【CN109698899A】一种双模式机器视觉镜头以及控制方法【专利】
- 格式:pdf
- 大小:280.17 KB
- 文档页数:6
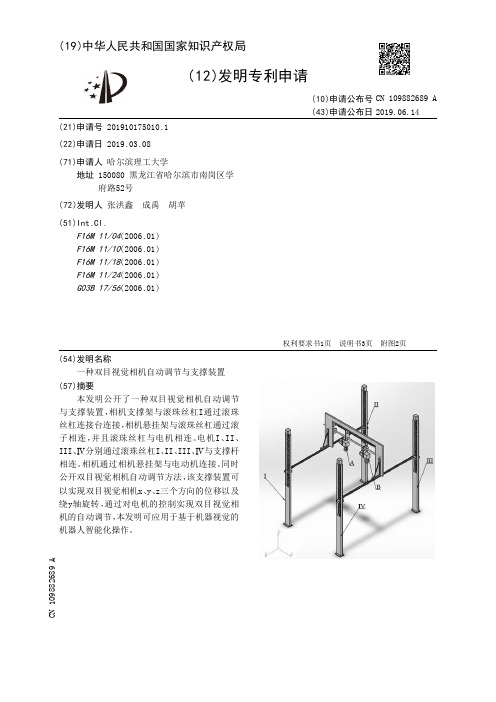
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910175010.1(22)申请日 2019.03.08(71)申请人 哈尔滨理工大学地址 150080 黑龙江省哈尔滨市南岗区学府路52号(72)发明人 张洪鑫 成禹 胡苹 (51)Int.Cl.F16M 11/04(2006.01)F16M 11/10(2006.01)F16M 11/18(2006.01)F16M 11/24(2006.01)G03B 17/56(2006.01)(54)发明名称一种双目视觉相机自动调节与支撑装置(57)摘要本发明公开了一种双目视觉相机自动调节与支撑装置,相机支撑架与滚珠丝杠I通过滚珠丝杠连接台连接,相机悬挂架与滚珠丝杠通过滚子相连,并且滚珠丝杠与电机相连。
电机I、II、III、Ⅳ分别通过滚珠丝杠I、II、III、Ⅳ与支撑杆相连。
相机通过相机悬挂架与电动机连接。
同时公开双目视觉相机自动调节方法,该支撑装置可以实现双目视觉相机x、y、z三个方向的位移以及绕y轴旋转,通过对电机的控制实现双目视觉相机的自动调节,本发明可应用于基于机器视觉的机器人智能化操作。
权利要求书1页 说明书3页 附图2页CN 109882689 A 2019.06.14C N 109882689A权 利 要 求 书1/1页CN 109882689 A1.一种双目视觉相机自动调节与支撑装置,其特征在于:包括支撑杆装置和相机支撑装置;所述支撑杆装置包括4个支撑杆与2个滑轨;所述支撑杆I、 II、III、Ⅳ分别通过滚珠丝杠(1)、(2)、(3)、(4)与电机(5)、(6)、(7)、(8)连接,所述支撑杆I、 II通过夹紧螺母(9)、(10)与滑轨(13)连接,所述支撑杆III、Ⅳ通过夹紧螺母(11)、(12)与滑轨(14)相连;所述相机支撑装置,其特征在于:相机支撑架上分别固定三脚架(15)、(16),所述三脚架(15)通过滑槽(17)与滑轨(13)连接,所述三脚架(16)通过滑槽(18)与滑轨(14)连接;所述相机支撑架上固定有光杆(19)和滚珠丝杠(20),相机A和相机B分别固定在相机悬挂架(21)和相机悬挂架(22)上,所述相机悬挂架(22)套在光杆上,所述相机悬挂架(21)通过滚子(23)与滚珠丝杠(20)连接;电机(24)与所述滚珠丝杠(20)连接,电机(25)通过相机悬挂架(21)与相机A 连接,电机(26)通过相机悬挂架(22)与相机B连接。
![一种镜头控制系统及方法[发明专利]](https://img.taocdn.com/s1/m/c59891e1581b6bd97e19ea5e.png)
专利名称:一种镜头控制系统及方法
专利类型:发明专利
发明人:张甫恺,崔明,张维达,王芳,王晓奎申请号:CN201811487927.7
申请日:20181206
公开号:CN109633852A
公开日:
20190416
专利内容由知识产权出版社提供
摘要:本发明提供一种镜头控制系统及方法,处理光电跟踪设备的光学镜筒内部各数据及控制信息,并通过光纤对外交互,使得镜筒对外只需要光纤及电源线,使得系统配线简单易于维护,并且由于光纤的通信容量大,在光纤中添加状态监控信息,使得机上镜筒内部信息的故障诊断及状态监控简单方便。
申请人:中国科学院长春光学精密机械与物理研究所
地址:130033 吉林省长春市经济技术开发区东南湖大路3888号
国籍:CN
代理机构:深圳市科进知识产权代理事务所(普通合伙)
代理人:曹卫良
更多信息请下载全文后查看。
![一种双摄像头拍照控制方法、拍照控制装置及终端[发明专利]](https://img.taocdn.com/s1/m/f967e03f28ea81c759f578c8.png)
专利名称:一种双摄像头拍照控制方法、拍照控制装置及终端专利类型:发明专利
发明人:王璇
申请号:CN201610796908.7
