三座标微型位移传感器
- 格式:doc
- 大小:4.86 MB
- 文档页数:2

三坐标检测原理与方法三坐标检测是一种精密的测量方法,通常用于测量复杂形状的物体的尺寸、形状和位置。
下面是关于三坐标检测原理与方法的50条详细描述:1. 三坐标检测是一种基于坐标轴的测量方法,通常采用X、Y、Z三轴的坐标系统来描述物体的位置和形状。
2. 三坐标检测的原理是利用测头在三维空间内移动,通过测量目标物体上的多个点来获取物体的三维坐标信息,从而完成对物体的尺寸和形状的测量。
3. 三坐标检测的方法包括机械式、光学式和触发式等多种不同的技术手段。
4. 机械式三坐标检测是通过精密的机械结构和控制系统来实现对物体的三维坐标测量,通常精度较高。
5. 光学式三坐标检测是利用光学投影和成像技术,通过相机或激光扫描仪等设备对目标物体进行三维坐标测量。
6. 触发式三坐标检测是利用机械触发装置,通过机械接触或接触式传感器来获取目标物体的三维坐标信息。
7. 三坐标检测的精度通常可以达到亚微米级别,适用于高精度的工件测量和质量控制。
8. 三坐标检测可以用于测量各种形状的物体,包括曲面、孔径、螺纹等复杂结构。
9. 三坐标检测通常需要配备专用的三坐标测量机或设备,具备高精度的测量系统和稳定性的机械结构。
10. 三坐标检测可以结合计算机辅助设计(CAD)和计算机辅助制造(CAM)系统,实现对物体尺寸和形状的数字化测量和分析。
11. 三坐标检测的核心是测头的运动控制和数据采集系统,通过精密的控制和采集设备来实现对物体的精确测量。
12. 三坐标检测可以实现对物体的全尺寸测量,包括长度、宽度、高度、角度、曲率等多种几何尺寸的测量。
13. 三坐标检测可以应用于多种行业领域,包括汽车制造、航空航天、机械加工、医疗器械等各种领域。
14. 三坐标检测的测量精度和效率受到测头精度、机床刚性、环境温度等多种因素的影响,需要通过定期校准和维护来保持稳定的精度。
15. 三坐标检测通常需要对测头进行校准和标定,以确保测头测量的准确性和稳定性。

德国MICRO-EPSILON位移传感器、转速传感器、光纤传感器介绍Micro Epsilon是全qiu领xian的传感器制造商之一。
50多年来,我们一直提供可靠、高性能、独te的解决方案,尤其是在需要高精度测量或检查时。
我们的产品范围包括用于测量距离和位移的传感器、用于红外温度测量和颜色检测的传感器,以及用于尺寸测量和缺陷检测的系统。
Micro Epsilon为工业应用提供最大范围的高精度位移传感器、红外温度传感器、颜色传感器以及尺寸测量设备和系统。
无论您的领域是研发、制造自动化还是机器制造,我们都能提供满足您个人测量任务具体要求的解决方案。
1)Micro Epsilon的感应传感器基于涡流原理,设计用于位移、距离、位置、振荡和振动的非接触式测量。
当在苛刻的工业环境(压力、污垢、温度)中需要高精度时,它们尤其适用。
Micro Epsilon的感应传感器在需要亚微米精度的情况下提供极其精确的测量。
2)电容式传感器设计用于位移、距离和位置的非接触式测量,以及厚度测量。
由于其高信号稳定性和分辨率,电容式位移传感器被应用于实验室和工业测量任务。
例如,在生产控制中,电容式传感器测量薄膜厚度和粘合剂的应用。
它们安装在机器上,可以监测位移和刀具位置。
3)optoNCDT传感器为工业激光位移测量树立了里程碑。
无论是位移、距离还是厚度测量,Micro Epsilon激光传感器都被认为是同类产品中最hao的传感器之一。
这些激光传感器用于例如工厂自动化、电子产品生产、机器人和车辆建造中的测量和监测任务。
4)共焦彩色共焦DT测量系统用于快速距离和厚度测量。
