基于PMSM伺服系统的建模与仿真设计
- 格式:pdf
- 大小:489.43 KB
- 文档页数:9
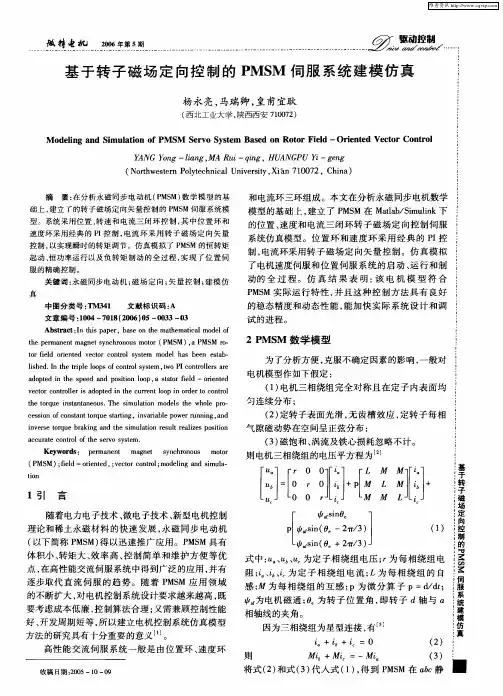
基于模糊PI 控制的P M S M 位置伺服系统仿真王 翔,马瑞卿,吉攀攀(西北工业大学自动化学院,西安 710072)摘 要:本文在分析了永磁同步电机(P MS M )数学模型的基础上,在M atlab 的S m i uli n k 环境下构建了隐极式永磁同步电机位置伺服系统的仿真模型。
控制系统采用经典的三闭环结构,其中电流环采用i d =0的矢量控制策略,速度环采用PI 控制,位置环采用模糊PI 自适应控制,自适应控制通过M atl a b 软件编程。
文中给出了系统各模块仿真模型的建立方法,并针对工程系统实际参数,进行了负载突加突卸时位置、速度和转矩瞬态过程仿真与分析。
结果表明,该系统抗干扰性好,能快速准确地跟踪位置及转速给定。
关键词:永磁同步电机;矢量控制;模糊控制;建模;仿真中图分类号:TM 351;TM 341 文献标志码:A 文章编号:1001-6848(2010)03-0052-04Si m ulation of P M S M Position Servo Syste m Based on Fuzzy PI ControlWANG X iang ,MA Ru-i q i n g ,JI Pan -pan(Schoo l o fAuto m ati o n ,N orthw estern PolytechnicalUn i v ersity ,X i an 710072,Ch i n a)Abst ract :In th is paper ,t h e m athe m atic m odel o f t h e per m anent m agnet synchronous m otor (P MSM )w as ana l y zed firs,t and then t h e si m u lation m ode l of the non -salien-t po le P M S M w as estab lished i n t h e si m uli n k o f theM atlab based on the m athe m atic m odel o f t h e P M S M.The con tro l syste m adoped the c las -sica l three -close -l o op str ucture .I n this con tro l syste m,the i d =0contro l strategy i n current loop and PI contro lw ere used i n speed loop ,and also the fuzzy PI contro l i n positi o n l o op w h i c h w as realized by pro -g ra mm i n g in theM a tlab .G i v en the w ay of estab lish i n g the si m ulink m odel o f every m odu le in theM atlab g i v en in t h is paper ,and the transient processes of positi o n ,speed and torque w ere si m ulated and ana -l y zed for t h e actua l para m eters o f syste m pro ject at the ti m e o f sudden l o ad -add /unload .The si m u lation resu lts ,show the syste m is of good ant-i i n terference and able to track t h e g iven positi o n and speed quick -l y and accurate l y .K ey W ords :Per m anen tm agnet synchronous m oto r (P M S M );V ector contro;l Fuzzy contro;l M ode-l i n g ;Si m u l a ti o n收稿日期:2008-12-290 引 言永磁同步电机(Per m anent M agnet Synchronous M otor ,P M S M )因具有高效率、高控制精度、高转矩密度、宽广的调速范围以及良好的转矩平稳性等一系列优点,在交流伺服控制系统中占有重要的地位[1],近年来随着稀土永磁材料、电力电子技术、微机技术及矢量控制技术的发展,永磁同步电机在国防、工业、民用的各个领域得到了越来越广泛的应用,如火炮瞄准、数控机床、电动汽车、电梯等[2]。
