of MR damper automobile assembly. Using UG software, establish 3d modeling of MR damper. Analysis on the main factors of MR effect.【Key words 】MR damper;Magneto-rheological(MR)fluids;magnetic circuit design;AutoCAD;UG目录摘要 (Ⅰ)Abstract (Ⅱ)前言 (1)第一章概论 (2)1.1引言 (2)1.2 国内外研究现状 (2)1.3汽车减振器的技术简介 (4)1.4汽车磁流变阻尼器发展现状 (7)1.5研究的意义与主要内容 (9)第二章磁流变液材料及其性能 (10)2.1磁流变液的组成 (10)2.1.1磁性颗粒 (10)2.1.2基础液 (10)2.1.3添加剂 (11)2.2磁流变效应及其主要特征 (12)2.3磁流变液的主要性能 (13)2.4本章小结 (16)第三章汽车磁流变阻尼器的设计 (17)3.1阻尼器的基本结构参数尺寸选择 (17)3.2磁路设计 (17)3.2.1磁路设计步骤 (18)3.2.2磁芯材料的特性分析 (18)3.2.3磁性材料的选择 (20)3.3阻尼器零件结构参数 (23)3.4磁流变阻尼器立体建模 (27)3.5影响磁流变阻尼器工作性能的主要因素 (30)3.6本章小结 (33)第四章结论与展望 (34)4.1结论 (34)4.2工作展望 (34)参考文献 (35)谢辞 (36)前言车辆悬架系统的主要功能之一是提供支撑、有效地隔离路面引起的振动和冲击。
1 引言1.1本课题研究背景随着经济社会的发展,汽车已逐步走入普通家庭,成为人们生活和出行必不可少的工具,人们对汽车的安全舒适性能也提出了更高的要求。
汽车行驶时,由于路面不平及发动机、传动系、车轮等旋转部件激发汽车的振动,这些振动直接影响到汽车的乘坐舒适性、操纵稳定性和可靠性。
而传统的被动悬架所采用的减振器由于其自身的局限性无法满足上述要求。
磁流变阻尼器是一种在磁场作用下阻尼可控的器件,与传统汽车悬架系统相比,装有磁流变阻尼器的半主动悬架系统可以根据路面状况和车辆运行状态,在计算机的控制下自动调节阻尼力的阻尼器,大大提高汽车的舒适性和行车安全性。
磁流变阻尼器的工作原理是改变励磁线圈中的电流从而获得不同强度的磁场,使工作腔中的磁流变液的流动特性发生变化,从而改变阻尼力的大小。
因此,控制器只要能实时精确调节磁流变阻尼器的驱动电流,就能达到控制磁流变阻尼器的目的[1]。
随着汽车结构和功能的不断改进和完善,研究汽车振动,设计新型电控系统从而将汽车振动控制到最低水平已经成为提高现代汽车品质的重要措施。
研究性能可靠,调节方便的可调阻尼减振器将是半主动悬架走向大众的必经之路。
1.2汽车悬架系统简介悬架是连接车身和车轮之间全部零部件的总称,是减少动载荷引起的零部件损坏、提高车辆平顺性(乘座舒适性)和安全性(操纵稳定性)的关键(平顺性和操纵稳定性是汽车的最重要的性能指标之一)。
悬架系统主要由弹性元件(如钢板弹簧、螺旋弹簧、扭杆等)、减振器和导向机构组成。
悬架系统中减振器的主要作用是提供阻尼力,加速车架与车身振动的衰减,从而改善车辆行驶平顺性。
按照系统组成有无控制环节,车辆悬架系统可粗略分为被动悬架系统和智能悬架系统,智能悬架根据作用原理又可以粗分为主动悬架和半主动悬架两类。
目前汽车上普遍采用的被动悬架其参数足以对车辆乘座舒适性和操纵稳定性要求的折衷设计,采用保守弹性元件(弹簧)和耗能元件(减振器),弹簧刚度和减振器阻尼系数等参数同定,减振器的阻尼力不可调,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,优点是结构简单,成本低;缺点是缺乏灵活性,一旦设计定型,悬架参数就无法调解了,所以采用被动悬架的车辆的减振效果只能是在特定路况和车况下才能达到最优,难以满足要求越来越高的平顺行和操纵稳定性的要求[2]。
