机器视觉镜头选型和应用
- 格式:pdf
- 大小:955.00 KB
- 文档页数:23
光源选型技巧及应用案例光源选型技巧及应用案例用一句常说的话来开头:机器视觉是用机器代替人眼来做测量和判断;机器视觉系统主要包含相机、镜头、光源、图像处理系统和执行机构。
而光源作为其中重要组成部分,直接关系到系统的成败。
为什么这样说呢,在视觉系统中图像是核心,选择合适的光源能够呈现一幅好的图像,能够简化算法提高系统稳定性,一幅图像如果曝光过度则会隐藏很多重要的信息;出现阴影则会引起边缘误判;图像不均匀则会导致阈值选择困难。
因此要保证有较好的图像效果,就必须要选择一个合适的光源。
机器视觉涉及行业广泛包含电子、汽车、包装、印刷、食品、医疗等。
因而我们面临的检测产品也是多种多样:形状大小不同、颜色材质不一、检测环境和指标各异。
面对种类繁多要求各异的检测产品如何选择光源呢,我们先来看一下常见的光源特性。
目前理想的视觉光源有高频荧光灯、光纤卤素灯、氙气灯、LED 光源。
应用最多是LED光源,这里就详细介绍几种常见的LED光源。
1、环形光源:LED灯珠排布成环形与圆心轴成一定夹角,有不同照射角度、不同颜色等类型,可以突出物体的三维信息;解决多方向照明阴影问题;图像出现灯影情况可选配漫射板,让光线均匀扩散。
应用:螺丝尺寸缺陷检测,IC定位字符检测,电路板焊锡检查,显微镜照明等。
2、条形光源:LED灯珠排布成长条形。
多用于单边或多边以一定角度照射物体。
突出物体的边缘特征,可根据实际情况多条自由组合,照射角度与安装距离随有较好自由度。
适用较大结构被测物。
应用:电子元件缝隙检测,圆柱体表面缺陷检测,包装盒印刷检测,药水袋轮廓检测等。
3、同轴光源:经面光源采用分光镜设计。
适用于粗糙程度不同、反光强或不平整的表面区域,检测雕刻图案、裂缝、划伤、低反光与高反光区域分离、消除阴影等。
需要注意的是同轴光源经过分光设计有一定的光损失需要考虑亮度,并且不适用于大面积照射。
应用:玻璃和塑料膜轮廓和定位检测,IC字符及定位检测,晶片表面杂质和划痕检测等。

工业镜头相关参数工业镜头是一种用于工业应用的专用光学镜头,广泛应用于机器视觉系统、工业自动化设备、医疗设备等领域。
在选择和使用工业镜头时,了解相关参数是非常重要的。
本文将介绍一些常见的工业镜头相关参数,帮助读者更好地理解和选择适合自己需求的工业镜头。
1. 焦距 (Focal Length)焦距是工业镜头最基本的参数之一,它决定了镜头的放大倍率和视场角。
焦距越长,所拍摄的场景越小,放大倍率越大;焦距越短,所拍摄的场景越大,放大倍率越小。
一般来说,焦距越长的镜头适用于需要放大细节的应用,焦距越短的镜头适用于需要拍摄大范围场景的应用。
2. 对焦范围 (Focus Range)对焦范围是指工业镜头能够清晰对焦的距离范围。
在工业应用中,对焦范围通常需要根据实际需求来选择。
对焦范围较小的镜头适合需要对焦于近距离物体的应用,对焦范围较大的镜头适合对焦于远距离物体的应用。
3. 光学口径 (Optical Aperture)光学口径是指工业镜头镜片的直径大小,决定了镜头能够通过的光线量。
光学口径越大,镜头能够通过的光线越多,适用于低光条件下的拍摄。
光学口径对应的F值也是评估镜头透光能力的指标,F值越小,透光能力越强。
4. 图像传感器尺寸 (Image Sensor Size)图像传感器尺寸是指工业相机所使用的图像传感器的尺寸大小。
工业镜头的图像传感器尺寸需要与相机的图像传感器尺寸相匹配才能获得最佳的成像效果。