申请日:20160831
公开号:CN106254780A
公开日:
20161221
专利内容由知识产权出版社提供
摘要:本发明公开一种双摄像头拍照控制方法、拍照控制装置及终端,涉及拍照技术领域,以提高拍照质量。
所述双摄像头拍照控制方法包括:控制标准焦距摄像头对目标区域的目标物进行拍照,得到第一图像,以及控制广角焦距摄像头对目标区域进行拍照,得到第二图像;融合第一图像和第二图像,得到输出图像。
所述双摄像头拍照控制装置包括上述双摄像头拍照控制方法。
所述终端包括上述双摄像头拍照控制装置。
本发明提供的双摄像头拍照控制方法用于提高拍照质量。
申请人:宇龙计算机通信科技(深圳)有限公司
地址:518057 广东省深圳市南山区高新技术产业园(北区)梦溪道2号酷派信息港(1号楼)
国籍:CN
代理机构:北京中博世达专利商标代理有限公司
代理人:申健
更多信息请下载全文后查看。
![一种双摄像头二维扫描装置及控制方法[发明专利]](https://img.taocdn.com/s1/m/9d72b8d6b90d6c85ed3ac64e.png)
专利名称:一种双摄像头二维扫描装置及控制方法专利类型:发明专利
发明人:张涛
申请号:CN201910881376.0
申请日:20190918
公开号:CN110557517A
公开日:
20191210
专利内容由知识产权出版社提供
摘要:本发明公开了一种双摄像头二维扫描装置,属于二维扫描技术领域,主要解决的是现有二维扫描设备在扫描角度偏大时会出现扫描景深偏近的技术问题,所述装置包括壳体,所述壳体内分别设有第一摄像头、第二摄像头以及电连接所述第一摄像头、第二摄像头的MCU,所述第一摄像头的广角大于所述第二摄像头的广角,所述第一摄像头的景深小于所述第二摄像头的景深,所述壳体的同一侧壁设有分别与所述第一摄像头、第二摄像头位置对应的第一开孔、第二开孔。
本发明还公开了一种双摄像头二维扫描控制方法。
本发明扫描角度大且扫描景深远。
申请人:广州讯宝电子科技有限公司
地址:511300 广东省广州市增城区荔城街罗岗工业园(厂房)自编C幢
国籍:CN
代理机构:广州海心联合专利代理事务所(普通合伙)
更多信息请下载全文后查看。
![一种双镜头立体视觉系统优化方法、装置、记录媒体及系统[发明专利]](https://img.taocdn.com/s1/m/f79ff70ce3bd960590c69ec3d5bbfd0a7956d5c4.png)
专利名称:一种双镜头立体视觉系统优化方法、装置、记录媒体及系统
专利类型:发明专利
发明人:王龙华,曾国华,胡华锋,钱进,王蔚,汪先炜,张宏宇,王磊
申请号:CN202111203270.9
申请日:20211015
公开号:CN114117729A
公开日:
20220301
专利内容由知识产权出版社提供
摘要:本发明涉及视觉系统优化领域,公开了一种双镜头立体视觉系统优化方法,包括下述步骤:确定双镜头立体视觉系统的测量区域和双镜头基线位置;构建自变量包括光轴方向、双镜头距离及反射镜偏心率的测量误差函数;求出测量误差最小时对应的所述自变量的集合;按该集合包含的参数配置立体视觉系统的镜头。
本发明还提供了一种包括存储有上述方法程序的非暂态可读记录媒体及处理电路构成的装置和系统,通过处理电路可以调用该程序,以执行上述方法,完成对视觉系统的优化。
本发明有效减小了视觉系统的误差,降低了成像的失真度,适用于对双镜头立体视觉系统进行优化配置操作。
申请人:国网电力科学研究院武汉南瑞有限责任公司
地址:430074 湖北省武汉市洪山区珞瑜路143号
国籍:CN
代理机构:武汉开元知识产权代理有限公司
更多信息请下载全文后查看。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910126649.0
(22)申请日 2019.02.20
(71)申请人 重庆工程职业技术学院
地址 400000 重庆市江津区滨江新城南北
大道1号
(72)发明人 韩治华 陈立力
(74)专利代理机构 成都行之专利代理事务所
(普通合伙) 51220
代理人 梁田
(51)Int.Cl.
