控制器正反作用选择
- 格式:doc
- 大小:25.50 KB
- 文档页数:1
控制器正反作用选择控制器正、反作用的确定在控制系统中,不仅是控制器,而且被控对象、测量元件及变送器和执行器都有各自的作用方向。
它们如果组合不当,使总的作用方向构成正反馈,则控制系统不但不能起控制作用,反而破坏了生产过程的稳定。
所以在系统投运前必须注意检查各环节的作用方向,其目的是通过改变控制器的正、反作用,以保证整个控制系统是一个具有负反馈的闭环系统。
所谓作用方向,就是指输入变化后,输出的变化方向。
当某个环节的输入增加时,其输出也增加,则称该环节为“正作用”方向,反之,当环节的输入增加时,输出减少的称“反作用”方向。
对于测量元件及变送器,其作用方向一般都是“正”的,因为当被控变量增加时,其输出量一般也是增加的,所以在考虑整个控制系统的作用方向时,可不考虑测量元件及变送器的作用方向(因为它总是“正”的),只需要考虑控制器、执行器和被控对象三个环节的作用方向,使它们组合后能起到负反馈的作用。
对于执行器,它的作用方向取决于是气开阀还是气关阀。
当控制器输出信号增加时,气开阀的开度增加,因而流过阀的流体流量也增加,故气开阀是“正”方向。
反之,由于当气关阀接收的信号增加时,流过阀的流体流量反而减少,所以是“反”作用。
执行器的气开或气关形式主要应从工艺安全角度来确定。
对于被控对象的作用方向,则随具体对象的不同而各不相同。
当操纵变量增加时,被控变量也增加的对象属于“正作用”的。
反之,被控变量随操纵变量的增加而降低的对象属于“反作用”的。
由于控制器的输出决定于被控变量的测量值于给定值之差,所以被控变量的测量值与给定值变化时,对输出的作用方向是相反的。
对于控制器的作用方向是这样规定的:当给定值不变,被控变量测量值增加时,控制器的输出也增加,称为“正作用”方向,或者当测量值不变,给定值减小时,控制器的输出增加的称为“正作用”方向。
反之,如果测量值增加(或给定值减小)时,控制器的输出减小的称为“反作用”方向。
在一个安装好的控制系统中,对象的作用方向由工艺机理可以确定,执行器的作用方向由工艺安全条件可以确定,而控制器的作用方向要根据对象及执行器的作用方向来确定,以使整个控制系统构成负反馈的闭环系统。

1,我记得上学的时候老师教的一个简单办法,不晓得有没有记错,判断副参变动对阀门的影响,可以确定副控的作用方式,再判断主参变动对阀门的影响,确定主控的作用方式,如果副控是正作用,则主控取反。
说白了就是分开判断主副控,然后如果副控是正作用,则相应主控取反。
2,主、副调节器正反作用方式的确定一个过程控制系统正常工作必须保证采用的反馈是负反馈。
串级控制系统有两个回路,主、副调节器作用方式的确定原则是要保证两个回路均为负反馈。
确定过程是首先判定为保证内环是负反馈副调节器应选用那种作用方式,然后再确定主调节器的作用方式。
以图1所示物料出口温度与炉膛温度串级控制系统为例,说明主、副调节器正反作用方式的确定。
副调节器作用方式的确定:首先确定调节阀,出于生产工艺安全考虑,燃料调节阀应选用气开式,这样保证当系统出现故障使调节阀损坏而处于全关状态,防止燃料进入加热炉,确保设备安全,调节阀的 Kv >0 。
然后确定副被控过程的Ko2,当调节阀开度增大,燃料量增大,炉膛温度上升,所以 Ko2 >0 。
最后确定副调节器,为保证副回路是负反馈,各环节放大系数(即增益)乘积必须为正,所以副调节器 K 2>0 ,副调节器作用方式为反作用方式。
