第八章连杆机构的及其设计案例
- 格式:ppt
- 大小:3.84 MB
- 文档页数:98
第8章 连杆机构及其设计8.1 复习笔记本章主要介绍了平面四杆机构的类型及演化、基本知识和设计(作图法和解析法)。
学习时需要重点掌握不同条件下连杆机构的设计(作图法),常以分析作图题的形式考查。
除此之外,铰链四杆机构有曲柄的条件、急回运动、行程速度变化系数、传动角、死点等内容,常以选择题、填空题和判断题的形式考查,复习时需要把握其具体内容,重点记忆。
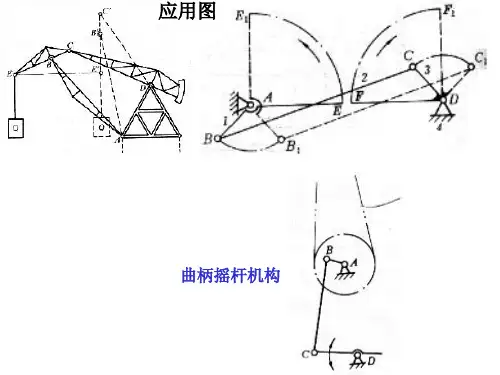
一、连杆机构及其传动特点(见表8-1-1)表8-1-1 连杆机构及其传动特点二、平面四杆机构的类型及应用1.四杆机构的基本形式(1)基本构架铰链四杆机构是平面四杆机构的基本形式,如图8-1-1所示。
台图8-1-1该机构各部分名称及含义见表8-1-2。
表8-1-2 铰链四杆机构(2)平面四杆机构的类型(见表8-1-3)表8-1-3 平面四杆机构的类型2.平面四杆机构的演化形式(1)改变构件的形状和运动尺寸如图8-1-2所示,曲柄摇杆机构中,将摇杆做成滑块形式,并将摇杆的长度增至无穷大,则演化成为曲柄滑块机构;曲柄滑块机构进一步演化为双滑块机构。
图8-1-2(2)改变运动副的尺寸通过改变运动副的尺寸,平面四杆机构可演化成具有其他特点功能的机构,如偏心轮机构。
将图8-1-3(a )所示的曲柄滑块机构中的转动副B 的半径扩大,使之超过曲柄AB 的长度,便得到如图8-1-3(b )所示的偏心轮机构。
图8-1-3(a)图8-1-3(b)(3)选用不同的构件为机架机构的倒置指选择运动链中不同构件作为机架以获得不同机构的演化方法,如图8-1-4所示。
图8-1-4 曲柄滑块机构的倒置(4)运动副元素的逆换将移动副两元素的包容关系进行逆换,并不影响两构件之间的相对运动,但却能演化成不同的机构或机构结构形式。
三、平面四杆机构的基本知识1.铰链四杆机构有曲柄的条件(见表8-1-4)表8-1-4 铰链四杆机构有曲柄的条件2.铰链四杆机构的急回运动和行程速度变化系数(见表8-1-5)表8-1-5 铰链四杆机构的急回运动和行程速度变化系数图8-1-5 四杆机构的极位夹角3.铰链四杆机构的传动角和死点(见表8-1-6)表8-1-6 铰链四杆机构的传动角和死点。
第八章 连杆机构一、学习指导与提示连杆机构是由若干构件用低副(回转副、移动副)组成的机构,用来实现预期的运动规律或轨迹。
本章重点讨论工程中应用最广泛的平面四杆机构。
建议读者熟练掌握平面四杆机构的工作特性,这些是设计、改进和创新机构的基础。
注意以下概念:1.铰链四杆机构的基本型式及尺寸关系铰链四杆机构有三种基本型式:曲柄摇杆机构、双曲柄机构和双摇杆机构。
这三种基本类型的差异在于是否存在曲柄和存在几个曲柄,其实质是铰链四杆机构各杆的相对长度,以及选取哪一根构件作为机架。
2.平面连杆机构的工作特性平面连杆机构的工作特性包括运动特性和传力特性两个方面。
运动特性包括各构件的位移、速度、加速度分析,从动件的急回运动特性等;传力特性包括压力角与传动角、机构的死点位置等概念。
(1)对于位移、速度、加速度分析,常用的分析方法是相对运动图解法和解析法。
由于相对运动图解法直观、方便,已可满足一般工程问题的需要,因此应重点掌握它。
请参阅第三章机构的运动分析。
(2)对于急回运动特性的分析,确定机构的极位夹角是关键。
极位夹角θ是指机构从动件处于两个极限位置时,曲柄的两个相应位置之间所夹的锐角。
机构从动件的急回运动特性用行程速比系数K 来表示,即()()θθ-+=οο180/180K 。
极位夹角θ>0,则K >1,机构具有急回特性,因此看一个机构有无急回作用,只需考察该机构有无极位夹角即可,只要θ>0,就存在急回运动,且θ角愈大,机构的急回运动愈显著。
(3)对于传力特性,应注意压力角α的定义。
在不计摩擦的情况下,机构从动件所受驱动力的方向线与受力点速度方向线之间所夹的锐角,称为压力角α。
压力角的余角,称为传动角γ。
传动角没有独立的定义,它与压力角互为余角,故总存在ο90=+γα。
对于连杆机构,因为传动角表现为连杆与从动件之间所夹的锐角,比较直观,所以有时用传动角γ来反映机构的传力性能较为方便。
压力角α是衡量机构传力性能好坏的重要指标。