无人机载荷图像仿真平台的设计与实现
- 格式:pdf
- 大小:1023.95 KB
- 文档页数:3



无人机系统仿真设计解决方案一想起无人机系统仿真设计,我脑海中立刻浮现出那复杂而又精妙的世界。
无人机,这个曾经只存在于科幻小说中的产物,如今已经渗透到了我们生活的方方面面。
那么,如何设计一套完善的无人机系统仿真解决方案呢?下面,我就用我十年的方案写作经验,为大家详细解答。
我们得明确无人机系统仿真的目标。
无人机系统仿真不仅仅是模拟无人机的飞行,还包括了无人机的控制、导航、通信、任务规划等多个方面。
所以,在设计解决方案时,我们要全面考虑这些因素。
1.仿真平台的选择在选择仿真平台时,我们要考虑到无人机的种类和仿真任务的需求。
目前市面上主流的仿真平台有MATLAB/Simulink、ANSYS、X-Plane 等。
MATLAB/Simulink适合进行算法研究和系统级仿真,ANSYS则擅长于结构分析和动力学仿真,而X-Plane则更侧重于飞行性能的仿真。
2.仿真模型的建立我们要建立无人机的仿真模型。
这个模型应该包括无人机的动力学模型、控制模型、导航模型、通信模型等。
在建立模型时,我们要尽量简化,抓住主要因素,忽略次要因素。
比如,在动力学模型中,我们可以忽略无人机的弹性变形,将其视为刚体。
3.仿真参数的设置在仿真参数设置方面,我们要根据无人机的实际参数来设置。
这些参数包括无人机的质量、惯性矩、翼载、推力等。
还要设置环境参数,如风速、温度、湿度等。
这些参数的设置将直接影响到仿真结果的准确性。
4.仿真流程的设计(1)初始化:设置仿真起始时间、仿真步长等。
(2)输入:设置无人机的初始状态、控制指令等。
(3)仿真:根据动力学模型、控制模型等,计算无人机的状态变化。
(4)输出:记录无人机的状态数据,用于后续分析。
(5)终止:判断仿真是否达到预设的终止条件。
5.仿真结果的分析仿真结束后,我们要对仿真结果进行分析。
这包括无人机的飞行轨迹、稳定性、控制性能等方面。
通过分析仿真结果,我们可以发现无人机系统存在的问题,并进行优化。

无人机载荷装置控制系统的设计与实现随着科技的不断发展,无人机在各个领域中被广泛应用,如农业、环境保护、安全预警等。
而无人机的载荷装置则成为实现无人机任务的重要组成部分,因为可以通过载荷装置实现对目标对象进行采集、监控和观测等操作。
因此,本文将探讨无人机载荷装置控制系统的设计与实现。
一、无人机控制系统的基础构成无人机控制系统基本的构成主要包括传感器、执行机构和控制器。
其中,传感器是感知无人机周围环境的设备,如提供姿态信息的加速度计、陀螺仪、磁强计等;执行机构则是实现无人机动作的装置,如舵机、马达、电机等;控制器则是对传感器采集到的信息进行运算处理,然后通过执行机构来对无人机进行控制。
二、无人机载荷装置的设计要求无人机载荷装置作为实现无人机任务的关键组成部分,在设计时需满足以下要求:1.负载能力无人机载荷装置需要有一定的承重能力,以便搭载相应的设备完成任务。
而承载能力不足会使无人机不稳定,甚至危及安全,因此必须在设计时充分考虑。
2.鲁棒性和可靠性无人机载荷装置在实际使用中,受到复杂的环境因素和操作误差的影响,容易出现故障。
为提高机载装置的可靠性,可以采用更高质量的材料,采用多点支撑设计,合理设置冗余措施等。
3.协同性无人机载荷装置需要与其他设备协同工作,如地面站、地理信息系统等。
因此在设计时,需要充分考虑协调性和统一性,采用标准接口和数据协议,以实现数据的快速传输和处理。
三、无人机载荷装置控制系统的实现方案无人机载荷装置控制系统的实现方案主要涉及四个方面:主控板选择、操作系统选择、电路设计和软件开发。
