求解最短路径问题的DNA动态规划算法
- 格式:pdf
- 大小:185.57 KB
- 文档页数:3
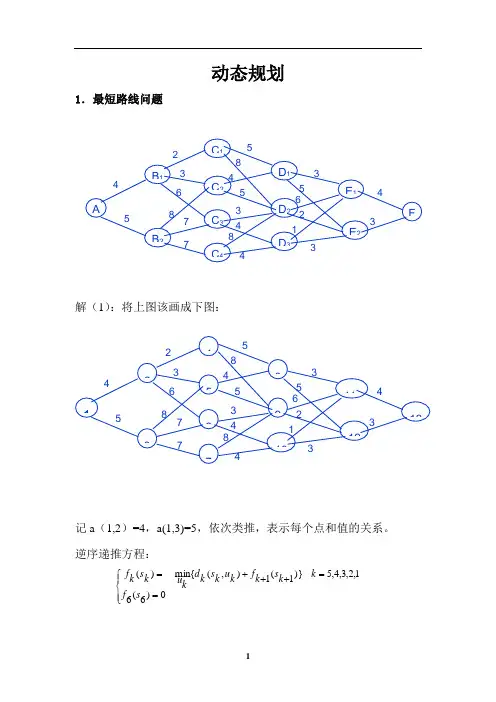
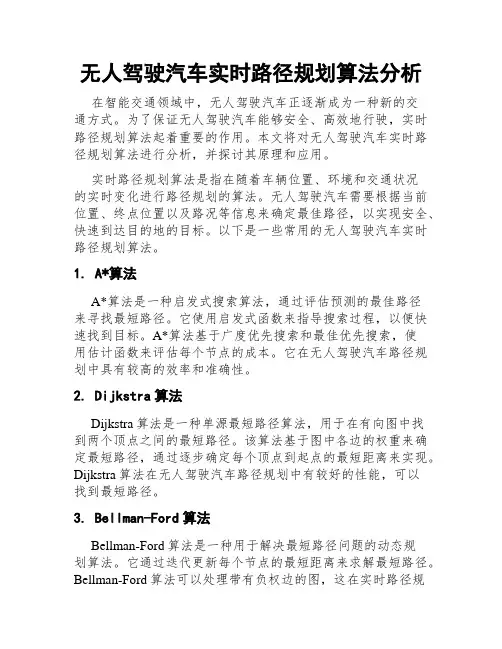
动态规划1.最短路线问题解(1):将上图该画成下图:记a (1,2)=4,a(1,3)=5,依次类推,表示每个点和值的关系。
逆序递推方程:⎪⎩⎪⎨⎧==+++=0)6(61,2,3,4,5)}1(1),({min )(s f k k s k f k u k s k d k uk s k fAB 1B 2C 1 C 2C 3 C 4D 1D 2 D 3E 1 E 2F4523 6 8 7 75845348435 6 2 314 31234 5 6 789 101112134523 6 8 7 7584534 8435 6 2 314 3如图各状态:逆序递推,找出上一个状态到下一阶段的最小路径值。
例如,当K=4时,状态 它们到F 点需经过中途 点E ,需一一分析从E 到 F 的最短路:先说从D1到F 的最短路 有两种选择:经过 E1, E2, 比较最短。
这说明由 D1 到F 的最短距离为7,其路径为AB 1B 2C 1 C 2C 3 C 4D 1 D 2 D 3E 1 E 2F4523 6 87 75845348435 62 31 4 3第1阶段 第2阶段 第3阶段 第4阶段 第5阶段状态 1状态 2状态3状态 4状态 5状态 6)}(),(),(),(m in{)(252141511414E f E D d E f E D d D f ++=.7}35,43min{=++=.11F E D →→},,{3214D D D S =a=[0,4,5,inf,inf,inf,inf,inf,inf,inf,inf,inf,inf 4,0,inf,2,3,6,inf,inf,inf,inf,inf,inf,inf 5,inf,0,inf,8,7,7,inf,inf,inf,inf,inf,inf inf,2,inf,0,inf,inf,inf,5,8,inf,inf,inf,inf inf,3,8,inf,0,inf,inf,4,5,inf,inf,inf,inf inf,6,7,inf,inf,0,inf,inf,3,4,inf,inf,inf inf,inf,7,inf,inf,inf,0,inf,8,4,inf,inf,inf inf,inf,5,4,inf,inf,inf,0,inf,inf,3,5,inf inf,inf,inf,8,5,3,8,inf,0,inf,6,2,inf inf,inf,inf,inf,inf,4,4,inf,inf,0,1,3,inf inf,inf,inf,inf,inf,inf,inf,3,6,1,0,inf,4 inf,inf,inf,inf,inf,inf,inf,5,2,3,inf,0,3 inf,inf,inf,inf,inf,inf,inf,inf,inf,inf,4,3,0]; s8=min(a(8,11)+a(11,13),a(8,12)+a(12,13)); s9=min(a(9,11)+a(11,13),a(9,12)+a(12,13)); s10=min(a(10,11)+a(11,13),a(10,12)+a(12,13)); s4=min(a(4,8)+s8,a(4,9)+s9); s5=min(a(5,8)+s8,a(5,9)+s9); s6=min(a(6,9)+s9,a(6,10)+s10); s7=min(a(7,9)+s9,a(7,10)+s10); s2=[a(2,4)+s4,a(2,5)+s5,a(2,6)+s6]; s2=min(s2);s3=[a(3,5)+s5,a(3,6)+s6,a(3,7)+s7]; s3=min(s3);s1=min(a(1,2)+s2,a(1,3)+s3)运行结果为:s8 = 7 s9 = 5 s10 = 5 s4 = 12 s5 = 10 s6 = 8 s7 = 9 s2 =13s3 = 15 s1 = 17结果分析:s 表示每个点到终点的最短距离,那么最短路程为17。
无人驾驶汽车实时路径规划算法分析在智能交通领域中,无人驾驶汽车正逐渐成为一种新的交通方式。
为了保证无人驾驶汽车能够安全、高效地行驶,实时路径规划算法起着重要的作用。
本文将对无人驾驶汽车实时路径规划算法进行分析,并探讨其原理和应用。
实时路径规划算法是指在随着车辆位置、环境和交通状况的实时变化进行路径规划的算法。
无人驾驶汽车需要根据当前位置、终点位置以及路况等信息来确定最佳路径,以实现安全、快速到达目的地的目标。
以下是一些常用的无人驾驶汽车实时路径规划算法。
