单立柱有轨巷道式堆垛机运行过程的仿真分析
- 格式:pdf
- 大小:183.94 KB
- 文档页数:3

有轨巷道式堆垛机机械结构的研究有轨巷道式堆垛机机械结构的研究引言:随着物流行业的快速发展,堆垛机在仓储装卸作业中起着关键作用。
有轨巷道式堆垛机(AS/RS)是一种高度自动化的设备,可以实现自动化存储和检索货物。
机械结构是有轨巷道式堆垛机的核心部分,对于其运行稳定性、效率和安全性具有重要影响。
本文将探讨有轨巷道式堆垛机机械结构的研究现状,并对其发展趋势进行展望。
一、有轨巷道式堆垛机机械结构的现状1.1 单立柱型结构单立柱型结构是最常见的有轨巷道式堆垛机结构之一。
其具有结构简单、制造成本低等优点,但存在载荷能力有限、受力不均匀等缺点。
1.2 双立柱型结构双立柱型结构通过增加立柱数量提高了堆垛机的稳定性和工作效率。
其适用于大型堆垛机和高负载情况,但制造和安装难度较大。
1.3 桁架型结构桁架型结构是一种近年来较为流行的有轨巷道式堆垛机机械结构。
其具有结构刚性好、自重轻、稳定性高等优点,适用于高速堆垛机和大跨径情况。
二、有轨巷道式堆垛机机械结构的优化与改进2.1 结构刚性的优化有轨巷道式堆垛机在高速运行时,机械振动和变形会对其运行稳定性产生不利影响。
为了提高结构刚性,可以通过增加支撑点、加强关键节点等方式进行优化。
同时,在结构设计中采用优化算法进行优化,以求得更优的结构刚性。
2.2 堆垛机轨道的设计与改进堆垛机轨道是承载并导向堆垛机运动的重要部分。
为了提高堆垛机的稳定性和运行效率,可以采用闭合型轨道结构,增加辅助导向装置,使得堆垛机在运动过程中更加平稳。
2.3 悬臂结构的优化悬臂结构是堆垛机的重要组成部分,直接影响到其抓取货物的能力和稳定性。
通过对悬臂结构的优化,可以提高其刚性和强度,增加载荷能力和工作效率。
三、有轨巷道式堆垛机机械结构的发展趋势3.1 智能化随着信息技术的不断发展,有轨巷道式堆垛机逐渐向智能化方向发展。
通过引入自动识别、无线通信等技术,提高堆垛机的自动化程度和智能化水平,进一步提升其效率和安全性。


巷道式堆垛机运行的工艺流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!巷道式堆垛机是一种常用于物流中心和仓储行业的自动化设备,其主要功能是在高层货架上进行货物的堆垛和拣选作业。

单立柱堆垛机机架的力学分析与结构优化黄超;呼英俊;董颖怀【摘要】机架是巷道堆垛机的重要组成部分,承担了绝大部分载荷和惯性力,其中立柱受到应力集中和挠度影响最大.因此,堆垛机立柱的力学性能影响着整机的安全及运行效率.通过Solidworks建立单立柱堆垛机机架模型,结合ABAQUS对模型进行静力分析和模态分析,从理论上验证设计方案的合理性、可靠性和安全性.在静力分析结果的基础上,针对不足之处对立柱结构提出3种优化措施.经比较选定优化方案:立柱高度和壁厚保持不变,纵向截面上底减小为0.56,m,下底增大为0.68,m.优化后,机身增重0.8%,,最大应力增大1.1%,,立柱挠度减小了11.4%,,刚度性能显著提高.【期刊名称】《天津科技大学学报》【年(卷),期】2018(033)004【总页数】6页(P61-66)【关键词】单立柱堆垛机;有限元;静力分析;模态分析;结构优化【作者】黄超;呼英俊;董颖怀【作者单位】天津科技大学机械工程学院,天津 300222;天津科技大学机械工程学院,天津 300222;天津科技大学机械工程学院,天津 300222【正文语种】中文【中图分类】TH246;TP203在工业生产飞速发展的今天,仓储物流技术水平的提升势在必行.堆垛机是自动化立体仓库的重要设备,是物资流动的重要载体,提高堆垛机的存取货速度是实现自动化立体仓库高效运行的关键[1].单立柱堆垛机作业时,机架将会受到自身重力和货物重力的作用,行走、制动和加减速的水平惯性力作用,以及起吊时冲击载荷作用,导致立柱和横梁发生弯曲、扭转变形,从而使立柱发生疲劳,产生应力集中现象,影响整机的平稳性.