基于 proe的蜗轮蜗杆参数化设计
- 格式:doc
- 大小:1.34 MB
- 文档页数:24
目录内容摘要 (1)关键词 (1)1.绪论 (2)1.1蜗轮蜗杆减速器简介 (2)1.2基于P RO/ENGINEER的设计的意义 (2)2.总体方案确定 (3)2.1已知参数 (3)2.2传动装置总体设计 (3)3.原动机类型的选择和参数的计算 (4)3.1电动机的选择: (4)3.2运动参数计算: (5)4.蜗轮蜗杆的传动设计 (6)5.涡轮蜗杆基本尺寸设计 (12)5.1蜗杆基本尺寸设计 (12)5.1.1初步估计蜗杆轴外伸段的直径 (12)5.1.2计算转矩 (12)5.1.3 Pro/E建模蜗杆外形 (13)5.2蜗轮基本尺寸设计 (13)5.2.1蜗轮结构及基本尺寸表 (13)5.2.2 Pro/E建模涡轮外形 (13)6.蜗轮轴的尺寸设计与校核 (14)6.1轴的直径与长度的确定 (14)6.2轴的受力分析 (15)6.3轴的校核计算 (17)7.减速器箱体的结构设计 (19)7.1箱体尺寸的计算 (19)7.2确定齿轮位置和箱体内壁线 (21)8.减速器其他零件的选择 (22)8.1键选择 (22)8.2轴承选择 (22)8.3密封圈选择 (23)8.4弹簧垫圈选择 (23)9.减速器的润滑 (23)10.PRO/E建模减速器及分析 (23)10.1P RO/E建模减速器其它附件和总装 (24)10.2使用P RO/E进行干涉分析 (27)11.结论 (30)参考文献: (31)致谢 (32)内容摘要:减速器是一种常用的传动装置,目前已经广泛应用于生产的各行业中,传统的减速器设计已经不能满足企业对减速器的结构和性能要求。
为了解决减速器的设计周期长,设计成本高,传动质量较低等问题,采用参数化技术、优化设计技术对减速器设计。
参数化设计是各种CAD软件的核心技术,在广大的设计人员中这项设计被广泛应用,并取得良好的社会效益。
Pro/ENGINEER是全方位的3D产品开发软件,集成零件设计、曲面设计、工程图制作、产品装配、模具开发、NC加工、钣金设计、铸造件设计、造型设计、逆向工程、机构仿真等,广泛应用于航空、汽车、造船、电子模具等行业。

蜗轮蜗杆的创建蜗杆的创建:在PRO/E 中使用参数化创建蜗杆,具体操作步骤如下:1.创建新的零件文件:File/New →【输入零件名称:wogan,取消Use default template 的选中记号,然后单击OK 按钮】→【选择公制单位mmns_part_solid后单击OK按钮】→【基准坐标系PRT_CSYS_DEF及基准面RIGHT、TOP、FRONT显示在画面上】2.参数的输入Tools/Program…/Edit Design→【打开记事本,在INPUT和END INPUT 之间以及RELATION和END RELATION 之间添加输入参数如下,然后存盘,并退出记事本】INPUTM NUMBER ;模数Z1 NUMBER ;蜗杆头数Z2 NUMBER ;蜗轮齿数DIA1 NUMBER ;蜗杆分度圆直径(标准系列值)LEFT YES_NO ;旋向,YES表示左旋,否则为右旋END INPUTRELATIONSDIA2=M*Z2 ;蜗轮分度圆直径L=(11+0.06*Z2)*M ;蜗杆有效螺旋线长度END RELATIONS→【信息窗口出现“Do you want to incorporate your changes into the model:【YES】”,选择YES,以便输入参数值】→【Enter→Select All,根据信息窗口提示,各参数赋初值如下】M = 2.5Z1 = 1Z2 = 30DIA1 = 28旋向暂不输入,后期处理。
各参数的建立和赋值结束。