新型车用磁流变阻尼器设计过啸鸿;王昊【摘要】基于磁流变液的混合运动模式和双极线圈分布,从结构类型、元件材料、零件连接、工程应用等多角度考虑,设计出一种结构合理、性能优良、零部件较少并适合于加工的新型车用磁流变阻尼器.【期刊名称】《上海电力学院学报》【年(卷),期】2010(026)001【总页数】4页(P83-86)【关键词】磁流变阻尼器;减振器;结构设计【作者】过啸鸿;王昊【作者单位】上海电力学院,能源与环境工程学院,上海200090;上海电力学院,能源与环境工程学院,上海200090【正文语种】中文【中图分类】U463.33;O37320世纪80年代中后期,磁流变液流体剪切屈服强度过低的瓶颈被突破之后,以磁流变液作为工作介质的器件研究被迅速应用到汽车、机械、土木工程、航空航天等领域的减振上.磁流变阻尼器成为振动控制的新一代高性能减振器,目前应用最广泛的是在汽车领域与军事领域,它在智能结构领域上的广阔应用前景受到了各个国家的普遍关注,成为目前国际上研究的热门课题之一,在国内也逐步受到重视.目前,磁流变阻尼器理论设计大多数都是基于Bingham模型的平板结构模型,现有的大多数磁流变阻尼器存在以下不足:磁力线并不是完全依照有效磁路行进的,由于缸体的导磁作用,磁力线会沿着缸体向外及侧面漏磁,且使缸体带有磁性,导致缸体可能与外部导磁零部件产生干扰,从而影响工作性能等,而在机械结构上也存在整体结构不够紧凑、零件外型过于复杂、成本过高,以及难以大批量生产等问题,使得车用磁流变阻尼器无法推广.因此,开发设计出一种新型的车用磁流变阻尼器,对提高我国汽车产品的技术含量和市场竞争力都具有重要的意义[1].1 磁流变阻尼器的设计准则由于磁流变液和磁流变阻尼器的特殊性,在设计磁流变阻尼器之前,首先要明确磁流变阻尼器的设计准则,主要包括以下两个方面[2,3].(1)磁路设计准则在外加磁场作用下,磁流变液中的可磁化微粒沿着磁场方向排列成链状结构或其他复杂结构,从而改变流变特性,在垂直于磁场方向的流动特性变化最大.因此,在设计磁流变阻尼器时应使阻尼通道中的磁流变液流动方向垂直于磁场方向,以便充分利用磁流变效应来改变磁流变阻尼器的阻尼力.(2)机械部分设计准则磁流变阻尼器的结构除了必须满足必要的连接强度外,还要尽可能地保持良好的密封性,同时外形和行程必须满足现用车辆阻尼器的尺寸规格要求.在保证机构顺利运动的前提下,要尽可能简化磁流变阻尼器的机械结构及加工工艺过程,并降低加工成本.2 磁流变阻尼器结构方案的确定在明确设计准则后,首先需要确定磁流变阻尼器的基础结构.由于车用阻尼器对阻尼器自身的形状、规格、尺寸都有一定的要求,故对磁流变阻尼器的基础结构进行大幅更改的可能性不大.因此,在磁流变阻尼器的工作模式与结构类型方面,应选择目前磁流变阻尼器中较为优秀、可行性较高的设计方案作为本设计中的基础结构方案.2.1 工作模式的选择根据磁流变液在阻尼器中的受力状态和流动形式的不同,其工作模式可以分为流动模式、剪切模式、挤压模式,以及这3种模式的组合.在设计磁流变阻尼器时,应使阻尼通道中磁流变液的流动方向垂直于磁场方向,以便充分利用磁流变效应来改变磁流变阻尼器的阻尼力.由于汽车悬架阻尼器的行程较大,且在结构尺寸和结构强度上有严格要求,因而车用磁流变阻尼器很少采用挤压模式,而多采用流动和剪切相结合的混合模式.根据汽车阻尼器的工作原理和结构特点,本方案选用基于剪切模式和流动模式共同作用,即混合工作模式的双阻尼通道串联的磁流变阻尼器,其工作原理如图1所示.由图1可知,构成该标准磁流变阻尼器的基本构件有:活塞;活塞杆;电磁线圈;工作缸等.电磁线圈绕制在活塞上,通过活塞杆引出电源线.阻尼器内腔充满了磁流变液,活塞在工作缸内作往复直线运动,活塞与缸体发生相对运动,并挤压磁流变液迫使其流过缸体与活塞间的间隙,此时无磁场力作用,磁流变液以牛顿流体作粘性流运动,符合牛顿流体的本构关系;当电流通过线圈,产生磁场后,磁流变液就会瞬间由牛顿流体转变为粘塑体,粘度呈数量级提高,流体的流动阻力增加,表现为具有一定屈服应力的类似于固体的本构关系.