某车载雷达天线俯仰机构的分析计算
- 格式:pdf
- 大小:206.43 KB
- 文档页数:5
雷达方位角和俯仰角计算雷达是一种用于探测目标位置和运动的仪器,它通过测量目标的方位角和俯仰角来确定其相对于雷达站的位置。
在本文中,我将详细介绍雷达方位角和俯仰角的计算方法。
首先,方位角是雷达站与目标之间连线的水平角度,也称为方位角。
方位角通常以北方向为基准,逆时针方向增加,范围是0到360度。
方位角的计算方法如下:-假设雷达站的位置为(Ax,Ay),目标的位置为(Bx,By)。
- 首先,计算目标相对于雷达站的坐标差值:dx = Bx - Ax,dy = By - Ay。
- 然后,计算方位角:angle = atan2(dy, dx),其中atan2是一个数学函数,用于计算向量的角度。
-最后,根据实际情况,将方位角转换为0到360度的范围。
接下来,俯仰角是雷达站与目标之间连线的垂直角度,也称为仰角。
俯仰角通常以水平面为基准,向上方向增加,范围是-90到90度。
俯仰角的计算方法如下:-假设雷达站的高度为Ah,目标的高度为Bh。
- 首先,计算目标相对于雷达站的高度差值:dh = Bh - Ah。
- 然后,计算俯仰角:elevation = atan2(dh, distance),其中distance为雷达站到目标的水平距离。
-最后,根据实际情况,将俯仰角转换为-90到90度的范围。
以上是计算雷达方位角和俯仰角的基本方法。
然而,在实际应用中,可能还需要考虑其他因素,如雷达站的高度、目标的运动速度等。
此外,由于雷达测量存在一定的误差,还需要进行校正和滤波处理,以提高数据的准确性。
在雷达系统中,方位角和俯仰角的计算是非常重要的,它们是确定目标位置和运动方向的关键参数。
通过对雷达返回的信号进行处理和分析,可以根据方位角和俯仰角来确定目标的水平和垂直位置,从而实现雷达的目标探测和跟踪功能。
雷达方位角和俯仰角的计算方法是基础的数学知识,在雷达领域有着广泛的应用。
正是因为方位角和俯仰角的存在,雷达能够精确地定位目标,并提供有效的目标跟踪和监测功能。
一种雷达目标俯仰角判定方法梁波;孙双锁;俞万友【摘要】毫米波雷达在ADAS系统中广泛应用,针对ADAS系统车载雷达需要实现俯仰检测这一需求,本文在不明显增加运算量的前提下,提出了一种新的基于天线俯仰宽窄波设计的俯仰判定方法.该方法原理简单,实现方便,在不影响方位测角的情况下使雷达具备俯仰判定能力.暗室数据和道路测试数据验证了算法的有效性.【期刊名称】《汽车电器》【年(卷),期】2019(000)004【总页数】4页(P24-27)【关键词】车载雷达;俯仰角判定;多基线比相【作者】梁波;孙双锁;俞万友【作者单位】华域汽车系统股份有限公司,上海200041;华域汽车系统股份有限公司,上海200041;华域汽车系统股份有限公司,上海200041【正文语种】中文【中图分类】U463.6751 引言高级驾驶辅助系统(Advanced Driver Assistance System,ADAS),是利用安装于车上的雷达、摄像头等传感器采集周边环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术[1]。
雷达作为ADAS中最重要的传感器之一,由于它的高穿透、全天候、低成本等特性,受到了广泛研究和大规模应用。
车载雷达通常会被安装在车辆不同的位置以适应不同的应用场景。
雷达通过对周围目标进行距离、速度、角度等测量来实现对周边环境和运动目标的感知。
其中,目标角度的检测比较关键。
在角度测量中,传统的汽车雷达只进行方位角测量而不进行俯仰角测量。
前向雷达和前角雷达作为安装在车辆前方的雷达,可以具备对自车前方和前侧方车辆和行人的稳定跟踪以及ACC[2]、AEB[3]、FCTA等功能。
由于安装在前方,为了防止在车辆行进时对前方路牌和地面低矮目标(如窨井盖、减速带等)的误检测,雷达需要具备俯仰测角能力,否则,将造成ACC/AEB系统的误触发,影响用户体验,甚至造成后车碰撞的危险。
创新实验课作业报告姓名: 王紫潇苗成国学号:1121830101 1121830106专业:飞行器环境与生命保障工程课题一双轴驱动机构转角到天线波束空间指向课题意义:随着科学技术的迅猛发展,特别是航天科技成果不断向军事、商业领域的转化,航天科技得到了极大的发展,航天器机构朝着高精度、高可靠性的方向发展。
