雷尼绍测头培训PPT
- 格式:pptx
- 大小:2.30 MB
- 文档页数:56
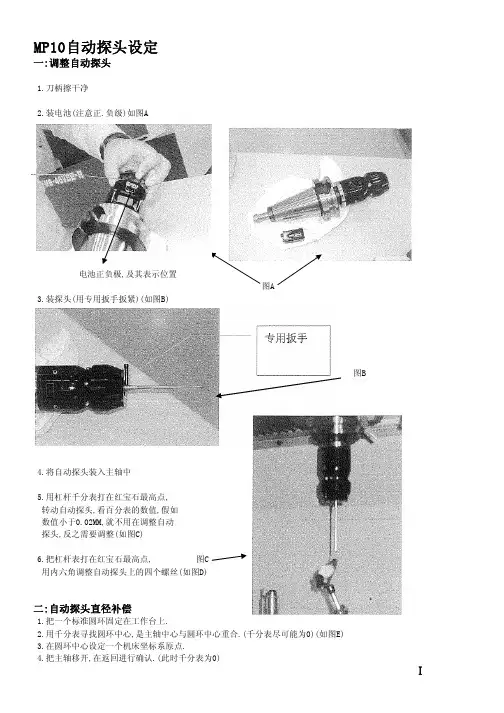
MP10自动探头设定一:调整自动探头1.刀柄擦干净2.装电池(注意正.负级)如图A电池正负极,及其表示位置图A3.装探头(用专用扳手扳紧)(如图B)图B4.将自动探头装入主轴中5.用杠杆千分表打在红宝石最高点,转动自动探头,看百分表的数值,假如数值小于0.02MM,就不用在调整自动探头,反之需要调整(如图C)6.把杠杆表打在红宝石最高点, 图C用内六角调整自动探头上的四个螺丝(如图D)二:自动探头直径补偿1.把一个标准圆环固定在工作台上.2.用千分表寻找圆环中心,是主轴中心与圆环中心重合.(千分表尽可能为0)(如图E)3.在圆环中心设定一个机床坐标系原点.4.把主轴移开,在返回进行确认.(此时千分表为0)Ⅰ调整螺丝位置图D 图E (FM MP3的调整螺丝在圆锥盖得里面)5.把自动探头放入主轴中,走到设定的原点(如图F)6.在MDI方式下,输入CALL OO18,启动.(自动探头加电,会有几秒的延时) (FMMP3输入 : CALL OO16)7.把自动探头下降到基准圆环平面以下10MM左右.8.在MDI方式下,输入CALL OO21,启动.(将设定的原点读入MSB原点)9.画面放在"测量结果显示",按"MSB原点"(MSB原点坐标,No.3号坐标系).10.输入VNCOM[1]=8,启动.11.将画面放在"测量结果显示"按"传感器",用手轻碰探头,看到传感器画面有黄色的指示灯会亮,进行信号确认,表示探头有信号.12.在MDI方式下,输入:CALL OO10 PMOD=9 PDI=50 POVT=3 启动.PMOD=9 表示自动探头半径补偿 PDI=50 表示基准环的准确直径 POVT=3表示超行程距离13.测量结果在"测量表示画面",按"MSB刀具ON/OFF"键.半径补偿的1-4号半径补偿值为探头4个方向的补偿值.14.在MDI方式下,输入:CALL OO19 启动(表示断电)(FMMP3输入:CALL OO17)三:自动探头长度方向补偿1.换基准棒.(记下标准棒的长度,假如为199.9MM)2.将基准棒的端面与量块轻微接触到(如图G).3.在此位置设定Z方向的原点.a.绝对长刀具补偿:运算199.9b.相对刀具补偿:运算04.抬起基准刀具,主轴换上自动探头.5.在MDI方式下输入:CALL OO18 启动 <VNCOM[1]=8检测信号>6.在手动方式下,将自动探头放在量块的上方,大约10MM左右(如图F).* 相对补偿,PLI=自动探头长度-基准棒长度(大概距离)9.CALL OO19 (自动探头断电)四:复制补偿数值图F1.将"MSB刀具ON/OFF"中的,半径补偿1-4号复制到5-20号,长度补偿的5号复制的1-4号.2.在MDI方式下,输入:CALL OO22 Ⅱ间距10MM左右 图G 图H使用自动探头一:内径测量1.探头放在孔的中心位置(大概),把探头的顶端移到孔内.2.MDI方式下:输入 CALL OO18 启动(FMMP3输入CALL OO16)3.测量: CALL OO10 PMOD=7 PDI=50 启动 .(PMOD=7表示测量孔德半径.PDI=50表示孔直径的预想值) 4:测量结果在"测量结果显示"中.5.设定孔中心为原点: CALL OO20 PHN=3 PX=0 PY=0 启动.(PHN=3表示为3号坐标系,PX,PY表示X与Y偏移量) 6:在MDI方式下,输入: CALL OO19 启动(FMMP3输入:CALL OO17)二:外径测量1.探头放在孔的中卫,并且在零件的上方.2.CALL OO18启动.3.