因此,为了保证堆垛机作业过程中的安全性与可靠性,提升堆垛机运行过程中的平稳性,对堆垛机进行动静态性能分析及结构优化具有非常重要的意义[2-3].近年来,国内外专家学者对堆垛机的动态特性均进行了一些具有价值的分析研究:李坚[4]构建了堆垛机的运动学模型与动力学模型,运用运动学、动力学和刚体接触动力学方法对动态特性进行分析;孙军艳等[5]利用 ADAMS软件构建堆垛机简化模型并进行动力学仿真;Randhawa等[6]对堆垛机存取车命令的执行顺序进行分析;Taboun等[7]对堆垛机位置检测进行研究.国内外对堆垛机的研究都取得了一定的进展,但我国堆垛机的结构方面还存在一定不足,在对堆垛机进行结构设计、分析与优化过程中采用的方法单一,普遍采用传统方法计算强度和刚度,操作复杂,精度较低,工作周期长,工作强度大;并且优化只针对某一不足之处,缺乏对比性,难做到最优[8].有限元分析方法用简单问题代替复杂问题,能够适应各种复杂形状,其计算精度高,可靠性强,实用性强,是处理复杂工程问题的重要分析手段[9].本文结合生产实践,通过分析单立柱堆垛机功能和基本结构进行整体设计,运用有限元分析方法对机架进行静力分析与模态分析,验证模型的可行性,并进行结构优化.1 有限元模型的建立设定堆垛机运行的排、层和列方向分别为模型的x轴、y轴和z轴.1.1 单立柱堆垛机结构设计设计的单立柱堆垛机,最大起升高度 9,m,自身质量 3,512,kg,额定载荷1,000,kg,水平运行速度5,m/s,水平运行加速度 0.3,m/s2.单立柱堆垛机的结构简图如图1所示,主要由立柱、上横梁、下横梁、载货台、水平行走机构、升降机构、货物存储机构(货叉及驱动装置)和控制柜等部分构成.图1 单立柱堆垛机结构图Fig. 1 Structure of the single column stacker1. 上横梁;2. 立柱;3. 升降机构;4. 货物存储机构;5. 载货台;6. 控制柜;7. 下横梁;8. 水平行走机构为便于运用有限元软件ABAQUS对堆垛机进行分析计算,在利用 Solidworks软件建模时,对堆垛机模型进行了必要的简化,以缩减模型规模.堆垛机的有限元模型见图2.图2 单立柱堆垛机有限元模型Fig. 2 Finite element model of the single column stacker1. 载货台矩形框;2. 箱形立柱;3. 升降机构质量块;4. 控制柜质量块;5. 箱形下横梁;6. 行走轮组质量块立柱顶端轮组及上横梁质量较小,主要作用是防止机身在 x轴方向倾倒,在建模时舍去该部分,并在有限元分析时施加x方向的等效约束;载货台简化为矩形框,分为上下两处与立柱相结合,以符合工作实际;立柱、下横梁均为厚度 0.01,m 的箱形结构;提升机构简化为质量块,与立柱结合;电气控制机柜简化为质量块,与下横梁结合;下横梁两端的轮组主要起水平导向和支撑作用,在此简化为 2个质量块;其余细小且不易引起应力集中的结构(如倒角)在建模时均进行了简化.1.2 定义材料和网格划分材料属性与几何模型不同,代表着材料本身具有的属性,比如强度、密度、硬度等.本文对堆垛机进行单元分析计算时需要设置材料属性,根据堆垛机自身性能和实际需要,选取 Q235A作为机身材料,其属性参数为:密度 7,800,kg/m3,弹性模量2.1×1011,Pa,泊松比0.26.运用有限元软件对模型进行计算分析时,布尔运算容易导致出现错误,因此在建模时将模型生成一个整体[10].在ABAQUS中先将模型分割成5个质量单元,再分别布种子、划分网格.单元形状选择六面体,单元类型为C3D8R,采用结构化网格划分技术,最终划分的有限元网格单元总数约为13,000.1.3 约束和加载由工程实际分析得出,载货台位于最高位满载且堆垛机沿z轴负向以0.3,m/s2的最大水平加速度瞬时启动时,机架尤其是立柱受到的冲击最大,此时堆垛机处于最危险的状态.