主调节器作用方式的确定:炉膛温度升高,物料出口温度也升高,主被控过程 Ko1 > 0。
为保证主回路为负反馈,各环节放大系数乘积必须为正,所以副调节器的放大系数 K 1> 0,主调节器作用方式为反作用方式。
3,根据生产工艺安全原则,先确定其开关形式,然后按照被控对象的特性,决定其正反作用;最后遵照组成该系统的三个环节的静态放大系数极性相乘必须为正的原则,决定调节器的正反作用。
具体如下:先明白被控对象、调节阀、调节器的正、反作用方向是怎样规定的?被控对象的正反作用方向规定为:当操纵变量增加时,被控变量也增加的对象属于正作用;反之,被控变量随操纵变量的增加而降低的对象属于反作用调节阀的的作用方向由它的气开、气关型式来确定。


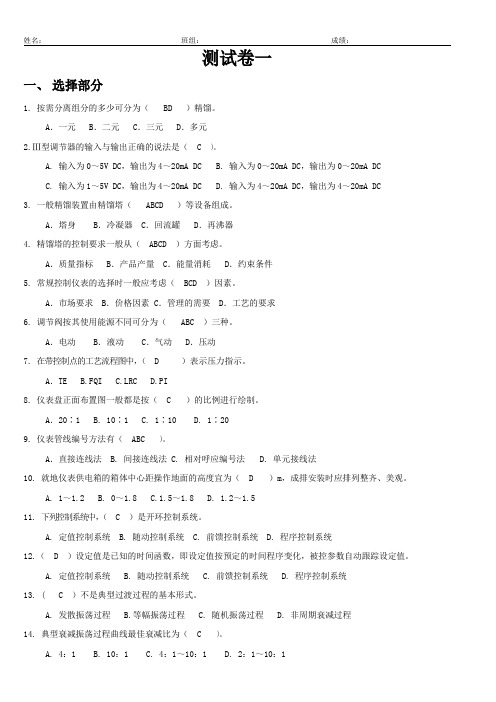
测试卷一一、选择部分1. 按需分离组分的多少可分为( BD )精馏。
A.一元 B.二元 C.三元 D.多元2.Ⅲ型调节器的输入与输出正确的说法是( C )。
A. 输入为0~5V DC,输出为4~20mA DCB. 输入为0~20mA DC,输出为0~20mA DCC. 输入为1~5V DC,输出为4~20mA DCD. 输入为4~20mA DC,输出为4~20mA DC3. 一般精馏装置由精馏塔( ABCD )等设备组成。
A.塔身 B.冷凝器 C.回流罐 D.再沸器4. 精馏塔的控制要求一般从( ABCD )方面考虑。
A.质量指标 B.产品产量 C.能量消耗 D.约束条件5. 常规控制仪表的选择时一般应考虑( BCD )因素。
A.市场要求 B.价格因素 C.管理的需要D.工艺的要求6. 调节阀按其使用能源不同可分为( ABC )三种。
A.电动 B.液动 C.气动D.压动7. 在带控制点的工艺流程图中,( D )表示压力指示。
A.TE B.FQI C.LRC D.PI8. 仪表盘正面布置图一般都是按( C )的比例进行绘制。
A.20∶1 B. 10∶1 C. 1∶10 D. 1∶209. 仪表管线编号方法有( ABC )。
A.直接连线法 B. 间接连线法 C.相对呼应编号法 D.单元接线法10. 就地仪表供电箱的箱体中心距操作地面的高度宜为( D )m,成排安装时应排列整齐、美观。
A. 1~1.2B. 0~1.8C.1.5~1.8D. 1.2~1.511. 下列控制系统中,( C )是开环控制系统。
A. 定值控制系统B. 随动控制系统C. 前馈控制系统D. 程序控制系统12.( D )设定值是已知的时间函数,即设定值按预定的时间程序变化,被控参数自动跟踪设定值。
A. 定值控制系统B. 随动控制系统C. 前馈控制系统D. 程序控制系统13. ( C )不是典型过渡过程的基本形式。
A. 发散振荡过程B.等幅振荡过程C. 随机振荡过程D. 非周期衰减过程14. 典型衰减振荡过程曲线最佳衰减比为( C )。
7.串级控制系统主回路是()控制系统,副回路是()控制系统。
A.比值B.定值C.程序D.随动8.通常串级控制系统主调节器正反作用选择取决于()。
A.调节阀B.副调节器C.副对象D.主对象9.()存在纯滞后,但不会影响调节品质。
A.调节通道B.测量元件C.变送器D.干扰通道10.串级调节系统主调节输出信号送给()。
A.调节阀B.副调节器 C.变送器 D.主对象11.串级控制系统设计时,副参数的选择应考虑()。
A.使副环包括主要干扰B.使副环包括尽量多的干扰C.当对象具有非线性环节时,在设计时应使非线性环节处于副回路之中D.尽量使副环少或不包括纯滞后12.串级控制系统参数整定步骤应为()。