测量: CALL OO10 PMOD=6 PDI=100 PIN=25 启动 (PMOD=6表示测量外径 PDI=100表示外径的预想值 PIN=25表示从探头顶端下降25mm.)4.以下操作同测内径操作.三:X向的端面测量 1.探头放在离被测平面不远的地方.2.在MDI方式下,输入: CALL OO10 PMOD=1 PEI=-255 启动 .(PEI=-255表示X向的预想值,预想值=当前位置+到被测面得距离) 3.设原点同上,设好原点后,再次确认,输入:CALL OO10 PMOD=1 PEI=0启动 PEI=0表示确认面与测量面差值为0.四:Y向端面测量1.测量:CALL OO10 PMOD=2 PEI=800 启动2.设原点和再次确认操作步骤同上.五:Z向测量.1.探头方在被测零件平面的上方.2.在MDI方式下,输入: G56H5 启动,HS=5表示MSB刀具长度补偿为五号.3.测量:CALL OO10 PMOD=3 PEI=-111 启动4.设原点和再次确认同上.六:测量两点间的距离探头放在被测量两点的大约中间位置.*X向测量:CALL OO10 PMOD=11 PELI=60 启动 *Y向测量:CALL OO10 PMOD=12 PELI=85 启动七:测量两端面的距离探头放还在被测两端面的中间,并放在零件的上面.* X向测量:CALL OO10 PMOD=11 PELI=130 PIN=30 启动* Y向测量:CALL OO10 PMOD=12 PELI=130 PIN=30 启动END Ⅲ。


三坐标雷尼绍Renishaw MCP测头
雷尼绍MCP测头简介
三坐标测头是进行测量时最重要的部分之一,现在行业内使用最多的就是雷尼绍的三坐标测头。
MCP手动旋转测头是一款性价比高的手动测头,是英国Renishaw公司高精度电子触发测头,精度高,故障率低,寿命长。
技术参数:
型号:HK-0100-0001
雷尼绍MCP手动测头
1、适应情况:手动及机动型测量机
2、技术指标
长度:50mm
直径:30mm
安装:柄测杆
安装:螺纹M3
触发方向:5向(±X±Y-Z)
各向重复精度:0.75μm测力:12g
最大预行程(X-Y):5μm
最大超行程:±20(X-Y),5mm(Z)
寿命:大于100万次
3、具体配置:
MCP测头体Φ2*20
红宝石直测针3*20
红宝石直测针尖测针弯测针
测针加长杆20mm万向转头专用电缆。
雷尼绍中文说明书 山善(上海)贸易有限公司技术部一. 雷尼绍测头的标定:测头标定是矫正测头球相对主轴中心线的偏差和测头的长度误差以及探针球的半径误差。
1在以下几种情况下需要标定测头: a 第一次使用测头时。
b 测头上安装了新的探针。
c 怀疑探针弯曲或测头发生碰撞时。
d 周期性地进行标定以补偿机床的机械变化误差。
e 如果测头柄的重新定位的重复性差。
2 将已知内孔经的Master (随测头一起标定用的标准块)置于工作台且靠近主轴的一边。
a. 如图一所示用千分表将Master 沿着X 方向拉平后水平的固定在台 面上;b. 用千分表找正Master标位置(将其置于G54X- Y-中); c.在主轴上安装验棒(Testbar),移动 Z 轴并用块规测量master 的位置如图二所示 d.使w 轴在原点位置,譬如 Testbar 长度=350.311mm块规长度=30.00mm此时Z轴机械坐标为-1148.291mm (图一)(图二) e.设定标定时用的工件坐标系Z=-1148.291+(-30.0)+(-350.311)=-1528.602mm(将其置于G54Z--)f.执行T1M06(因为预先设定T01为测头专用);g.将测头安装到主轴上,擦干净测球并用千分表测量测球的跳动,如果跳动大需要重新调整(测头柄上四个方向均有调整螺丝);h.