基于视差空间的双目视觉里程计
- 格式:pdf
- 大小:235.49 KB
- 文档页数:5

双目立体视觉测距原理双目立体视觉系统由两个相机组成,每个相机代表一个眼睛。
相机之间的距离通常被称为基线(baseline)。
在观察同一个目标时,两个相机会获取两个稍微不同的图像。
这是因为两个相机的位置不同,导致从不同角度观察到的目标图像有所偏移。
基于这个差异,我们可以使用视差原理来计算目标的距离。
视差是指两个眼睛在看同一个目标时,两个图像中相同物体之间的像素差异。
这个差异是由于目标在三维空间中的位置和相机的视角造成的。
我们可以通过比较两个图像的像素来计算出这个视差。
为了进行视差计算,我们首先需要进行图像配准。
这意味着将两个图像对齐,使得相同的物体在两个图像中位置相同。
这可以通过计算两个图像之间的特征点匹配来实现。
一旦图像对齐完成,我们就可以计算图像中像素之间的视差。
计算视差的常见方法是使用极线约束(Epipolar constraint)和匹配算法。
极线约束是指在双目视觉中,两个相机的对应像素点位于相应极线上。
换句话说,一个像素只能与另一个图像中相同视线上的像素匹配。
这个约束可以减少计算量并提高匹配的准确性。
匹配算法的选择取决于具体的应用需求和计算资源。
一些常见的匹配算法包括块匹配(block matching)、图像金字塔(image pyramid)和灰度共生矩阵(gray-level co-occurrence matrix)方法。
这些算法可以在图像中最佳匹配,并计算出视差值。
一旦获取了视差值,我们可以使用三角测量原理来计算目标的距离。
三角测量基于几何原理,通过知道基线长度和视差值,我们可以计算出目标的距离。
双目立体视觉测距原理有许多应用。
在工业领域,它可以用于机器人导航、三维重建和物体检测。
在医疗领域,双目视觉可以用于辅助手术和视觉康复。
在自动驾驶和无人机等领域,双目视觉可以帮助测量目标距离并进行障碍物检测。
总结起来,双目立体视觉测距原理利用两个相机观察同一目标,并计算出视差值来测量目标的距离。
基于视差的双目立体视觉人的立体感是这样建立的:双眼同时注视某物体,双眼视线交叉于一点,叫注视点,从注视点反射回到视网膜上的光点是对应的,这两点将信号转入大脑视中枢合成一个物体完整的像。
不但看清了这一点,而且这一点与周围物体间的距离、深度、凸凹等等都能辨别出来,这样成的像就是立体的像,这种视觉也叫立体视觉。
欠缺立体视觉者称为立体盲。
立体视觉是人眼在观察事物时所具有的立体感。
再进一步讲,人眼对获取的景象有相当的深度感知能力(Depth Perception),而这些感知能力又源自人眼可以提取出景象中的深度要素(Depth Cue)。
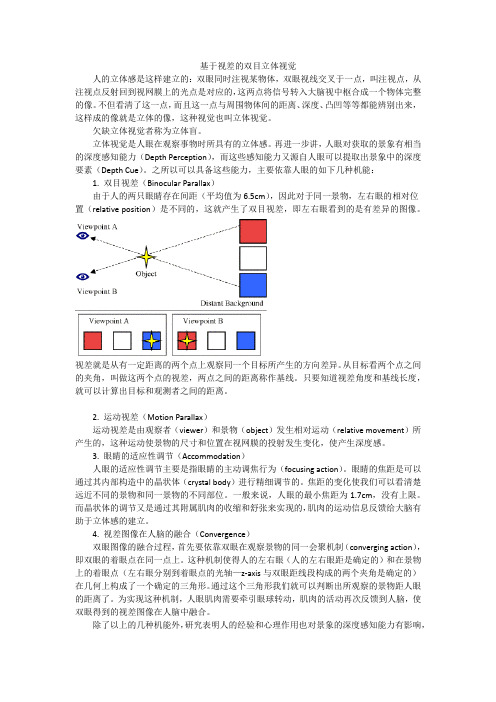
之所以可以具备这些能力,主要依靠人眼的如下几种机能:1. 双目视差(Binocular Parallax)由于人的两只眼睛存在间距(平均值为6.5cm),因此对于同一景物,左右眼的相对位置(relative position)是不同的,这就产生了双目视差,即左右眼看到的是有差异的图像。
视差就是从有一定距离的两个点上观察同一个目标所产生的方向差异。
从目标看两个点之间的夹角,叫做这两个点的视差,两点之间的距离称作基线。
只要知道视差角度和基线长度,就可以计算出目标和观测者之间的距离。
2. 运动视差(Motion Parallax)运动视差是由观察者(viewer)和景物(object)发生相对运动(relative movement)所产生的,这种运动使景物的尺寸和位置在视网膜的投射发生变化,使产生深度感。
3. 眼睛的适应性调节(Accommodation)人眼的适应性调节主要是指眼睛的主动调焦行为(focusing action)。