因此对航天机构的可靠性、精度、寿命等要求越来越高,对航天器机构精度的要求显得愈发突出,无论是航天器自身的工作,还是航天器在轨服务都对其精度有着严格的要求。
航天器中的外伸指向机构通常指的是星载天线机构,星载天线是航天器对地通信的主要设备,肩负着对地通信的主要任务,同时随着卫星导航的广泛应用,星载天线就愈发的重要起来,而其指向精度的要求就愈发的突出,指向精度不足,将会导致通信信号质量下降,卫星导航精度下降等结果。
民用方面移动通信和车载导航等,军用方面舰船导航、精确打击等这些都对星载天线的指向精度有着极高的依赖性。
因此,星载天线的指向精度是非常重要的。
要保证星载天线的指向精度,首先就是要确保星载天线驱动机构在地指向精度分析的正确性,只有这样才能对接下来的在轨指向精度分析和指向误差补偿进行分析.星载天线驱动机构的末端位姿误差主要来源于机构的结构参数误差和热变形误差,这些误差是驱动机构指向误差最原始的根源,由于受实际生产加工装配能力和空间环境的限制,这些引起末端指向误差的零部件结构参数误差是必须进行合理控制的,引起结构参数变化的热影响因素是必须加以考虑的,只有这样才能使在轨天线驱动机构指向精度动态分析和误差补偿都得到较理想的结果。
纵观整个星载天线驱动机构末端位姿误差的分析,提出源于结构参数误差和热变形误差引起的星载天线驱动机构末端位姿误差的研究是必要的。
发展现状:星载天线最初大多是以固定形式与卫星本体相连的,仅仅通过增大天线波束宽度和覆盖面积来提高其工作范围,对其精度要求不是很高,但是随着航天科技的不断发展和市场需求的不断变化,这就要求,星载天线要具备一定的自由度,因此促使了星载天线双轴驱动机构的发展。
雷达天线俯仰机构职能说明雷达天线俯仰机构是一种用于调节雷达天线俯仰角度的装置,主要职能是实现雷达系统的目标探测和跟踪功能。
下面将对雷达天线俯仰机构的职能进行详细说明。
首先,雷达天线俯仰机构的主要职能是控制雷达天线的俯仰角度。
雷达系统需要将天线的波束指向目标,通过调整俯仰角度使得雷达系统能够扫描到所需区域的目标。
俯仰机构可以根据雷达系统的要求,实时调整天线的俯仰角度,以实现目标的发现和跟踪功能。
其次,雷达天线俯仰机构需要具备快速、准确的定位能力。
在雷达系统中,天线的俯仰角度可能需要频繁调整,因此俯仰机构需要具备快速调节的能力。
同时,对于目标的精确定位也是俯仰机构的职责之一,确保天线能够准确指向目标,以获得准确的目标信息。
除了俯仰角度的调节和定位功能外,雷达天线俯仰机构还需要具备稳定性和抗干扰能力。
在雷达系统工作过程中,天线需要承受各种复杂的环境影响,如风力、振动等,因此俯仰机构需要具备足够的稳定性,确保天线在各种环境下能够保持稳定的俯仰角度。
同时,俯仰机构还需要具备一定的抗干扰能力,能够抵抗外界的干扰信号,确保雷达系统能够正常工作。
此外,雷达天线俯仰机构还需要具备一定的自动化控制能力。
在现代雷达系统中,通常需要实现自动控制,通过与其他子系统的联动,实现雷达系统的自主工作。
俯仰机构需要具备与雷达系统其他子系统的接口,实现自动控制功能,以提高雷达系统的工作效率和准确性。
总之,雷达天线俯仰机构作为雷达系统中重要的组成部分,其主要职能是实现雷达系统的目标探测和跟踪功能。
通过俯仰机构的调节和定位功能,可以实现雷达天线波束的精确定位;同时,通过稳定性和抗干扰能力的提升,可以确保雷达系统在各种复杂环境下的正常工作;此外,俯仰机构还需要具备自动化控制能力,与其他子系统联动,实现雷达系统的自主工作。
这些职能的实现,为雷达系统的高效运行提供了坚实的支持。
一例雷达俯仰跳变故障的分析与处理摘要:雷达俯仰或方位数据跳变故障对技术保障人员来说是再平常不过的小问题,但如果持续时间长,又难以判断则是非常棘手的事。
本文针对一例俯仰数据跳变故障的查找,分析判断、处理过程,总结所走过的弯路过程供同行们参考。
关键词:雷达;俯仰跳变;故障;分析;处理引言:乌鲁木齐CINRAD/CC(以下简称CC)雷达曾多次出现俯仰跳变故障,从初期的单纯俯仰角度指示跳变,进而发展到体扫文件中缺层或某一层异常等情况。
经过技术人员的努力最终使故障排除。
现将故障作一技术总结。