测头每次安装到主轴孔内时必须一致即不能旋转180度再安装,为了避免误差;3.完整标定测头需要O9801、O9802及其O9803或者O9804程序 标定程序依次说明:1.(O9801)测头长度的标定:格式如下:G65P9801Zz Tt;例题:在G54工件坐标系中设置X、Y、Z的值;O0001G90G80G40G0G54X0Y0G43H01Z100. (因测头通常设定为T01,激活1号补正,定位到100mm处) G65P9832 (旋转开启测头包含主轴定位)G65P9810Z10.F3000(保护定位移动)G65P9801Z0T1 (Z向标定,T1表示刀补号码)G65P9810Z100 (保护定位移动到Z100.0处)G65P9833 (旋转关闭测头)G28Z100. (参考点返回)H00 (取消刀补)M302(O9802)标定探针的X、Y方向偏心:格式:G65P9802Dd Zz上述D是表示标准块的内径值,当使用凸台标定时要使用Zz,省略时表示用孔来标定。
测头使⽤⼯作原理及雷尼绍测头快速⼊门什么是机床测头,你知道吗?什么是机床测头?机床测头是⼀种配置在数控机床上的测量设备,是⼀种科技创新型产品,其主要功能是为企业提升现有⽣产设备的制造品质,降低制造成本,节省时间及⼈⼯成本。
所以深受各⼤企业青睐。
机床测头对数控机床的作⽤:1.能⾃动识别机床精度误差,⾃动补偿机床精度2.代替⼈⼯做⾃动分中、寻边、测量,⾃动修正坐标系,⾃动⼑补3.对⼤型复杂零件在机床上直接进⾏曲⾯的测量4.能提升现有机床的加⼯能⼒和精度,⼤型单件产品在线修正⼀次完成,不再⼆次装夹返⼯修补5.⽐对测量结果并出报告6.提⾼⽣产效率、提升制造品质确保产品合格率7.降低做零件基准的制造成本及外型加⼯⼯序8.批量分中⼀次完成,⾸件调机、打样、确定⽣产⽅案⽅便快捷9.减少机床辅助时间,降低制造成本。
测头的⼯作原理,你知道吗?触发式测头的⼯作原理:在测头内部有⼀个闭合的有源电路,该电路与⼀个特殊的触发机构相连接,只要触发机构产⽣触发动作,就会引起电路状态变化并发出声光信号,指⽰测头的⼯作状态;触发机构产⽣触发动作的唯⼀条件是测头的测针产⽣微⼩的摆动或向测头内部移动,当测头连接在机床主轴上并随主轴移动时,只要测针上的触头在任意⽅向与⼯件(任何固体材料)表⾯接触,使测针产⽣微⼩的摆动或移动,都会⽴即导致测头产⽣声光信号,指明其⼯作状态。
在数控机床上采⽤测头进⾏测量的⼯作原理在数控机床上采⽤测头进⾏测量时,先将测头安装在机床的主轴上,然后操作者⼿动控制机床移动,使测头测针上的触头与⼯件表⾯接触,由于机床的数控系统实时地记录并显⽰主轴的位置坐标值,因此,可以结合测针的触头与⼯件的具体位置关系,利⽤机床主轴的坐标值换算出⼯件被测量点的相关坐标值。
获得⼯件的各个被测量点的相关坐标值以后,再根据各坐标点的⼏何位置关系进⾏相关计算,便可以获得最终的测量结果。
雷尼绍测头快速⼊门+开启信号LED指⽰灯(黄⾊)当开启信号传输⾄测头时,该LED指⽰灯将变亮。

雷尼绍探头安全操作及保养规程雷尼绍探头是一种用于测量温度和湿度的传感器,广泛应用于各种工业和实验室环境中。
本规程旨在指导用户正确使用和保养雷尼绍探头,以确保设备的安全性、可靠性和精度。
第一章:安全操作1.1 前置知识在使用雷尼绍探头前,用户需要了解以下关键知识:•温度和湿度的测量原理•各种传感器类型的区别和优缺点•探头的使用限制和技术规范•工业和实验室环境的安全标准和操作规程用户需要通过培训或自学获得这些知识,并在使用探头前检查设备和环境是否符合要求。
1.2 操作步骤1.打开探头包装箱,并检查探头是否完好无损。
2.安装探头,根据具体型号和使用场景选择合适的安装方式。
