基于VB的平面连杆机构的运动分析与运动仿真
- 格式:pdf
- 大小:263.30 KB
- 文档页数:7
基于VB的平面四杆机构计算机辅助设计
张祁莉
【期刊名称】《机电一体化》
【年(卷),期】2008(14)6
【摘要】运用VB可视化编程语言,根据两连架杆对应的位置,设计平面四杆机构。
该软件界面友好,方便直观,可用于实际工程设计,又可运用到教学中,提高教学效果。
【总页数】2页(P56-57)
【关键词】连架杆;VB;封闭多边形
【作者】张祁莉
【作者单位】五邑大学机电工程系
【正文语种】中文
【中图分类】TH112.1;TP391.72
【相关文献】
1.基于VB和ADAMS的平面四杆机构连杆曲线的仿真与分析 [J], 段守勇;孙涛;丁泽
2.平面铰链四杆机构计算机辅助设计及组合程序 [J], 王文博;陈明艳
3.基于VB的平面四杆机构运动分析与仿真轨迹 [J], 谭兆;聂时君;贺丰炎;胡士发;贺宗宝
4.平面四杆机构的计算机辅助设计 [J], 桑应禹;左晓明
5.基于Access和VB的平面四杆机构轨迹综合的屏幕拟合法 [J], 武丽梅;刘连平
因版权原因,仅展示原文概要,查看原文内容请购买。

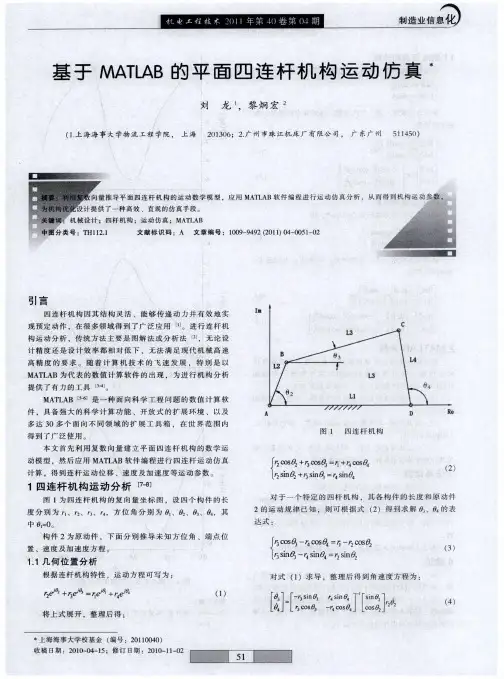
基于MATLAB的平面连杆机构运动分析及动画摘要建立了平面机构运动分析的数学模型,利用MATLAB进行了编程并设计了计算交互界面进而求解,为解析法的复杂计算提供了便利的方法,此方法也同样适用于复杂平面机构的运动分析,并为以后机构运动分析的通用软件的设计提供了基础。
建立了平面四杆机构运动分析的数学模型,以MATLAB 程序设计语言为平台,将参数化设计与交互式相结合,设计了平面四杆机构仿真软件,该软件具有方便用户的良好界面,并给出界面设计程序,从而使机构分析更加方便、快捷、直观和形象。
设计者只需输入参数就可得到仿真结果,再将运行结果与设计要求相比较,对怎样修改设计做出决策,它为四杆机构设计提供了一种实用的软件与方法。
以一种平面六连杆为例建立了平面多连杆机构的运动分析数学模型,应用MATLAB 软件进行了优化设计和仿真分析,为机构优化设计提供了一种高效、直观的仿真手段,提高了对平面多连杆机构的分析设计能力。
同时,也为其他机构的仿真设计提供了借鉴。
关键词:解析法,平面连杆机构,MATLAB,运动分析,运动仿真Based on the MATLAB Planar Linkage Mechanism MotionAnalysis and AnimationABSTRACTThis article established the kinematical mathematic model of the planar mechanism ,which is programmed and solved with designing the mutual interface of the calculation by MATLAB.This convenient method is provided for the complicated calculation of the analysis and also applicable to the kinematical analysis of the complex planar mechanism.A mathematical model of motion analysis was established in planar four- linkage ,and emulational software was developed. The software adopted MATLAB as a design language. It combined parametric design with interactive design and had good interfacefor