雷尼绍测头培训PPT课件
- 格式:pptx
- 大小:2.24 MB
- 文档页数:20

安装指南OMP40-2光学机床测头© 2009-2015 Renishaw plc 版权所有本文档未经Renishaw plc事先书面许可,不得以任何形式,进行部分或全部复制或转换为任何其他媒体形式或语言。
出版本文档所含材料并不意味着Renishaw plc 放弃对其所拥有的专利权。
雷尼绍文档编号: H-4071-8518-04-A首次发布: 2009.02修订: 2015.05前言..........................................................................1.1前言 ......................................................................1.1免责声明 ................................................................1.1商标...................................................................1.1保修...................................................................1.1设备更改 ................................................................1.1数控机床 ................................................................1.1测头的保养 ..............................................................1.1专利...................................................................1.2 EC标准符合声明............................................................1.3废弃电子电气设备 (WEEE) 指令 ................................................1.3安全须知..................................................................1.4 OMP40-2基本介绍 .............................................................2.1简介 ......................................................................2.1入门...................................................................2.1系统接口 ................................................................2.1 Trigger Logic™(触发逻辑)................................................2.2测头模式..................................................................2.2可配置的设定 ...............................................................2.2开启/关闭方式 ............................................................2.2增强型触发滤波器 .........................................................2.4光学传输模式............................................................2.4光学功率 ................................................................2.4 OMP40-2尺寸..............................................................2.6 OMP40-2规格..............................................................2.6典型电池寿命 ............................................................2.7系统安装 ......................................................................3.1安装OMP40-2与OMM-2 / OMI-2T / OMI-2H / OMI-2 / OMI / OMM ......................3.1 OMM-2 / OMI-2T / OMI-2H / OMI-2 / OMI / OMM定位 .............................3.2OMP40-2安装指南ii目录与OMM-2 / OMI-2T / OMI-2H / OMI-2 配合使用的光学信号范围(调制传输)....................3.3 OMP40-2使用前的准备工作...................................................3.3安装测针 ................................................................3.3测针弱保护杆............................................................3.4安装电池 ................................................................3.5将测头安装到刀柄上 .......................................................3.6测针对中调整............................................................3.7标定OMP40-2 ..............................................................3.8为什么要标定测头? .......................................................3.8用镗孔或车削直径进行标定.................................................3.8用环规或标准球进行标定...................................................3.8标定测头长度............................................................3.8Trigger Logic™(触发逻辑) ..................................................4.1检查测头设定 ...............................................................4.1测头设定记录 ...............................................................4.2更改测头设定 ...............................................................4.4工作模式..................................................................4.6维护..........................................................................5.1维护 ......................................................................5.1清洁测头..................................................................5.1更换电池..................................................................5.2OMP40M 系统.................................................................6.1OMP40M 系统..............................................................6.1OMP40M 尺寸..............................................................6.1OMP40M 螺钉扭矩值 .........................................................6.2OMP40-2LS 系统..............................................................7.1简介 ......................................................................7.1与OMM-2 / OMI-2T / OMI-2H / OMI-2配合使用的光学信号范围(调制传输).............7.2查错..........................................................................8.1零件清单 ......................................................................9.1前言免责声明RENISHAW已尽力确保发布之日此文档的内容准确无误,但对其内容不做任何担保或陈述。