3.生成螺旋体Insert/Helical Swee.Protrusion…→【出现“螺旋扫描”对话框,接受属性子菜单中各默认选项,包括Constant(等导程)、ThruAxis(截面通过旋转轴线)、Right Handed(右旋) →Done】→【进入扫描廓型创建画面,绘制图7-2所示直线(尺寸如图),并绘制回转轴线】→【Tools/Relations→显示参数符号如图7-3所示,并出现Relationship对话框】→【在对话框内输入:sd3=L;sd4=L/2;sd1=DIA1/2→OK】→【单击图标,进入导程设定→在导程设定窗口输入导程值M*PI*Z1→点击图标】→【进入截面绘制画面,绘制图7-4所示截面图形(尺寸如图)】→【Tools/Relations→显示参数符号如图7-5所示,并出现Relations对话框】→【在对话框内输入:sd61=1.25*M;sd62=M;sd63=M*PI/2-2*M*tan(20) →OK】→【单击图标→OK,生成螺旋体如图所示,】4.导程参数化上述造型过程中,各参数除导程外均已实现参数化,下面对导程实施参数化。

PROE-蜗轮蜗杆的参数化建模蜗轮蜗杆的创建蜗杆的创建:在PRO/E 中使用参数化创建蜗杆,具体操作步骤如下:1.创建新的零件文件:File/New →【输入零件名称:wogan,取消Use default template 的选中记号,然后单击OK按钮】→【选择公制单位mmns_part_solid后单击OK按钮】→【基准坐标系PRT_CSYS_DEF及基准面RIGHT、TOP、FRONT显示在画面上】2.参数的输入Tools/Program…/Edit Design→【打开记事本,在INPUT和END INPUT 之间以及RELATION和END RELATION 之间添加输入参数如下,然后存盘,并退出记事本】INPUTMNUMBER;模数Z1NUMBER;蜗杆头数Z2NUMBER;蜗轮齿数DIA1NUMBER;蜗杆分度圆直径(标准系列值)LEFTYES_NO;旋向,YES表示左旋,否则为右旋END INPUTRELATIONSDIA2=M*Z2 ;蜗轮分度圆直径L=(11+0.06*Z2)*M ;蜗杆有效螺旋线长度END RELATIONS→【信息窗口出现“Do you want to incorporate your changes into the model:【YES】”,选择YES,以便输入参数值】→【Enter→Select All,根据信息窗口提示,各参数赋初值如下】M = 2.5 Z1 = 1Z2 = 30DIA1 = 28旋向暂不输入,后期处理。
各参数的建立和赋值结束。
3.生成螺旋体Insert/Helical Swee.Protrusion…→【出现“螺旋扫描”对话框,接受属性子菜单中各默认选项,包括Constant(等导程)、ThruAxis(截面通过旋转轴线)、Right Handed(右旋) →Done】→【进入扫描廓型创建画面,绘制图7-2所示直线(尺寸如图),并绘制回转轴线】→【Tools/Relations→显示参数符号如图7-3所示,并出现Relationship对话框】sd3=L;sd4=L/2;sd1=DIA1/2→OK】→【单击图标,进入导程设定→在导程设定窗口输入导程值M*PI*Z1→点击图标】形(尺寸如图)】→【Tools/Relations→显示参数符号如图7-5所示,并出现Relations对话框】→【在对话框内输入:sd61=1.25*M;sd62=M;sd63=M*PI/2-2*M*tan(2 0) →OK】→【单击图标→OK,生成螺旋体如图所示,】4.导程参数化上述造型过程中,各参数除导程外均已实现参数化,下面对导程实施参数化。

第一部分零件图的创建一、创建蜗杆1 新建文件在工具栏中单击“新建”按钮,在弹出“新建”对话框中选择“零件”单选按钮,早子类型中选择“实体”单选按钮。
输入文件名称为“wogan”,去掉“使用缺省模板”框的对勾,单击“确定”,在弹出的“新文件夹选项“对话框中选择公制模板mmns_part_solid,单击”确定“按钮进入零件设计界面。
2 创建蜗杆(1)单击特征工具栏中“旋转“按钮,在视图下侧出现的”旋转“界面上选择“实体”按钮,以指定生成拉伸实体,单击“放置”按钮,打开上滑面板中的定义按钮,系统弹出“草绘”对话框,选取FRONT基准平面作为草绘平面,接受系统默认的生成方向,单击对话框中“草绘”按钮,进入草绘界面。
(2)单击草绘工具栏中“中心线”按钮,绘制一条竖直中心线,然后按照图1-1所示的草绘剖面绘制草图。