1. A*算法A*算法是一种启发式搜索算法,通过评估预测的最佳路径来寻找最短路径。
它使用启发式函数来指导搜索过程,以便快速找到目标。
A*算法基于广度优先搜索和最佳优先搜索,使用估计函数来评估每个节点的成本。
它在无人驾驶汽车路径规划中具有较高的效率和准确性。
2. Dijkstra算法Dijkstra算法是一种单源最短路径算法,用于在有向图中找到两个顶点之间的最短路径。
该算法基于图中各边的权重来确定最短路径,通过逐步确定每个顶点到起点的最短距离来实现。
Dijkstra算法在无人驾驶汽车路径规划中有较好的性能,可以找到最短路径。
3. Bellman-Ford算法Bellman-Ford算法是一种用于解决最短路径问题的动态规划算法。
它通过迭代更新每个节点的最短距离来求解最短路径。
Bellman-Ford算法可以处理带有负权边的图,这在实时路径规划中非常有用。
然而,该算法的时间复杂度较高,在大规模图中的应用受到限制。
4. 强化学习算法强化学习算法是一种使用奖励机制来学习行为策略的算法。
在无人驾驶汽车实时路径规划中,强化学习算法可以通过与环境交互来学习最优行为策略。
通过不断试错和调整策略,无人驾驶汽车可以根据实时情况选择最佳路径。
强化学习算法在无人驾驶汽车领域具有广泛的应用前景。
除了上述算法,还有许多其他的无人驾驶汽车实时路径规划算法,如深度学习算法、遗传算法等。
车辆路径问题的求解方法
车辆路径问题是指在给定的地图或路网上,寻找一条最优路径或最短路径,使得车辆从起点到终点能够在最短时间或最小代价内到达目的地。
常见的车辆路径问题包括最短路问题、最小生成树问题、最优化路径问题等。
以下是常见的车辆路径问题的求解方法:
1. Dijkstra算法:Dijkstra算法是求解单源最短路径问题的经典算法,它通过不断更新起点到各个节点的最短距离来求解最短路径。
该算法适用于路网较小的情况。
2. Floyd算法:Floyd算法是一种求解任意两点间最短路径的算法,它通过动态规划的思想,逐步计算出任意两点之间的最短路径。
该算法适用于路网较大的情况。
3. A*算法:A*算法是一种启发式搜索算法,它通过估计每个节点到终点的距离,来选择最优的扩展节点。
该算法适用于需要考虑路况等因素的情况。
4. 蚁群算法:蚁群算法是一种模拟蚂蚁觅食行为的算法,它通过模拟蚂蚁在路径上的行走过程,来寻找最优路径。
该算法适用于需要考虑多个因素的情况。
5. 遗传算法:遗传算法是一种模拟生物进化过程的算法,它通过不断交叉、变异、选择等操作,来寻找最优解。
该算法适用于需要考虑多个因素的情况。
以上是常见的车辆路径问题的求解方法,不同的问题需要选择不同的算法来求解。
gis最佳路径名词解释解释说明1. 引言1.1 概述GIS(地理信息系统)是一种集成空间数据和地理分析技术的工具,它能够帮助我们理解和处理与地理、位置相关的问题。
在现代社会中,各行各业都广泛应用了GIS技术,其中之一就是最佳路径分析。
本文将详细介绍GIS最佳路径的概念、原理以及应用领域。
最佳路径是指在特定的约束条件下,在两个或多个地点之间找到一条最优的路径。
这条路径通常是基于某种评价标准,如距离最短、时间最短或成本最低等。
1.2 文章结构本文共分为5个部分。
首先,在引言部分我们将简单介绍GIS最佳路径的背景和意义。
其次,在第2部分中,我们将详细解释GIS的概念,并介绍最佳路径定义与原理。
然后,在第3部分中,将对GIS最佳路径算法进行分类解析,并讨论约束条件对最佳路径计算的影响。
接下来,在第4部分中,将通过实际案例给出城市交通规划、物流配送以及应急救援等方面在GIS最佳路径应用上的示例。
最后,在结论部分,我们将总结本文的主要内容,并展望GIS最佳路径在未来的发展方向。
1.3 目的本文旨在通过对GIS最佳路径的详细解释和应用案例分析,帮助读者更好地理解与使用该技术。
无论是进行城市规划、交通管理,还是优化物流配送路线等领域,掌握GIS最佳路径技术都能为决策提供科学依据,并带来更高效、更经济的结果。
(注意:此回答为普通文本格式,并不包含实际段落格式。
)2. GIS最佳路径名词解释2.1 GIS概念介绍地理信息系统(Geographic Information System,简称GIS)是一种用于处理、存储、分析和可视化地理空间数据的技术工具。
它结合了地理学、统计学和计算机科学等多个学科,通过利用空间关系和属性关系来展示地理现象和问题。
2.2 最佳路径定义与原理最佳路径是指在给定的网络中,根据特定的约束条件找到两点之间距离最短或时间最少的路线。
在GIS中,最佳路径通常被应用于交通规划、物流配送、应急救援等领域。
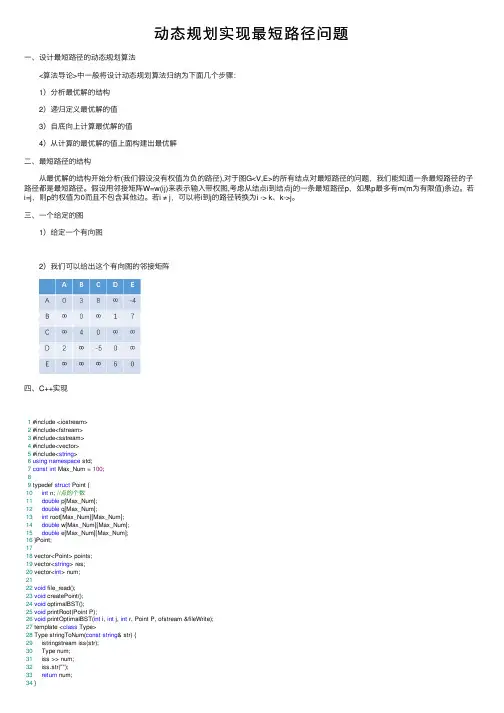