A.先主环,后副环B.先副环后主环C.只整定副环D.没有先后顺序13.关于串级控制系统,正确的说法是()。
A.是两个单回路控制系统的串联B.串级系统的副回路是一个随动系统C.主回路是一个定值系统D.有两个闭合回路14.如图所示是一个()调节系统。
A.比值控制系统B.串级控制系统C.前馈控制系统D.定值控制系统T1C θ1送往分馏塔T2C燃料油θ2原油加热炉控制系统15.在串级调节系统中,主变量控制质量要求高、副变量要求不高时,主、副调节器的调节规律应分别选择()。
A.PI、PI B.PID(或PI)、P C.PI、P D.P、PI二、判断部分(共20分,每题2分)定,流速与管径的平.工艺流程图中,符号表示的是减压阀。
.工艺流程图中,符号表示的是减压阀。
流量均匀控制系统检测元件。
根据使用环境条件选择温度计接线盒。
串级控制系统主控制正反作用的判断方法1. 引言串级控制系统是一种常见的控制系统结构,它由多个级联的控制回路组成,其中每个回路负责控制系统的一部分。
主控制是串级控制系统中的关键部分,它决定了系统的整体性能。
主控制需要根据系统的反馈信息来判断正反作用,并做出相应的调整,以实现系统的稳定性和性能要求。
本文将介绍串级控制系统主控制正反作用的判断方法。
首先,我们将讨论什么是正反作用,以及为什么需要判断正反作用。
然后,我们将介绍几种常用的判断方法,并分析它们的优缺点。
最后,我们将总结本文的主要内容。
2. 正反作用的概念和意义正反作用是指控制系统中控制器输出信号与被控对象响应信号之间的关系。
如果控制器的输出信号与被控对象的响应信号同向变化,即控制器输出增加,被控对象响应也增加,那么我们称之为正作用。
相反,如果控制器的输出信号与被控对象的响应信号反向变化,即控制器输出增加,被控对象响应减小,那么我们称之为反作用。
正反作用的判断对于串级控制系统的稳定性和性能至关重要。
如果正反作用判断错误,可能导致系统不稳定或性能下降。
因此,我们需要准确判断正反作用,并根据判断结果进行相应的调整。
3. 判断正反作用的方法3.1 预先设定法预先设定法是最简单的判断正反作用的方法之一。
在这种方法中,我们根据被控对象的特性和系统的设计要求,预先设定正反作用的方向。
然后,通过观察控制器输出信号和被控对象响应信号的变化关系,判断实际的正反作用是否与预先设定的方向一致。
预先设定法的优点是简单易行,不需要过多的计算和分析。
然而,它的缺点也很明显,即无法考虑到系统的实际情况和动态变化。
如果系统的特性发生变化或者设计要求不准确,预先设定的正反作用方向可能是错误的,导致系统的稳定性和性能下降。
3.2 试控法试控法是一种通过实际试控来判断正反作用的方法。
在这种方法中,我们先设定一个控制器输出信号的初始值,并观察被控对象的响应。
然后,我们逐步调整控制器输出信号的大小,并观察被控对象的响应变化。
控制器的正反作用是指的自动控制回路。
如一个槽子的液位自动控制:当调节阀装在槽子的进料侧时,槽子液位计测量的液位高于我们设定的液位值时,调节阀要关小,此时我们说他是反作用。
当调节阀装在槽子的出料侧时,槽子液位计测量的液位高于我们设定的液位值时,调节阀要开大,此时我们说他是正作用。
RRRRR如上图,液位上升,入口阀开度减小,为反作用;液位上升,出口阀开度增大,为政作用。
就是阀门开度根据你测量值的增大而增大就是正作用就是阀门开度根据你测量值的减小而增大就是反作用(注意:调节阀的气开气关,流开流关,对正反作用的选择是有影响的。