单击“草绘器”工具栏按钮退出草绘模式。
图1-1(3)接受系统默认的旋转角度值为360,单击鼠标中建完成特征创建。
3、创建倒角(1)单击工程特征工具栏上的“倒角“按钮,打开”倒角“特征操作板,在“标注形式”下拉框中选择“45×D”选项,在尺寸框输入倒角尺寸为3和0.5,选择需要倒的角。
(2)单击按钮完成倒角特征的创建,最终结果如图1-2所示。
图1-24、创建螺纹(1)单击特征工具栏中“插入“按钮,选择螺旋扫描,进入草绘区,在菜单管理器中选择“常数,穿过轴,右手定则”完成,退出。
所需节距为4.71。
(2)单击按钮完成螺旋扫描特征的创建,最终结果如图1-3图1-35、创建键槽(1)、创建基准平面。
单击特征工具栏中“基准平面”按钮,选front:f3平面偏移5。
(2)单击特征工具栏中“拉伸“按钮,在“拉伸”界面上选择“实体“按钮,以指定生成拉伸实体,单击”放置“按钮,打开上滑面板。
单击上滑面板中的定义按钮,系统弹出”草绘“对话框,并且提示用户选择草绘平面,选取DTM1基准平面作为草绘平面,接受系统默认上的生成方向,单击对话框中”草绘“按钮,进入草绘界面。

蜗轮蜗杆的创建蜗杆的创建:在PRO/E 中使用参数化创建蜗杆,具体操作步骤如下:1.创建新的零件文件:→【输入零件名称:wogan,取消Use default template 的选中记号,然后单击OK按钮】→【选择公制单位mmns_part_solid后单击OK按钮】→【基准坐标系PRT_CSYS_DEF及基准面RIGHT、TOP、FRONT显示在画面上】2.参数的输入Tools/Program…/Edit Design→【打开记事本,在INPUT和END INPUT 之间以及RELATION和END RELATION 之间添加输入参数如下,然后存盘,并退出记事本】INPUTM NUMBER ;模数Z1 NUMBER ;蜗杆头数Z2 NUMBER ;蜗轮齿数DIA1 NUMBER ;蜗杆分度圆直径(标准系列值)LEFT YES_NO ;旋向,YES表示左旋,否则为右旋END INPUTRELATIONSDIA2=M*Z2 ;蜗轮分度圆直径L=(11+0.06*Z2)*M ;蜗杆有效螺旋线长度END RELATIONS→【信息窗口出现“Do you want to incorporate your changes into the model:【YES】”,选择YES,以便输入参数值】→【Enter→Select All,根据信息窗口提示,各参数赋初值如下】M = 2.5Z1 = 1Z2 = 30DIA1 = 28旋向暂不输入,后期处理。
各参数的建立和赋值结束。
3.生成螺旋体Insert/Helical Swee.Protrusion…→【出现“螺旋扫描”对话框,接受属性子菜单中各默认选项,包括Constant(等导程)、ThruAxis(截面通过旋转轴线)、Right Handed(右旋) →Done】→【进入扫描廓型创建画面,绘制图7-2所示直线(尺寸如图),并绘制回转轴线】→【Tools/Relations→显示参数符号如图7-3所示,并出现Relationship对话框】→【在对话框内输入:sd3=L;sd4=L/2;sd1=DIA1/2→OK】→【单击图标,进入导程设定→在导程设定窗口输入导程值M*PI*Z1→点击图标】→【进入截面绘制画面,绘制图7-4所示截面图形(尺寸如图)】→【Tools/Relations→显示参数符号如图7-5所示,并出现Relations对话框】→【在对话框内输入:sd61=1.25*M;sd62=M;sd63=M*PI/2-2*M*tan(20) →OK】→【单击图标→OK,生成螺旋体如图所示,】4.导程参数化上述造型过程中,各参数除导程外均已实现参数化,下面对导程实施参数化。
PROE蜗轮蜗杆的参数化建模蜗轮蜗杆传动是一种常用的传动方式,在机械系统中有广泛的应用。
蜗轮蜗杆传动具有传递大扭矩的特点,能够将输入轴的高速运动转化为输出轴的低速高扭矩运动。
为了实现对蜗轮蜗杆传动的参数化建模,需要考虑蜗轮、蜗杆和传动比等参数。
首先,我们需要确定蜗杆的基础参数。
