引入新坐标架:
e3 ' e3
e2 '
新旧坐标架的关系为: ei ' Cije j
考察过P点,法向为 e1 '的截面上的应力:te1 ' e1
e1 '
e2
te1 ' ne1 ' gT e1 'gT
te1 ' 在 e1 ', e2 ', e3 ' 方向上的投影分别为
11 ' te1 ' ge1 ' e1 'gT ge1 ' C1kek gT gC1lel C1kC1l kl
z
zx
zy
xz P
yz
y
x
xy yx
t1
y
9
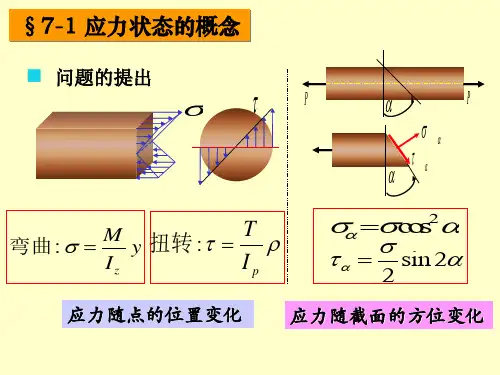
§1-1 应力与应力张量
t1 = x , xy , xz xe1 xye2 xze3 11e1 12e2 13e3 1 je j
t2 = yx , y , yz yxe1 ye2 yze3 t3 = zx , zy , z zxe1 zye2 ze3
nx
思考2:
yz P zy
xz zx
B
还有没有其他方法来 z
z
推导力的平衡方程或
A
力矩平衡方程? x
y
30
§1-2 平衡方程
思考3:
z z
如何在柱坐标系下推 导力的平衡方程?
y
x
r
31
§1-2 平衡方程
作业2:
z z
1,柱坐标系下推导 力的平衡方程
y
2,用积分方法推导
正交直角坐标系下力
x
在弹性体的任意点,总能得到3个相互垂直的平面,这 些平面上只作用有主应力,这些面称为主平面 三个特征向量对应的方向就是主方向 三个特征值对应的即主应力