动态规划实现最短路径问题⼀、设计最短路径的动态规划算法 <算法导论>中⼀般将设计动态规划算法归纳为下⾯⼏个步骤: 1)分析最优解的结构 2)递归定义最优解的值 3)⾃底向上计算最优解的值 4)从计算的最优解的值上⾯构建出最优解⼆、最短路径的结构 从最优解的结构开始分析(我们假设没有权值为负的路径),对于图G<V,E>的所有结点对最短路径的问题,我们能知道⼀条最短路径的⼦路径都是最短路径。
假设⽤邻接矩阵W=w(ij)来表⽰输⼊带权图,考虑从结点i到结点j的⼀条最短路径p,如果p最多有m(m为有限值)条边。
若i=j,则p的权值为0⽽且不包含其他边。
若i ≠ j,可以将i到j的路径转换为i -> k、k->j。
三、⼀个给定的图 1)给定⼀个有向图 2)我们可以给出这个有向图的邻接矩阵四、C++实现1 #include <iostream>2 #include<fstream>3 #include<sstream>4 #include<vector>5 #include<string>6using namespace std;7const int Max_Num = 100;89 typedef struct Point {10int n; //点的个数11double p[Max_Num];12double q[Max_Num];13int root[Max_Num][Max_Num];14double w[Max_Num][Max_Num];15double e[Max_Num][Max_Num];16 }Point;1718 vector<Point> points;19 vector<string> res;20 vector<int> num;2122void file_read();23void createPoint();24void optimalBST();25void printRoot(Point P);26void printOptimalBST(int i, int j, int r, Point P, ofstream &fileWrite);27 template <class Type>28 Type stringToNum(const string& str) {29 istringstream iss(str);30 Type num;31 iss >> num;32 iss.str("");33return num;34 }3536void file_read() {37string str2, str1 = "", result;38 ifstream fileRead("in.dat");39if (fileRead.is_open()) {40while (getline(fileRead, str2, '\n')) {41if (str2.find("") != -1) {42 str1.append(str2 + "");43 }44else {45 num.push_back(stringToNum<int>(str2));46if (str1 != "") {47 res.push_back(str1);48 }49 str1 = "";50 }51 }52 res.push_back(str1);53 fileRead.close();54 }55 }5657void createPoint() {58string temp;59 Point P;60for (int i = 0; i < res.size(); i++) {61 vector<string> temp_str; //存放按照空格分开后的数字62int n = num[i];63 stringstream input(res[i]);64while (input >> temp) {65 temp_str.push_back(temp);66 }67 P.n = n;68for(int k = 0; k<=n; k++) P.p[k] = stringToNum<double>(temp_str[k]);69for(int k = n + 1; k<temp_str.size(); k++) P.q[k-(n+1)] = stringToNum<double>(temp_str[k]);70 points.push_back(P);71 }72 }7374//根据书上的伪代码:接收概率列表p1....pn和q0.....qn以及规模n作为输⼊计算出e和root75void optimalBST(){76 Point P;77for(int i = 0; i<res.size(); i++) {78 vector<string> temp_str; //存放按照空格分开后的数字79int n = num[i];80string