user. Thus,it was faster and more convenient to analyse linkage. The emulational result was obtained as soon as input parameters was imported and the devisers can make decision-making of modification by the comparing emulational result with design demand. It provides an applied software and method for linkage.This paper took a planar six-linkage mechanism as a example to set up the mathematics model of planar multi-linkage mechanisms, and made the optimization design and simulation by the MATLAB software. It gave a efficiently and directly method to optimization design of mechanisms, and improved the ability of analyzing and designing the planar multi-linkage mechanisms. At the same time, it also provides a use for reference to the design and simulation for other mechanisms.KEY WORDS: analysis, planar linkage mechanisms, MATLAB, kinematical analysis, kinematical simulation目录1.1 平面连杆机构的研究意义 (1)1.2 平面连杆机构的研究现状 (1)1.3 MATLAB软件介绍 (2)1.3.1 MATLAB简介 (2)1.3.2 MATLAB软件的特点 (4)1.3.3 用MATLAB处理工程问题优缺点 (5)第2章平面机构运动分析的复数矢量解 (6)第3章平面四杆机构运动分析 (8)3.1 铰链四杆机构曲柄存在条件 (8)3.2 平面四杆机构的位移分析 (9)3.3 平面四杆机构的速度分析 (14)3.4 平面四杆机构的加速度分析 (15)第4章基于MATLAB的平面四杆机构运动分析 (17)4.1 基于MATLAB的平面四杆机构运动参数输入界面 (17)4.2 基于MATLAB的平面四杆机构运动参数计算 (21)4.3 基于MATLAB的平面四杆机构运动分析界面 (24)4.4 基于MATLAB的平面四杆机构运动仿真 (26)4.5 基于MATLAB的平面四杆机构运动参数清空及退出 (30)第5章平面六杆机构运动分析 (32)5.1 构建平面六杆机构数学模型 (32)5.2 平面六杆机构的运动分析 (33)5.2.1 曲柄导杆机构的运动分析 (33)5.2.2 摆动滑块机构的运动分析 (36)第6章基于MATLAB的平面六杆机构运动分析 (39)6.1 基于MATLAB的平面六杆机构运动参数输入界面 (39)6.2 基于MATLAB的平面六杆机构运动参数计算 (45)6.3 基于MATLAB的平面六杆机构运动分析界面 (49)6.4 基于MATLAB的平面六杆机构运动仿真 (52)6.5 基于MATLAB的平面六杆机构运动参数清空及退出 (56)结论 (57)参考文献 (59)第1章前言1.1 平面连杆机构的研究意义机构运动分析是不考虑引起机构运动的外力的影响,而仅从几何角度出发,根据已知的原动件的运动规律(通常假设为匀速运动),确定机构其它构件上各点的位移、速度、加速度,或构件的角位移、角速度、角加速度等运动参数。