1.主控板选择目前市场上常见的主控板有STM32系列、FPGA、Arduino等,根据实际需求的灵活性、扩展性、性能等因素,可根据实际需求选择主控板。
2.操作系统选择目前无人机使用的操作系统主要分为RTOS、Linux、Windows 等。
Linux系统相对轻量级,可以满足对无人机的控制和数据处理等需求。
无人机三维视景仿真系统的设计与实现作者:谢迪来源:《硅谷》2015年第01期摘要无人机操作是一个复杂的过程,对操作人员素质要求很高。
传统的无人机地面站系统数据回显多采用参数、二位图标以及图表曲线等形式,使操作手不能对飞行在三维空间内的无人机飞行状态有一个直观的感受。
本文依据虚拟仿真现实技术的相关理论,介绍了在无人机地面站系统中加入三维视景仿真功能后该系统的基本结构以及三维视景仿真系统。
该系统可真实直观地反映无人机飞行状态,它是基于Creator来实现无人机和场景建模,通过VC++加载VEGA软件来完成分布式仿真控制程序的设计。
系统模拟了无人机弹射起飞、巡航飞行及开伞降落等各飞行阶段的真实状态。
关键词无人机;三维视景;飞行仿真;仿真控制;仿真技术中图分类号:TP3 文献标识码:A 文章编号:1671-7597(2015)01-0036-03由于无人机具备成本低、灵活性强、便于隐蔽等诸多特点,其在军事和民用等领域的应用也越发广泛。
无人机系统主要由平台系统、任务系统和地面控制站操作系统几大部分组成,平台系统通过装载任务系统完成特定的飞行任务,地面控制站操作系统完成平台系统和任务系统的实时监测和控制,其手段主要依赖于地面操作人员对实时回传、分发的飞行状态数据和任务设备状态数据的监测,并根据对下发数据的综合判断向平台系统和任务系统做出操作指令[1]。
随着航空技术和电子技术的融合发展,飞行控制系统和任务系统的日趋复杂,发生故障隐患的可能性随之升高,导致无人机操作人员需要关注的数据量倍增。
若依然采用简单的数字直接显示或图表曲线的等数据回显方式,就要求操作人员要有丰富经验,才能依据大量并不直观数据综合判断出平台系统当前的飞行状态。
而三维视景仿真技术可有效解决该问题,由于该技术是计算机技术、图形图像处理与生成技术、多媒体技术、信息合成技术、显示技术等诸多高新技术的综合运用,可使非专业人员亦能无人机模拟训练系统中,对无人机状态有直观的感受,能有效缩短无人机操作人员的培训周期。
无人机控制系统设计与仿真无人机(Unmanned aerial vehicle, UAV)作为一种自主飞行的飞行器,在日常生活和工业领域中被广泛应用。
为了确保无人机的安全飞行和高效任务执行,优秀的无人机控制系统设计与仿真是非常重要的。
一、无人机控制系统设计无人机控制系统的设计主要包括飞行控制系统和通信控制系统两个方面。
1. 飞行控制系统设计:无人机飞行控制系统是确保飞行器平稳飞行、包括航向、高度和速度控制在内的关键。
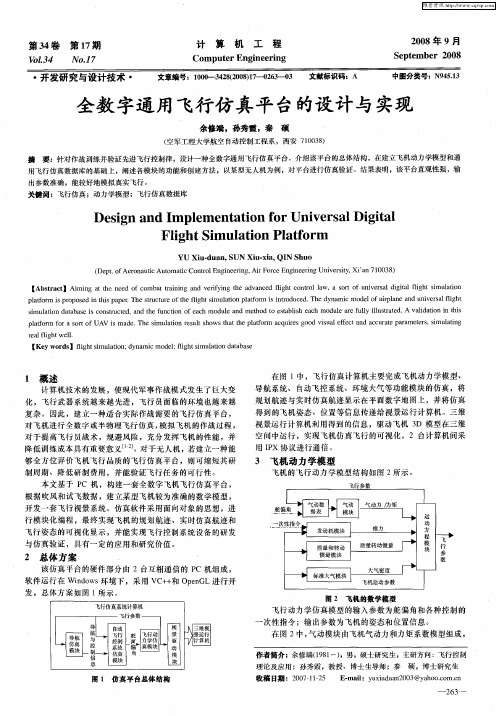
设计一个稳定可靠的飞行控制系统需要以下步骤:a) 确定飞行器的动力学模型:通过数学建模,从物理角度描述无人机的运动特性。
b) 设计控制器:基于动力学模型,选择适当的控制器类型(如PID控制器、模糊控制器或模型预测控制器),设计控制器的参数,并利用控制理论方法进行系统稳定性分析。
c) 构建控制系统:根据控制器设计结果,建立整个飞行控制系统,包括传感器、执行器、控制算法等元素的组合,将信号传递和处理流程定义清楚。
2. 通信控制系统设计:无人机通信控制系统是实现与地面控制站之间的通信和数据传输的关键。
设计一个可靠的通信控制系统需要以下步骤:a) 确定通信协议:根据任务需求和无人机特性,选择适当的通信协议(如Wi-Fi、蓝牙或Zigbee),考虑到通信距离和数据传输速率等因素。
