雷达天线俯仰机构
- 格式:doc
- 大小:75.50 KB
- 文档页数:1
雷达天线俯仰机构课程设计一、课程目标知识目标:1. 学生能理解雷达天线的基本构成,特别是俯仰机构的功能和重要性。
2. 学生能够掌握雷达天线俯仰机构的原理,包括其工作方式和影响因素。
3. 学生能够描述不同类型雷达天线俯仰机构的优缺点及适用场景。
技能目标:1. 学生能够通过实际操作或模拟软件,对雷达天线俯仰机构进行基本的调整和控制。
2. 学生能够运用所学的知识,分析和解决雷达天线俯仰机构在运行中可能遇到的问题。
3. 学生能够设计简单的俯仰机构模型,展示其功能和操作流程。
情感态度价值观目标:1. 培养学生对雷达技术及天线设计的兴趣,激发其探索精神和创新意识。
2. 强化学生的团队合作意识,通过小组合作完成俯仰机构的设计和操作任务。
3. 引导学生认识到科技发展对国防和民用领域的重要性,培养其爱国情怀和社会责任感。
课程性质:本课程为高二年级电子技术及应用课程的一部分,以实践性和探究性为主要特点。
学生特点:高二学生已具备一定的物理基础和电子技术知识,对实际操作和新技术具有浓厚兴趣。
教学要求:结合学生特点,课程注重理论与实践相结合,鼓励学生主动探索和动手实践,通过直观教学和案例分析,使学生在实践中掌握知识,提升技能。
目标是使学生能够将所学知识应用于实际问题的解决,培养其综合技术素养。
二、教学内容本课程依据课程目标,紧密结合教材,组织以下教学内容:1. 雷达天线基本构成及俯仰机构功能:通过教材第二章“雷达天线的基本构成与分类”内容,让学生了解天线的基本构成,重点讲解俯仰机构的功能及其在雷达系统中的作用。
2. 雷达天线俯仰机构原理:结合教材第三章“雷达天线的原理与应用”,详细讲解俯仰机构的原理,包括其工作方式、影响因素及调整方法。
3. 不同类型雷达天线俯仰机构分析:参照教材第四章“雷达天线俯仰机构的设计与优化”,分析各种俯仰机构的优缺点及适用场景。
4. 实际操作与案例分析:依据教材第五章“雷达天线俯仰机构的实际应用”,安排学生进行实际操作,通过模拟软件或实际设备,掌握俯仰机构的调整和控制方法。
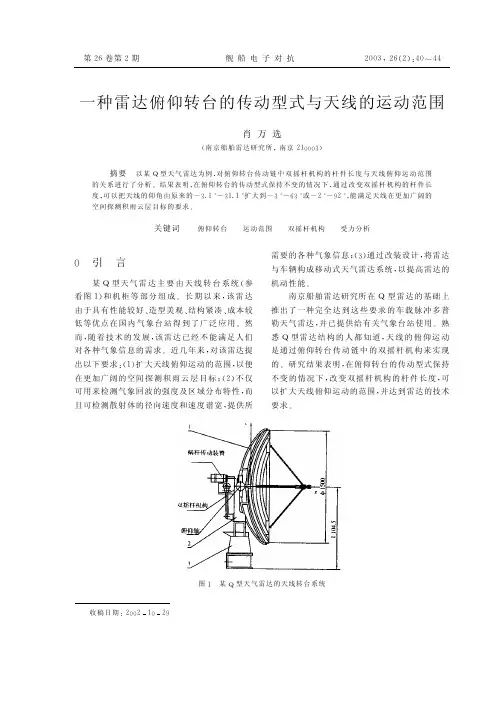
雷达天线俯仰机构职能说明雷达天线俯仰机构是一种用于调节雷达天线俯仰角度的装置,主要职能是实现雷达系统的目标探测和跟踪功能。
下面将对雷达天线俯仰机构的职能进行详细说明。
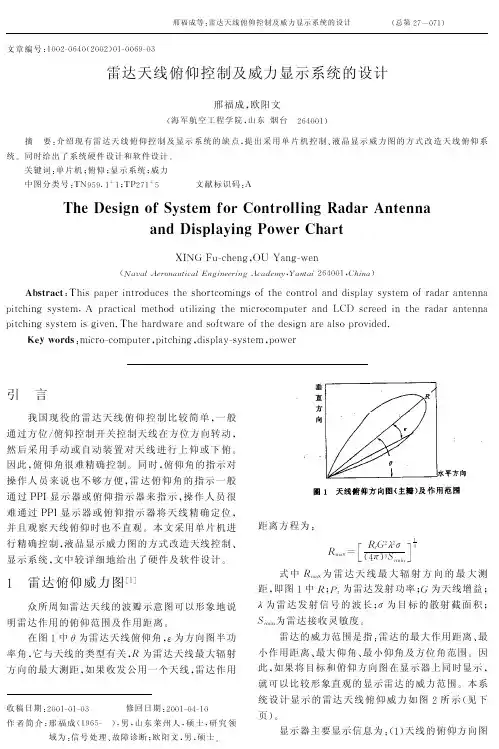
首先,雷达天线俯仰机构的主要职能是控制雷达天线的俯仰角度。
雷达系统需要将天线的波束指向目标,通过调整俯仰角度使得雷达系统能够扫描到所需区域的目标。
俯仰机构可以根据雷达系统的要求,实时调整天线的俯仰角度,以实现目标的发现和跟踪功能。
其次,雷达天线俯仰机构需要具备快速、准确的定位能力。
在雷达系统中,天线的俯仰角度可能需要频繁调整,因此俯仰机构需要具备快速调节的能力。
同时,对于目标的精确定位也是俯仰机构的职责之一,确保天线能够准确指向目标,以获得准确的目标信息。