基于matlab的平面四连杆机构设计以及该机构的运动仿真分析摘要四连杆机构因其结构方便灵活,能够传递动力并实现多种运动形式而被广泛应用于各个领域,因此对其进行运动分析具有重要的意义。
传统的分析方法主要应用几何综合法和解析综合法,几何综合法简单直观,但是精确度较低;解析法精确度较高,但是计算工作量大。
随着计算机辅助数值解法的发展,特别是MATLAB软件的引入,解析法已经得到了广泛的应用。
对于四连杆的运动分析,若应用MATLAB 则需要大量的编程,因此我们引入proe软件,我们不仅可以在此软件中建立实物图,而且还可以对其进行运动仿真并对其运动分析。
在设计四连杆时,我们利用解析综合法建立数学模型,再根据数学模型在MATLAB中编程可以求得其他杆件的长度。
针对范例中所求得的各连杆的长度,我们在proe软件中画出其三维图(如图4)并在proe软件中进行仿真分析得出CB,的角加速度的变化,从而得到CB,两接触处所受到的力是成周期性变化的,可以看出CB,两点处的疲劳断裂,我们提B,两点处极易疲劳断裂,针对C出了在设计四连杆中的一些建议。
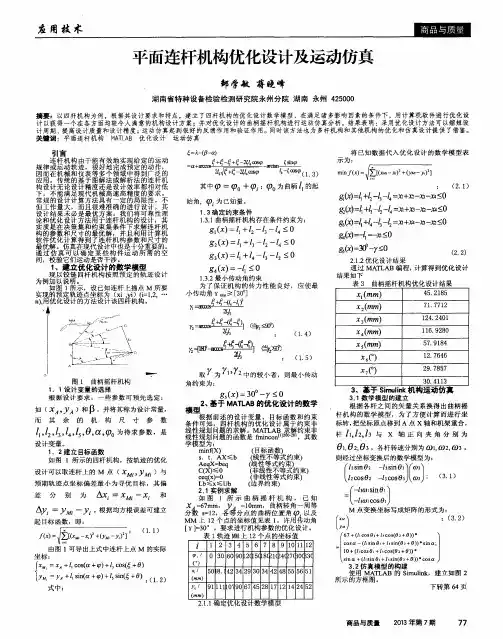
关键字:解析法 MATLAB 软件 proe 软件 运动仿真建立用解析法设计平面四杆机构模型对于问题中所给出的连架杆AB 的三个位置与连架杆CD 的三个位置相对应,即三组对应位置为:332211,,,,,ψϕψϕψϕ,其中他们对应的值分别为: 52,45,82,90,112,135,为了便于写代数式,可作出AB 与CD 对应的关系,其图如下:图—2 AB 与CD 三个位置对应的关系通过上图我们可以通过建立平面直角坐标系并利用解析法来求解,其直角坐标系图如下:φααi θi φi图—3 平面机构直角坐标系通过建立直角坐标系OXY ,如上图所示,其中0α与0φ为AB 杆与CD 杆的初始角,各杆件的长度分别用矢量d c b a ,,,,表示,将各矢量分别在X 轴与Y 轴上投影的方程为⎩⎨⎧=++=+)sin(*)sin(*)sin(*)cos(*)cos(*)cos(*φθαφθαc b a c d b a在上述的方程中我们可以消除θ,从而可以得到α与φ之间的关系如下:)cos(2)cos(2)cos(2)(2222αφαφab ac cd b d c a +-=+-++ (1) 为便于化简以及matlab 编程我们可以令:⎪⎪⎪⎩⎪⎪⎪⎨⎧==-++=c d H a d H ac b d c a H 32222212 (2) 通过将(2)式代入(1)式中则可以化简得到如下等式: )cos()cos()cos(321αφαφH H H +-=+ (3)我们可以通过(3)式将两连架杆对应的位置带入(3)式中,我们可以得到如下方程:⎪⎩⎪⎨⎧+-=++-=++-=+)cos()cos()cos()cos()cos()cos()cos()cos()cos(333332123222211311121ϕψϕψϕψϕψϕψϕψH H H H H H H H H (4) 联立(4)方程组我们可以求得321,,H H H ,再根据(2)中的条件以及所给定的机架d 的长度,我们可以求出其它杆件的长度为:⎪⎪⎪⎩⎪⎪⎪⎨⎧-++===1222322acH d c a b H d c H d a (5)四连杆设计范例:在日常生活中,我们经常看到消防门总能自动关上,其实它是利用四连杆机构与弹簧组成的。
VB在平面四连杆机构运动分析中的应用
阮江涛
【期刊名称】《机械》
【年(卷),期】2007(034)008
【摘要】介绍了基于VB实现对平面四连杆机构进行全面运动分析的方法.通过一种简单有效的方法建立了数学模型,采用计算机模拟技术,能动态演示机构的运动和自动绘制连杆上任意点的轨迹曲线,并能输出各运动构件的位移图、速度图和加速度图.为平面四连杆的运动分析提供了一条简单易行的途径.