b) 设计通信模块:根据通信协议,设计通信模块的硬件和软件,包括天线、无线模块和数据传输协议等元素。
c) 构建通信系统:根据通信模块设计结果,建立整个通信系统,包括无人机上的通信模块和地面控制站上的通信模块。
二、无人机控制系统仿真无人机控制系统的仿真是在计算机环境中模拟和评估无人机飞行控制的有效方法。
通过仿真可以降低测试和调试的成本,并提前评估控制系统的性能。
1. 仿真平台选择:选择合适的仿真平台是进行无人机控制系统仿真的第一步。
常用的无人机仿真平台包括MATLAB/Simulink、dronekit和PX4等。
2. 建立仿真模型:根据实际无人机的动力学模型和控制系统设计结果,利用选择的仿真平台建立无人机的仿真模型。
—266— 无人机载荷图像仿真平台的设计与实现李登亮,叶 榛(清华大学计算机系智能技术与系统实验室,北京100084)摘 要:无人机有效载荷图像仿真平台为无人机操作员训练、地面站建设、以及指挥控制和通信系统提供必要的模拟数据和模拟环境,是研制无人机系统及其测控与通信系统的重要部分。
该文讨论了如何基于相对低成本的PC 机和图像处理与传输技术构建一个完整的无人机有效载荷图像仿真平台。
该平台可以接收无人机及其指挥控制系统的各种状态参数以及控制指令,通过图像处理,模拟实际情况生成有效载荷图像数据,并实时下传,以验证无人机及其指挥控制和通信系统的概念结构和工作过程。
关键词:无人机;有效载荷;图像处理;仿真Design and Realization of Image Simulation Platformfor UA V PayloadsLI Dengliang, YE Zhen(Lab of Intelligent Technology and System, Department of Computer Science and Technology, Tsinghua University, Beijing 100084)【Abstract 】The image simulation platform for UA V payloads is important to research UA V systems, because it provides simulating data and virtual environment. It creates the platform based on low-cost PC, image process and transmission. Based on parameters of UA V system and real time image process, the platform simulates image data of payload and transmits them to UA V system. The result proves that the platform is important to validate the conception frameworks and working processes of UA V system. 【Key words 】UA V; Payload; Image processing; Simulation计 算 机 工 程Computer Engineering 第32卷 第6期Vol.32 № 6 2006年3月March 2006·开发研究与设计技术·文章编号:1000—3428(2006)06—0266—03文献标识码:A中图分类号:TP391.4无人机的不载人特性,使其可以长时间地进出各种危险的空域发挥特殊效用,完成许多过去只有有人驾驶飞机才能完成的任务;同时,无人机体积小、结构简单、自重轻、成本低、使用维护方便、机动灵活性好,具有很大的发展潜力和良好的应用前景。