常见的图像传感器尺寸有1/3英寸、1/2英寸、2/3英寸等。
5. 解析度 (Resolution)解析度是指工业镜头能够捕捉和呈现的图像细节数量和清晰度。
解析度通常以水平线对应的图像细节数量来表示,单位为线对每毫米。
较高的解析度意味着镜头能够捕捉更多的细节并提供更清晰的图像。
6. 失真率 (Distortion)失真率是评估工业镜头图像形变程度的指标。
镜头失真会使图像形状发生扭曲或拉伸,影响成像的准确性。
低失真率的工业镜头能够提供更真实、更准确的图像。
机器视觉镜头选型原则机器视觉是一种通过使用相机和其他传感器来模拟人类视觉以实现目标检测和识别的技术。
在机器视觉中,选择合适的镜头是至关重要的,因为它直接关系到图像质量和视觉算法的性能。
以下是一些机器视觉镜头选型的原则和参考内容。
1. 分辨率:分辨率是指镜头能够捕捉细节的能力。
在选择镜头时,应根据需要的应用和要求选择适当的分辨率。
如果需要检测和识别小尺寸的目标或精细的图像特征,需要选择具有较高分辨率的镜头。
2. 焦距:焦距决定了镜头的视场范围和放大倍率。
对于机器视觉应用,焦距的选择应根据需要的视场范围和目标大小来确定。
较长的焦距可以提供更大的视场,但放大倍率较小;而较短的焦距可以提供更大的放大倍率,但视场较小。
3. 光圈:光圈是控制镜头进入的光线量的孔径大小。
较大的光圈可以提供更多的光线,使图像更明亮,但深度-of-field 相对较浅;而较小的光圈可以提供更深的景深范围,但可能需要较长的曝光时间。
光圈的选择应根据可用的光照条件和需要的景深来确定。
4. 畸变:镜头畸变是指镜头图像与实际对象之间的形状偏差。
选择镜头时,应尽量选择具有较小畸变的镜头,以确保图像准确地反映出实际场景。
5. 透过率:透过率是指镜头对光线透过的能力。
一个高透过率的镜头可以捕捉到更多的光线,提供更明亮和清晰的图像。
因此,在选择镜头时,应尽量选择具有高透过率的镜头。
6. 调焦和变焦:一些机器视觉应用可能需要在检测和识别过程中动态调整焦距。
因此,在选择镜头时,应考虑是否需要具有自动调焦或变焦功能。
7. 传感器尺寸:镜头的传感器尺寸应与相机传感器尺寸匹配。
如果相机使用较小的传感器,选择适当尺寸的镜头以确保最佳的图像质量和性能。
8. 适应环境:在选择机器视觉镜头时,还需要考虑应用的环境条件,例如室内还是室外,光照条件等。
根据环境中的光线质量和强度,选择镜头的特定设计和材料。
总的来说,在选择机器视觉镜头时,需要综合考虑应用需求、图像质量、光照条件以及环境要素等因素。
工业相机镜头地全参数与选型工业相机镜头是工业自动化领域中重要的设备之一,广泛应用于机器视觉、智能检测、无损检测等领域。
在选购工业相机镜头时,需要考虑到相机的应用环境、被测物体的特性以及相机镜头的参数。
本文将介绍工业相机镜头的全参数并进行选型分析。
一、工业相机镜头的全参数1.焦距(Focal Length):焦距是镜头将光线聚焦的能力。
不同的焦距会影响镜头的视角和放大倍数。
一般来说,较长焦距的镜头具有较大的放大倍数和较小的视角,适合远距离拍摄;较短焦距的镜头具有较小的放大倍数和较大的视角,适合近距离大范围拍摄。
2.镜头结构(Lens Structure):镜头的结构包括透镜的数量和排列方式。
常见的结构有单透镜结构、双透镜结构、复合透镜结构等。
不同的结构会影响成像质量、畸变程度和成本。
3.光圈(Aperture):光圈控制着进入相机的光线量,它是一个由多个薄片组成的机械装置。
可以通过调节光圈的大小来控制曝光量和景深。