【总页数】3页(P30-32)
【作者】阮江涛
【作者单位】天津工业大学,机械电子学院,天津,300160
【正文语种】中文
【中图分类】TP391;TH112
【相关文献】
1.PROE机构运动分析模块在平面连杆机构教学中的应用 [J], 汪秀珍;汪秀凤
2.AUTOCAD在平面机构运动分析中的应用 [J], 冯方;易建刚
3.C语言在平面机构运动分析中的应用研究 [J], 郑志勋
4.PRO/E在平面四连杆机构运动分析中的应用 [J], 凌锋;吴晓明;谢双显;张磊
5.瞬心法在平面机构运动分析中的应用 [J], 于晓文
因版权原因,仅展示原文概要,查看原文内容请购买。
V B编写机构运动仿真程序Revised by Liu Jing on January 12, 2021VB编写机构运动仿真程序步骤1.建立工程:打开VisualBasic6.0应用程序,在NewProject中建立“StandardEXE”标准可执行文件。
2.设计应用程序的界面:将Form1窗口的Caption改为“铰链四杆机构运动仿真”。
在Form1窗口中添加2个按钮,Name分别取“Start”、“Stop”,Caption分别取“开始”,“停止”。
再添加一个时钟控件,将其“Enabled”属性设置为“False”,“Interval”属性设置为“1000”。
3.编写程序代码:程序代码是在代码窗口中编写的。
直接双击界面,打开代码窗口,首先定义机构参数,分别表示4个杆长尺寸:L1,L2,L3,L4;铰链B点的坐标bx,by;铰链C点的坐标cx,cy;4个杆的位置角angle1,angle2,angle3,sita4。
DimL1,L2,L3,L4,bx,by,cx,cyAsIntegerDimangle1,angle2,angle3,sita4AsDouble4.在窗体载入的子过程中添加代码用于实现窗口的初始化,包括定义窗口的大小,设置用户自定义的坐标范围及坐标原点,以及设置机构的初始参数。
PrivateSubForm_Load()Form1.Width=12000Form1.Height=8000ScaleTop=-1000ScaleLeft=-1500ScaleWidth=3000ScaleHeight=2000L1=300L2=500L3=550L4=600bx=by=cx=cy=0angle1=0.5angle2=angle3=sita4=0EndSub5.添加一个“Sub”子过程,用于实现计算并绘制机构图形。
PrivateSubDrawing()DimL,fei,aa,bb'中间过程变量L=Sqr(L1*L1+L4*L4-2*L1*L4*Cos(angle1-sita4))fei=Atn((L4*Sin(sita4)-L1*Sin(angle1))/(L4*Cos(sita4)-L1*Cos(angle1)))'下面为VB中计算反正弦和反余弦的公式'Arcsin(X)=Atn(X/Sqr(-X*X+1))'Arccos(X)=Atn(-X/Sqr(-X*X+1))+2*Atn(1)aa=(L2*L2-L*L-L3*L3)/(2*L*L3)angle3=Atn(-aa/Sqr(-aa*aa+1))+2*Atn(1)+feibb=(L*Sin(fei)+L3*Sin(angle3))/(L*Cos(fei)+L3*Cos(angle3)) angle2=Atn(bb)If(bb<0)Thenangle2=angle2+3.1415926bx=L1*Cos(angle1)by=-L1*Sin(angle1)cx=bx+L2*Cos(angle2)cy=by-L2*Sin(angle2)DrawWidth=2Line(0,0)-(bx,by),RGB(255,0,0)Line(bx,by)-(cx,cy),RGB(0,255,0)Line(cx,cy)-(L4,0),RGB(0,0,255)DrawWidth=5Line(0,0)-(L4,0)EndSub6.实现机构动画:双击开始、停止按钮以及时钟控件,加入代码实现机构动画。
摘要平面齿轮连杆组合机构的分析与仿真学科名称: 机械设计及理论论文作者: 王有飞 签名:指导教授: 刘凯(教授) 签名:答辩时间:摘 要本文主要研究对象是功能丰富的平面齿轮连杆组合机构,借助运动学原理作者详细地分析了传动比对机构特征曲线的影响,得到各类型机构的特征曲线,并利用VC 软件开发出相应的运动仿真软件,再现该机构的三维实体运动过程。
该方法大大节约设计者在机构的实现和检验上所花费的时间,减少重复性劳动,同时通过虚拟模拟机构的运动,也锻炼了设计者的创新能力。
本文主要工作如下:首先,利用闭合矢量方程法,推导出9种组合机构各自的数学模型,建立运动学参数计算所需要的方程。
其次,利用MatLab软件和数值分析的方法求解该方程,得到各类型机构的运动参数值,同时也为以后的三维实体运动仿真提供了可靠的数据。
通过深入地分析输出结果,得到各类型机构的特征曲线与传动比的关系图。
再次,通过两种参数化建模方法创建了构件的三维模型库。
利用连杆机构和齿轮机构参数间的固有约束关系开发出Fourbar_gear验证软件,用该软件检查已建立的零件尺寸值是否满足指定类型的机构,改变零件的尺寸值直到满足了指定类型,然后再输出结果,这样做的目的是避免运动干涉。
最后,开发出的运动仿真软件通过加载动态链接库到SolidWorks软件中,再现了机构的运动轨迹,所开发的软件具有界面友好、操作简单等优点。
【关键词】:特征曲线 运动仿真 API 二次开发iAbstractThe Analysis and Simulation of Planar Gear-Linkage MechanismSPECIALTY: Mechanical Design & TheoryCANDIDATE: Wang.Youfei SIGNATURE: SUPERVISOR: Liu.Kai (professor)SIGNATURE:ABSTRACTThis paper is mainly focus on the planar gear-linkage mechanism (GLM), which canbe applied in various ways. The author use the basic kinematics theory to analysis the influences of transmission ratios to the characterized curve of