运用极限法,将上述瞬时运动状态转化为静止状态进行研究.施加约束时,选择对模型影响较小的节点或面进行施加,以避免过约束引起不合实际的应力集中影响计算结果的准确性.结合堆垛机的工作实际,约束和加载图见图3.图 3中,为防止机身倾倒,在立柱顶端上横梁行走轮的等效位置选取两个点,约束该两个点在x方向的自由度;对下横梁行走轮质量块的底面施加全位移约束.图3 堆垛机约束和加载图Fig. 3 Constraint and loading of the stacker通过对机身施加沿y轴负向、大小为9.8,m/s2的重力加速度,实现机身重力加载;通过对机身施加 z轴方向、大小为 0.3,m/s2的水平加速度,实现其自身惯性力的加载;货物的重力以压强的形式施加到矩形框的上表面;启动时货物产生沿z轴方向的惯性力作用于机身,因此,在矩形框等效位置施加 z轴方向集中力 F(F=m货a=300,N).同时,对堆垛机机架强度、刚度影响不大的细小构件忽略不计.2 静力分析通过 ABAQUS运行计算,得到堆垛机的变形云图如图4所示,应力云图如图5所示.由图 4可知,在最大动载荷作用下,立柱顶端的挠度为9.666×10–3,m.根据经验公式[13],堆垛机立柱的许用挠度为[f]=H/2,000~H/1,000=4.5~9,mm,堆垛机立柱不满足刚度要求,需进行优化.由图5可知,堆垛机机架的最大应力出现在载货台与立柱的下方结合部位,为6.088×107,Pa的压应力.此外,立柱根部与下横梁结合处的压应力接近4×107,Pa.Q235A 材料的屈服强度δs=2.35×108,Pa,选择安全系数[s]=2,材料的许用应力[δ]=δs/[s]=1.175×108,Pa.最大应力小于材料的许用应力,满足强度要求.图4 堆垛机变形云图Fig. 4 Deformation nephogram of the stacker图5 堆垛机应力云图Fig. 5 Stress nephogram of the stacker3 模态分析堆垛机结构的动态特性是影响堆垛机定位精度、稳定性的重要因素[11],可以通过模态分析解决堆垛机稳定性差的问题.运用 ABAQUS有限元软件对堆垛机模型进行模态分析,不仅可以得到其固有频率,还可以获得机架在相应振动频率下的振型特征,有助于清楚认识机架对不同类型的动载荷如何响应[12].高阶频率对堆垛机结构的动力性影响较小,所以在ABAQUS分析时只提取前6阶频率.通过分析计算得到工况载荷下前6阶固有频率及前6阶振型,如图 6所示.从图 6可以看出:第一阶振型以立柱沿 z轴的弯曲变形为主;第二阶振型以立柱在xoz平面内的扭曲变形为主;第三阶振型以立柱沿x轴负向的弯曲变形为主,并且载货台框架有扭曲变形;第四阶振型是载货台沿 y轴方向的弯曲变形和立柱沿 z轴负向的弯曲变形为主;第五阶和第六阶振型,整个机架发生了较复杂的弯曲扭转变形.图6 单立柱堆垛机前6阶模态振型图Fig. 6 The mode shapes of the first six orders of the single column stacker结构设计时,应该注意避免共振现象的发生.立体仓库堆垛机水平行走的地轨不是一段完整的钢轨,虽然在铺设时对焊接工艺要求高,使其尽可能平滑,但焊缝仍对行走轮产生激励[14].本文设计中堆垛机两行走轮的轴心距为 3.3,m,若堆垛机以5,m/s的速度水平运行,受到的激励频率为 1.515,Hz,小于堆垛机的第一阶频率3.006,7,Hz.堆垛机运行安全.4 堆垛机立柱的结构优化工况载荷下,堆垛机受力情况较为复杂,尤其是立柱作为堆垛机的核心机构,受到的冲击最大.由上述静力分析结果得出,堆垛机的强度满足设计要求,但立柱顶端的挠度较大,不满足刚度设计要求.