图1 基于混合模式磁流变阻尼器工作原理在这个过程中,阻尼通道的磁场越强,所产生的阻尼力越大.因此,磁流变液在阻尼通道中产生的阻尼力是随着阻尼通道中磁场强度变化而变化的,即可以通过调整电流来完成对阻尼力大小的控制.2.2 活塞线圈结构的选择传统磁流变阻尼器通常采用的都是单级线圈活塞式结构,这种结构便于加工,非常适合流水线生产.但随着磁流变阻尼器应用的推广,对磁流变阻尼器性能的要求自然也越来越严格.结构紧凑、高表现的阻尼性能是对现在磁流变阻尼器设计的一大要求,传统单级线圈的电流-阻尼特性已经难以满足现代汽车对阻尼器的要求.目前,在磁流变阻尼器设计方案中,较为热门的是双级线圈活塞式结构,在同等电流条件下,其最大阻尼力是单级线圈的1.44倍.因此,在活塞线圈结构的方案上,本文选择双级线圈作为活塞线圈结构的基础方案.2.3 磁流变阻尼器的组装结构磁流变阻尼器可根据活塞杆和缸体的匹配分为单杆单筒、单杆双筒和双杆单筒3种形式,这也是目前大多数磁流变阻尼器设计所采用的结构形式.鉴于汽车阻尼器的形状规格要求,必须舍弃磁流变阻尼器中的体积补偿器,使得阻尼器能节省更多的悬架空间,因此本文所设计的磁流变阻尼器采用单杆双筒式的组装结构.这种阻尼器外型流畅,密封效果好,但是制作工艺复杂,加工成本较高,大多应用在大型机械或者高档的轿车中.具体结构如图2所示.图2 磁流变阻尼器组装结构3 磁流变阻尼器结构的优化方案磁流变阻尼器的机械结构部分改动限制较小,同时优化该部分能延长磁流变阻尼器的使用寿命.磁流变阻尼器设计的核心在于优化配置,降低成本,简化工艺过程及美化结构外形.本文在文献[4]的基础上,结合连接密封的3个主要问题,提出了磁流变阻尼器结构的优化方案.3.1 磁流变阻尼器内部导线走向磁流变阻尼器的运作需要持续供应的磁场,这也就意味着必须将通电的导线从外部引入到磁流变阻尼器的缸体中,并在活塞处绕成线圈,再从缸体内引出接上负极形成回路.由于磁流变阻尼器的工作缸在运作时是一个完全密闭的环境,要从外部引入导线,从缸体着手很难实现.因此,选择活塞杆,从活塞杆的底部钻出大小合适的通孔,让导线穿过活塞杆进入活塞内部,在活塞处绕成线圈后沿原路返回接回电源.但按照这一设计思路进行设计会碰到以下问题:一是从活塞杆钻孔到活塞,这种过长的钻削会带来加工上的困难;二是在这么狭长的内部通道中将导线顺利地引入和引出很难实现;三是由于设计的磁流变阻尼器属于双级线圈活塞式结构,如何完成两个线圈的连接也是一大难题.本设计则通过拆离活塞与活塞杆,同时对活塞线圈进行“凹”字型钻孔设计解决了以上问题:一是将活塞杆和活塞分离,不再采用塞杆一体化的设计,而是分成通过管螺纹可彼此紧密连接的两个部分,从结构上缩短通孔的加工长度;二是在活塞杆的两端以及活塞的左端,也就是导线通过的关键部分,用钻孔的方式做出既可以容纳多余导线,又方便导线引入引出的扩孔;三是在活塞部分配合双级线圈的结构,用钻孔的方式做出“凹”字形的引线孔路,使得导线能顺利地从一个线圈引到另一个线圈.这样的设计还避免了导线的非工作部分产生的磁通影响工作区域的磁通线,减少漏磁和磁涡的产生,提高了磁流变阻尼器的工作效率和电控准确性.3.2 磁流变阻尼器底阀的设计磁流变阻尼器的底阀是设计过程中的最大难点.底阀是单杆双筒型磁流变阻尼器特有的重要元件之一,其作用是控制内筒和外筒之间磁流变液流动,是连接内筒与外筒的主要关卡.在阻尼器运动过程中,由于活塞杆进出内筒会带来一定的体积差,磁流变液会经过底阀来完成工作缸与储存缸之间的移动,从而弥补这一体积差.为了使双筒磁流变阻尼器能够正常运作,底阀必须承受存在于活塞运动时内筒与外筒之间的压力差,必须在磁流变液流经时保证完全畅通,这样才能尽可能减少液体流动时的阻力.底阀如果不能时常保持畅通,磁流变液内的铁质颗粒就会在这个位置发生沉降,从而影响磁流变阻尼器的正常工作.传统的底阀是通过特殊的沟回式凹槽来控制两筒之间磁流变液的流动,但这不足以改善回流不足这一弊病,同时,过于复杂的底阀结构也是磁流变阻尼器制造成本居高不下的原因之一.