1.俯仰跳变故障现象:(1)雷达在执行规定观测模式下,终端界面上有时出现低仰角层俯仰角度跳变,从表面现象看跳变是俯仰角度执行到某一规定层后,出现稳定时间偏长。
(2)终端软件实时体扫界面无异常图像,但检查历史体扫文件(资料反演系统)时可发现:雷达正常时每小时体扫文件通常是10个左右,单个体扫文件间隔时间约为5~6分钟。
出现故障时体扫文件数减少到8个或以下,单个体扫文件间隔会出现大于7分的现象。
异常文件如:图1ab图1.异常图像a 异常图像b2.故障分析以上故障的出现我们从以下几方面进行了分析判断:2.1基数据文件正常,终端处理软件出现错误导致图像异常2.2伺服控制板故障导致数据跳变2.3伺服R/D板故障导致数据跳变2.4伺服R/D板功率器件衰老导致数据不稳定跳变2.5俯仰系统定位误差偏大,出现上下层数据叠加3.故障检查排除过程3.1通过观察终端监控微机与主微机均有数据跳变现象,可以排除因终端软件引起的数据跳变;3.2用替换法对伺服分机插件进行更换。
如:①单独更换俯仰R/D板;②俯仰R/D板与方位R/D板对调;③更换伺服控制板。
3.3按照通常的俯仰故障处理经验,我们又选择了清洗汇流环,调整配重等维护调整方法进行尝试,结果出现了短暂的稳定期,故障依旧;3.4为了检验俯仰机械配合间隙是否超标,我们检查了定位精度,绝大部分数据均符合技术要求。
天线方位角-俯仰角以及指向计算创新实验课作业报告姓名:王紫潇苗成国学号:1121830101 1121830106专业:飞行器环境与生命保障工程课题一双轴驱动机构转角到天线波束空间指向课题意义:随着科学技术的迅猛发展,特别是航天科技成果不断向军事、商业领域的转化,航天科技得到了极大的发展,航天器机构朝着高精度、高可靠性的方向发展。
因此对航天机构的可靠性、精度、寿命等要求越来越高,对航天器机构精度的要求显得愈发突出,无论是航天器自身的工作,还是航天器在轨服务都对其精度有着严格的要求。
航天器中的外伸指向机构通常指的是星载天线机构,星载天线是航天器对地通信的主要设备,肩负着对地通信的主要任务,同时随着卫星导航的广泛应用,星载天线就愈发的重要起来,而其指向精度的要求就愈发的突出,指向精度不足,将会导致通信信号质量下降,卫星导航精度下降等结果。
民用方面移动通信和车载导航等,军用方面舰船导航、精确打击等这些都对星载天线的指向精度有着极高的依赖性。
因此,星载天线的指向精度是非常重要的。
要保证星载天线的指向精度,首先就是要确保星载天线驱动机构在地指向精度分析的正确性,只有这样才能对接下来的在轨指向精度分析和指向误差补偿进行分析。
星载天线驱动机构的末端位姿误差主要来源于机构的结构参数误差和热变形误差,这些误差是驱动机构指向误差最原始的根源,由于受实际生产加工装配能力和空间环境的限制,这些引起末端指向误差的零部件结构参数误差是必须进行合理控制的,引起结构参数变化的热影响因素是必须加以考虑的,只有这样才能使在轨天线驱动机构指向精度动态分析和误差补偿都得到较理想的结果。
纵观整个星载天线驱动机构末端位姿误差的分析,提出源于结构参数误差和热变形误差引起的星载天线驱动机构末端位姿误差的研究是必要的。
发展现状:星载天线最初大多是以固定形式与卫星本体相连的,仅仅通过增大天线波束宽度和覆盖面积来提高其工作范围,对其精度要求不是很高,但是随着航天科技的不断发展和市场需求的不断变化,这就要求,星载天线要具备一定的自由度,因此促使了星载天线双轴驱动机构的发展。
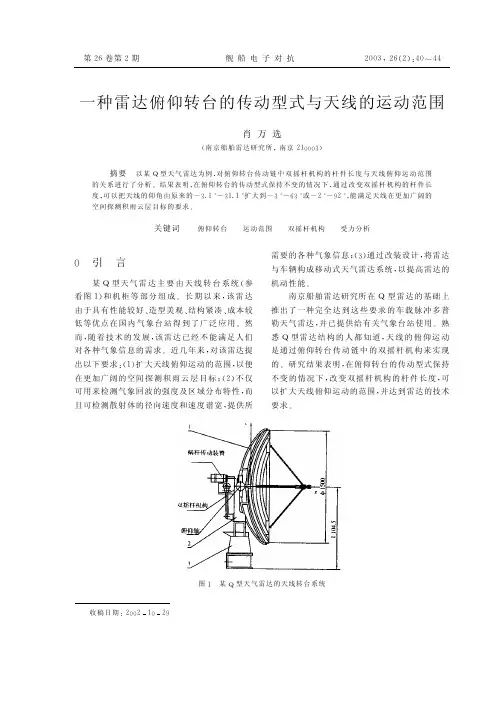
第36卷第4期2020年8月电4机械,牙?Electro-M echanical Engineering•结构设计•DOI: 10.19659/j.issn.l008-5300.2020.04.001某车载雷达俯仰平衡机构设计+严荣军(中国电子科技集团公司第二十研究所,陕西西安710068)摘要:为实现某车载雷达天线阵面在运输状态和工作状态下的俯仰翻转功能,设计了俯仰平衡机构。
扭簧和 四连杆相结合的力矩平衡机构平衡天线阵面的重力矩,蜗轮蜗杆与俯仰电机等结合的锁定及驱动机构实现对天 线阵面的位置锁定及翻转驱动。
对扭簧和四连杆的结构设计及分析表明,力矩平衡机构能够平衡天线阵面的重 力矩,从而使得锁定及驱动机构承载较小,能够满足翻转机构的轻量化、快速响应性和易维护性等设计要求。