因此,需要对堆垛机的立柱结构进行优化.4.1 结构优化方案堆垛机立柱由厚度 0.01,m的钢板焊接而成,且立柱的弯曲变形主要是沿z轴方向发生的,因此确定改进思路为:在不改变钢板厚度和立柱高度的前提下,通过增大立柱箱形横向截面沿z轴方向的有效尺寸,增强立柱的抗弯能力,从而减小立柱顶端挠度.立柱在yoz面的纵向截面示意图见图7.图7 yoz面内的立柱截面图Fig. 7 Vertical section diagram of the column on yoz surface立柱高度为 9,m,设截面上底、下底长度分别为A、B.初始方案中,A=B=0.60,m;优化过程中,通过参数化建模,以A、B长度为优化对象,以减小立柱顶端挠度为优化目标,结合机身总质量和所受最大应力两项指标,提出3种优化方案.方案 1:A、B 均增大,分别同时取 0.61、0.62、0.63、0.64、0.65,m,重新建模后的有限元静力分析结果见表1.表1 方案1分析结果Tab. 1 Analysis results of scheme 1A/m B/m 总质量/kg 最大应力/Pa 立柱挠度/m 0.61 0.61 3,525.238 6.069×107 9.275×10-3 0.62 0.62 3,539.278 6.067×107 9.130×10-3 0.63 0.63 3,553.318 6.045×107 8.911×10-3 0.64 0.64 3,567.358 6.016×107 8.694×10-3 0.65 0.653,581.399 5.987×107 8.406×10-3与初始方案比较,方案1中,随着A、B长度的逐渐增大,机身质量逐渐增加,最大应力逐渐减小,立柱挠度也呈减小趋势,从第 3组数据 A、B同时增加到0.63,m 开始,立柱挠度减小到许用挠度值9×10-3,m以下,立柱刚度满足要求.方案2:A不变,为0.6,m,B增大,分别取0.62、0.64、0.66、0.68、0.70,m,重新建模后的有限元静力分析结果见表2.表2 方案2分析结果Tab. 2 Analysis results of scheme 2A/m B/m 总质量/kg 最大应力/Pa 立柱挠度/m 0.60 0.62 3,525.238 6.084×107 9.069×10-3 0.60 0.64 3,539.279 6.081×107 8.811×10-3 0.60 0.66 3,553.3186.059×107 8.672×10-3 0.60 0.68 3,567.358 6.022×1078.487×10-3 0.60 0.70 3,581.398 6.003×107 8.291×10-3与初始方案比较,方案2中,随着B长度的逐渐增大,机身质量逐渐增加,立柱的最大应力呈减小趋势,立柱挠度也逐渐减小,从B增加到0.64,m开始,立柱挠度减小到许用挠度9×10-3,m以下,立柱刚度满足要求.方案3:A减小,B增大,A和B分别取0.58,m和0.64,m、0.56,m 和 0.68,m、0.54,m 和 0.72,m、0.52,m和0.76,m、0.50,m和0.80,m,重新建模后的有限元静力分析结果见表3.表3 方案3分析结果Tab. 3 Analysis results of scheme 3A/m B/m 总质量/kg 最大应力/Pa 立柱挠度/m 0.58 0.64 3,525.238 6.115×107 8.897×10-3 0.56 0.68 3,539.279 6.156×107 8.561×10-3 0.54 0.72 3,553.3196.173×107 8.268×10-3 0.52 0.76 3,567.359 6.203×107 7.971×10-3 0.50 0.80 3,581.398 6.285×107 7.668×10-3与初始方案比较,方案3中,随着A长度的减小和 B长度的增大,机身质量逐渐增加,立柱的最大应力呈增大趋势,立柱挠度呈减小趋势,在 5组数据中,立柱挠度均在许用挠度9×10-3,m 以下,满足刚度要求.4.2 结构优化分析3种优化方案均对减小立柱挠度有效果,可以使立柱刚度满足要求.