较大的光圈适合拍摄光线较暗的场景,提高曝光量;较小的光圈适合拍摄光线较亮的场景,提高景深。
4.最小对焦距离(Minimum Focus Distance):最小对焦距离是指物体与镜头的最小距离,也是相机能够聚焦的最小距离。
镜头的最小对焦距离直接影响镜头的应用范围,较小的最小对焦距离适合拍摄微小物体,较大的最小对焦距离适合拍摄大型物体。
5.最大光学放大倍率(Maximum Optical Magnification):最大光学放大倍率是镜头能够放大物体的倍数。
较大的光学放大倍率可以提高图像的清晰度和细节,适合拍摄对细节要求较高的场景。
6.视场角(Field of View):视场角是指从相机镜头看到的场景范围。
它受到镜头焦距、相机感光元件尺寸和被测物体距离的影响。
一般来说,较长焦距的镜头具有较小的视场角,较短焦距的镜头具有较大的视场角。
7.图像传感器尺寸(Image Sensor Size): 图像传感器尺寸是指相机感光元件的尺寸。
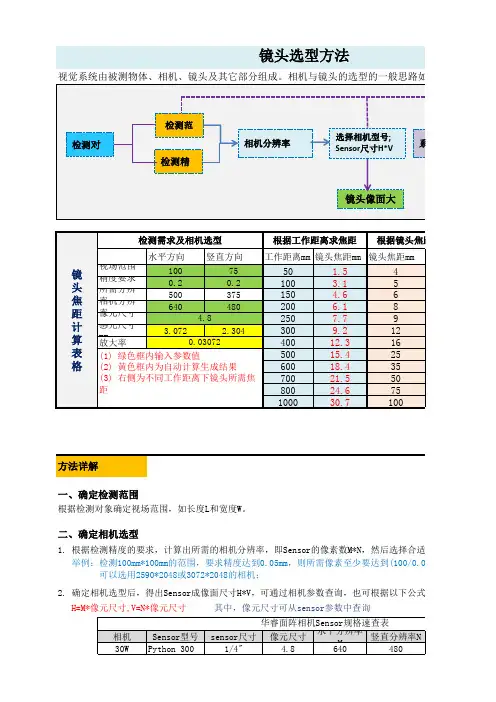
镜头选型方法一、确定检测范围根据检测对象确定视场范围,如长度L和宽度W。
二、确定相机选型1. 根据检测精度的要求,计算出所需的相机分辨率,即Sensor的像素数M*N,然后选择合适的 举例:检测100mm*100mm的范围,要求精度达到0.05mm,则所需像素至少要达到(100/0.05) 可以选用2590*2048或3072*2048的相机;2. 确定相机选型后,得出Sensor成像面尺寸H*V,可通过相机参数查询,也可根据以下公式计H=M*像元尺寸,V=N*像元尺寸 其中,像元尺寸可从sensor参数中查询3. 确定相机选型后,计算成像系统的放大率β=目标成像尺寸/目标实际尺寸=Sensor尺寸/对应视场大小举例:采用200W相机,Sensor水平尺寸H=9.216mm,对应检测长度L=100mm,则系统放大率 β=H/L=0.092三、镜头选刑1. 确定镜头像面规格及分辨率:(1) 镜头成像面应不小于Sensor成像面尺寸,否则可能会出现黑边或暗角。
如搭配1/1.8"相机(2) 镜头成像面不宜大于Sensor尺寸太多,否则可能会导致镜头清晰度不高或价格过高或外形(3) 镜头分辨力一般不低于Sensor分辨率要求,如1/1.8" 600W相机搭配2/3" 2MP镜头时清晰度2. 根据视场范围、Sensor尺寸和工作距离估算镜头焦距f:若工作距离为D,则镜头焦距可按以下公式进行估算:f=β*D举例:若系统成像放大率β=0.092,工作距离D=200mm,则镜头焦距约为f=0.092*200mm=19.4mm;此时选择1 则实际放大率β=f/D=0.08;若要保证原来0.092mm的放大率,可将工作距离调整为D=16/0.092=173m合适的相机型号0.05)*(100/0.05)=2000*2000,公式计算:92*200mm=19.4mm;此时选择16mm镜头,作距离调整为D=16/0.092=173mm清晰度可能较差;nsor尺寸/对应视场大小则系统放大率 β=H/L=0.092"相机可选用1/1.8"或2/3"的镜头;或外形尺寸过大等问题;。
机器视觉中用工业镜头与工业相机CCD选型指导手册道镜头的参数指标光学镜头一般称为摄像镜头或摄影镜头,简称镜头,其功能就是光学成像。
在机器视觉系统中,镜头的主要作用是将成像目标聚焦在图像传感器的光敏面上。
镜头的质量直接影响到机器视觉系统的整体性能;合理选择并安装光学镜头,是机器视觉系统设计的重要环节。