眼睛的焦距是可以通过其内部构造中的晶状体(crystal body)进行精细调节的。
焦距的变化使我们可以看清楚远近不同的景物和同一景物的不同部位。
一般来说,人眼的最小焦距为1.7cm,没有上限。
而晶状体的调节又是通过其附属肌肉的收缩和舒张来实现的,肌肉的运动信息反馈给大脑有助于立体感的建立。

双目测距原理范文双目测距原理是一种通过两个视觉传感器同时感知并计算物体距离的技术,类似于人类的双眼视觉系统。
该原理基于视差(disparity)的概念,即两个视觉传感器(像机)在观察到同一物体时,由于其间距,物体在两个像机中的位置不同。
根据这种差异,可以计算出物体离相机的距离。
在双目测距原理中,有两个重要的参数需要考虑:基线(baseline)和视差(disparity)。
基线是指两个摄像头(或相机)之间的距离,它们通常放置在一条直线上并且保持固定。
视差则是指同一个物体在两个摄像头中的位置差异,通过视差可以确定这个物体相对于相机的距离。
视差越大,物体离相机越近,视差越小,物体离相机越远。
1.图像采集:两个相机同时捕获场景的图像。
两个相机具有相同的参数设置,比如对焦距离、曝光时间等。
2.标定:通过标定来获取摄像机的内外参数。
内参数包括相机的焦距、主轴和镜头失配等信息。
外参数则是指相机的位置和姿态等。
3.特征提取:通过图像处理算法提取图像中感兴趣的特征点或特征区域。
这些特征点可以是物体的边缘、角点等,用于后续的匹配和测量。
4.匹配:将图像中的特征点或特征区域在两幅图像中进行匹配。
这个过程可以采用相关算法、特征描述符等来实现。
5.视差计算:通过匹配到的特征点或特征区域,计算它们在两个图像中的位置差异,即视差。
视差计算方法有多种,例如基于像素级匹配、灰度匹配等。
6.距离计算:根据视差和基线来计算物体离相机的距离。
这个计算可以采用三角测量法,即通过视差和基线的关系来计算物体距离。
基线和相机内、外参数的已知性是计算准确距离的前提。
7.距离校正:由于双目系统中两个摄像头的成像存在误差,需要对测量结果进行校正。
校正方法包括校正基线长度、校正摄像头参数等,以提高测量的准确性。

《基于双目立体视觉的测距算法研究》篇一一、引言在自动化技术、智能驾驶和机器人技术等应用领域中,精确的测距算法是关键技术之一。
双目立体视觉作为一种有效的视觉测距技术,在三维空间信息的获取中得到了广泛的应用。
本文旨在研究基于双目立体视觉的测距算法,为相关领域提供理论依据和技术支持。
二、双目立体视觉原理双目立体视觉原理基于人类双眼的视觉感知机制。
通过两个相机从不同角度获取同一场景的图像,利用图像处理技术对两幅图像进行匹配、计算视差,从而得到场景的三维信息。
双目立体视觉的测距原理主要依赖于视差计算和三角测量法。
三、双目立体视觉测距算法研究1. 算法流程基于双目立体视觉的测距算法主要包括图像获取、相机标定、图像预处理、特征提取、特征匹配和视差计算等步骤。
首先,通过两个相机获取同一场景的左右图像;然后,进行相机标定和图像预处理,包括去除噪声、灰度化等;接着,提取左右图像中的特征点;通过特征匹配算法,找到对应点对;最后,利用三角测量法计算视差,得到目标物体的深度信息。
2. 关键技术(1)相机标定:通过标定板获取相机的内外参数,为后续的图像处理提供基础。
(2)特征提取与匹配:提取左右图像中的特征点,并采用合适的匹配算法找到对应点对。
特征提取与匹配是双目立体视觉测距算法的关键步骤,直接影响测距精度。
(3)视差计算与三角测量法:根据对应点对计算视差,然后利用三角测量法得到目标物体的深度信息。
视差计算需要精确的匹配和算法优化,以提高测距精度。
四、算法优化与实验分析为了提高双目立体视觉测距算法的精度和鲁棒性,本文从以下几个方面进行了优化:1. 优化特征提取与匹配算法:采用更加稳定的特征提取与匹配算法,提高对应点对的准确性。
2. 引入机器学习与深度学习技术:利用机器学习和深度学习技术对双目立体视觉测距算法进行优化,提高算法的鲁棒性和适应性。