对比后发现:在堆垛机总质量增加相近的情况下,方案 3中立柱挠度的减小情况最好,其次是方案2,最后是方案1.例如选取3种方案的第4组数据:方案1、方案2、方案3中堆垛机总质量均约为 3,567,kg,质量增幅 1.57%,,立柱挠度值依次为8.694×10-3,m、8.487×10-3,m、7.971×10-3,m,挠度降幅依次为 10.06%,、12.20%,、17.56%,,虽然方案 3中立柱的最大应力比改进前略微增大,但是增幅仅为1.85%,,且远小于材料的许用应力.由此可得,针对挠度值的优化方案中,方案3的效果更明显.方案 3中各组模型立柱的挠度均减小到了许用值以下,综合考虑 5组数据中机身质量、最大应力的变化幅度以及立柱挠度的优化效果,最终选定优化方案:立柱高度和壁厚保持不变,纵向截面上底减小为0.56,m,下底增大为 0.68,m.较初始方案,机身增重0.8%,,最大应力6.156×107,Pa,增大 1.1%,,特别是立柱挠度8.561×10-3,m,减小 11.4%,,满足刚度设计要求.经模态分析,此优化模型的第一阶固有频率为3.660,8,Hz,大于所受到1.515,Hz的激励频率.因此,优化结果满足设计要求,效果明显.5 结语运用ABAQUS有限元软件对所设计的单立柱堆垛机进行动静态分析,发现在最大动载荷作用下,该机型的强度符合设计要求,以最大水平速度运行时,满足振动要求,但立柱的顶端挠度值大于规定的允许挠度值,不符合刚度要求.以增大箱形横截面沿立柱弯曲方向的有效高度为思路,提出了 3种结构优化方案.通过参数化建模和静力分析可知,3种优化方案对立柱挠度的减小均有效果,都可以使立柱刚度满足设计要求.进一步对比得出:在机身自重相近的情况下,减小立柱纵向截面上底,增大纵向截面下底,此时立柱顶端的挠度减小幅度最大,优化效果最显著.参考文献:【相关文献】[1]王凌琳,袁庆霓,吕健. 双立柱巷道堆垛机的动静态性能分析及结构优化[J]. 机械设计与制造,2016(9):183-187.[2] Geng J T,Lu Y X,Yang H J,et al. The Design of Stereoscopic Warehouse Stacker’ Motion and Control System[C]//Proceedings of the International Conference on Automation and Robotics. Heidelberg,Germany:Springer Verlag,2011:135-139.[3]万欣欣. 高速运动堆垛机的结构稳定性研究[D]. 昆明:昆明理工大学,2011.[4]李坚. 单立柱有轨巷道式堆垛机结构及多体系统动态仿真分析[D]. 重庆:重庆大学,2006. [5]孙军艳,曹西京,汤建明,等. 堆垛机的有限元模态分析[J]. 轻工机械,2005,23(2):46-48.[6] Randhawa S U,Shroff R. Simulation-based design evaluation of unit load automated storage/retrieval systems[J]. Computers and Industrial Engineering,1995,28(1):71-79.[7] Taboun S M,Bhole S D. A simulator for an automated warehousing system[J]. Computers & Industrial Engineering,1993,24(2):281-290.