1.镜头的相关参数1焦距焦距是光学镜头的重要参数,通常用 f 来表示。
焦距的大小决定着视场角的大小,焦距数值小,视场角大,所观察的范围也大,但距离远的物体分辨不很清楚;焦距数值大,视场角小,观察范围小,只要焦距选择合适,即便距离很远的物体也可以看得清清楚楚。
由于焦距和视场角是一一对应的,一个确定的焦距就意味着一个确定的视场角,所以在选择镜头焦距时,应该充分考虑是观测细节重要,还是有一个大的观测范围重要,如果要看细节,就选择长焦距镜头;如果看近距离大场面,就选择小焦距的广角镜头。
2光阑系数即光通量,用 F 表示,以镜头焦距 f 和通光孔径 D 的比值来衡量。
每个镜头上都标有最大 F 值,例如6mm/F1.4 代表最大孔径为 4.29 毫米。
光通量与 F 值的平方成反比关系,F 值越小,光通量越大。
镜头上光圈指数序列的标值为 1.4,2,2.8,4,5.6,8,11,16,22 等,其规律是前一个标值时的曝光量正好是后一个标值对应曝光量的 2 倍。
也就是说镜头的通光孔径分别是 1/1.4,1/2,1/2.8,1/4,1/5.6,1/8,1/11,1/16,1/22,前一数值是后一数值的根号 2 倍,因此光圈指数越小,则通光孔径越大,成像靶面上的照度也就越大。
3景深摄影时向某景物调焦,在该景物的前后形成一个清晰区,这个清晰区称为全景深,简称景深。
决定景深的三个基本因素: 光圈光圈大小与景深成反比,光圈越大,景深越小。
焦距焦距长短与景深成反比,焦距越大,景深越小。
物距物距大小与景深成正比,物距越大,景深越大。
机器视觉选型相机规则机器视觉是一种模拟人眼进行图像识别和处理的技术,广泛应用于工业自动化、无人驾驶、安防监控等领域。
而相机作为机器视觉的重要组成部分,其选型规则对于机器视觉系统的性能和稳定性具有关键影响。
本文将从分辨率、帧率、感光元件、镜头、接口等方面介绍相机选型的规则。
一、分辨率相机的分辨率是指图像的像素数量,通常用横向像素数和纵向像素数表示。
分辨率越高,图像细节越丰富,但也会增加图像处理的计算量。
在选择相机分辨率时,需根据实际应用场景和需求来确定,避免过高或过低的分辨率。
二、帧率帧率是指相机每秒传输的图像帧数,常用单位为fps(Frames Per Second)。
帧率越高,图像的连续性越好,适用于高速运动物体的检测和追踪。
但高帧率相机通常价格昂贵,且会增加数据处理的复杂度。
三、感光元件感光元件是相机的核心部件,决定了图像的质量和灵敏度。
常见的感光元件有CCD和CMOS两种。
CCD感光元件具有较高的图像质量和低噪声特性,适用于对图像质量要求较高的应用场景;而CMOS感光元件则具有低功耗、高速度、集成度高等优势,适用于对帧率要求较高的应用场景。
四、镜头镜头是相机的光学系统,直接影响图像的清晰度和视场范围。
选择镜头时,需考虑焦距、光圈、视场角等参数。
焦距决定了镜头的放大倍数,光圈决定了镜头的透光能力,视场角决定了镜头的拍摄范围。
根据实际需求,选择合适的镜头参数,以获得清晰、准确的图像。
五、接口相机与其他设备的连接通常通过接口完成,常见的接口有USB、GigE、Camera Link等。
USB接口简单易用,适用于小型相机和低带宽应用;GigE接口具有较高的传输速度和稳定性,适用于大带宽应用;Camera Link接口则适用于对图像传输速度和稳定性要求较高的应用。
总结起来,机器视觉选型相机的规则包括分辨率、帧率、感光元件、镜头和接口。
在选型时,需根据实际应用需求和预算来确定各项参数。
同时,还需要考虑相机的稳定性、可靠性和兼容性等因素,以确保机器视觉系统的正常运行和性能表现。