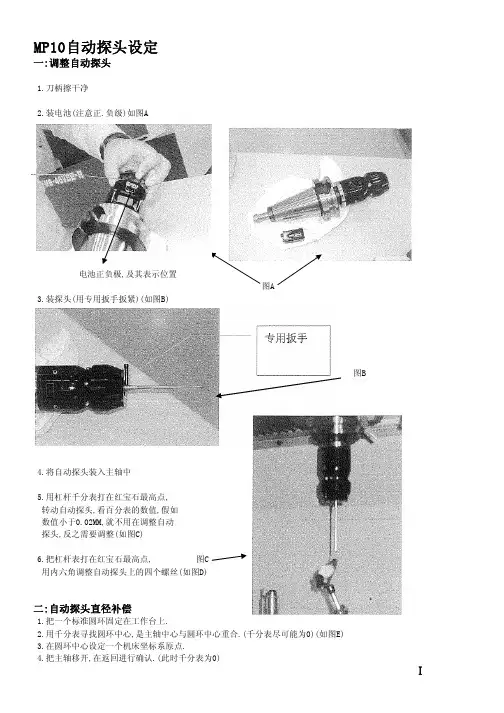
MP10自动探头设定一:调整自动探头1.刀柄擦干净2.装电池(注意正.负级)如图A电池正负极,及其表示位置图A3.装探头(用专用扳手扳紧)(如图B)图B4.将自动探头装入主轴中5.用杠杆千分表打在红宝石最高点,转动自动探头,看百分表的数值,假如数值小于0.02MM,就不用在调整自动探头,反之需要调整(如图C)6.把杠杆表打在红宝石最高点, 图C用内六角调整自动探头上的四个螺丝(如图D)二:自动探头直径补偿1.把一个标准圆环固定在工作台上.2.用千分表寻找圆环中心,是主轴中心与圆环中心重合.(千分表尽可能为0)(如图E)3.在圆环中心设定一个机床坐标系原点.4.把主轴移开,在返回进行确认.(此时千分表为0)Ⅰ调整螺丝位置图D 图E (FM MP3的调整螺丝在圆锥盖得里面)5.把自动探头放入主轴中,走到设定的原点(如图F)6.在MDI方式下,输入CALL OO18,启动.(自动探头加电,会有几秒的延时) (FMMP3输入 : CALL OO16)7.把自动探头下降到基准圆环平面以下10MM左右.8.在MDI方式下,输入CALL OO21,启动.(将设定的原点读入MSB原点)9.画面放在"测量结果显示",按"MSB原点"(MSB原点坐标,No.3号坐标系).10.输入VNCOM[1]=8,启动.11.将画面放在"测量结果显示"按"传感器",用手轻碰探头,看到传感器画面有黄色的指示灯会亮,进行信号确认,表示探头有信号.12.在MDI方式下,输入:CALL OO10 PMOD=9 PDI=50 POVT=3 启动.PMOD=9 表示自动探头半径补偿 PDI=50 表示基准环的准确直径 POVT=3表示超行程距离13.测量结果在"测量表示画面",按"MSB刀具ON/OFF"键.半径补偿的1-4号半径补偿值为探头4个方向的补偿值.14.在MDI方式下,输入:CALL OO19 启动(表示断电)(FMMP3输入:CALL OO17)三:自动探头长度方向补偿1.换基准棒.(记下标准棒的长度,假如为199.9MM)2.将基准棒的端面与量块轻微接触到(如图G).3.在此位置设定Z方向的原点.a.绝对长刀具补偿:运算199.9b.相对刀具补偿:运算04.抬起基准刀具,主轴换上自动探头.5.在MDI方式下输入:CALL OO18 启动 <VNCOM[1]=8检测信号>6.在手动方式下,将自动探头放在量块的上方,大约10MM左右(如图F).* 相对补偿,PLI=自动探头长度-基准棒长度(大概距离)9.CALL OO19 (自动探头断电)四:复制补偿数值图F1.将"MSB刀具ON/OFF"中的,半径补偿1-4号复制到5-20号,长度补偿的5号复制的1-4号.2.在MDI方式下,输入:CALL OO22 Ⅱ间距10MM左右 图G 图H使用自动探头一:内径测量1.探头放在孔的中心位置(大概),把探头的顶端移到孔内.2.MDI方式下:输入 CALL OO18 启动(FMMP3输入CALL OO16)3.测量: CALL OO10 PMOD=7 PDI=50 启动 .(PMOD=7表示测量孔德半径.PDI=50表示孔直径的预想值) 4:测量结果在"测量结果显示"中.5.设定孔中心为原点: CALL OO20 PHN=3 PX=0 PY=0 启动.(PHN=3表示为3号坐标系,PX,PY表示X与Y偏移量) 6:在MDI方式下,输入: CALL OO19 启动(FMMP3输入:CALL OO17)二:外径测量1.探头放在孔的中卫,并且在零件的上方.2.CALL OO18启动.3.测量: CALL OO10 PMOD=6 PDI=100 PIN=25 启动 (PMOD=6表示测量外径 PDI=100表示外径的预想值 PIN=25表示从探头顶端下降25mm.)4.以下操作同测内径操作.三:X向的端面测量 1.探头放在离被测平面不远的地方.2.在MDI方式下,输入: CALL OO10 PMOD=1 PEI=-255 启动 .(PEI=-255表示X向的预想值,预想值=当前位置+到被测面得距离) 3.设原点同上,设好原点后,再次确认,输入:CALL OO10 PMOD=1 PEI=0启动 PEI=0表示确认面与测量面差值为0.四:Y向端面测量1.测量:CALL OO10 PMOD=2 PEI=800 启动2.