[8] Liu P F,Xing L J,Liu Y L,et al. Strength analysis and optimal design for main girder of double-trolley overhead traveling crane using finite element method[J]. Journalof Failure Analysis and Prevention,2014,14(1):76-86.[9]钟锡波. 立体仓库高速堆垛机的动力学分析[D]. 沈阳:东北大学,2009.[10]于艳. 基于 ANSYS的堆垛机结构力学分析[D]. 大连:大连交通大学,2009.[11]李阳. 自动化立体仓库及其堆垛机研究[D]. 哈尔滨:哈尔滨理工大学,2012.[12]龚秋生. 堆垛机的机械结构及控制系统设计研究[D].沈阳:沈阳理工大学,2013.[13]刘昌祺. 自动化立体仓库设计[M]. 北京:机械工业出版社,2004.[14]郑玉巧,黄建龙,张淑珍,等. 单立柱巷道式堆垛机有限元模态分析[J]. 机械与电子,2010(5):22-24.。

图书分类号:密 级:摘要本文详细论述了普遍应用在现代大中型企业中的单立柱有轨巷道式堆垛机的设计方 案。
文中对堆垛机的分类,特点及其构造进行了详细的叙述。
堆垛机是自动化立体仓库中 最重要的起重堆垛设备,是随着立体仓库的出现而发展起来的专用起重机。
它能够在自动 化立体仓库的巷道中来回穿梭运行,将放置在巷道口的货物存入指定的货格,或者从货格 中取出货物运送到巷口。
设计重点主要包括:堆垛机的机架、升降机构、行走机构、货叉伸缩机构以及安全机 构。
文章在确定堆垛机的总体设计方案的前提下, 再对各个机构进行受力分析和设计计算, 最后进行必要的相关校核并最终确定各个的机构实际取值。
本次的毕业设计运用多种起重机的现代设计方法,特别是运用计算机辅助设计(CAD) 的方法,在计算机上将堆垛机的设计图纸CAD 化,大大提高了设计的效率,节省时间。
关键词: 自动化立体仓库;堆垛机;升降机构;行走机构;货叉伸缩机构;安全机构AbstractThis article has discussed the design of the singlepillar type of NarrowAisle Stacker Crane which has been universally used in modern most enterprises in detail. This article described the kinds of stakers, features and the structure in detail. Stacker cranes is the most important part of the automation threedimensional storehouse among the take heavy crane pile up equipment, it can in the tunnel of automation cube in the shuttle operation of round trip, will locate in tunnel the goods of mouth stock goods shelf; or opposite take out the goods transit in goods shelf go to tunnel mouth.The design focus mainly include: The stacker's rack, walk organization, fork telescoping mechanism and safe organization. Under the premise of overall design scheme of stacking crane, then for organization