机器视觉镜头的选型和分类方法机器视觉镜头是一种设计用于机器视觉系统的镜头,也称为工业相机镜头。
机器视觉系统通常由工业相机、镜头、光源以及图像处理软件等部分组成,用于自动进行图像采集、处理和分析,从而在非接触情况下自动判断工件的质量或完成精确位置的测量,常用于高精度测量、自动化装配、无损检测、瑕疵检测、机器人导航等众多领域。
1.机器视觉镜头选型要考虑哪些?机器视觉镜头在选型时需要综合考虑多种因素,才能找到最适合自己的镜头,以下几个因素是常见的考虑要素:①视场(FOV)和工作距离(WD)。
视场和工作距离决定了你可以看到多大的物体和镜头到物体的距离。
②适配的相机类型和传感器大小。
选择的镜头必须与你的相机接口匹配,并且镜头的像面曲径要大于或等于传感器的对角线距离。
③透射光束入射光束。
需要明确你的应用是否需要低畸变、高解析度、大深度或者大孔径等镜头配置。
④物体尺寸和分辨能力。
你要检测的物品有多大、需要多细的分辨率,这些需要明确,决定你需要多大的视场和多少像素的相机。
⑤环境条件。
如果对环境有特殊的需求,比如防震、防尘或防水等,需要选择能够满足这些需求的镜头。
⑥成本预算。
你能承受的成本是什么样的,这会影响到你最终选择的镜头品牌和型号。
2.机器视觉镜头的分类方法镜头的选型需要考虑多种因素,机器视觉镜头根据不同的标准也可以分为不同的类型:①根据焦距类型,可分为:定焦镜头(焦距固定不可调节)、变焦镜头(焦距可调节,操作灵活)。
②根据光圈类型,可分为:手动光圈镜头(光圈需要手动调节)、自动光圈镜头(镜头能根据环境光线自动调节光圈)。
③根据成像分辨率需求,可分为:标准分辨率镜头(适用于普通监控、质量检验等一般的成像需求)、高分辨率镜头(适用于精密检测、高速成像等对分辨率要求较高的应用)。
④根据传感器尺寸,可分为:小传感器格式镜头(适用于1/4"、1/3"、1/2"等小型传感器)、中传感器格式镜头(适用于2/3"、1"等中型传感器)、大传感器格式镜头(适用于35mm 全画幅或更大尺寸的传感器)。
机器视觉技术在电视节目制作中的应用随着科技的不断进步,人们的生活中充斥着各种新奇的技术,其中机器视觉技术便是一种越来越流行的技术。
机器视觉技术是一种通过计算机视觉和图像处理方法来模拟人类视觉系统的技术,它能够让机器像人一样“看到”和“理解”图像信息。
在电视节目制作中,机器视觉技术的应用已经变得越来越普遍,下面我们就来一起了解一下吧。
一、用机器视觉技术制作整体节目在电视节目制作中,为了让观众能够有更好的视觉效果和沉浸感,制作团队会使用各种特效和图像合成技术。
而机器视觉技术的出现,为制作团队带来了更为高效和精准的制作方案。
例如,利用机器视觉技术,可以将多张图像或视频进行自动化编辑,从而制作出高质量的电视节目。
另外,机器视觉技术也广泛应用于跨媒体的内容创作中。
例如,在台前制作直播节目中,镜头可以通过机器视觉来判断人物的表情情感,从而根据不同的表情情感选择合适的画面和效果以呈现观众想要看到的效果。
二、用机器视觉技术制作特效画面和虚拟现实场景在电视节目中,特效画面和虚拟现实场景是不可或缺的元素,而机器视觉技术的运用又为这些元素制作带来了更为高效和智能的解决方法。
例如,在体育赛事的转播中,机器视觉可以通过识别球员运动的轨迹和姿势,来制作出更为逼真的场景模拟和球员运动跟踪制作效果。
同时,这项技术还可以让观众看到更多的细节和互动体验,带来更为丰富的体验和视觉感受。
三、用机器视觉技术提高直播效率和质量除了制作整体节目、特效画面和虚拟现实场景,机器视觉技术在直播节目中的应用也是不可或缺的。