不同的传感器模型和控制器接口开辟了多用途的应用领域,例如在半导体行业、玻璃行业、医疗工程和塑料生产中。
5)用于非接触式距离和厚度测量的高精度白光干涉仪Micro Epsilon的创新白光干涉仪为高精度距离和厚度测量树立了biao杆。
这些传感器能够实现亚纳米分辨率的稳定测量结果,提供相对较大的测量范围和偏移距离。
第九章 三坐标测量机第一节 概述一、三坐标测量机的产生三坐标测量机(Coordinate Measuring Machining ,简称CMM )是20世纪60年代发展起来的一种新型高效的精密测量仪器。
它的出现,一方面是由于自动机床、数控机床高效率加工以及越来越多复杂形状零件加工需要有快速可靠的测量设备与之配套;另一方面是由于电子技术、计算机技术、数字控制技术以及精密加工技术的发展为三坐标测量机的产生提供了技术基础。
1960年,英国FERRANTI 公司研制成功世界上第一台三坐标测量机,到20世纪60年代末,已有近十个国家的三十多家公司在生产CMM ,不过这一时期的CMM 尚处于初级阶段。
进入20世纪80年代后,以ZEISS 、LEITZ 、DEA 、LK 、三丰、SIP 、FERRANTI 、MOORE 等为代表的众多公司不断推出新产品,使得CMM 的发展速度加快。
现代CMM 不仅能在计算机控制下完成各种复杂测量,而且可以通过与数控机床交换信息,实现对加工的控制,并且还可以根据测量数据,实现反求工程。
目前,CMM 已广泛用于机械制造业、汽车工业、电子工业、航空航天工业和国防工业等各部门,成为现代工业检测和质量控制不可缺少的万能测量设备。
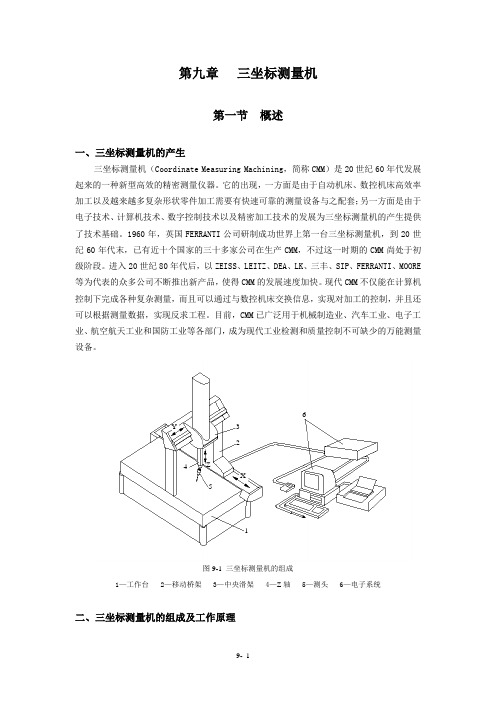
图9-1 三坐标测量机的组成1—工作台 2—移动桥架 3—中央滑架 4—Z 轴 5—测头 6—电子系统二、三坐标测量机的组成及工作原理4 3615X2Y Z(一)CMM 的组成三坐标测量机是典型的机电一体化设备,它由机械系统和电子系统两大部分组成。
(1)机械系统:一般由三个正交的直线运动轴构成。
如图9-1所示结构中,X 向导轨系统装在工作台上,移动桥架横梁是Y 向导轨系统,Z 向导轨系统装在中央滑架内。
三个方向轴上均装有光栅尺用以度量各轴位移值。
人工驱动的手轮及机动、数控驱动的电机一般都在各轴附近。
用来触测被检测零件表面的测头装在Z 轴端部。
(2)电子系统:一般由光栅计数系统、测头信号接口和计算机等组成,用于获得被测坐标点数据,并对数据进行处理。

三坐标测量仪初步知识一、三坐标测量机的产生三坐标测量机(Coordinate Measuring Machining,简称CMM)是20世纪60年代发展起来的一种新型高效的精密测量仪器。
它的出现,一方面是由于数控机床高效率加工以及越来越多复杂形状零件加工需要有快速可靠的测量设备与之配套;另一方面是由于电子技术、计算机技术、数字控制技术以及精密加工技术的发展为三坐标测量机的产生提供了技术基础。
现代CMM不仅能在计算机控制下完成各种复杂测量,而且可以通过与数控机床交换信息,实现对加工的控制,并且还可以根据测量数据,实现反求工程。
目前,成为现代工业检测和质量控制不可缺少的万能测量设备。
二、三坐标测量机的组成及工作原理(一)CMM的组成三坐标测量机是典型的机电一体化设备,它由机械系统和电子系统两大部分组成。
(1)机械系统:一般由三个正交的直线运动轴构成。
X向导轨系统装在工作台上,移动桥架横梁是Y向导轨系统,Z向导轨系统装在中央滑架内。
三个方向轴上均装有光栅尺用以度量各轴位移值。
人工驱动的手轮及机动、数控驱动的电机一般都在各轴附近。
用来触测被检测零件表面的测头装在Z轴端部。