关键词:车载雷达;俯仰平衡机构:结构设计中图分类号:TN957.2 文献标识码:A文章编号:1008-5300(2020)04-0001-04D esign o f P itch B alance M echanism o f a V eh icle-m ou nted R adarYAN Rongjun{The 2Qth Research Institute of CETC^XVan 710068, China)Abstract: In order to achieve the pitch switching function of the antenna array of a vehicle-mounted radar at transportation status and working status,a pitch balance mechanism is designed.The torque balancing mechanism combining torsion spring and four-bar linkage balances the gravity torque of antenna array.The lock and drive mechanism combining worm &worm gear and pitch motor realizes the position locking and switch drive of antenna array.The structural design and analysis of the torsion spring and the four-bar linkage indicate that the torque balancing mechanism can balance the gravity torque of antenna array,which makes the lock and drive mechanism bear less load.The design requirements of the pitch switching mechanism,such as lightweight,quick response and easy maintenance are satisfied.Key words: vehicle-mounted radar;pitch balance mechanism;structural design引言由于运输高度的限制,一般要求车载雷达天线阵 面具有翻转功能。
2021.14科学技术创新某地面雷达结构总体设计郭向东(中国电子科技集团公司第三十八研究所,安徽合肥230088)随着技术发展和当代战争日益现代化和信息化,对先进的地面高机动雷达的需求也日趋增强。
地面雷达系统集成化设计是在满足雷达系统威力和精度的基础上,设计出高集成、高可靠的结构形式是结构总体设计顶层考虑的关键点之一[1,2]。
本文根据总体设计指标要求,从顶层设计出发,在满足系统运输要求、工作状态稳定性和刚强度要求等前提条件下,通过合理的布局和系统设计,将天线系统集成在一个工作平台上。
具有集成度高、精度高、可靠性高等特点,可满足实际需求。
1雷达设计指标及参数1.1阵面口径:6.5m ×2.5m ;1.2运动范围:方位≤-170°~+170°,俯仰≤0°~90°;1.3调平精度:≤±6′;1.4抗风能力:≤13.8m/s (保精度工作),≤25m/s (不破坏);1.5架设时间:≤30min/4人;1.6运输方式:可移动,满足公路运输。
2结构总体设计雷达整机由1个天线系统单元、1个电子方舱组成。
天线系统单元是整个雷达系统的核心部分,其结构总体设计除了满足基本的电性能指标外,还需要结合平台选择、运输兼容性、架设撤收时间、整机外形尺寸、重量和成本等重要指标协同考虑,以其达到最优的布局效果和用户适用性。
一般来说,天线系统单元总体布置原则为:2.1天线下边缘离地面尽可能高,以减少地物遮挡,且自身其他设备对其无遮挡;2.2天线处工作状态时,其重心应尽可能靠近转台的回转中心;2.3设备位置应保证操作方便和维修可达性,系统集成度尽可能高,整体布局美观协调;2.4整机的运输尺寸应符合GJB2948-97《运输装载尺寸与重量限制》规定的基本尺寸要求,以满足研制总要求提出的公路、铁路、空运和海运等多种运输方式。