例如,在一些体育比赛中,机器视觉可以通过识别球员运动轨迹和球场上的各种细节,从而实时生成更为逼真的数据和分析结果。
这样,主播和解说员就可以更加轻松自如地进行数据分析和解说,同时吸引更多的观众。
还有一项非常重要的应用——语音识别技术。
利用机器视觉对主播、嘉宾和观众发出的语音进行实时识别和翻译,可以极大提高直播节目的效率和质量,不再需要人工实时翻译。
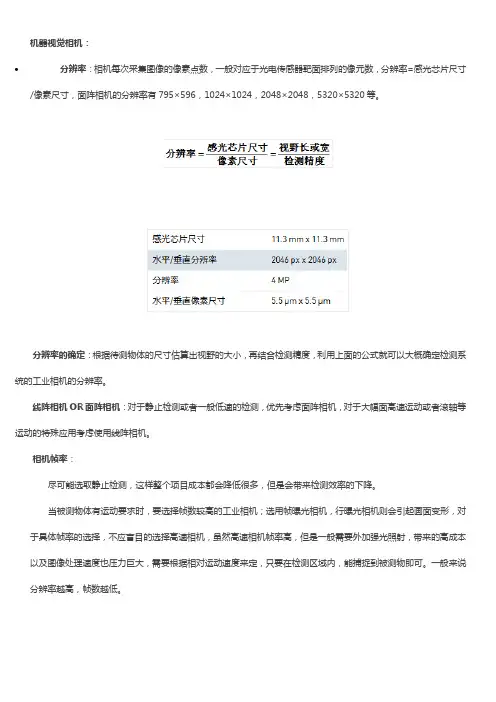
机器视觉相机:•分辨率:相机每次采集图像的像素点数,一般对应于光电传感器靶面排列的像元数,分辨率=感光芯片尺寸/像素尺寸,面阵相机的分辨率有795×596,1024×1024,2048×2048,5320×5320等。
分辨率的确定:根据待测物体的尺寸估算出视野的大小,再结合检测精度,利用上面的公式就可以大概确定检测系统的工业相机的分辨率。
线阵相机OR面阵相机:对于静止检测或者一般低速的检测,优先考虑面阵相机,对于大幅面高速运动或者滚轴等运动的特殊应用考虑使用线阵相机。
相机帧率:尽可能选取静止检测,这样整个项目成本都会降低很多,但是会带来检测效率的下降。
当被测物体有运动要求时,要选择帧数较高的工业相机;选用帧曝光相机,行曝光相机则会引起画面变形,对于具体帧率的选择,不应盲目的选择高速相机,虽然高速相机帧率高,但是一般需要外加强光照射,带来的高成本以及图像处理速度也压力巨大,需要根据相对运动速度来定,只要在检测区域内,能捕捉到被测物即可。
一般来说分辨率越高,帧数越低。
买机器视觉相机时,选择合适的处理器是至关重要的决定。
具有与基于PC的系统相媲美的各种功能,灵活性和速度,可以让您实时处理图像。
买机器视觉相机通常只是自动化系统的一部分。
摄像机提供的决策或指令可以发送到从机器人控制器到云服务器的所有内容。
普通镜头选型步骤:获得物体至镜头的距离(工作距离)WD,如果是一个范围,取中间值;通过已知的传感器成像面高度Hi和被测物尺寸(视场高度)Ho计算图像放大倍数PMAG;PMAG= Sensor Size(mm) / Field of View(mm)=Hi /Ho利用公式计算所需的焦距f;f=WD*PMAG / (1+PMAG)选取与计算值最接近的标准镜头产品,并取其焦距值;标准镜头焦距:8mm、12.5mm、16mm、25mm和50mm根据所选镜头焦距重新核算镜头到物体的距离WD。
机器视觉镜头选型原则机器视觉镜头是机器视觉系统中一个至关重要的组成部分,其选型直接影响到整个系统的性能和可靠性。
在进行机器视觉镜头选型时,需要考虑以下几个原则:1. 分辨率:镜头的分辨率是指镜头可以捕捉到的最小细节,它对于机器视觉系统中物体识别和测量的准确性非常重要。
选择具有高分辨率的镜头可以更好地捕获细节,提高系统的准确性。
2. 焦距:焦距是指镜头的聚焦能力,它决定了镜头的视场大小和物体的放大倍数。
在选型时,需要根据实际应用需求来选择适当的焦距。
对于需要监测远距离物体的应用,可以选择长焦距镜头;而对于需要监测近距离物体的应用,可以选择短焦距镜头。
3. 光圈:光圈是指镜头的最大光线通量,它决定了镜头的透光能力和图像的亮度。
在选型时,需要考虑光线条件,并选择适当的光圈大小以确保图像质量。
一般来说,较大的光圈可以提供更好的透光能力和图像亮度,但可能会导致景深较浅;而较小的光圈则可以提供较深的景深,但可能会影响图像亮度。
4. 像高:像高是指在传感器上的图像高度,它决定了图像的视角和图像质量。