3.连接探头到测量设备,确保连接牢固。
4.对探头进行校准,校准方法请参照探头使用说明书。
5.开始进行温度和湿度的测量,记录数据并保留备份。
6.在使用完毕后,关闭设备并拔掉探头连接线。
1.3 注意事项•在使用探头前,必须确保设备和环境符合要求,以免影响探头的准确度和寿命。
•在使用探头时,必须严格按照使用说明书和技术规范操作,避免误操作和超出范围。
•在探头安装和使用过程中,必须严格遵守相关的安全标准和操作规程,确保人身安全和设备完整。
•在使用完毕后,必须及时关闭设备并拔掉探头连接线,以免发生电击或其他安全问题。
第二章:保养规程2.1 常规保养探头的常规保养包括以下方面:•定期清洁:挑选合适的清洁液体和软布,轻轻擦拭探头表面,以清除杂质和污垢。
•定期校准:根据使用频率和需要,定期对探头进行校准,以保证测量的准确性。
•定期检查:定期检查探头是否完好无损,是否存在损坏或老化的情况,如发现问题,及时更换或修理。
2.2 存储保养探头的存储保养包括以下方面:•安全存放:在不使用探头时,应将探头存放在干燥、阴凉、通风的处所,避免阳光暴晒和潮湿环境。
•防护封装:可以使用专用的防护封装将探头包裹起来,以避免受到碰撞或磨损。
•可靠备份:对于长期存储的数据,应定期进行备份,以防止数据丢失或损坏。
哈斯、雷尼绍测头探针系统使用指南VQC雷尼绍测头模板使用HAAS/雷尼绍测头可以简化测头程序,并且可以定制,包括5部分:主轴探头1-9,主轴探头10-18,刀具偏置,测头校验,帮助。
这包括最近发放哈斯机床探针(由雷尼绍制造)设置模板。
因为没有人知道如何使用,很多测头使用率低,并且说明书非常复杂。
哈斯VQC探针系统包括一个主轴探头,工具设置探头,探头接收和Renishaw软件(约49k ,9000宏)。
它大大简化了编程和设置和使用的探针。
创建的程序调出所需的宏子程序。
样板被分成4个种类显示。
因为15个类别的限制,在VQC模板中这是一个单独的程序(O09910)。
程序文件“vqcpsmei.pgm”包括42个子程序。
附带的雷尼绍软件给有编程/探头的经验的人提供了完整的探测能力。
注:帮助是一个新的类别,显示在软件更改。
如果您已经加载规则的铣床VQC模板(VQC进入方法:MDI模式下按程序键两次,选择VQC),你可以按<F2>到程序清单。
然后,您可以选择探头模板(O09996)。
注:通常有一组数目的宏用来探针。
这些都是9000系列程序。
通过选择方案9996你会得到探针模板所示。
Here you can see the five categories of the Probe Templates.If we select the first category (by pressing WRITE/ENTER) we get these templates (next slide):在测头模板中可以看到5个分类。
如果我们选择第一类(按写入/回车),我们得到这些模板(下图):This shows the templates for the first category as they appear on the LCD Monitor. Theses are Work Offset templates.They include Probe Bore, X Plus Surface, X Minus Surface, Y Plus and Minus Surface, and Z Surface, Vise (or part) Corner, Center of Block.显示器显示第一类的模板。

CNC 工具機測頭袖珍指南解決方案提升工件品質和精確度,提高 加工中心機的效率CNC 工具機測頭解決方案...袖珍指南內容本袖珍指南完整地介紹了 Renishaw 公司為 CNC 工具機而設計的主要產品,協助您加瞭解測頭量測可以為您帶來的營運效益。