analyze by force condition calculate. Finally, check nuclear necessarily and definite every numerical.This Graduation Design use many kinds of Modern Designs of the crane, especially to use the method of Computeraided design(CAD),Stackers will be the design drawings of the CAD on the computer, which greatly improve the efficiency of the design and saving time.Keywords: Automation threedimensional storehouse Stacker Crane Movement organization Walk organization Fork telescoping mechanism Safe organization目 录1引言 (1)1.1 研究背景及意义 (1)1.2 研究的内容及设计思路 (1)1.2.1 主要设计内容 (1)1.2.2 设计要求 (1)1.3 研究的发展趋势 (2)1.4 堆垛机所受载荷的简化方法 (2)2 堆垛机的整体结构设计方案 (4)2.1 堆垛机结构的主要结构组成 (4)2.2 单立柱有轨巷道式堆垛机的特点 (5)2.3 堆垛机的机架结构 (5)2.4 堆垛机伸缩货叉的结构设计 (5)2.5 堆垛机起升机构的整体设计 (6)2.5.1 柔性件的选取 (6)2.5.2 卷筒的选取 (6)2.5.3 电动机的选取 (7)2.5.4 减速器的选取 (7)2.5.5 制动器的选取 (8)2.6 堆垛机行走机构的整体设计 (9)2.6.1 驱动方式的选取 (9)2.6.2 车轮的的设计 (9)2.6.3 电动机的选取 (10)2.6.4 减速器的选取 (10)2.6.5 制动器的选取 (10)2.7 轨道的设计与安装 (10)2.8 堆垛机的控制装置 (10)3堆垛机机架的结构设计计算 (13)3.1 机架立柱的尺寸设计 (13)3.2 机架的上、下横梁设计 (14)3.3 框架结构的设计数据 (14)4堆垛机伸缩货叉机构的设计计算 (15)4.1 伸缩货叉的扰度与强度 (15)4.1.1 下叉的受力分析计算 (15)4.1.2 中叉的受力分析计算 (16)4.1.3 上叉的设计分析计算 (17)4.2 货叉各参数的选择 (18)5堆垛机行走机构的设计计算 (19)5.1 行走机构电动机的选取 (19)5.2 堆垛机行走轮的设计计算 (19)5.3 行走机构减速器的选取 (20)5.4 行走机构联轴器的选择 (20)6堆垛机升降机构的设计计算 (21)6.1 升降机构零部件的设计计算 (21)6.1.1 钢丝绳的计算 (21)6.1.2 卷筒的相关尺寸计算 (21)6.2 升降机构传动装置的选取 (22)6.2.1 电动机的选择 (22)6.2.2 减速器的选择 (22)结论 (23)致谢 (24)参考文献 (25)附录 (26)附录1 (26)1 引言随着世界经济的持续发展和科学技术的突飞猛进以及经济全球化的趋势的加强,各国 面临着前所未有的机遇和挑战。
基于ANSYS的堆垛机结构设计与仿真摘要:堆垛机是自动化立体仓库的关键组成部分,其工作性能直接影响到仓储系统的运行性能。
本文在对堆垛机的各组成部分工作参数和安全可靠性进行分析的基础上,设计了堆垛机的主要机械结构。
应用UG软件进行三维实体设计,导入ANSYS对主要的机构部分进行了有限元仿真分析。
仿真结果表明,堆垛机关键部件的设计满足了性能要求。