3. 实验分析:通过实验验证了本文提出的双目立体视觉测距算法的有效性和准确性。
实验结果表明,本文算法在各种场景下均能实现较高的测距精度。

《基于双目立体视觉的测距算法研究》篇一一、引言在现今的自动驾驶、机器人技术、以及3D计算机视觉领域,双目立体视觉测距算法以其准确度高、鲁棒性强的特点得到了广泛的应用。
本文旨在研究基于双目立体视觉的测距算法,深入探讨其原理、应用及其优缺点,并通过实验分析验证其有效性。
二、双目立体视觉原理双目立体视觉是通过模拟人类双眼的视觉过程,利用两个相机从不同角度获取同一场景的图像,再通过图像处理技术恢复出场景的三维信息。
其基本原理包括图像获取、图像校正、特征提取、立体匹配和三维重建等步骤。
三、测距算法研究基于双目立体视觉的测距算法主要分为以下几个步骤:1. 图像获取与预处理:首先,通过两个相机获取同一场景的左右图像,然后进行预处理,包括去噪、灰度化等操作,以便后续处理。
2. 特征提取与匹配:在预处理后的图像中提取特征点,如SIFT、SURF等算法。
然后,通过立体匹配算法找到对应点,如基于区域的匹配算法、基于特征的匹配算法等。
3. 计算视差:通过立体匹配得到的对应点计算视差,即同一物体在不同相机图像中的位置差异。
视差反映了物体在空间中的深度信息。
4. 深度信息恢复与测距:根据视差和双目相机的基线距离计算深度信息,从而得到物体的三维坐标。
再结合相关算法计算得到物体与相机的距离。
四、算法优化与改进为了提高测距精度和鲁棒性,可以采取以下措施对算法进行优化和改进:1. 优化特征提取与匹配算法:采用更先进的特征提取与匹配算法,如深度学习算法等,提高匹配精度和速度。
2. 引入约束条件:利用先验知识或已知信息引入约束条件,如顺序一致性约束、极线约束等,以减少错误匹配的概率。
3. 深度学习算法的融合:将深度学习算法与双目立体视觉测距算法相结合,通过大量数据训练得到更准确的模型。
4. 多重校正技术:在图像获取阶段引入多重校正技术,以消除相机之间的几何畸变和光畸变等影响测距精度的因素。
五、实验分析本文通过实验验证了基于双目立体视觉的测距算法的有效性。

双目视觉测距国内外研究综述一、引言双目视觉测距是计算机视觉领域的重要研究方向之一,它通过模拟人类双眼来获取场景的深度信息。
双目视觉测距技术在机器人导航、三维重构、智能交通等领域具有广泛的应用前景。
本文将对国内外双目视觉测距的研究进行综述,以期全面、详细、完整地探讨该主题。
二、双目视觉测距原理双目视觉测距原理基于视差的概念,即两个摄像机观察同一场景时,由于视点的差异,同一物体在两个图像中的位置会有所偏移。
通过计算这个偏移量,可以推导出物体到摄像机的距离。
2.1 视差计算方法视差计算方法可以分为基于特征点的方法和基于区域的方法。
2.1.1 基于特征点的方法基于特征点的方法通过提取图像中的特征点,如角点、边缘等,计算特征点在两个图像中的视差,从而得到深度信息。
常用的算法有SIFT、SURF、ORB等。
2.1.2 基于区域的方法基于区域的方法将图像划分为若干个区域,然后计算这些区域的视差。
常见的算法有块匹配、全局优化等。
2.2 双目标定双目标定是双目视觉测距的前提,它的目标是确定两个摄像机之间的几何关系。
常用的双目标定方法有张正友标定法、Tsai标定法等。
三、国内双目视觉测距研究国内在双目视觉测距方面的研究取得了很多进展,以下是其中的几个重要研究成果。
3.1 XXX方法XXX方法是一种基于特征点的双目视觉测距方法,它通过提取图像中的关键点,并利用这些关键点的视差信息计算深度。
该方法在实验中取得了较好的测距精度。
3.2 XXX方法XXX方法是一种基于区域的双目视觉测距方法,它将图像划分为多个区域,并利用区域间的视差信息计算深度。
该方法在复杂场景中表现出较好的鲁棒性。