蜗杆是一种螺旋行星轮,具有螺旋齿。
蜗杆的主要参数包括螺旋角、导程、齿宽等。
螺旋角是蜗杆轴线上的螺旋线与轴线的夹角,导程是螺旋线的一个周期所对应的轴向长度。
齿宽是蜗杆螺旋线上的齿顶宽度。
这些参数的大小会直接影响蜗杆传动的传动效率和承载能力。
其次,我们需要确定蜗轮的基础参数。
蜗轮是与蜗杆啮合的齿轮,在蜗轮蜗杆传动中起到传递力矩和转速的作用。
蜗轮的主要参数包括齿数、模数、压力角等。
齿数是蜗轮上的齿的数量,模数是齿轮齿条上一个齿的尺寸。
压力角是齿轮齿条齿廓的斜率。
这些参数决定了蜗轮的几何形状和传动性能。
最后,我们需要确定蜗轮蜗杆传动的传动比。
传动比是指输入轴转速与输出轴转速之间的比值。
在蜗轮蜗杆传动中,传动比与蜗杆的导程和蜗轮的齿数之间有直接的关系。
传动比越大,输出轴的转速越低,扭矩越大。
传动比的选择需要考虑到机械系统的要求和设计要素。
了解了蜗轮、蜗杆和传动比等参数后,我们可以进行蜗轮蜗杆传动的参数化建模。
首先,确定蜗杆和蜗轮的基本参数,根据设计要求和传动比确定具体数值。
然后,根据蜗杆和蜗轮的参数,计算出蜗杆周速度、蜗轮周速度和传动比。
根据计算结果,可以进一步确定蜗轮蜗杆传动的传动效率、承载能力和传动精度。
在参数化建模的过程中,可以利用现代计算机辅助设计软件,通过数学模型和三维图形表示等方法,对蜗轮蜗杆传动进行仿真和分析。
通过仿真和分析,可以对蜗轮蜗杆传动的性能进行优化和改进。
通过参数化建模,可以实现对蜗轮蜗杆传动的快速设计和优化,提高传动效率和工作性能。
通过以上建模过程,可以实现对蜗轮蜗杆传动参数化建模。
这种建模方法可以提高设计效率,优化设计结果,满足机械系统对传动性能要求。
摘要介绍了蜗杆涡轮形状的数学描述,实现蜗杆涡轮精确三维实体造型的方法。
在Pro/E环境下,建立了蜗杆涡轮的数学模型。
介绍了基于Mechanism的机构运动仿真的基本工作流程,对Pro/E进行二次开发,实现看蜗杆涡轮的参数化三维实体设计,通过机构的运动仿真,动态观看运动仿真的啮齿和运动情况,测试机构的有关运动性能的参数,有利于机构优化和提高设计效率,可以构成机构的虚拟设计、制造及仿真分析的平台。
关键字:Pro/E;蜗杆涡轮;参数化设计;运动仿目录序言---------------------------------------------------------------错误!未定义书签。
第一章 ------------------------------------------------------------2 1.1了解蜗杆涡轮的传动特点------------------------------------ 2 1.2了解蜗杆涡轮相关参数的查取方法---------------------------- 2 1.3涡轮蜗杆的应用-------------------------------------------- 3 第二章 Pro/E的基本建模-------------------------------------------- 4 2.1 渐开线形成原理--------------------------------------------4 2.2渐开线的特征----------------------------------------------4 2.4蜗杆涡轮基本参数------------------------------------------4 2.4啮合蜗杆蜗轮的建模----------------------------------------4 2.5蜗杆的参数化过程------------------------------------------4 2.6涡轮的绘制------------------------------------------------5 第三章涡轮的创建------------------------------------------------ 6 3.1涡轮的建模分析------------------------------------------- 63.2 