除了俯仰角度的调节和定位功能外,雷达天线俯仰机构还需要具备稳定性和抗干扰能力。
在雷达系统工作过程中,天线需要承受各种复杂的环境影响,如风力、振动等,因此俯仰机构需要具备足够的稳定性,确保天线在各种环境下能够保持稳定的俯仰角度。
同时,俯仰机构还需要具备一定的抗干扰能力,能够抵抗外界的干扰信号,确保雷达系统能够正常工作。
此外,雷达天线俯仰机构还需要具备一定的自动化控制能力。
在现代雷达系统中,通常需要实现自动控制,通过与其他子系统的联动,实现雷达系统的自主工作。
俯仰机构需要具备与雷达系统其他子系统的接口,实现自动控制功能,以提高雷达系统的工作效率和准确性。
总之,雷达天线俯仰机构作为雷达系统中重要的组成部分,其主要职能是实现雷达系统的目标探测和跟踪功能。
通过俯仰机构的调节和定位功能,可以实现雷达天线波束的精确定位;同时,通过稳定性和抗干扰能力的提升,可以确保雷达系统在各种复杂环境下的正常工作;此外,俯仰机构还需要具备自动化控制能力,与其他子系统联动,实现雷达系统的自主工作。
这些职能的实现,为雷达系统的高效运行提供了坚实的支持。
基于solidworks的雷达俯仰机构的设计导言:雷达俯仰机构是一种用于控制雷达天线俯仰运动的装置。
其主要功能是通过调节雷达的俯仰角度,实现对目标的跟踪和探测。
在本文中,将使用Solidworks软件进行雷达俯仰机构的设计。
一、设计需求1.提供稳定可靠的俯仰运动功能:雷达俯仰机构需要能够平稳、可靠地进行俯仰运动,以确保雷达能够准确地锁定目标。
2.轻量化设计:由于航空、航天等领域对重量要求较高,因此雷达俯仰机构需要采用轻量化的设计,以减少整机的重量。
3.外形紧凑、结构简单:便于安装和维修。
二、设计流程1.设计方案选择:根据设计需求,选择适合的结构方案。
常见的雷达俯仰机构主要有摆臂式和伸缩杆式,本文选择摆臂式设计。
2.三维建模:使用Solidworks软件,根据设计方案进行雷达俯仰机构的三维建模。
在建模过程中,需要考虑零件的尺寸、重量、装配方式等因素。
3.运动仿真:通过Solidworks的运动仿真功能,模拟俯仰机构的运动过程,检查机构的稳定性和可靠性。
4.力学分析:通过Solidworks的强度分析功能,对俯仰机构的关键部位进行强度分析,确保机构能够承受工作时的载荷。
5.材料选择:根据力学分析的结果,选择适合的材料,以满足机构的强度要求。
6.细节设计和装配:对俯仰机构进行细节设计,包括轴承、传动装置等零件的选型和设计。
然后进行装配,确认各零件之间的连接和配合。
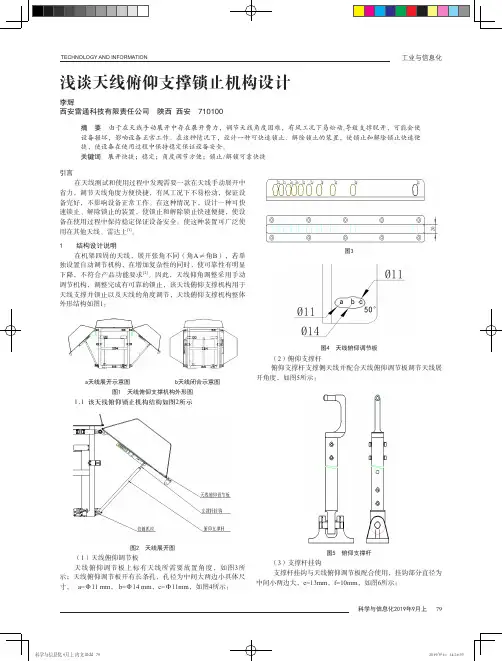
三、设计细节1.结构设计:雷达俯仰机构的主要部分包括底座、俯仰支撑杆、摆臂和传动装置。
底座用于固定整个机构,俯仰支撑杆连接底座和摆臂,摆臂用于支撑和运动雷达天线,传动装置则负责俯仰运动的传动。
2.轴承选择:为了确保机构的稳定运行,需要选择适当的轴承。
根据设计需求和载荷分析,可以选择球轴承或滚动轴承。
3.传动装置设计:传动装置的设计关系到整个俯仰机构的运动性能。
常见的传动装置有齿轮传动、带传动和链传动等。
根据设计需求和运动仿真结果,选择适合的传动方式。