例如:输出4~20ma 增大,IA气压增大,对气关阀来说,开度是减小的)首先说一下“控制器”,在现今的智能调节器或DCS等基于微处理器的控制系统中,就是指一段程序(或者说算法),大部分情况是指“PID调节器”(或PID算法)。
1.控制器的输出,就是控制算法的输出,在程序中它只是一个“内存变量”;如果非要对应到物理量,我想4-20mA更可能一些。
2.我的理解,决定正反作用,是输出在经过调整之后,使得测量值达到给定值之后的稳定状态的情况下,此时的输出和上一个稳态输出之间的相对关系,而不是在调节器正在动态响应的期间,在动态响应过程中,即使测量值一直在减小,控制器的输出也可能会发生方向上的改变。
楼主给的问题应该是正在动态过程中,是无法判断的。
"1.书中“控制器的输出”是指什么啊?是4-20mA的电流么还是20-100KPa的风压还是控制阀的开度?"“控制器的输出”是指4-20mA的电流,而与4-20mA的电流对应的是20-100KPa的风压.除非电/气转换器是反的."2.当被控变量大于设定值而正在减少时,如设定压力为1.0MPa,测量值正由1.2MPa降到1.1MPa但此时还是大于设定值,如果控制器的输出增加,是正作用还是反作用啊"正作用:偏差=PV-SV 的值增加,输出增加.偏差=PV-SV 的值减小,输出减小.反作用:偏差=PV-SV 的值增加,输出减小.偏差=PV-SV 的值减小,输出增加."当设定压力为1.0MPa,测量值正由1.2MPa降到1.1MPa,如果控制器的输出增加",是反作用.因为测量值正由1.2MPa降到1.1MPa, 是偏差=PV-SV 的值减小, 而控制器的输出增加,所以是反作用.。
实验六控制系统综合实验实验报告班级:化工卓越1201姓名:***学号:********实验内容1、执行器气开气关选择和控制器正反作用选择;要求液体不溢出,并写下选择结果。
执行器:气开控制器:反作用2、装置运行1)出水阀开在50%;2)控制器手动操作,调节MV信号,手动将液位调在40%;3)在手动操作下将液位再次调在60%,思考如何操作才能完成?并观察液位稳定时进水量和出水量之间的关系。
答:不断调节MV,直到选取的MV值能使液位稳定在60%。
液位稳定时进水量和出水量基本相等。
4)PID参数调整在Kc=2,Ti=5s,Td=0s,切换到自动。
5)在自动操作下改变给定值,观察一会,再切换到手动操作,观察手自动切换是否无扰动?手自动切换过程中给定值发生什么变化?答:手自动切换无干扰。
手自动切换时给定值基本无变化6)转换控制器正反作用,观察控制器正反作用选择错误会出现什么情况?答:液面将很快溢出液罐3、纯比例控制作用下的过渡过程测试1)出水阀开在50%,先手动操作,将液位稳定在50%左右。
2)调整PID参数:Kc=1,Ti>5000s,Td=0s。
3)切换到自动,将Sv由50%变化到60%,观察过渡过程,将图存下。
4)再切换到手动操作,将液位稳定在50%左右,调整Kc=3,切换到自动,将Sv由50%变化到60%,观察过渡过程,将图存下。
5)再切换到手动操作,将液位稳定在50%左右,调整Kc=5,切换到自动,将Sv由50%变化到60%,观察过渡过程,将图存下。
回答:1)纯比例作用是否存在余差?答:存在余差。
2)随着Kc增加,控制器输出发生什么变化?过渡过程会出现什么变化?余差如何变化?答:随Kc增加,控制器输出增大。
过渡过程变化:液位波动增大,波动频率变快,达到稳定所需时间变长,且稳定后显示偏离给定值程度较大。