涡轮的建模过程------------------------------------------- 6 3.2.1创建参数---------------------------------------------6 3.2.2创建齿轮基本圆---------------------------------------7 3.2.3创建齿廓曲线-----------------------------------------8 3.2.4 创建扫引轨迹----------------------------------------113.2.5 创建圆柱--------------------------------------------123.2.6变截面扫描生成第一个轮齿---------------------------- 133.2.7阵列创建轮齿---------------------------------------- 14 第四章蜗杆的创建-------------------------------------------------16 蜗杆的建模-------------------------------------------------16第五章结论--------------------------------------------------------22 第六章致谢词------------------------------------------------------23参考文献-----------------------------------------------------------24序言Pro/E是由美国PTC公司推出的一套博大精深的三维CAD/CAM参数化软件系统,其内容涵盖了产品从概念设计、工业造型设计、三维模型设计、分析计算、动态模拟与仿真、工程图输出到生产加工成产品的全过程,其中还包含了大量的电缆及管道布线、磨具设计与分析等实用模块,应用范围涉及航天、汽车、机械、数控(NC)加工及电子等诸多领域。
Proe如何画蜗轮蜗杆设计思路1.确定减速比i=Z2/Z1(本设计Z1=2,Z1=40)=40/2=20 . 22.选定模数-确定蜗杆直径系数和蜗杆尺寸 (3)3.计算中心距 (5)4.涡轮尺寸表 (6)5蜗轮蜗杆主要参数与尺寸计算 (7)6.蜗轮蜗杆的画法 (9)7.proe图中数据详解 (9)8.prt附件和视频附件 (11)Proe 如何画蜗轮蜗杆设计思路 (注,下载后可以打开prt 文件和视屏) 1.确定减速比i=Z2/Z1(本设计Z1=2,Z1=40)=40/2=20(1) 头数Z1 从蜗杆的端面看有几条出来的螺旋线就是几头了蜗杆上只有一条螺旋线的称为单头蜗杆,即蜗杆转一周,蜗轮转过一齿,若蜗蜗杆头数杆上有两条螺旋线,就称为双头蜗杆,即蜗杆转一周,蜗轮转过两个齿。
依此类推,设蜗杆头数用Z1表示(一般Z1=1、2、4),蜗轮齿数用Z2表示。
从传动比公式可以看出,当 Z1=1,即蜗杆为单头,蜗杆须转一转蜗轮才转一齿,因而可得到很大传动比,一般在动力传动中,取传动比I=10-80;在分度机构中,I 可达1000。
这样大的传动比如用齿轮传动,则需要采取多级传动才行,所以蜗杆传动结构紧凑,体积小、重量轻。
一般来说,蜗杆头数越多,传动效率越高,但加工会更加困难。
蜗杆的头数又可以叫做蜗杆的条数。
i=蜗杆转速n1蜗轮转速n2 =蜗轮齿数z2蜗杆头数z1(2)齿数Z2 利用减速比和查表得出(具体表格详见涡轮尺寸表)2.选定模数-确定蜗杆直径系数和蜗杆尺寸(1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt 为标准模数。
对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。
表A选取模数m=4(也可以根据需要选取其他值)分度圆直径d1=40.蜗杆直径系数q=103.计算中心距得a=40+160/2=1004.涡轮尺寸表特性系数:蜗杆的分度圆直径与模数的比值称为蜗杆特性系数。