(2)电子系统:一般由光栅计数系统、测头信号接口和计算机等组成,用于获得被测坐标点数据,并对数据进行处理。
(二)CMM的工作原理三坐标测量机是基于坐标测量的通用化数字测量设备。
它首先将各被测几何元素的测量转化为对这些几何元素上一些点集坐标位置的测量,在测得这些点的坐标位置后,再根据这些点的空间坐标值,经过数学运算求出其尺寸和形位误差。
要测量工件上一圆柱孔的直径,可以在垂直于孔轴线的截面I内,触测内孔壁上三个点(点1、2、3),则根据这三点的坐标值就可计算出孔的直径及圆心坐标OI;如果在该截面内触测更多的点(点1,2,…,n,n为测点数),则可根据最小二乘法或最小条件法计算出该截面圆的圆度误差;如果对多个垂直于孔轴线的截面圆(I,II,…,m,m为测量的截面圆数)进行测量,则根据测得点的坐标值可计算出孔的圆柱度误差以及各截面圆的圆心坐标,再根据各圆心坐标值又可计算出孔轴线位置;如果再在孔端面A上触测三点,则可计算出孔轴线对端面的位置度误差。

三坐标测量机(Coordinate Measuring Machining,简称CMM)是一种三维尺寸的精密测量仪器,主要用于零部件尺寸、形状和相互位置的检测。
是基于三坐标测量原理,即将被测物体置于三坐标测量机的测量空间,获得被测物体上各测点的坐标位置,根据这些点的空间坐标值,经过数学运算,求出被测的几何尺寸、形状和位置,来判断被测产品是否达到加工图纸所标国标公差的范围内。
又称三坐标测量仪或三次元。
三坐标测量仪是20世纪60年代发展起来的一种新型高效的精密测量仪器。
它的出现,一方面是由于自动机床、数控机床高效率加工以及越来越多复杂形状零件加工需要有快速可靠的测量设备与之配套;另一方面是由于电子技术、计算机技术、数字控制技术以及精密加工技术的发展为三坐标测量机的产生提供了技术基础。
1960年,英国FERRANTI公司研制成功世界上第一台三坐标测量机,到20世纪60年代末,已有近十个国家的三十多家公司在生产CMM,不过这一时期的CMM尚处于初级阶段。
进入20世纪80年代后,以ZEISS、LEITZ、DEA等为代表的众多三坐标测量机生产公司不断推出新产品,使得CMM的发展速度加快。
现代CMM不仅能在计算机控制下完成各种复杂测量,而且可以通过与数控机床交换信息,实现对加工的控制,并且还可以根据测量数据,实现反求工程。
目前,三坐标测量仪CMM已广泛用于机械制造业、汽车工业、电子工业、航空航天工业和国防工业等各部门,成为现代工业检测和质量控制不可缺少的万能测量设备。
三坐标测量机按照结构形式分类可分为移动桥式结构、固定桥式结构、龙门式结构、悬臂式结构、立柱式结构等等。
三坐标测量机详细原理功能价格介绍,如何选购三坐标测量机2011-10-15 10:18第一节概述一、三坐标测量机的产生三坐标测量机(Coordinate Measuring Machining,简称CMM)是20世纪60年代发展起来的一种新型高效的精密测量仪器。

三坐标直径的评价方法(原创实用版4篇)篇1 目录1.引言2.三坐标直径测量的原理3.三坐标直径的评价方法4.影响三坐标直径评价的因素5.结论篇1正文1.引言在制造业中,产品的尺寸精度是衡量其质量的重要标准之一。
对于圆柱形产品,如轴类零件,三坐标直径的测量和评价是确保其尺寸精度的关键环节。
本文将介绍三坐标直径测量的原理,以及三坐标直径的评价方法。
2.三坐标直径测量的原理三坐标直径测量是指在一个三维空间内,通过测量某一点的三个坐标值,计算出该点与圆柱形产品的直径。
通常采用接触式测量,即将测头与被测零件接触,通过测头的位移传感器获取被测点的三维坐标值。