3.3 XXX方法XXX方法是一种结合了特征点和区域的双目视觉测距方法,它通过提取图像中的关键点和区域,综合利用它们的视差信息计算深度。
该方法在复杂光照条件下具有较好的稳定性。
四、国外双目视觉测距研究国外在双目视觉测距方面也有很多杰出的研究成果,以下是其中的几个代表性研究。
《基于双目立体视觉的测量技术研究》一、引言双目立体视觉技术在测量领域有着广泛的应用,特别是在需要精确获取物体三维信息的场合。
通过模拟人眼双目视觉原理,双目立体视觉技术能够有效地捕捉并处理三维空间信息,从而实现对物体形状、尺寸、位置等参数的精确测量。
本文将探讨基于双目立体视觉的测量技术的研究现状、原理、方法及实际应用。
二、双目立体视觉测量技术原理双目立体视觉测量技术基于视差原理,通过模拟人眼双目视觉过程,利用两个相机从不同角度获取同一物体的图像信息。
通过对两幅图像进行特征提取、匹配、三维重建等处理,从而得到物体的三维空间信息。
该技术主要包括图像获取、图像预处理、特征提取与匹配、三维重建等步骤。
三、双目立体视觉测量技术方法1. 图像获取与预处理:利用两个相机从不同角度获取同一物体的图像信息,并进行预处理,如去噪、灰度化、二值化等,以提高后续处理的准确性。
2. 特征提取与匹配:在预处理后的图像中提取特征点或特征线,然后通过算法进行特征匹配,得到对应点或线的匹配关系。
3. 三维重建:根据特征匹配结果,结合相机参数及三角测量原理,进行三维重建,得到物体的三维空间信息。
四、双目立体视觉测量技术研究现状目前,双目立体视觉测量技术在国内外均得到了广泛的研究和应用。
在算法方面,研究者们不断提出新的特征提取、匹配及三维重建算法,以提高测量的精度和效率。
在应用方面,双目立体视觉测量技术已广泛应用于工业检测、医疗诊断、无人驾驶、虚拟现实等领域。
五、双目立体视觉测量技术的优势与挑战优势:1. 精度高:双目立体视觉测量技术能够精确获取物体三维空间信息,具有较高的测量精度。
2. 灵活性强:该技术适用于各种复杂环境下的测量任务,具有较好的灵活性和适应性。
3. 非接触式测量:双目立体视觉测量技术为非接触式测量,不会对被测物体造成损伤。
挑战:1. 算法复杂度高:双目立体视觉测量技术涉及到的算法较为复杂,需要较高的计算能力和处理速度。
双目视觉测距原理同样,双目视觉测距系统中的两个摄像头也被安装在两个不同的位置,具有一定的视差。
当两个摄像头同时拍摄同一物体时,每个摄像头会得到一个二维图像,其中包含关于物体在摄像头视场中的位置信息。
在双目视觉测距系统中,首先需要进行摄像头标定以确定摄像头之间的几何关系和内部参数。
通过摄像头标定,可以得到摄像头的焦距、主点、畸变系数等参数。
然后,在图像处理过程中,需要识别和匹配摄像头图像中的特征点。
一般来说,特征点可以是一些突出的角点、边缘点或纹理点等。
通过对图像中的特征点进行匹配,可以计算出两个摄像头图像中同一特征点在像素坐标系中的位置差异。
接下来,需要计算特征点对应的实际世界坐标。
这可以通过摄像头的几何参数和特征点在摄像头坐标系中的位置来实现。
一旦得到了特征点的像素坐标和实际世界坐标,就可以计算出特征点对应的视差(即两个摄像头视角中的像素位置差异)。
通过视差,可以使用三角测量得到物体的深度信息。
在测量过程中,通常需要考虑一些误差源,如摄像头标定误差、特征点匹配误差和视差计算误差等,以提高测量精度。
然而,双目视觉测距系统也存在一些局限性。
首先,该方法对于难以提取特征点的表面材质较为困难。
此外,摄像头之间的基线距离越大,测量的深度范围就越大,但相应的对于近距离物体的测量精度会降低。
总结而言,双目视觉测距原理是一种基于摄像头视差的三维视觉测量方法,通过计算两个摄像头图像中物体位置的差异来测量物体距离。
它可以实现非接触式测量,提供相对准确的距离测量结果,但对于难以提取特征点的表面材质较为困难,并且受摄像头基线距离和测量精度的影响。