the GLM, put the curve on the computer screen, develop corresponding software by VC and reappear the whole process of the GLM. In virtue of the method mentioned above, a lot of time people spendon the mechanism inspection and actualization can be saved, and the innovation capability of researchers can be improved by the virtual simulation of the movement of the GLM.Firstly, based on close-vector-equation method, the mathematic models of nine kindsof the GLM are established. Secondly, the equations are resolved by numerical computing method, as a result, the values of kinematics parameters are gained, which can offer realized data for immediately simulation. The relational graph between transmission ratios and characterized curve can be obtained, after the serious analysis of the output. Thirdly, the 3D part library is developed by two ways of parameter driving, and the problems of collision among models are avoided by “Fourbar-gear” software. Lastly, the author develops the simulation software by loading DLL in SolidWorks to reappear the 3D movement of the GLM.Key Words: characterized curve movement simulation API the second developmentii目录目录1前言 (1)1.1 选题背景 (1)1.2 国内外研究现状 (2)1.3 本文的主要工作 (4)1.3.1 平面齿轮组合机构的运动分析 (4)1.3.2 运动学参数求解和运动曲线的输出 (4)1.3.3三维零件库的创建和Fourbar_gear验证软件 (4)1.3.4 机构的组装和运动动画仿真的实现 (4)2 平面齿轮连杆组合机构的运动分析 (6)2.1 平面齿轮连杆组合机构的组成规则 (6)2.2 平面齿轮连杆组合机构的分类 (6)2.3 平面齿轮连杆组合机构的运动分析 (7)2.3.1 简单型回归式齿轮曲柄摇杆机构 (7)2.3.2 最简型回归式齿轮曲柄摇杆机构 (8)2.3.3 简单型非回归式齿轮曲柄摇杆机构 (9)2.3.4 最简型非回归式齿轮曲柄摇杆机构 (9)2.3.5 最简型回归式齿轮曲柄滑块机构 (10)2.3.6 最简型非回归式齿轮曲柄滑块机构 (10)2.3.7 最简型回归式齿轮导杆、摇块组合机构 (11)3平面齿轮连杆组合机构中构件的参数化建模和零件库的建立 (13)3.1 程序驱动参数化建模实例(齿轮构件) (13)3.1.1 系统界面设计模块 (13)3.1.2 齿形计算与生成模块 (13)3.1.3 轮毂生成模块 (14)3.1.4三维实体模型生成模块 (14)3.1.5 渐开线齿廓的数学模型建立 (14)3.2 尺寸驱动参数化建模实例(杆构件) (16)3.3 三维零件库的建立 (17)3.3.1 零件库的用途 (17)3.3.2 零件库的开发要求 (18)3.4 Fourbar_gear软件介绍 (19)4 平面齿轮连杆组合机构运动参数的求解 (23)4.1 机构运动参数的求解 (23)4.1.1 最简型回归式齿轮曲柄滑块机构 (24)4.1.2最简型非回归式齿轮曲柄滑块机构 (27)4.1.3 简单型非回归式齿轮曲柄摇杆机构 (28)4.1.4 最简型非回归式齿轮曲柄摇杆机构 (31)4.1.5 最简型回归式齿轮曲柄摇杆机构 (31)4.1.6 最简型非回归式齿轮双曲柄机构 (31)4.1.7 最简型回归式齿轮双曲柄机构 (32)4.1.8 最简型回归式齿轮导杆机构 (32)5 三维实体动画仿真的制作 (35)5.1机构的装配 (35)iii目录iv5.1.1 三维平移变换 (35)5.1.2 绕坐标轴的三维旋转变换 (36)5.1.3 混合变换 (36)5.1.4 装配体中实体零件的添加 (37)5.1.5 零件的位置设置 (37)5.2 动画仿真设计的核心技术 (37)5.2.1 Mat文件中数据的输出 (38)5.2.2 构件的运动控制 (39)5.3 SolidWorks二次开发 (39)5.3.1 SolidWorks二次开发的方法 (40)5.3.2 向软件中添加用户自定义的各类资源 (42)a. 用户菜单的添加 (42)b. 用户工具栏的添加 (42)c. 对话框资源的添加 (43)5.4 平面齿轮连杆组合机构中相关类的设计 (44)5.5 平面齿轮组合机构的界面设计 (45)6 结论 (49)致谢 (50)参考文献 (51)附录 Ⅰ (55)附录Ⅱ (56)附录Ⅲ (57)1 前言1前言1.1 选题背景在对«机械原理»的学习过程中,机构由于其本身概念的抽象性和类型的多样性,使得在对它的理解和掌握上存在着一定的困难;为了实际问题的解决,有时我们不得不对已有的机构进行改进甚至直接设计出新的机构,而设计出的机构可行与否,还需要进行检验和校核。
平面六杆机构的运动分析摘要:本论文首先对平面四杆机构进行运动分析,再对平面六杆机构进行运动分析,进而分析了平面六杆机构的动力性能,最后运用运动仿真软件Visual Basic6.0对平面四杆机构和平面六杆机构进行运动模拟仿真。