temp;81 stringstream input(res[i]);82while (input >> temp) {83 temp_str.push_back(temp);84 }85 P.n = n;8687for(int k = 0; k<=n; k++) P.p[k] = stringToNum<double>(temp_str[k]);88for(int k = n + 1; k<temp_str.size(); k++) P.q[k-(n+1)] = stringToNum<double>(temp_str[k]); 8990//初始化只包括虚拟键的⼦树91for (int i = 1;i <= P.n + 1;++i){92 P.w[i][i-1] = P.q[i-1];93 P.e[i][i-1] = P.q[i-1];94 }95//由下到上,由左到右逐步计算96for (int len = 1;len <= P.n;++len){97for (int i = 1;i <= P.n - len + 1;++i){98int j = i + len - 1;99 P.e[i][j] = Max_Num;100 P.w[i][j] = P.w[i][j-1] + P.p[j] + P.q[j];101//求取最⼩代价的⼦树的根102for (int r = i;r <= j;++r)103 {104double temp = P.e[i][r-1] + P.e[r+1][j] + P.w[i][j];105if (temp < P.e[i][j])106 {107 P.e[i][j] = temp;108 P.root[i][j] = r;109 }110 }111 }112 }113 points.push_back(P);114 }115 }116117void printOptimalBST(int i, int j, int r, Point P, ofstream &fileWrite){118int root_node = P.root[i][j];//⼦树根节点119if (root_node == P.root[1][P.n]){120//输出整棵树的根121 fileWrite << "k" << root_node << "是根" << endl;122 printOptimalBST(i, root_node - 1, root_node, P, fileWrite);123 printOptimalBST(root_node +1 , j, root_node, P, fileWrite);124return;125 }126127if (j < i - 1){128return;129 }else if (j == i - 1){//遇到虚拟键130if (j < r)131 fileWrite << "d" << j << "是" << "k" << r << "的左孩⼦" << endl;132else133 fileWrite << "d" << j << "是" << "k" << r << "的右孩⼦" << endl;134return;135 }136else{//遇到内部结点137if (root_node < r)138 fileWrite << "k" << root_node << "是" << "k" << r << "的左孩⼦" << endl; 139else140 fileWrite << "k" << root_node << "是" << "k" << r << "的右孩⼦" << endl; 141 }142 printOptimalBST(i, root_node - 1, root_node, P, fileWrite);143 printOptimalBST(root_node + 1, j, root_node, P, fileWrite);144 }145146//输出最优⼆叉查找树所有⼦树的根147void printRoot(Point P){148 cout << "各⼦树的根:" << endl;149for (int i = 1;i <= P.n;++i){150for (int j = 1;j <= P.n;++j){151 cout << P.root[i][j] << "";152 }153 cout << endl;154 }155 cout << endl;156 }157158int main(){159 file_read();160 optimalBST();161 ofstream fileWrite("out.dat");162 Point P ;163for(int i = 0; i<points.size(); i++) {164 P = points[i];165 printRoot(P);166 printOptimalBST(1,P.n,-1, P, fileWrite);167 }168 fileWrite.clear();169return0;170 } 上述代码是将给定的邻接矩阵从⽂件中读取 然后根据输⼊的邻接矩阵求出最短路径。