3.三坐标直径的评价方法三坐标直径的评价方法主要分为以下几种:(1)最大最小直径法:通过计算测得的三个直径的最大值和最小值,得出该零件的三坐标直径。
(2)平均直径法:将测得的三个直径值相加,再除以 3,得出该零件的三坐标直径。
(3)最小二乘法:根据最小二乘原理,通过计算各测点与理论直径的偏差,得出该零件的三坐标直径。
4.影响三坐标直径评价的因素在三坐标直径评价过程中,以下因素可能影响评价结果:(1)测量设备的精度:测量设备的精度直接影响到测头的测量精度,从而影响到三坐标直径的评价结果。
(2)测量过程中的人为因素:操作者在进行测量过程中,可能会出现操作不当、测量位置不准确等问题,影响评价结果。
(3)被测零件的形状和表面质量:被测零件的形状和表面质量对测量结果也有影响,如表面粗糙度、氧化层等。
5.结论三坐标直径的评价方法是确保圆柱形产品质量的重要手段。
篇2 目录1.引言2.三坐标直径测量仪的概述3.三坐标直径评价方法的分类4.三坐标直径评价方法的优缺点分析5.结论篇2正文【引言】在制造业中,产品的尺寸精度是衡量产品质量的重要标准之一。
三坐标直径测量仪作为一种高精度的测量设备,可以对产品的尺寸进行精确测量。
然而,如何对三坐标直径测量仪的评价方法进行选择和优化,以提高测量的准确性和效率,是制造业面临的重要问题。
电容式位移传感器的线性度标定与不确定度评定葛川;张德福;李朋志;郭抗;李佩玥;杨怀江【摘要】由于光刻投影物镜装调中电容传感器的线性度指标不能够满足位移调节精度的需求,本文提出了一种提高电容传感器测量线性度的方法.该方法采用压电驱动器提供位移进给;采用高精度激光测长干涉仪校准电容传感器的线性度,提供位移反馈以保证运动控制精度.采用高阶曲线拟合方法得到拟合系数对传感器线性度进行在线标定;对标定实验中的环境、安装、机构以及控制等进行不确定度分析与评定以保证电容传感器的线性度测量精度;最后进行电容传感器线性度的标定实验.实验结果表明:本文提出的线性度标定方法能够减小各误差项对于测量结果的影响,标定后传感器线性度由0.047 14%提高至0.004 84%,近一个数量级,并且线性度重复性较高,重复性偏差为0.38 nm,全行程内线性度的合成不确定度为5.70 nm,能够满足光刻物镜中位移控制精度的需求.【期刊名称】《光学精密工程》【年(卷),期】2015(023)009【总页数】7页(P2546-2552)【关键词】电容传感器;位移传感器;标定;线性度;不确定度;光刻投影物镜【作者】葛川;张德福;李朋志;郭抗;李佩玥;杨怀江【作者单位】中国科学院长春光学精密机械与物理研究所应用光学国家重点实验室超精密光学工程研究中心,吉林长春130033;中国科学院长春光学精密机械与物理研究所应用光学国家重点实验室超精密光学工程研究中心,吉林长春130033;中国科学院长春光学精密机械与物理研究所应用光学国家重点实验室超精密光学工程研究中心,吉林长春130033;中国科学院长春光学精密机械与物理研究所应用光学国家重点实验室超精密光学工程研究中心,吉林长春130033;中国科学院长春光学精密机械与物理研究所应用光学国家重点实验室超精密光学工程研究中心,吉林长春130033;中国科学院长春光学精密机械与物理研究所应用光学国家重点实验室超精密光学工程研究中心,吉林长春130033【正文语种】中文【中图分类】TP212.131 引言随着集成电路特征线宽的不断减小,对极大规模集成电路制造所需的光刻物镜的精度要求越来越高。
SW-3型拉线相对式位移传感器使用说明书中国地震局工程力学研究所中国·哈尔滨目录一、用途及特点 (2)二、结构原理 (2)三、主要技术指标 (2)四、使用方法 (3)五、使用注意事项 (3)六、仪器的成套性 (4)SW —3型拉线相对式位移传感器一、用途及特点主要用于工程振动和多自由度地震模拟振动台试验中结构或模型相对于基础或台面以及楼层间的相对位移参量。