设原点和再次确认操作步骤同上.五:Z向测量.1.探头方在被测零件平面的上方.2.在MDI方式下,输入: G56H5 启动,HS=5表示MSB刀具长度补偿为五号.3.测量:CALL OO10 PMOD=3 PEI=-111 启动4.设原点和再次确认同上.六:测量两点间的距离探头放在被测量两点的大约中间位置.*X向测量:CALL OO10 PMOD=11 PELI=60 启动 *Y向测量:CALL OO10 PMOD=12 PELI=85 启动七:测量两端面的距离探头放还在被测两端面的中间,并放在零件的上面.* X向测量:CALL OO10 PMOD=11 PELI=130 PIN=30 启动* Y向测量:CALL OO10 PMOD=12 PELI=130 PIN=30 启动END Ⅲ。

引言:雷尼绍探头是一种广泛应用于科学研究和工程领域的设备,其使用可以帮助我们测量和探测各种物理和化学量。
本文旨在为使用雷尼绍探头的用户提供一份详尽的指南,以帮助他们更好地理解和使用这一设备。
概述:雷尼绍探头是一种用于测量和探测电磁场、温度、湿度等物理和化学量的设备。
它由一个探头和一个接收器组成,通过探头与被测物理量进行相互作用,然后通过接收器将获取的信号转换为可读的数据。
使用雷尼绍探头时需要注意一些关键的操作步骤和技巧,以确保测量结果的准确性。
正文内容:一、正确连接探头和接收器1.检查探头和接收器的连接接口,确保接口干净无杂质。
2.将接收器与电源和数据采集设备连接,确保接收器能够正常工作。
二、探头的校准和调试1.在使用雷尼绍探头前,需要对其进行校准,以确保测量结果的准确性。
2.根据探头的说明书,选择合适的校准方法和设备进行校准。
3.在校准过程中,注意细节,并记录下校准结果。
三、选择合适的测量参数1.根据被测量的物理量,选择合适的测量参数,如信号频率、采样率等。
2.在选择参数时,考虑被测量物理量的特性和探头的灵敏度,以保证测量结果的准确性。
四、使用探头进行实际测量1.在进行测量前,需要对被测量物体进行准备工作,如清洁、固定等。
2.将探头与被测物理量相互作用,并保持探头与被测物体的接触良好。
3.在测量过程中,注意探头的位置和动作,以避免误差的产生。
4.需要注意的是,在进行测量时,可能会受到外界环境的干扰,如电磁场、温度等,这些因素需要进行合理的控制或校正。
五、数据分析和解释1.测量完成后,将得到的数据进行分析和解释,以获取有意义的结果。
2.根据测量结果,可以进行数据处理、曲线拟合等操作,以进一步分析和解释测量数据。
3.在数据解释过程中,还需要考虑测量过程中的误差来源和对结果的影响。
总结:雷尼绍探头作为一种广泛应用的测量设备,使用正确的操作步骤和技巧可以提高测量结果的准确性。
本文从连接探头和接收器、探头的校准和调试、选择合适的测量参数、使用探头进行实际测量以及数据分析和解释等方面进行了详细阐述。
雷尼绍中文说明书 山善(上海)贸易有限公司技术部一. 雷尼绍测头的标定:测头标定是矫正测头球相对主轴中心线的偏差和测头的长度误差以及探针球的半径误差。
1在以下几种情况下需要标定测头: a 第一次使用测头时。
b 测头上安装了新的探针。
c 怀疑探针弯曲或测头发生碰撞时。
d 周期性地进行标定以补偿机床的机械变化误差。
e 如果测头柄的重新定位的重复性差。
2 将已知内孔经的Master (随测头一起标定用的标准块)置于工作台且靠近主轴的一边。
a. 如图一所示用千分表将Master 沿着X 方向拉平后水平的固定在台 面上;b. 用千分表找正Master标位置(将其置于G54X- Y-中); c.在主轴上安装验棒(Testbar),移动 Z 轴并用块规测量master 的位置如图二所示 d.使w 轴在原点位置,譬如 Testbar 长度=350.311mm块规长度=30.00mm此时Z轴机械坐标为-1148.291mm (图一)(图二) e.设定标定时用的工件坐标系Z=-1148.291+(-30.0)+(-350.311)=-1528.602mm(将其置于G54Z--)f.执行T1M06(因为预先设定T01为测头专用);g.将测头安装到主轴上,擦干净测球并用千分表测量测球的跳动,如果跳动大需要重新调整(测头柄上四个方向均有调整螺丝);h.测头每次安装到主轴孔内时必须一致即不能旋转180度再安装,为了避免误差;3.完整标定测头需要O9801、O9802及其O9803或者O9804程序 标定程序依次说明:1.(O9801)测头长度的标定:格式如下:G65P9801Zz Tt;例题:在G54工件坐标系中设置X、Y、Z的值;O0001G90G80G40G0G54X0Y0G43H01Z100. (因测头通常设定为T01,激活1号补正,定位到100mm处) G65P9832 (旋转开启测头包含主轴定位)G65P9810Z10.F3000(保护定位移动)G65P9801Z0T1 (Z向标定,T1表示刀补号码)G65P9810Z100 (保护定位移动到Z100.0处)G65P9833 (旋转关闭测头)G28Z100. (参考点返回)H00 (取消刀补)M302(O9802)标定探针的X、Y方向偏心:格式:G65P9802Dd Zz上述D是表示标准块的内径值,当使用凸台标定时要使用Zz,省略时表示用孔来标定。