余差增大。
4、PI作用下的过渡过程测试1)出水阀开在50%,先手动操作,将液位稳定在50%左右。
如果是串级控制回路,如图所示,它是一个加热炉出口温度对阀后压力的串级调节系统。
当燃料气压力变化时,副调节器动作使压力保持恒定,克服其可能给出口温度来的波动。
当出口温度变化时,温度调节器发出信号,改变副调节的给定,加减燃料量维护出口温度的稳定。
调节作用判定如下:
就以加热炉为例,对于副回路:其对象阀开大压力上升,则控制对象的特性为A 为“+”,选择合适的阀门气开(B取+),变送器输入变量增大(压力升高),输出信号也增大(毫安值变大)则为“+”。
根据上面的方法,判定副调节器为反作用,取“-”。
对于主回路:其对象阀开大,温度上升为正,对象的特性为A为“+”,气开阀为正,参数B为“+”,变送器的输入变量增大(温度升高),输出信号也增大(毫伏值变大),变送器为正,C为“+”,副调节器为反作用,取参数D为“-”。
A*B*C*D =负,因为选择主回路要使与各环节的乘积一致,所以主回路应该为“-”,主回路为反作用。
检查,当出口温度上升,主调节器输出减小,副调节器给定小于测量(TC 的输出为PC的给定值S.P,PT的输出为PC的测量值,给定值减小等效于给定值不变,测量值增大,反之亦然),反作用使输出减小,气开阀关闭,使出口温度下降,作用正确。
控制器正、反作用的确定
在控制系统中,不仅是控制器,而且被控对象、测量元件及变送器和执行器都有各自的作用方向。
它们如果组合不当,使总的作用方向构成正反馈,则控制系统不但不能起控制作用,反而破坏了生产过程的稳定。
所以在系统投运前必须注意检查各环节的作用方向,其目的是通过改变控制器的正、反作用,以保证整个控制系统是一个具有负反馈的闭环系统。
所谓作用方向,就是指输入变化后,输出的变化方向。
当某个环节的输入增加时,其输出也增加,则称该环节为“正作用”方向,反之,当环节的输入增加时,输出减少的称“反作用”方向。
对于测量元件及变送器,其作用方向一般都是“正”的,因为当被控变量增加时,其输出量一般也是增加的,所以在考虑整个控制系统的作用方向时,可不考虑测量元件及变送器的作用方向(因为它总是“正”的),只需要考虑控制器、执行器和被控对象三个环节的作用方向,使它们组合后能起到负反馈的作用。
对于执行器,它的作用方向取决于是气开阀还是气关阀。
当控制器输出信号增加时,气开阀的开度增加,因而流过阀的流体流量也增加,故气开阀是“正”方向。
反之,由于当气关阀接收的信号增加时,流过阀的流体流量反而减少,所以是“反”作用。
执行器的气开或气关形式主要应从工艺安全角度来确定。
对于被控对象的作用方向,则随具体对象的不同而各不相同。
当操纵变量增加时,被控变量也增加的对象属于“正作用”的。
反之,被控变量随操纵变量的增加而降低的对象属于“反作用”的。
由于控制器的输出决定于被控变量的测量值于给定值之差,所以被控变量的测量值与给定值变化时,对输出的作用方向是相反的。
对于控制器的作用方向是这样规定的:当给定值不变,被控变量测量值增加时,控制器的输出也增加,称为“正作用”方向,或者当测量值不变,给定值减小时,控制器的输出增加的称为“正作用”方向。
反之,如果测量值增加(或给定值减小)时,控制器的输出减小的称为“反作用”方向。
在一个安装好的控制系统中,对象的作用方向由工艺机理可以确定,执行器的作用方向由工艺安全条件可以确定,而控制器的作用方向要根据对象及执行器的作用方向来确定,以使整个控制系统构成负反馈的闭环系统。