该传感器具有如下特点: ◇可进行多自由度振动下单向测试。
◇体积小、连接简单,安装容易,操作方便。
◇传感器可以不装在模型上,模型毁坏时不使仪器毁坏。
◇可用于其他工程振动领域里的相对位移测量。
二、结构原理SW-3 型拉线相对式位移传感器采用了悬臂梁式应变桥传感原理。
其结构原理如图1所示,它由悬臂梁(1)、应变桥(2)、恢复弹簧(3)、传动杆(4)、输出电缆(5)、钢丝(6)及外壳等组成。
在悬臂梁的根部正反面各贴有两个应变片,组成全桥后通过四芯电缆输出。
位移传感器等效电路如图2所示。
图中R1、R3为悬臂梁正面的应变片,R2、R4为反面的应变计,E 为电桥电源,u 为电桥的输出。
当拉动钢丝使悬臂梁产生位移时,贴在悬臂梁根部的应变片通过应变仪把悬臂梁产生的应变转换成与位移成正比的电压信号,然后送给记录仪。
图1 位移传感器结构 图2 位移传感器等效电路三、主要技术性能最大可测位移: ±5mm频 率 范 围: 0~30Hz(拉线长度5m) 灵 敏 度: 0.2mV /mm/V线 性 度: ≤2% 分 辨 率: 0.0025mm 电 源: 1V ~5VDC 尺 寸: 145×35×25mm 重 量: 0.65kg四、使用方法1.将位移传感器固定在参考点上,将钢丝的一头穿入位移传感器传动杆的孔中和传动杆固定,钢丝的另一头和被测点相连,将位移传感器的输出电缆和应变仪相连。
图2中的1(橙色)和2(兰色)接应变仪的输入;3(棕色)和4(黑色)接直流电源。
微型位移传感器是一种能够测量和记录物体相对位置变化的装置。
它可以将微小的位移转化为电信号,并通过电子设备来实现测量和监测目的。
微型位移传感器广泛应用于工业自动化、机械加工、医疗仪器、航空航天等领域,对于精密测量和控制起着至关重要的作用。
一、微型位移传感器的基本原理微型位移传感器主要基于以下原理来实现位移测量和控制:1. 电阻原理:通过测量材料的电阻值来获取位移信息。
当物体产生位移时,电阻值会发生相应的变化,通过测量电阻的变化来确定位移值。
2. 容错原理:通过测量材料的电容值来获取位移信息。
当物体产生位移时,电容值会发生相应的变化,通过测量电容的变化来确定位移值。
3. 电感原理:通过测量材料的电感值来获取位移信息。
当物体产生位移时,电感值会发生相应的变化,通过测量电感的变化来确定位移值。
4. 光电原理:通过测量光信号的变化来获取位移信息。
当物体产生位移时,光信号会发生相应的变化,通过测量光信号的变化来确定位移值。
以上原理中,电阻原理和容错原理是微型位移传感器中应用最为广泛的原理,因为它们具有测量精度高、反应速度快、适应性强等优点。
二、微型位移传感器的应用领域微型位移传感器具有精度高、响应快、可靠性强等特点,因此在各个行业都有着广泛的应用:1. 工业自动化领域:在工业生产中,微型位移传感器常常用于测量和控制机械设备的位移,以实现自动化生产和提高生产效率。
2. 机械加工领域:在机械加工过程中,微型位移传感器常常用于测量材料的变形和位移,以保证加工精度和质量。
3. 医疗仪器领域:在医疗设备中,微型位移传感器常常用于测量和控制治疗设备的位移,以保证治疗效果和安全。
4. 航空航天领域:在航空航天领域,微型位移传感器常常用于测量和控制飞行器的姿态和位移,以保证飞行安全和稳定。
微型位移传感器在许多领域都有着重要的应用价值,它不仅可以提高工作效率,还可以保证设备和产品的质量和安全,因此在未来的发展中,微型位移传感器将会有着广阔的应用前景。