测头使⽤⼯作原理及雷尼绍测头快速⼊门什么是机床测头,你知道吗?什么是机床测头?机床测头是⼀种配置在数控机床上的测量设备,是⼀种科技创新型产品,其主要功能是为企业提升现有⽣产设备的制造品质,降低制造成本,节省时间及⼈⼯成本。
所以深受各⼤企业青睐。
机床测头对数控机床的作⽤:1.能⾃动识别机床精度误差,⾃动补偿机床精度2.代替⼈⼯做⾃动分中、寻边、测量,⾃动修正坐标系,⾃动⼑补3.对⼤型复杂零件在机床上直接进⾏曲⾯的测量4.能提升现有机床的加⼯能⼒和精度,⼤型单件产品在线修正⼀次完成,不再⼆次装夹返⼯修补5.⽐对测量结果并出报告6.提⾼⽣产效率、提升制造品质确保产品合格率7.降低做零件基准的制造成本及外型加⼯⼯序8.批量分中⼀次完成,⾸件调机、打样、确定⽣产⽅案⽅便快捷9.减少机床辅助时间,降低制造成本。
测头的⼯作原理,你知道吗?触发式测头的⼯作原理:在测头内部有⼀个闭合的有源电路,该电路与⼀个特殊的触发机构相连接,只要触发机构产⽣触发动作,就会引起电路状态变化并发出声光信号,指⽰测头的⼯作状态;触发机构产⽣触发动作的唯⼀条件是测头的测针产⽣微⼩的摆动或向测头内部移动,当测头连接在机床主轴上并随主轴移动时,只要测针上的触头在任意⽅向与⼯件(任何固体材料)表⾯接触,使测针产⽣微⼩的摆动或移动,都会⽴即导致测头产⽣声光信号,指明其⼯作状态。
在数控机床上采⽤测头进⾏测量的⼯作原理在数控机床上采⽤测头进⾏测量时,先将测头安装在机床的主轴上,然后操作者⼿动控制机床移动,使测头测针上的触头与⼯件表⾯接触,由于机床的数控系统实时地记录并显⽰主轴的位置坐标值,因此,可以结合测针的触头与⼯件的具体位置关系,利⽤机床主轴的坐标值换算出⼯件被测量点的相关坐标值。
获得⼯件的各个被测量点的相关坐标值以后,再根据各坐标点的⼏何位置关系进⾏相关计算,便可以获得最终的测量结果。
雷尼绍测头快速⼊门+开启信号LED指⽰灯(黄⾊)当开启信号传输⾄测头时,该LED指⽰灯将变亮。


雷尼绍测头的应用1 绪论1.1 研究背景随着科技、生产的快速发展,测量技术日益显著。
而相当长的时间内,测量基本上是静态的,即测量对象在测量过程中不变化或没有明显变化,同时,测量大多是“离线”的,而不是“在线”的,即不是在生产制造过程中实现。
比如,对于生产,离线的静态测量只能对零部件和成品分别进行检测;而对生产加工的过程则无能为力。
如果能对生产制造过程加以检测,即进行所谓的“在线测量”,则不仅可以保证产品质量、增加产量,降低消耗、减少成本、提高效率,而且还可以随时监测甚至排除生产中的潜在问题,保证生产顺利进行。
国际上,上世纪60 年代后期开始,在机测量技术便引起了人们的关注。
这一方面是由于科技、生产和社会发展的需要,尤其是质量和效益的挑战;另一方面则是由于传感器技术、微型计算机技术、自动控制技术和图像识别技术等的进展,为在机测量的实现提供了必要的条件。
1974 年召开的第一次在机测量国际会议,进一步引起了全世界各国的普遍关注,对在机测量技术的开发与应用起了有力作用。
近年来,基于接触式、非接触式等各种测头的在机测量技术在现代工业领域被广泛应用。
触发式测头在国外发展较早,技术也都相对成熟,测头的位置坐标主要通过加工设备的控制系统存储,其精度主要取决于加工设备的定位精度。
因此,为了得到较高的测量精度,国内外的研究大多都是采用国外的数控系统和加工设备,比如:FANUC 数控系统等而随着国内加工设备的精度提升,此次采用北京精雕控制系统及其北京精雕高速雕刻中心来完成测头的在机测量研究。
对于非接触式测量方式,激光扫描法相对成熟,比如国外大多采用FANUC 数控加工中心上配激光测头,使其附加了数控测量功能,实现了三轴机床上的在机测量。
随着加工技术的飞速发展,数控机床在生产中的应用越来越广泛。
虽然机床按程序执行,但加工时间短,效率高,但工件对准、检查等辅助加工时间没有缩短,甚至占整个加工过程的1/3 以上。
面对这些问题,使用Renishaw 探头不仅避免了重复编程,节省了编程和调试时间,还具有机器测量功能,保证了机床生产和操作的可靠性,保证了产品加工尺寸精度。
雷尼绍无线电测头RMP60的使用RMP60使用前的准备1、按原理图接线(下图仅供参考)RMP60参考接线图2、工作原理的简单说明:(1)、接收器的工作电源: 红色:直流24V ; 黑色:直流0V (2)、接收器及测头的启动使能信号: 白色:PLC 输出(24V ); 棕色:直流0V (3)、测头信号: 绿松石:直流24V ; 绿松石/黑:测头信号 (4)、屏蔽层: 黄绿色:接地 3、安装RMP60(探针、电池、刀柄、对心) 4、载入用户变量(UGUD )、renishaw 子程序(L97xx ,L98xx )RMP60调试1、RMI 、RMP 状态开启前probe status 和error 为红灯 开启后probe 和 signal 为绿灯 2、测头的开启测头的开启方式有三种:(1) 无线电开启(即通过PLC 输出信号使得RMI 接收器发出无线电指令来开启测头)。