动态规划算法在路径规划中的应用路径规划在日常生活中随处可见,比如搜索最短路线、规划旅游路线、寻找交通路线等等。
其中,动态规划算法被广泛应用于路径规划领域,可解决诸如最短路径、最小花费路径等问题。
这篇文章将介绍动态规划算法在路径规划中的应用。
一、动态规划算法的基本原理动态规划算法是一种求解多阶段决策问题的优化方法。
它将问题分成多个子问题,并分别求解这些子问题的最优解。
最后通过不断合并子问题的最优解得到原问题的最优解。
其基本思想可以用以下三个步骤来概括:1.确定状态:将原问题分解成若干个子问题,每个子问题对应一个状态。
2.确定状态转移方程:确定每个状态之间的转移关系。
3.确定边界条件:确定初始状态和结束状态。
动态规划算法通常包括两种方法:自顶向下的记忆化搜索和自底向上的迭代法。
其中,自顶向下的记忆化搜索依赖于递归调用子问题的解,而自底向上的迭代法则通过维护状态表来解决问题。
二、动态规划算法在路径规划中的应用路径规划是动态规划算法的一个重要应用场景。
动态规划算法可以用来求解最短路径、最小花费路径、最大价值路径等问题。
这里以求解最短路径为例,介绍动态规划算法在路径规划中的应用。
1.问题定义假设我们需要从城市A走到城市B,中途经过若干个城市。
每个城市之间的距离已知,现在需要求出从城市A到城市B的最短路径。
这个问题可以用动态规划算法来求解。
2.状态定义在这个问题中,我们可以用一个二元组(u, v)表示从城市u到城市v的一条路径。
因此,在求解最短路径问题时,我们需要进行状态定义。
通常情况下,状态定义成一个包含一个或多个变量的元组,这些变量描述了在路径中的某个位置、某种状态和其他有关的信息。
在这个问题中,状态定义为S(i,j),它表示从城市A到城市j的一条路径,该路径经过了城市集合{1, 2, …, i}。
3.状态转移方程状态转移方程描述了相邻状态之间的关系,即从一个状态到另一个状态的计算方法。
在求解最短路径问题时,状态转移方程可以定义为:d(i, j) = min{d(i-1, j), d(i, k) + w(k, j)}其中,d(i,j)表示从城市A到城市j经过城市集合{1, 2, …, i}的最短路径长度。
动态规划算法
动态规划算法(Dynamic Programming)是一种解决多阶段最优化决策问题的算法。
它将问题分为若干个阶段,并按照顺序从第一阶段开始逐步求解,通过每一阶段的最优解得到下一阶段的最优解,直到求解出整个问题的最优解。
动态规划算法的核心思想是将问题划分为子问题,并保存已经解决过的子问题的解,以便在求解其他子问题时不需要重新计算,而是直接使用已有的计算结果。
即动态规划算法采用自底向上的递推方式进行求解,通过计算并保存子问题的最优解,最终得到整个问题的最优解。
动态规划算法的主要步骤如下:
1. 划分子问题:将原问题划分为若干个子问题,并找到问题之间的递推关系。
2. 初始化:根据问题的特点和递推关系,初始化子问题的初始解。
3. 递推求解:按照子问题的递推关系,从初始解逐步求解子问题的最优解,直到求解出整个问题的最优解。
4. 得到最优解:根据子问题的最优解,逐步推导出整个问题的最优解。
5. 保存中间结果:为了避免重复计算,动态规划算法通常会使
用一个数组或表格来保存已经求解过的子问题的解。
动态规划算法常用于解决最优化问题,例如背包问题、最长公共子序列问题、最短路径问题等。
它能够通过将问题划分为若干个子问题,并通过保存已经解决过的子问题的解,从而大大减少计算量,提高算法的效率。
总之,动态规划算法是一种解决多阶段最优化决策问题的算法,它通过将问题划分为子问题,并保存已经解决过的子问题的解,以便在求解其他子问题时不需要重新计算,从而得到整个问题的最优解。
动态规划算法能够提高算法的效率,是解决最优化问题的重要方法。
最短路径问题的动态规划算法动态规划是一种解决复杂问题的有效算法。
最短路径问题是指在给定的图中找到从起点到终点路径中距离最短的路径。
本文将介绍动态规划算法在解决最短路径问题中的应用。
1. 最短路径问题简介最短路径问题是图论中的经典问题之一,旨在找到从图中一点到另一点的最短路径。
通常使用距离或权重来衡量路径的长度。
最短路径问题有多种算法可以解决,其中动态规划算法是一种常用且高效的方法。
2. 动态规划算法原理动态规划算法的核心思想是将原问题分解为更小的子问题,并存储已解决子问题的结果,以供后续使用。