机械2010年增刊 总第37卷 ·43·———————————————收稿日期:2010-03-25作者简介:向国玲(1974-),湖南永州人,工学学士,讲师,主要研究方向为模具CAD/CAM 。
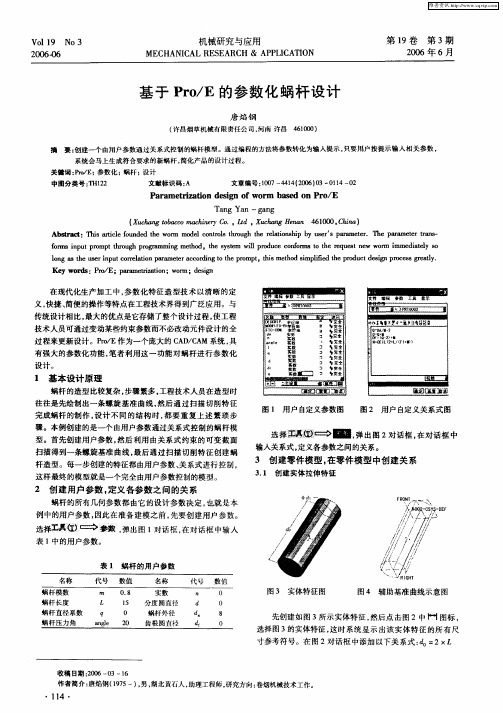
基于Pro/E 的蜗杆参数化设计向国玲(永州职业技术学院,湖南 永州 425000)摘要:创建一个由用户设计参数再通过关系式来控制的蜗杆模型。
通过编程的方法将参数转化为输入提示,只要用户按提示输入相关参数,系统会马上生成符合要求的新的阿基米德蜗杆,大大地简化了产品设计造型。
关键词:Pro/E ;参数化;蜗杆;设计参数化技术是当前CAD 技术重要的研究领域之一。
所谓参数化设计是指参数化模型的尺寸用对应的关系表示,而不需用确定的数值,变化一个参数值,将自动改变所有与它相关的尺寸,也就是采用参数化模型,通过调整参数来修改和控制几何形状,自动实现产品的精确造型。
参数化设计技术以其强有力的草图设计、尺寸驱动修改图形功能,成为初始设计、产品建模及修改系列设计、多方案比较和动态设计的有效手段。
目前,市场上已经有很多成熟的三维设计软件。
这些软件最大的特点是易学易用、功能强大、链接兼容性好,最显著的优点在于基于特征的完全参数化设计方式保证了产品设计的合理性和高效性,直观反映出产品的真实几何形状、代码,以实现无图纸加工。
与传统的二维设计相比,三维参数化设计更符合人们的思维习惯且可视化程度高,它已成为今后机械设计的主流方向。
Pro/E 作为一个庞大的CAD/CAM 系统,具有强大的参数化功能,笔者就是利用这一功能对蜗杆进行参数化设计。
基本设计原理:蜗杆的造型相对来讲比较复杂,步骤比较多,在设计时首先绘制出一条螺旋基准曲线,然后通过扫描切削特征完成蜗杆的制作,工程技术人员在制作不同的产品类型时都要进行相同的操作显得非常的烦琐。
而本例创建的是一个由用户参数通过关系式控制的蜗杆模型。
首先创建一个用户参数,然后利用由关系约束的可变截面扫描得到一条螺旋基准曲线,最后通过扫描切削特征来创建蜗杆造型。
摘要介绍了蜗杆涡轮形状的数学描述,实现蜗杆涡轮精确三维实体造型的方法。
在Pro/E环境下,建立了蜗杆涡轮的数学模型。
介绍了基于Mechanism的机构运动仿真的基本工作流程,对Pro/E进行二次开发,实现看蜗杆涡轮的参数化三维实体设计,通过机构的运动仿真,动态观看运动仿真的啮齿和运动情况,测试机构的有关运动性能的参数,有利于机构优化和提高设计效率,可以构成机构的虚拟设计、制造及仿真分析的平台。
关键字:Pro/E;蜗杆涡轮;参数化设计;运动仿目录序言---------------------------------------------------------------错误!未定义书签。
第一章 ------------------------------------------------------------2 1.1了解蜗杆涡轮的传动特点------------------------------------ 2 1.2了解蜗杆涡轮相关参数的查取方法---------------------------- 2 1.3涡轮蜗杆的应用-------------------------------------------- 3 第二章 Pro/E的基本建模-------------------------------------------- 4 2.1 渐开线形成原理--------------------------------------------4 2.2渐开线的特征----------------------------------------------4 2.4蜗杆涡轮基本参数------------------------------------------4 2.4啮合蜗杆蜗轮的建模----------------------------------------4 2.5蜗杆的参数化过程------------------------------------------4 2.6涡轮的绘制------------------------------------------------5 