“使用 Renishaw 公司提供的創新解決方案,可以縮短最多達90%的 設定時間”為什麼要使用測頭? 1使用 Renishaw 測頭量測系統的預期效益 3工件設定工件檢測刀具設定和破損刀具檢測功能強大的 PC-based 工件量測軟體支援巨集程式之測頭量測軟體產品/應用指南 5為什麼要使用測頭?時間就是金錢。
與其花時間人工手動設定工件位置和檢驗成品尺寸,不如將時間花在加工工作上。
Renishaw 測頭量測系統,可消除因手動設定及檢驗所造成的代價高昂的機器停機和工件報廢。
機器只有在持續生產良好品質的工件下,才是在創造利潤。
你有因停機而無法獲利的問題嗎?為什麼你大部分的機器會閒置達數小時?道理很簡單。
因為許多公司仍然使用人工手動方式來設定刀具和工件,並且使用機外檢驗的方式來進行加工成品尺寸之檢驗 — 兩者都是造成寶貴設備閒置的重要因素。
減少停機時間和廢品 — 增加機器加工時間和工件精度手動刀具設定、工件設定和檢測既耗時,又容易產生人為疏失。
直接在線上進行測頭量測,便不需要再使用外部的刀具設定儀、昂貴的夾治具和以槓桿千分錶進行手動設定。
線上測頭量測既快速且可靠,並且可以自動補正機械座標偏移量。
測頭量測軟體會自動對刀具長度和直徑、工件位置以及尺寸誤差進行補償。
Renishaw公司配備功能強大的套裝軟體,使用容易編輯的巨集程式進行刀具設定、工件設定和工件量測。
這些測頭量測循環程式,係依據工業標準格式編輯而成,可簡單地整合到加工程式中,並可使用標準機器程式代碼來呼叫使用。
Renishaw 公司的測頭普遍為世界各地的公司所採用,作為提升生產效率和改善工件品質的方法。
雷尼绍无线电测头RMP60的使用RMP60使用前的准备1、按原理图接线(下图仅供参考)RMP60参考接线图2、工作原理的简单说明:(1)、接收器的工作电源: 红色:直流24V ; 黑色:直流0V (2)、接收器及测头的启动使能信号: 白色:PLC 输出(24V ); 棕色:直流0V (3)、测头信号: 绿松石:直流24V ; 绿松石/黑:测头信号 (4)、屏蔽层: 黄绿色:接地 3、安装RMP60(探针、电池、刀柄、对心) 4、载入用户变量(UGUD )、renishaw 子程序(L97xx ,L98xx )RMP60调试1、RMI 、RMP 状态开启前probe status 和error 为红灯 开启后probe 和 signal 为绿灯 2、测头的开启测头的开启方式有三种:(1) 无线电开启(即通过PLC 输出信号使得RMI 接收器发出无线电指令来开启测头)。
我公司产品当选用无线电开启时,单机形式机床使用M56;TK 系列x2的机床使用M55(12008.12.10中捷机床有限公司技术部通道)M56(2通道)。
(2) 旋转开启(即将测头与刀柄连接后,装于主轴上,以要求的主轴转速开启测头)。
(3) 刀柄开关开启(即使用特殊刀柄,在刀柄上存在测头开启的开关,在测头装夹于主轴后,即可开启测头)。
如果对码不正确,则测头与接收器不能同步开启,并建立通讯。
对码过程参考第3步。
3、测头与接收器的对码步骤测头与接收器的对码步骤(1) RMI接收器断电(或者机床断电亦可)。
(2) 取出测头电池,按住测头探针,使其保持触发位置不动。
(3) 插入电池,按住测头探针不得松手,测头开始自检测,直至连续5次红色信号灯闪烁。
再松开探针。
(4) 在第一级菜单中,选择测头开启方式,以快速触发探针的方式进行开启方式的选择。
(5) 按压探针时间超过4秒,测头自动转入第二级菜单:测头关闭方式。
同样以快速触发探针的方式进行关闭方式的选择。