在无人机设计及相关控制系统的研制过程中,需要飞行模拟系统进行辅助,以节约成本、降低风险、简化操作、缩短实验周期。
无人机飞行模拟系统主要包含动力学仿真、视景仿真和有效载荷仿真。
本文的研究主要集中于有效载荷仿真部分。
由于当今无人机的主要任务还是监视、侦察和目标截获,因此执行监视、侦察和目标截获任务的有效载荷是无人机系统的重要组成。
由于有效载荷系统工作原理复杂,价格昂贵,在无人机设计及其相关控制系统的研制中,通常借助有效载荷模拟系统,以节约成本。
有效载荷仿真为无人机相关控制系统的数据接收、存储和分发、图像处理、操作员培训等功能提供无人机任务载荷仿真数据,它是无人机系统研制的一个重要组成部分,也是设计、检验和发展无人机系统的基础。
由于无人机及其飞行任务的不同,其有效载荷的类型和特点也不相同,因此要建立一个符合具体任务需求的载荷仿真系统是比较费时的。
本文针对无人机及其相关控制系统的特点,提出并实现了一个含有典型有效载荷类型的无人机有效机载荷图像仿真平台。
该平台可以不断地实时获取来自无人机相关控制系统对载荷的实时控制指令以及无人机飞行参数,模拟载荷工作状态的变化,通过系列几何变换和图像处理算法实时生成载荷视场图像数据,并实时下传至相关控制系统。
此平台与无人机动力学仿真相配合,可以与相关控制系统组成一个大系统,以验证无人机控制系统的功能。
1 无人机有效载荷概览目前世界各国所用的无人机任务有效载荷都是光学照相机、红外扫描器、电视摄像机、前视红外等无源成像设备以及SAR 雷达。
下面简要描述这些典型有效载荷的工作现状及其发展趋势。
1.1 光学相照机光学照相机是古老的成像设备,也是最早装在无人机上使用的侦察设备。
其最大优点是具有较高的分辨率,目前其他成像设备还无法达到。
缺点是需要回收冲洗,不能满足实时情报需求。
目前它在世界各国的无人机上遭到冷遇,正让位于CCDTV 。
1.2 红外行扫描仪红外行扫描仪(IRLS)是一种热成像装置。
它利用扫描镜收集红外辐射并投射到多元碲镉汞等红外探测器上,形成红外图像信号,用其调制光源并记录在感光胶片上,就构成红外照相机;也可以用这种红外图像信号调制视频通道,经过数据传输系统发送回地面接收站。
前者与光学相机一样具有缺乏实时性的弊病,后者则得以克服。
红外行扫描器属于机载无源探测设备,其最大的优势就是能够探测物体自然的红外辐射而不借助环境光的照射,因此可以进行夜间监视和侦察。
但它机械装置复杂,由于体积和总量较大,也很少在无基金项目:国家“863”计划基金资助项目“高高空无人机战术控制系统”(2003AA755031)作者简介:李登亮(1976—),男,硕士生,主研方向:图像处理,图像检索;叶 榛,教授收稿日期:2005-02-27 E-mail :li-d102@人机上使用。
1.3电视摄像机无人机上使用的电视摄像机都是电荷耦合器件电视(CCDTV)摄像机。
它使用固态电荷耦合器件作为光电转换成像器件。
目前摄像机一般都采用焦平面阵列电荷耦合器件,其主要优点是体积小、重量轻、功效低、灵敏度高、抗冲击震动和寿命长,这使得它在无人机中获得广泛应用。
它不仅用于监视、侦察获取实时图像情报,而且用于辅助地面操纵员遥控驾驶。
目前,CCDTV在昼间图像情报探测设备中占据统治地位。
1.4前视红外前视红外(FLIR)即热成像器(TI),是一种通过光学系统把景物红外辐射成像在红外敏感元件阵列上并变换成视频电信号的成像红外探测器。
它具有较高空间分辨率,能分辨出景物的各个细部,形成反映景物自身热特征的图像。
它探测景物自身红外辐射,无需环境光(包括红外)照射,因此,前视红外是目前能在纯暗夜发挥作用并且不会被目视(可见光)伪装和假目标欺骗的无可替代的夜间无源成像探测器。