关键词:结构设计;有限元分析;堆垛机DOI:10.16640/ki.37-1222/t.2018.09.115堆垛机是集成机械、电子、计算机及自动控制等技术的机电一体化系统。
由于具有空间利用率高、存取货物效率高的特点,而且有利于采用计算机进行控制管理,已逐渐成为自动化立体仓库不可或缺的物流输送设备。
本文在堆垛机功能分析研究的基础上,设计了自动化堆垛机实验平台,并采用ANSYS软件对其实体模型进行了建模与仿真优化。
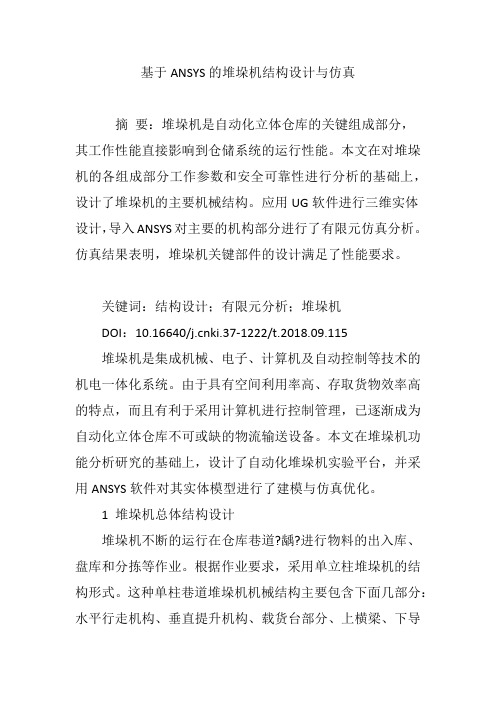
1 堆垛机总体结构设计堆垛机不断的运行在仓库巷道?龋?进行物料的出入库、盘库和分拣等作业。
根据作业要求,采用单立柱堆垛机的结构形式。
这种单柱巷道堆垛机机械结构主要包含下面几部分:水平行走机构、垂直提升机构、载货台部分、上横梁、下导轨、带滚珠丝杠和支撑导向杠的立柱和电气设备等,如图1所示。
2 基于ANSYS的堆垛机关键部件分析仿真有限元分析采用数学近似的方法完成对真实的物体模拟。
利用简单且相互作用的单元格,用有限数量的未知量去逼近无线未知量的真是系统。
有限元模型可以看作是由一个个小的分块部分构成的,或者在真实的结构上划线,通过这些真实结构被分离成一个一个的小部分。
2.1 堆垛机的主要机构的静态模型利用UG软件完成零件设计,然后进行装配。
如果将装配的实体模型导入到ANSYS 软件中分析,运算量大。
考虑到这一点后,使用UG软件对简化后的整机机构和载货台机构的模型进行建模设计,并转化为Parasoild的数据形式,将保存的.x_t格式的文件导进到ANSYS软件中进行后序分析。
0 引言自动化立体仓库目前广泛应用于智能制造物流供应链和自动化仓储领域中,有轨巷道堆垛机(以下简称堆垛机)已成为自动化仓库建设和运行中至关重要的核心设备,主要用于搬运和存取货物。
堆垛机的工作效率和工作稳定性决定着自动化立体仓库的整体运行效率。
常规堆垛机的结构按立柱形式分为单立柱堆垛机和双立柱堆垛机2种。
目前,欧洲大型物流仓储行业的一些设备供应商普遍使用单立柱堆垛机,日本大型物流仓储行业设备供应商则普遍使用双立柱堆垛机。
在我国,以北京起重运输机械设计研究院有限公司为代表的物流仓储行业设备供应商普遍使用单立柱堆垛机,只在超高、超重、多工位等特殊条件下选用双立柱堆垛机,而国内其他设备供应商普遍使用双立柱堆垛机。
单立柱堆垛机和双立柱堆垛机主要钢体结构由运行机构、立柱结构、起升机构和载货台等构成,其中单立柱堆垛机的立柱结构为单根箱形结构金属立柱,而双立柱堆垛机立柱结构为前后2根金属立柱,一般分为主副立柱,主立柱起主要支承作用,副立柱起辅助支承作用。
运行机构作为运行基础安装在地面导轨上,由电动机驱动前后运行;起升机构和载货台分别安装在立柱结构内外侧,起升电动机运转并带动起升机构卷筒轴转动,带动卷筒正反向转动,带动钢丝绳往复缠绕,从而带动载货台上下移动;立柱结构安装在运行机构下横梁上,作为堆垛机最主要的承载结构,立柱结构具有重要的支承、承载作用,必须保证足够的强度和刚度。
JB/T 7016—2017《巷道堆垛起重机》中规定:当起升高度大于10 m时,立柱结构的最大挠度不得超过堆垛机全高的1/1箱形单立柱有轨巷道堆垛机立柱机构研究张煜哲1,3 韩松涛2 张 辰1,3 岳森峰1,4 赵志理11北京起重运输机械设计研究院有限公司 北京 100007 2北方华锦联合石化有限公司 盘锦 1242003北京市自动化物流装备工程技术研究中心 北京 100007 4机械工业物料搬运工程技术研究中心 北京 100007摘 要:文中对物流仓储自动化立体仓库中的核心设备-箱形单立柱有轨巷道堆垛机和方管双立柱有轨巷道堆垛机的关键承载结构立柱结构进行了力学分析,基于有限元分析软件分析了2种结构危险工况下的最大挠度,将2种结构的力学分析数据、质量、成本等因素进行对比,明确了箱形单立柱有轨巷道堆垛机在力学性能和经济性上的优势,为有轨巷道堆垛机高安全性和高稳定性研究提供了参考方向和新的思路。