第三章涡轮的创建------------------------------------------------ 6 3.1涡轮的建模分析------------------------------------------- 63.2 涡轮的建模过程------------------------------------------- 6 3.2.1创建参数---------------------------------------------6 3.2.2创建齿轮基本圆---------------------------------------7 3.2.3创建齿廓曲线-----------------------------------------8 3.2.4 创建扫引轨迹----------------------------------------113.2.5 创建圆柱--------------------------------------------123.2.6变截面扫描生成第一个轮齿---------------------------- 133.2.7阵列创建轮齿---------------------------------------- 14 第四章蜗杆的创建-------------------------------------------------16 蜗杆的建模-------------------------------------------------16第五章结论--------------------------------------------------------22 第六章致谢词------------------------------------------------------23 参考文献-----------------------------------------------------------24序言Pro/E是由美国PTC公司推出的一套博大精深的三维CAD/CAM参数化软件系统,其内容涵盖了产品从概念设计、工业造型设计、三维模型设计、分析计算、动态模拟与仿真、工程图输出到生产加工成产品的全过程,其中还包含了大量的电缆及管道布线、磨具设计与分析等实用模块,应用范围涉及航天、汽车、机械、数控(NC)加工及电子等诸多领域。
以下运用Pro/E设计蜗杆涡轮的参数化。
第一章蜗轮蜗杆1.1什么是蜗轮蜗杆蜗轮蜗杆机构常用来传递两交错轴之间的运动和动力。
蜗轮与蜗杆在其中间平面内相当于齿轮与齿条,蜗杆又与螺杆形状相似。
1.2涡轮蜗杆的特点1.可以得到很大的传动比,比交错轴斜齿轮机构紧凑2.两轮啮合齿面间为线接触,其承载能力大大高于交错轴斜齿轮机构3.蜗杆传动相当于螺旋传动,为多齿啮合传动,故传动平稳、噪音很小4.具有自锁性。
当蜗杆的导程角小于啮合轮齿间的当量摩擦角时,机构具有自锁性,可实现反向自锁,即只能由蜗杆带动蜗轮,而不能由蜗轮带动蜗杆。
如在其重机械中使用的自锁蜗杆机构,其反向自锁性可起安全保护作用。
5.传动效率较低,磨损较严重。
蜗轮蜗杆啮合传动时,啮合轮齿间的相对滑动速度大,故摩擦损耗大、效率低。
另一方面,相对滑动速度大使齿面磨损严重、发热严重,为了散热和减小磨损,常采用价格较为昂贵的减摩性与抗磨性较好的材料及良好的润滑装置,因而成本较高6.蜗杆轴向力较大1.3涡轮蜗杆的应用蜗轮及蜗杆机构常被用于两轴交错、传动比大、传动功率不大或间歇工作的场合第二章Proe的基本建模2.1 渐开线形成原理一条直线(即发生线)沿着半径为rb 的基圆做纯滚动,直线上任一点K 的形成的轨迹AK 就叫做该圆的渐开线。
2.2 渐开线的特性(1) 发生线沿着基圆滚过的长度等于基圆上被滚过的圆弧长度。
(2) 渐开线上任意一点的法线恒与基圆相切。
(3) 渐开线愈接近于基圆的部分其曲率半径愈小;离基圆愈远曲率半径则越大。
(4) 渐开线的形状取决于基圆的大小。
在展角相同的情况下,基圆的大小不同渐开线的曲率也不同。
基圆半径愈小,其渐开线的曲率半径愈小;基圆半径愈大,其渐开线的曲率半径愈大;当基圆半径为无穷大时,其渐开线变成一条直线。