在选型时,需要根据实际应用需求来选择适当的像高。
较大的像高可以提供更大的视角,但可能会导致图像失真和畸变;而较小的像高可以提供更好的图像质量,但可能会限制视角。
5. 套件:在选型时,还可以考虑选择配套的镜头套件。
镜头套件是指由镜头、适配器和其他配件组成的整套系统,可以提供更好的光学性能和便捷的安装和调整。
根据实际需求,可以选择适配器,使镜头能够适配不同的相机和传感器;同时,还可以选择其他配件,如滤光镜和遮光罩,以提高图像质量和系统性能。
综上所述,机器视觉镜头选型需要综合考虑分辨率、焦距、光圈、像高和套件等因素。
在选择时,需要根据实际应用需求和场景特点来权衡各个因素,并选择最适合的镜头来提高机器视觉系统的性能和可靠性。
机器视觉镜头选型原则
机器视觉技术在各个领域的应用越来越广泛,镜头选型是机器视觉系统设计中至关重
要的一环。
以下是一些常见的机器视觉镜头选型原则:
1. 分辨率:分辨率是指镜头对图像细节的捕获能力。
根据应用需求,选取具有足够
高分辨率的镜头,以确保系统可以识别并处理所需的图像细节。
2. 焦距和视场角:焦距和视场角决定了镜头的视野范围。
根据具体应用场景,选择
适当的焦距和视场角,以确保系统可以覆盖所需的区域。
3. 光圈:光圈决定了镜头的光线透过能力,直接关系到图像的亮度和对比度。
根据
环境光照条件和应用需求,选择合适的光圈,以确保系统能够获得清晰明亮的图像。
4. 镜头类型:根据具体应用需求,选择合适的镜头类型,如定焦镜头、变焦镜头、
鱼眼镜头等。
不同类型的镜头适用于不同的场景和任务,需综合考虑。
5. 调焦方式:选择合适的镜头调焦方式,可以根据应用需求进行自动焦距调整或手
动调焦。
自动调焦镜头适用于需要经常变化焦距的场景,手动调焦镜头适用于需要固定焦
距的场景。
6. 镜头质量:选择高质量的镜头,以确保图像的准确性和可靠性。
镜头的光学性能、扭曲和色散等因素都会直接影响系统的视觉性能。
7. 镜头尺寸和适配:根据机器视觉系统的结构和要求,选取合适尺寸的镜头,并确
保其能够与其他设备和配件兼容。
8. 成本和性价比:考虑机器视觉系统的预算和性能需求,综合考虑镜头的价格和性
价比,选择最符合实际需求的镜头。
以上是一些常见的机器视觉镜头选型原则,根据具体应用需求和系统设计,可以结合
实际情况进行调整和优化。
机器视觉镜头的选型一、镜头主要参数 1.焦距(Focal Length)焦距是从镜头的中心点到胶平面上所形成的清晰影像之间的距离。
焦距的大小决定着视角的大小,焦距数值小,视角大,所观察的范围也大;焦距数值大,视角小,观察范围小。
根据焦距能否调节,可分为定焦镜头和变焦镜头两大类。
2.光圈(Iris)用F表示,以镜头焦距f和通光孔径D的比值来衡量。
每个镜头上都标有最大F值,例如8mm /F1.4代表最大孔径为 5.7毫米。
F值越小,光圈越大,F值越大,光圈越小。
3.对应最大CCD尺寸(Sensor Size)镜头成像直径可覆盖的最大CCD芯片尺寸。
主要有:1/2″、2/3″、1″和1″以上。
4.接口(Mount)镜头与相机的连接方式。
常用的包括C、CS、F、V、T2、Leica、M42x1、M75x0.75等。
5.景深(Depth of Field,DOF)景深是指在被摄物体聚焦清楚后,在物体前后一定距离内,其影像仍然清晰的范围。
景深随镜头的光圈值、焦距、拍摄距离而变化。
光圈越大,景深越小;光圈越小、景深越大。
焦距越长,景深越小;焦距越短,景深越大。
距离拍摄体越近时,景深越小;距离拍摄体越远时,景深越大。