通过逐步解决子问题,最终得到原问题的解。
在最短路径问题中,动态规划算法将路径分解为多个子路径,并计算每个子路径的最短距离。
3. 动态规划算法步骤(1)定义状态:将问题转化为一个状态集合,每个状态表示一个子问题。
(2)确定状态转移方程:通过递推或计算得到子问题之间的关系,得到状态转移方程。
(3)确定初始状态:设置与最小子问题相关的初始状态。
(4)递推求解:根据状态转移方程,逐步计算中间状态,直到得到最终解。
(5)回溯路径:根据存储的中间状态,找到最短路径。
4. 动态规划算法示例以经典的Dijkstra算法为例,演示动态规划算法在解决最短路径问题中的应用。
假设有带权重的有向图G,其中节点数为n,边数为m。
算法步骤如下:(1)定义状态:对于图G中的每个节点v,定义状态d[v]代表从起点到节点v的最短距离。
(2)确定状态转移方程:d[v] = min(d[u]+w[u,v]),其中u为节点v 的直接前驱节点,w[u,v]为边(u,v)的权重。
(3)确定初始状态:设置起点s的最短距离d[s]为0,其他节点的最短距离d[v]为无穷大。
(4)递推求解:根据状态转移方程逐步计算中间状态d[v],更新最短距离。
(5)回溯路径:根据存储的前驱节点,从终点t开始回溯,得到最短路径。
5. 动态规划算法的优缺点优点:(1)求解速度快,适用于大规模问题。
最短距离求解题技巧最短距离求解问题是在计算机科学和运筹学中非常重要的一个问题。
它在许多领域中都有广泛的应用,包括路径规划、网络优化、数据挖掘等。
在本文中,我将介绍一些求解最短距离问题的常用技巧。
1. Dijkstra算法Dijkstra算法是求解单源最短路径问题的一种经典算法。
它通过逐步确定从源点到其他节点的最短路径,并使用一个优先级队列来选择下一个最近的节点。
Dijkstra算法的时间复杂度为O((V+E)logV),其中V是节点数,E是边数。
2. Bellman-Ford算法Bellman-Ford算法是求解单源最短路径问题的另一种经典算法。
与Dijkstra算法不同的是,Bellman-Ford算法可以处理图中存在负权边的情况。
Bellman-Ford算法通过对所有边进行V-1轮的松弛操作来逐步确定最短路径。
Bellman-Ford算法的时间复杂度为O(VE),其中V是节点数,E是边数。
3. Floyd-Warshall算法Floyd-Warshall算法是求解全源最短路径问题的一种经典算法。
它通过动态规划的方式计算从任意两个节点之间的最短路径。
Floyd-Warshall算法的时间复杂度为O(V^3),其中V是节点数。
Floyd-Warshall算法的优势是可以处理有向图或无向图中存在负权边的情况。
4. A*算法A*算法是一种启发式搜索算法,用于求解从起点到终点的最短路径。
它综合使用节点距离和启发式函数来评估节点的优先级,以选择下一个节点进行扩展。
A*算法通常在路径规划和游戏AI中使用。
A*算法的时间复杂度取决于启发函数的复杂度。
5. 最小生成树算法最小生成树算法是一种用于求解无向图的最短路径问题的算法。
它通过选择边来构建一个连通的生成树,使得树的权重和最小。
常见的最小生成树算法包括Prim算法和Kruskal算法。
Prim算法的时间复杂度为O(ElogV),Kruskal算法的时间复杂度为O(ElogE)。
动态规划算法有啥用途动态规划算法是一种常用的优化算法,可以在时间和空间上实现高效的计算。
它适用于一系列问题,包括最优化问题、决策问题和计数问题等。
动态规划算法通常用于问题具备「无后效性」(无后效性是指问题的当前状态不会受到未来状态的影响)和「最优子结构」(问题的最优解可以由子问题的最优解推导得到)的情况下。
基本思想是将原问题划分为若干子问题,逐个求解子问题,再根据子问题的最优解推导出原问题的解。
下面将介绍几个典型的应用场景:1. 最短路径问题:最短路径问题是图论中的经典问题,动态规划算法可以高效地解决。
通过构建状态转移方程,可以递推求解从起点到终点的最短路径。
2. 最长公共子序列问题:最长公共子序列问题在字符串处理中非常常见,例如求两个字符串的最长公共子序列长度。
动态规划算法可以通过构建状态转移方程来高效地求解。
3. 背包问题:背包问题是一类经典的组合优化问题,常见的有0-1背包问题、完全背包问题和多重背包问题。
动态规划算法可以用来求解背包问题的最优解。
4. 最大子数组和问题:最大子数组和问题是在一个数列中找到一个连续子数组,使得子数组元素的和最大。
动态规划算法可以用来高效地求解最大子数组和。
5. 最长递增子序列问题:最长递增子序列问题即求解一个序列中最长的子序列,满足子序列中的元素从左到右递增。