(5) 基圆内无渐开线。
2.3 蜗杆蜗轮基本参数模数 m、压力角α、蜗杆直径系数q、导程角γ、蜗杆头数Z1 、蜗轮齿数Z2、齿顶高系数ha (取1)及顶隙系数c(取0.2)。
其中模数m和压力角是指蜗杆轴面的模数和压力角,亦即蜗轮端面的模数和压力角且均为标准值;蜗杆直径系数q 为蜗杆分度圆直径与其模数m 的比值。
2.4 啮合蜗杆蜗轮的建模绘制一个模数m=4,头数Z1=2,直径系数为10,压力角=20°,与其啮合的蜗轮的齿数Z2=31。
2.5 蜗杆的参数化过程1. 通过设置新的坐标系CSO,使用坐标系类型为圆柱坐标系,通过方程的形式精确创建螺旋线:2. 选择FRONT 作为草绘平面,绘制四个同心圆,以便形成蜗杆。
sd0=124sd1 =124*cos(atan(tan(20)/cos(atan(2/10))))sd2=114.4sd3 =1323.选取CS2 坐标系作为曲线方程的坐标系,并设置坐标系类型为笛卡尔坐标系,然后在记事本中输入渐开线方程:r=62*cos(atan(tan(20)/cos(atan(2/10))))theta=t*60x=r*cos(theta)+r*sin(theta)*theta*pi/180y=r*sin(theta)-r*cos(theta)*theta*pi/180z=0绘制出的渐开线形状(箭头所指的曲线)4.选择创建的渐开线,通过选择RIGHT 基准面作为镜像平面,进行镜像操作,然后进行拉伸操作,圆柱直径为30.4,长度为100。
5.再使用扫描混合功能绘出渐开线齿形。
6.通过“编辑”/“特征操作”完成双头蜗杆的绘制。
7.完整的蜗杆模型。
2.6 蜗轮的绘制1.类似于蜗杆的绘制方法,渐开线的生成方程与蜗杆相同,箭头所指的是生成的渐开线齿廓。
2.旋转特征的创建绘制一条中心线使其附着到RIGHT 平面,圆的直径为20,圆心到中心线的距离为80,通过“旋转”工具生成旋转曲面。
3.蜗轮外圈的生成使用“旋转”工具按钮和倒角,快速生成蜗轮外圈主体。
4. “扫描混合”、“阵列”,最后完成渐开线蜗轮的实体。
第三章蜗轮的创建3.1 蜗轮的建模分析(1)创建参数(2)创建齿轮基本圆(3)创建齿廓曲线(4)创建扫引轨迹(5)创建圆柱(6)变截面扫描生成第一个轮齿(7)阵列创建轮齿3.2 蜗轮的建模过程3.2.1.创建参数打开PROE,在菜单中点击工具,选择菜单,然后设置参数,如下图3.2.2.创建齿轮基本圆(1))绘制蜗轮基本圆曲线。
在工具栏内单击按钮,弹出“草绘”对话框,选择“FRONT”面作为草绘平面,选取“RIGHT”面作为参考平面,参考方向为向“右”,如图3-189所示;单击【草绘】进入草绘环境;(2)进入草绘以后,点击圆,画4个圆,退出草图,然后设置参数3.2.3.创建齿廓曲线(1)创建渐开线。
在工具栏内单击按钮,弹出“曲线选项”对话框,点击从方程,单击选取基准坐标系PRT_CSYS_DEF作为参照。
系统弹出设置坐类型菜单管理器,单击笛卡尔在系统弹出的记事本窗口中输入曲线方程为:r=72.66/2Theta=t*45x=r*cos(theta)+r*sin(theta)*theta*pi/180y=r*sin(theta)-r*cos(theta)*theta*pi/180z=0(3)在曲线定义对话框内,点击确定完成渐开线的创建。
如图:(4) 镜像渐开线。
在工具栏内单击按钮,创建分度圆曲线与渐开线的交点,如图所示:(5)在工具栏内单击按钮,弹出“基准轴”对话框,通过2个面创建一条基准轴。
如下图:(6)在工具栏内单击按钮,弹出“基准平面”对话框,选择一条基准轴和基准点创建一个基准平面。
如图(7)在工具栏内单击按钮,弹出“基准平面”对话框,在“旋转”文本框内输入旋转角度为3,在“基准平面”对话框内单击确定完成基准平面的创建,如图(8)单击选取渐开线,点击镜像单击选取“DTM3”面作为参照平面,单击√完成渐开线的创建。
3.2.4创建扫引轨迹(1)创建投影曲面。
在工具栏内单击旋转按钮,弹出“旋转”定义操控面板,在面板内选择曲面旋转,然后单击“放置”→“定义”,弹出“草绘”定义对话框,用DTM3作为平面。