H04N 5/225(2006.01)
H04N 5/232(2006.01)
H04N 5/235(2006.01)
H04N 5/33(2006.01)
G03B 15/03(2006.01)
(54)发明名称
一种双模式机器视觉镜头以及控制方法
(57)摘要
本发明公开了一种双模式机器视觉镜头以
及控制方法,包括镜头本体,所述镜头本体上设
置有两个同一水平位置的视觉镜头,在视觉镜头
的左右两侧都设置有补光灯,两个视觉镜头的同
侧都设置有红外成像镜头,通过在普通视觉镜头
上增加红外成像镜头,通过两个同样规格的红外
成像镜头与原本的视觉镜头进行相似的关系设
定,处理器可以得到与普通视觉镜头相同视角的
红外画面,当环境差,通过普通视觉镜头无法得
到清晰的图片时,处理器控制切换成红外成像镜
头,采集红外成像进行图形分析,由此,方便设置
两种镜头各自的CCD以达到各自模式下最好的成
像效果。
权利要求书1页 说明书3页 附图1页CN 109698899 A 2019.04.30
C N 109698899
A
权 利 要 求 书1/1页CN 109698899 A
1.一种双模式机器视觉镜头,包括镜头本体,所述镜头本体上设置有两个同一水平位置的视觉镜头(1),在视觉镜头(1)的左右两侧都设置有补光灯(2),其特征在于,两个视觉镜头(1)的同侧都设置有红外成像镜头(3),两个红外成像镜头(3)位于同一水平面;所述红外成像镜头(3)的光轴与其临近的视觉镜头(1)的光轴平行;两个红外成像镜头(3)的两个成像板之间的距离与两个视觉镜头(1)的两个成像板之间的距离相同;
所述红外成像镜头(3)连接图像采集模块,图像采集模块将接收的图像信息传给处理器,处理器用于接收图像采集模块传来的图像信息进行图像识别处理,所述处理器连接连接红外光补光灯驱动电路,红外光补光灯驱动电路用于接收处理器发出的控制命令并控制红外光补光灯(4)的通断;处理器还用于切换视觉镜头(1)与红外成像镜头(3)。
2.根据权利要求1所述的一种双模式机器视觉镜头,其特征在于,所述红外成像镜头
(3)位于视觉镜头(1)的下侧。
3.根据权利要求1所述的一种双模式机器视觉镜头,其特征在于,所述红外成像镜头
(3)的两侧都设置有红外光补光灯(4)。
4.根据权利要求3所述的一种双模式机器视觉镜头,其特征在于,所述红外光补光灯(4)设置有四个,每一侧各两个,同侧的两个红外光补光灯的中心连线的中点,与两个红外成像镜头(3)处于同一水平面。
5.根据权利要求1所述的一种双模式机器视觉镜头,其特征在于,所述镜头本体包括镜头盒,所述视觉镜头(1)与红外成像镜头(3)位于镜头盒内。
6.一种双模式机器视觉镜头控制方法,其特征在于,采用权利要求1至5中任意一项所述的一种双模式机器视觉镜头机器人监控系统,监控初始,开启视觉镜头采集监控环境的图像进行识别,当识别率低于设定阈值时,启动红外成像镜头进行采集图形。
2。