目前,它广泛用于夜间图像情报探测设备中。
1.5多探测器转塔如上所述,各种探测器都有自己独特的优点和缺点以及应用范围,把它们结合起来就可以取长补短,在昼夜24h执行监视和侦察任务。
多探测器转塔(Malti-Sensor Turret)是把前视红外、电视摄像机、激光测距/照射器等二三种探测器综合进转塔形式的多轴陀螺稳定平台(万向支架)内的多任务光电探测系统,它能相对于无人机自由转动。
由于多探测器转塔综合了多种载荷的优势,已用于多种型号的无人机中。
1.6 SAR雷达近20多年来,合成孔径雷达(Synthetic Aperture Radar, SAR)得到快速发展。
SAR是主动式微波成像雷达,能够提供高分辨率的目标图像,具有全天候、全天时的优势。
尽管SAR 技术复杂,研制和使用成本高昂,但是世界各国都对其投入了大量物力和财力进行研制,已有多种型号的无人机装备了SAR。
随着技术的发展,SAR的成本和重量会逐渐得以控制,它将越来越普遍地在无人机上使用。
2 系统设计从发展无人机及其相关控制系统的需求来看,需要能够模拟典型载荷工作的有效载荷模拟平台,以替代种类繁多、价格昂贵的真实载荷来配合系统的工作。
要求无人机任务有效载荷仿真平台能够综合以上这些典型载荷的工作特点,为无人机地面控制系统的数据接收、存储和分发、图像处理、操作员培训等功能提供无人机任务载荷仿真数据。
具体地讲,该平台需要实现两个层次的功能:(1) 图像层次的仿真,即通过视景仿真把载荷图像与具体的载荷参数、空间几何关系及无人机姿态有机地结合起来。
图像层次的仿真需要研究CCDTV(电荷耦合器件电视摄像机)、IR(红外)、SAR(合成孔径雷达)3种典型无人机载荷的特性、参数和数据格式;仿真以上3种载荷在不同高度、视角、焦距等参数下的图像数据生成并显示载荷可观测视窗及相应的状态和控制参数;生成载荷数据并实时传送。
(2) 系统层次的仿真,关心的是载荷系统以及相应的算法和设备,可以看成是载荷设计和发展的工具,用来预测和检验系统的性能。
系统层次的仿真需要考虑影响载荷数据质量的所有因素,为载荷系统建立数学模型;根据不同任务选择和设计符合要求的任务有效载荷;研究不同载荷数据在机上的实时处理及发送方法。
在综合分析无人机系统及其相关控制系统研制的需求以及无人机有效载荷发展状况之后,并根据实际系统的需要,我们设计了包含在当今无人机上广泛使用的3种典型有效载荷的图像仿真系统。
系统结构如图1。
2.1原始载荷数据在实际系统中,载荷数据的产生原理和处理方法因载荷类型而不同。
我们根据本平台的实际需求,简化了载荷数据生成和处理过程,直接采用经过处理后的大幅遥感图像作为原始数据来源。
载荷数据输出是在实时采集无人机参数和载荷控制命令的基础之上,通过空间几何关系和图像处理,及时从图像文件数据源中解算出来的载荷视场图像。
通过图像处理技术,可以从同一数据源模拟出CCDTV、IR、SAR等典型载荷的视场图像,以仿真无人机飞行状态对载荷输出的影响以及载荷对控制命令的响应。
2.2 空间几何关系处理载荷数据(即载荷视场图像)生成,与以下参数相关:无人机的姿态、位置、速度等参数,载荷的焦距、视场角、镜头方向等。
假定无人机质心、GPS天线回转中心、载荷镜头像面中心重合(如不重合,需要考虑相应平移量)。
通过空间几何关系换算,可以确定载荷在任意位置和参数状态下的数据输出。
以下是用到的几个坐标系和转换关系(图2)。
图2 空间几何关系转换(1) 机体坐标系S b-o b x b y bz b,用于描述飞机飞行姿态角。
原点取在飞机质心处,3个坐标轴与飞机固联,X b轴处于飞机对称平面内,与机身轴线一致,指向前方,Y b轴垂直对称平面向右,Z b轴在对称平面内,和X、Y轴成右手直角坐标系。