我们通过对平面四杆机构和平面六杆机构连杆的运动进行系统地深入分析,从而获得平面连杆机构运动性能,进而达到对平面连杆机构的动力性能分析的目的。
为了使研究结果更加形象生动,我们运用Visual Basic6.0来模拟平面四杆机构和平面六杆机构的运动的过程,并且得出连杆的运动曲线图及其它相关结果。
本文的主要特色是在各个设计进度中将会大量应用计算机高级语言Visual Basic编程来模拟平面四杆机构和六杆机构平面连杆机构的运动学分析的过程,包括建立运动约束方程和解方程两部分。
模拟的原理是借助于连杆机构设计的解析法,利用时钟控件来循环改变直线或圆的坐标,实现动画仿真功能,同时我们可以进一步分析和检查平面连杆机构的位移、速度和加速度等运动特性的正确性。
通过这些我们便可以得到平面连杆机构的力学性能,从而达到本文的目的。
关键词:连杆机构运动分析动力性能 Visual Basic仿真指导老师签名:The Dynamic Behavior Analysis of Planar LinkageAbstract: This paper analyzes the motion of planar four-bar linkage at first, then it analyzes the motion of planar six-bar linkage. After that ,it does analysis of the dynamic performance of plane six-bar linkage. Finally, it simulates the campaign of planar four-bar linkage and plane six-bar agencies, using a simulation software -- visual basic 6.0.After systematically and analyzed plane four-bar and plane six-bar linkage in depth, we obtained the campaign performance of planar linkage mechanism. By this we achieved the purpose of analyzing the dynamic behavior of planar linkage mechanism. In order to make the study results more vivid and to obtain the linkage’s campaign curves and ot her related results ,we use visual basic 6.0 to simulate the campaign process of plane four-bar and plane six-bar linkage mechanism. The main special features in each design progress lieutenant general and will apply deluxe language Microsoft Visual Basic of calculator in great quantities, to imitate planar four-bar linkage mechanism and planar six-bar linkage mechanism to get analytical process of the kinetics of the linkage mechanism, include the establishment move control formula and reach agreement formula two parts. Principle of imitate is ask for help from linkage mechanism design of resolution method, make use of clock to control a piece to come to circulating change straight line or sit a mark roundly, carry out an animation to imitate true function。
基于VB 的平面四杆机构运动分析与仿真轨迹作者:谭兆等来源:《电脑知识与技术》2015年第09期摘要:根据平面四杆机构的几何条件建立相应的数学模型,然后以VB可视化语言为基础输出图形和数据,设计者可以根据数据、动态仿真和轨迹部分分析出连杆运动规律,从而得到符合设计要求的连杆机构优化和简化设计分析过程。
关键词:VB;动态仿真;轨迹曲线中图分类号:TP391.9 文献标识码:A 文章编号:1009-3044(2015)09-0243-02Abstract: According to the geometry of four-bar linkage set up a corresponding mathematical model,then output data and graphics in the condition of visual language--Visual Basic 6.0. Designer observing the change of motion parameters and motion law in connecting rod motion from the corresponding data output,dynamic simulation and locus,thus get corresponding parameter which accord the design requirement ,optimize and simplify analysis process.Key words: VB; acceleration; organization emulation; path curve平面四杆机构在生产、生活中广泛应用,其优势是能够满足多种复杂运动规律和轨迹的要求,结构简单、工作可靠。
设计平面四杆机构时需确定各杆构件的一系列条件和要求,但设计复杂、数据变化大,连杆曲线图谱中所含的轨迹有限只能得到较为粗糙的轨迹,因此如果能够通过程序输出机构的仿真和轨迹[1],就可以很好地对连杆平面任一点的数据、运动规律及轨迹进行分析。