动态规划算法可以高效地求解最长递增子序列的长度。
6. 矩阵链乘法问题:矩阵链乘法问题是矩阵计算中常见的优化问题,即给定一系列矩阵,求解它们相乘的最少次数。
动态规划算法可以用来高效地解决该问题。
7. 0-1背包问题:0-1背包问题是指在给定的一组物品中,每个物品可以选择放入背包或不放入背包,目标是使得背包中物品的总价值最大,且背包的容量不能超过一个给定的值。
动态规划算法可以用来求解该问题的最优解。
8. 最大子矩阵和问题:最大子矩阵和问题是在一个二维矩阵中寻找一个子矩阵,使得子矩阵元素的和最大。
动态规划算法可以用来高效地求解最大子矩阵和。
动态规划算法实现多段图的最短路径问题算法设计与分析实验报告算法设计与分析实验报告实验名称 动态规划算法实现多段图的最短路径问题 评分 实验日期 年 月 日 指导教师 姓名 专业班级 学号一.实验要求1. 理解最优子结构的问题。
有一类问题的活动过程可以分成若干个阶段,而且在任一阶段后的行为依赖于该阶段的状态,与该阶段之前的过程如何达到这种状态的方式无关。
这类问题的解决是多阶段的决策过程。
在50年代,贝尔曼(Richard Bellman )等人提出了解决这类问题的“最优化原理”,从而创建了最优化问题的一种新的算法设计方法-动态规划。
对于一个多阶段过程问题,是否可以分段实现最优决策,依赖于该问题是否有最优子结构性质,能否采用动态规划的方法,还要看该问题的子问题是否具有重叠性质。
最优子结构性质:原问题的最优解包含了其子问题的最优解。
子问题重叠性质:每次产生的子问题并不总是新问题,有些子问题被反复计算多次。
问题的最优子结构性质和子问题重叠性质是采用动态规划算法的两个基本要素。
2.理解分段决策Bellman 方程。
每一点最优都是上一点最优加上这段长度。
即当前最优只与上一步有关。
U s 初始值,u j 第j 段的最优值。
⎪⎩⎪⎨⎧+==≠}.{min ,0ijiji js w u u u3.一般方法1)找出最优解的性质,并刻画其结构特征;2)递归地定义最优值(写出动态规划方程);3)以自底向上的方式计算出最优值;4)根据计算最优值时得到的信息,构造一个最优解。
步骤1-3是动态规划算法的基本步骤。
在只需要求出最优值的情形,步骤4可以省略,步骤3中记录的信息也较少;若需要求出问题的一个最优解,则必须执行步骤4,步骤3中记录的信息必须足够多以便构造最优解。
二.实验内容1.编程实现多段图的最短路径问题的动态规划算法。
2.图的数据结构采用邻接表。
3.要求用文件装入5个多段图数据,编写从文件到邻接表的函数。
4.验证算法的时间复杂性。
最短路径问题的动态规划算法最短路径问题的动态规划算法是一种常用的解决路径优化的方法。
动态规划算法的核心思想是将原问题拆分成若干个子问题,通过递推关系找到最优解。
在最短路径问题中,我们通常希望找到从起点到终点的最短路径。
首先,我们需要定义一个二维数组dp,其中dp[i][j]表示从起点到达坐标(i, j)的最短路径长度。
初始化dp数组,将起点的值设为0,其他位置的值设为无穷大(即表示不可达)。
接下来,我们需要确定动态规划的状态转移方程。
对于任意一个坐标(i, j),它可以从上方的坐标(i-1, j)、左方的坐标(i, j-1)、右方的坐标(i, j+1)、下方的坐标(i+1, j)四个位置中的某一个到达。
因此,可以得到状态转移方程如下:
dp[i][j] = min(dp[i-1][j], dp[i][j-1], dp[i][j+1], dp[i+1][j]) + 1
其中,min表示取其中的最小值。
通过以上状态转移方程,我们可以逐步更新dp数组,直到最终得到终点的最短路径长度。
需要注意的是,动态规划算法的时间复杂度通常是O(n^2),其中n 表示问题规模。
因此,在处理大规模最短路径问题时,需要考虑算法的效率,可能需要进行剪枝等优化操作。
总的来说,最短路径问题的动态规划算法在路径优化领域有着重要的应用价值,通过合理定义状态转移方程和优化算法效率,可以找到从起点到终点的最短路径长度,为路径规划提供有效的解决方案。
floyd算法求最短路径问题的步骤Floyd算法是一种用于求解最短路径问题的动态规划算法。
它能够计算出任意两点之间的最短路径长度,并且可以同时得到最短路径的具体路径。
下面是Floyd算法求解最短路径问题的步骤:
1. 创建一个二维数组dist,用于存储任意两点之间的最短路径长度。
初始化时,将所有的元素设为无穷大(表示不可达),但对角线上的元素设为0。
2. 创建一个二维数组path,用于存储任意两点之间最短路径的中间节点。
初始化时,将所有的元素设为-1。
3. 根据给定的图或者网络,将直接相连的两个节点之间的距离填入`dist`数组中。
如果两个节点之间不存在边,则将距离设为无穷大。
4. 使用三重循环进行计算。