本文提出的浮环分离结构,将底阀的回流作用分散到位于内外筒间隙的浮环上,将底阀的结构彻底简化,同时加装缓冲弹簧来避免阻尼器失效状态下底阀与活塞硬性冲撞造成的损坏.浮环模型如图3所示.浮环的工作位置处于磁流变阻尼器内筒和外筒之间,由于内外筒壁面光滑度较高,在一定公差等级的限制下,可以保证浮环在内筒和外筒之间顺畅滑动的同时又带有较好的密封性.浮环的工作原理是利用重力让磁流变液从外筒压进内筒,鉴于磁流变阻尼器在实际工作时始终保持垂直于水平面的状态,在活塞杆伸入内筒时,由于体积差的变化,部分磁流变液由内筒经过底阀进入外筒,浮环在压力作用下被顶起,让出外筒的空余容积,用于储存进入外筒的磁流变液;而在活塞杆恢复初始状态后,浮环就会在重力作用下将内筒内的磁流变液压回内筒,补足内筒磁流变液的体积.底阀的剖面如图4所示.图3 浮环模型示意图4 底阀剖面示意浮环材料采用青铜,这样不仅能和内筒和外筒的钢质结构形成减磨性能良好的滑动摩擦副,也避免了因浮环的磁化而影响磁流变阻尼器的正常工作.为了保证浮环和内外筒的良好配合,也为了让浮环能很好地定位,在浮环和外筒上采用了彼此匹配的契合设计.同时,在浮环和磁流变液接触的部分,设计了橡胶质的浮环密封圈,使得密封更为彻底,也保护了浮环不被磁流变液浸泡腐蚀.该装置的原理和结构都非常简单,实现起来也相当容易,它不仅很好地实现了磁流变液的顺流、回流,更保证了外筒和端盖之间的良好密封性.3.3 零件连接与密封性的优化完成了零件的结构以及尺寸设计后,如何将零件连接并组装起来,选择更为合理的零件连接方式是结构设计不可或缺的重要一环.本文选择磁流变阻尼器组装结构中最重要的关键点,即内筒与端盖处的连接密封作为主要优化对象.考虑到整个磁流变阻尼器中内筒是和活塞接触最多、也是容纳最多磁流变液的零件,这也就意味着端盖与内筒间的连接处将是承受整个悬架阻尼运动最大应力的部分.因此,在设计端盖与内筒的连接时,首先要考虑的是该连接处应具备较大的连接强度.本设计在端盖与内筒之间采取管螺纹的连接方式,内筒端口外壁部分采用9mm×1 mm的凸缘设计,与端盖内壁攻出相配合的螺纹结构.危险截面的拉伸强度为:本文引用奥迪A6的实际数据进行计算,得出σca=131.42 MPa,而查阅机械制造手册可得,采用20#低碳钢为材料的管螺纹,其允许疲劳极限为200~280.由此可知,用管螺纹结构进行连接是可行且安全可靠的.在进行端盖内部的结构设计时,设计了可以正好容纳一个塑胶弹性密封圈的内部凹槽,这个凹槽不仅能容纳密封圈,更能在进行螺纹加工时起到退刀槽的作用.将密封圈塞入凹槽后,活塞杆在进出内筒的过程中就必须通过密封圈,紧密的公差配合尺寸使得活塞杆在运动时密封圈能将附着在活塞杆上的磁流变液阻挡回内筒,从而起到了良好的密封效果.密封圈的材料为工业塑料聚甲醛,这种塑胶质的密封圈不仅对液体的密封效果较强,而且具有很强的弹性,在内筒螺纹扣紧时,该密封圈可以提供一定的预紧力,使得管螺纹自锁,杜绝了内筒松脱的可能.密封圈的结构见图5.图5 端盖密封与连接4 结束语本文的设计经历了从模糊概念到实际加工成产品的过程.通过这次设计,不仅希望能够为国内磁流变阻尼器的研发贡献力量,也希望磁流变设备能够获得国内更多科研机关的重视,将磁流变阻尼器这一智能化半主动阻尼设备运用到更多、更宽广的领域中.参考文献:【相关文献】[1]张登友,鲁嘉,唐龙,等.磁流变阻尼器的研究及应用现状[J].中国仪器仪表,2007,(10):29-32.[2]廖昌荣,陈伟民,余淼,等.汽车磁流变减震器的设计准则探讨[J].中国机械工程,2002,13(6):723-727.[3]廖昌荣,余淼,杨建春,等.汽车磁流变减震器设计中值得注意的若干技术问题[J].汽车技术,2001,(5):10-14.[4]GAVIN Henri,HOAGG Jesse.Optimal design of MR damper[C]//Proceeding U S-Japan Workshop on Smart Structures for Improved Seismic Performance in Urban Regions,2001,(1):225-236.。