根据以上布局原则,该雷达天线系统单元主要设备布局如图1所示。
创新实验澡作业报告:王紫浦苗成国学号:1121830101 1121830106专业:飞行器环境与生金保障工程课題一双轴驱动机构转角到天线渋東空间指向课題意义:I®着科学技术的也猛发展,特别是航天科技成果不Bfi向军事、商业领域的转化,航天科技得到了18大的发展,航天器机枸邨着高精度、高可靠11的方向发展。
因此対航天机梅的可靠性、精度、寿金等要求強来強高,对航天器HI构精度的要求显得愈发突出,无论是航天器自身的工作,还是航天器在珈服务都对其精度有着严格的要求。
肮天器中的外伸指向机构通常焉的是星我天线机枸,星载天线是航天器对地通信的主要设备,II负着对地通信的主要任务,同时18着卫星导航的广泛应用,星裁天线就愈发的重要起来,而其指向精度的要求就愈发的突岀,指向蒂度不足,将会导致通信信号质量下降,卫星导航精度下降等结果。
民用方面移动通信和车载导航等,军用方面18餡导肮、精确打击等这些都对星我天线的指向精度有着板高的依赖性。
因此,星载天线的指向精度是非常重要的。
要保证星教天线的指向ft®, 首先就是要确保星教天线驱动机构在地指向精度分折的正确性,只有这样才能对接下来的在孰指向精HE分桥和指向淚差补偿进行分桥。
星载天线驱动机枸的末曙位姿误差主要来源于机沟的结沟参数误差和热变形误差,这些炭差是驱动机沟指向淚差最原始的根源,由于受实际生产加工装配能力和空间坏境的限制,这些引起末常指向误差的零部件结构参数淚差是必须进行合理腔制的,引起结沟参数变化的热影响因素是必须加以考虑的,只有这样才能使在珈天线驱动机枸指向精度动态分析和锲差补偿亂得到较理想的结果。
纵现整个星载天线驱动机构末竭位姿误差的分折,提岀源于结沟参数误差和热变形误差引起的星我天线驱动机构末常位姿误差的研究是必要的。
发展现状:星裁天SEffl大名是以固定形式与卫星本It相连的,仅仅通过增大天线波東宽度和覆盖面枳来提高其工作范围,对其精度要求不是很高,(0是I®着航天科技的不斷发展和市场需求的不斷变化,这就要求,星裁天线要具备一定的自由度,因此促使了星我天线双轴驱动机构的发展。
万方数据
万方数据
万方数据
万方数据
某车载雷达天线俯仰机构的分析计算
作者:牛永生
作者单位:西安导航技术研究所
刊名:
电子机械工程
英文刊名:ELECTRO-MECHANICAL ENGINEERING
年,卷(期):2001(2)
1.濮良贵;纪名刚机械设计 1998
2.曾余庚雷达天线的风荷 1973
3.叶尚辉;李在贵天线结构设计 1986
4.龚振邦电子设备机械设计 1985
1.颜长锋.傅卫平.朱育刚.YAN Chang-feng.FU Wei-ping.ZHU Yu-gang某大型雷达天线俯仰机构的设计[期刊论文]-电子机械工程2008,24(3)
2.牛永生某车载雷达天线俯仰机构的分析计算[会议论文]-2000
3.袁海平雷达天线座V型支臂的刚度设计[期刊论文]-电子机械工程2000(2)
4.王若谷风的地形效应及对雷达载荷的影响[会议论文]-2002
5.房建斌机动式车载雷达稳定性设计分析[会议论文]-2003
6.伊英红.李向阳.YI Ying-hong.LI Xiang-yang抛落式工作球磨机功率计算[期刊论文]-有色矿冶2009,25(2)
7.张秉公.许平勇.曹鹏举.ZHANG Bing-gong.XU Ping-yong.CAO Peng-ju基于DSP的机动雷达天线卸风载控制系统设计[期刊论文]-空军雷达学院学报2007,21(4)
8.魏忠良.WEI Zhong-liang某雷达阵面倒竖机构力学计算与优化[期刊论文]-电子机械工程2008,24(3)
9.王文龙.蔡敢为电动机-曲柄滑块机构系统的动态分析耦联方程[期刊论文]-机械与电子2002(6)
10.伍勇军.肖佩.杨红军.WU Yong-Jun.XIAO PEI.YANG Hong-Jun基于ABAQUS的车载雷达天线模态分析[期刊论文]-机械2007,34(11)
本文链接:/Periodical_dzjxgc200102013.aspx。