外层循环遍历所有可能的中间节点,中间层循环遍历所有可能的起始节点,内层循环遍历所有可能的目标节点。
如果通过中间节点k可以使得从起始节点i到目标节点j的路径更短,即dist[i][k] + dist[k][j] < dist[i][j],则更新dist[i][j]为新的最短路径长度,并更新path[i][j]为中间节点k。
5. 循环结束后,dist数组中存储的就是任意两点之间的最短路径长度,path数组中存储的是最短路径的中间节点。
6. 如果需要获取具体的最短路径,可以通过回溯path数组来获取。
以起始节点i和目标节点j为例,可以通过不断查找path[i][j],直到找到-1为止,得到最短路径
的节点序列。
以上就是Floyd算法求解最短路径问题的步骤。
该算法的时间复杂度为O(n^3),其中n为节点的数量。
最短路径问题的并行算法归纳总结介绍最短路径问题是图论中的一个经典问题,旨在找到两个节点之间的最短路径。
由于计算最短路径在大型图上可能非常耗时,因此并行算法成为解决此问题的一种有效策略。
本文将对最短路径问题的并行算法进行归纳总结。
并行算法1: Floyd-Warshall算法Floyd-Warshall算法是一种经典的动态规划算法,用于求解任意两个节点之间的最短路径。
该算法的并行化版本可以通过将图划分为多个子图,并在每个子图上独立执行算法来实现。
通过并行化处理,可以显著加快计算速度。
并行算法2: Dijkstra算法Dijkstra算法也是一种常用的最短路径算法,适用于单源最短路径问题。
并行化Dijkstra算法的一种常见方法是使用优先级队列来同时处理多个节点。
通过使用多线程或分布式计算,可以同时计算多个节点的最短路径,提高算法的效率。
并行算法3: Bellman-Ford算法Bellman-Ford算法是一种解决带有负权边的最短路径问题的算法。
并行化Bellman-Ford算法可以通过以不同的顺序计算各个节点来实现。
通过并行计算多个节点,可以加快算法的执行速度。
结论最短路径问题的并行算法提供了一种加速计算的有效策略。
Floyd-Warshall算法、Dijkstra算法和Bellman-Ford算法是常见的并行算法,分别适用于不同类型的最短路径问题。
在实际应用中,选择合适的并行算法可以根据具体问题的特点和计算资源的情况进行决策。
最后要重申的是,本文对最短路径问题的并行算法进行了归纳总结,但请注意,引用的内容需要经过确认,避免不可信信息的引用。
解最短路径问题的两种方法及其应用
最短路径问题是指在一张带权图中找到两个节点之间最短的路径。
最短路径问题是许多计算机科学和应用领域中的一个基本问题。
以下是解决这个问题的两种方法:
1. Dijkstra算法:Dijkstra算法是解决最短路径问题的一种
基本算法,它是基于贪心思想的。
该算法首先确定起始点到其他节
点的距离(记为d),然后不断扩大已确定最短距离的节点集,直
到覆盖所有节点。
Dijkstra算法适用于单源最短路径,即从一个节
点到所有其他节点的最短路径。
2. Floyd算法:Floyd算法也是一种经典的解决最短路径问题
的算法,它是一个动态规划算法。
该算法利用动态规划的思想,通
过比较任意两个节点之间经过第三点(中转点)的路径长度,更新
路径长度。
Floyd算法适用于多源最短路径,即从任意两个节点之
间的最短路径。
这两种算法可广泛应用于各种计算机科学和应用领域,如网页
排名算法、图像处理、计算机网络等。
在实际应用中,我们需要根
据实际问题的特点,选择最适合的算法。
动态规划是一种用于解决最优化问题的算法。
它通常用于找到最小或最大值。
这里列举了12 个常见的动态规划算法,并给出了每个算法的举例:
1 最长公共子序列(LCS)算法:用于比较两个序列,找出它们之
间的最长公共子序列。
2 最小编辑距离算法:用于比较两个字符串,找出将一个字符串变
为另一个字符串所需的最少编辑操作次数。
3 背包问题算法:用于在限制给定的总体积的情况下选择最优的物
品组合。
4 最短路径算法:用于求解有向图或路径的最短路径。
5 最小生成树算法:用于求解图的最小生成树。
6 线性规划算法:用于求解线性规划问题。
7 矩阵链乘法算法:用于计算矩阵链乘法的最优计算次序。
8 单源最短路径算法:用于求解有向图的单源最短路径问题。
9 拓扑排序算法:用于对有向无环图(DAG)进行拓扑排序。
10图形相似性算法:用两个图形进行对齐,并通过比较它们之间的差异来评估它们的相似程度。
11 11 区间动态规划算法:用于解决区间动态规划问题,例如
最小编辑代价问题。
12 分数背包问题算法:用于在限制给定的总价值的情况下选择
最优的物品组合。
13这些算法的具体细节及实现方式可以通过搜索或者学习相
关的资料来了解。