我公司产品当选用无线电开启时,单机形式机床使用M56;TK 系列x2的机床使用M55(12008.12.10中捷机床有限公司技术部通道)M56(2通道)。
(2) 旋转开启(即将测头与刀柄连接后,装于主轴上,以要求的主轴转速开启测头)。
(3) 刀柄开关开启(即使用特殊刀柄,在刀柄上存在测头开启的开关,在测头装夹于主轴后,即可开启测头)。
如果对码不正确,则测头与接收器不能同步开启,并建立通讯。
对码过程参考第3步。
3、测头与接收器的对码步骤测头与接收器的对码步骤(1) RMI接收器断电(或者机床断电亦可)。
(2) 取出测头电池,按住测头探针,使其保持触发位置不动。
(3) 插入电池,按住测头探针不得松手,测头开始自检测,直至连续5次红色信号灯闪烁。
再松开探针。
(4) 在第一级菜单中,选择测头开启方式,以快速触发探针的方式进行开启方式的选择。
(5) 按压探针时间超过4秒,测头自动转入第二级菜单:测头关闭方式。
同样以快速触发探针的方式进行关闭方式的选择。
雷尼绍凸台或键槽的测量L9812凸台或键槽的测量并设为工件零点------------L9812的应用循环L9812测量凸台或键槽工件沿X、Y方向的宽度及中心位置。
测量结果可以修正刀具补偿偏置值,也可以设定一个工件坐标系。
关于凸台:在程序指令中如果包括Z轴变量则表明是一个凸台,否则认为是一个键槽工件。
测头按程序指令移动到预设的凸台中心,而且是在工件的上方。
执行完自动测量凸台指令后,测头返回初始位置。
关于键槽:测头按程序指令移动到预设的键槽中心,并且下到一定的深度。
执行完自动测量键槽指令后,测头返回初始位置。
1、举例1:测量出一个凸台宽度为50mm的中心线坐标值,并输入到G55工件坐标系中。
步骤:1)通过换刀指令将工件测头放置在主轴上。
2)手动移动X、Y、Z轴坐标将探针放置在所测工件凸台大致中心线的位置。
3)记录当前的坐标值输入到G54中。
Z轴向上移动,离工件大约100mm。
4)在MDA或AUTO方式下输入程序:T1M6 ;将工件测头换到当前主轴上G54 G90G01X0Y0F1000 ;移动到G54坐标位置Z100 D1 ;Z轴距离凸台平面100mm,用D1刀沿。
SPOS=0 ;主轴定向到固定角度M31 ;开启测头接收L9800 ;程序清除R26 = 10 R9 = 1000 ;Z轴以1000 mm/min的速度到达安全距离L9810 ;测头保护程序R24 = 50 R26 = -10 R19 = 2 ;X轴移到凸台的外端,Z轴下深10mm,值将记录到G55中。
L9812 ;自动执行测量。
R26 = 100 ;Z轴测量完毕升到100mm处。
L9810 ;测头保护程序M32 ;关闭测头M30 ;程序结束5)步骤执行图解:。
1 绪论1.1研究背景随着科技、生产的快速发展,测量技术日益显著。
而相当长的时间内,测量基本上是静态的,即测量对象在测量过程中不变化或没有明显变化,同时,测量大多是“离线”的,而不是“在线”的,即不是在生产制造过程中实现。
比如,对于生产,离线的静态测量只能对零部件和成品分别进行检测;而对生产加工的过程则无能为力。
如果能对生产制造过程加以检测,即进行所谓的“在线测量”,则不仅可以保证产品质量、增加产量,降低消耗、减少成本、提高效率,而且还可以随时监测甚至排除生产中的潜在问题,保证生产顺利进行。
国际上,上世纪60 年代后期开始,在机测量技术便引起了人们的关注。
这一方面是由于科技、生产和社会发展的需要,尤其是质量和效益的挑战;另一方面则是由于传感器技术、微型计算机技术、自动控制技术和图像识别技术等的进展,为在机测量的实现提供了必要的条件。
1974 年召开的第一次在机测量国际会议,进一步引起了全世界各国的普遍关注,对在机测量技术的开发与应用起了有力作用。
近年来,基于接触式、非接触式等各种测头的在机测量技术在现代工业领域被广泛应用。
触发式测头在国外发展较早,技术也都相对成熟,测头的位置坐标主要通过加工设备的控制系统存储,其精度主要取决于加工设备的定位精度。
因此,为了得到较高的测量精度,国内外的研究大多都是采用国外的数控系统和加工设备,比如:FANUC 数控系统等而随着国内加工设备的精度提升,此次采用北京精雕控制系统及其北京精雕高速雕刻中心来完成测头的在机测量研究。
对于非接触式测量方式,激光扫描法相对成熟,比如国外大多采用FANUC 数控加工中心上配激光测头,使其附加了数控测量功能,实现了三轴机床上的在机测量。
随着加工技术的飞速发展,数控机床在生产中的应用越来越广泛。
虽然机床按程序执行,但加工时间短,效率高,但工件对准、检查等辅助加工时间没有缩短,甚至占整个加工过程的1/3以上。
面对这些问题,使用Renishaw探头不仅避免了重复编程,节省了编程和调试时间,还具有机器测量功能,保证了机床生产和操作的可靠性,保证了产品加工尺寸精度。