6.分辨率(Resolution)分辨率代表镜头记录物体细节的能力,以每毫米里面能够分辨黑白对线的数量为计量单位:“线对/毫米”(lp/mm)。
分辨率越高的镜头成像越清晰。
7、工作距离(Working distance,WD)镜头第一个工作面到被测物体的距离。
8、视野范围(Field of View,FOV)相机实际拍到区域的尺寸。
9、光学放大倍数(Magnification,?)CCD/FOV,即芯片尺寸除以视野范围。
10、数值孔径(Numerical Aperture,NA)数值孔径等于由物体与物镜间媒质的折射率n与物镜孔径角的一半(a\2)的正弦值的乘积,计算公式为N.A=n*sin a/2。
机器视觉硬件选型及应用案例烟台致瑞图像技术有限公司高志伟机器视觉典型结构机器视觉技术核心输出特征提取预处理采集图像机器视觉技术主要包括图像采集和图像处理两个过程,整体以图像为中心展开,如何得到一副好的图像,是关乎整个系统成败的关键。
图像采集器件选择相机•分辨率•感光性能•其它镜头•视野•畸变•分辨率•其它光源•成像效果•空间限制•其它配件•滤光•偏振•转向•……相机选型1.根据项目精度要求,确定相机分辨率;2.考虑相机帧率是否满足要求;3.根据项目情况选择合适的数据传输接口;4.确定使用黑白相机还是彩色相机;5.尺寸大小等其他问题。
镜头选型1.根据相机芯片大小和工作空间限制确定使用镜头的焦距或者放大倍数;2.考虑是否需要选用远心镜头;3.确定镜头分辨率;4.确定畸变率能否满足要求;5.景深是否满足要求;6.镜头是否兼容相机芯片尺寸;7.超大视野或超小视野;8.是否需要考虑透过光谱;9.镜头是否要配合其他配件;10.价格是否合理等其他问题。
光源选型Ø了解项目需求,明确要检测或者测量的目标;Ø分析目标与背景的区别,找出两者之间最可能差异大的光学现象;Ø根据光源与目标之间的配合关系,初步确定光源的发光类型;Ø拿实际光源测试,以确定满足要求的打光方式;Ø根据具体情况,确定适用于客户的产品。
常用经典配光方式方向漫射背光平行背光暗场配光明场配光无影光光谱白光单色光混合光近红外近紫外光波动光谱方向背光应用主要用于边缘提取、透明体内部不透明体检测、贯穿型缺陷检测、狭缝和通孔内杂质检测锯齿缺陷检测按键位置检测检测饮料瓶封装检测马达转子检测漫射背光存在的问题和解决办法暗场配光-低角度照射取、冲压、浇铸、浮雕图案识别与检测,光滑表面划伤、裂痕检测低角度照射-常用光源明场配光-高角度照射主要用于表面粗糙程度不同区域的区分、边缘或内部有垂直断差或者比较陡峭(超过60度)边缘检测或测量、光滑表面雕刻图案、裂缝、划伤、低反光与高反光区域分离等高角度照射-常用光源无影光应用可以避免弯曲表面导致的不均匀无影光胶囊缺陷检测平面无影光-银行卡平面无影光-银行卡案例目录偏振光应用ITO电路检测与定位多通道光源应用多向可控连续分布光源图形结构光应用裸板AOI大幅面表面检测偏振光应用偏振片(偏光片)自然光入射折射光垂直于反射光反射光为线偏振光Brewster定律自然光入射线偏振片线偏振光圆偏振片=线偏振片+1/4波片(45度)光入射圆偏振光偏振光应用反光偏振光应用反光贴膜旋光方案目录偏振光应用ITO电路检测与定位多通道光源应用多向可控连续分布光源图形结构光应用裸板AOI大幅面表面检测ITO电路检测与定位ITO(铟锡金属氧化物)具有很好的导电性和透明性,可以切断对人体有害的电子辐射、紫外线及远红外线,铟锡氧化物通常喷涂在玻璃、塑料及电子显示屏上,用作透明导电薄膜,同时减少对人体有害的电子辐射及紫外、红外辐射。