![PMSM调速系统SVPWM控制的建模仿真[1]](https://uimg.taocdn.com/279561c689eb172ded63b7c4.webp)

基于神经网络预测控制的PMSM伺服系统的仿真研究王群京,殷伟,姜卫东,王安邦(合肥工业大学电气工程与自动化学院,安徽合肥230009) 摘要:在PMSM 伺服系统中,电机大多采用的是矢量控制,参数的变化、负载扰动等因素对系统的稳定性、可控性影响较大。
现有的控制策略大多是滞后的,无法根据未来动态行为产生理想电机电压输入。
提出了一种基于神经网络的PWM 预测控制方法。
采用离线训练和在线修正的方法,获得PMSM 神经网络模型,并在控制过程中修正模型。
最优控制器根据该模型的输入、输出响应产生合适的电压波形。
在Matlab/Sim 2ulink 环境下完成仿真,结果表明,较之PI 控制器,神经网络预测控制具有更好的动态性能和鲁棒性。
关键词:神经网络;预测控制;永磁同步电机;伺服系统中图分类号:TP273 文献标识码:ASimulation of Predictive Control B ased ANN for PMSM Servo SystemWAN G Qun 2jing ,YIN Wei ,J IAN G Wei 2dong ,WAN G An 2bang(School of Elect rical Engineering &A utomation ,Hef ei Universit y of Technolog y ,Hef ei 230009,A nhui ,China )Abstract :In servo system driven by permanent magnet synchronous motor (PMSM ),the control strategy of motor is vector control mostly.Parameter vibration ,disturb of load torque have remarkable influence on dy 2namic character of motor.Because of lagging of control strategy ,controller can ′t produce ideal output by using characteristic of motor.Predictive control strategy based artificial neural networks ,was proposed for PMSM servo system.The architecture and parameter are acquired by learning offline and modification online.It can be used to predict characteristic of PMSM.Optimal controller can produce more ideal output waveform by using input &output of neural networks of PMSM.The control method is verified by simulation based matlab &Simulink.The results of simulation indicate that predictive based ANN has better characteristic and robust ,compared with traditional control strategy.K ey w ords :neural networks ;predictive control ;permanent magnet synchronous motor (PMSM );servo system 作者简介:王群京(1960-),男,博士,教授,Email :wqunjing @ 对于由PMSM 构成的伺服系统,国内外的大量学者做了卓有成效的研究工作。
永磁同步伺服系统设计与仿真序言永磁同步伺服系统是当代高性能伺服系统的主要发展方向,其特点是位置分辨率高、定位精度高、调速范围宽,低速稳定运行,无爬行现象,力矩波动小,响应速度快,峰值转矩高,过载能力强,能承受频繁起停、制动和正反转,无电刷,可靠性高,可工作于恶劣的环境。
因此,永磁伺服电机在下述领域得到了广泛的应用:高精度位置伺服控制,包括点位控制和连续轨迹控制;需要频繁调速,并要求低速且稳速运行的场合;需要张力调节和恒张力控制的场合。
本次设计以交流永磁同步伺服系统为研究对象,得到交流永磁伺服系统应用的状况,运用经典控制理论和现代控制理论,将机电专业知识综合运用,对系统进行建模,设计并调试基于单片机的软件程序。
本说明书共分三章,第一章介绍伺服系统的概论从而引出对永磁交流伺服系统的简单概述,并且通过比较AC和DC伺服系统以确定本设计说明书采用的是永磁AC交流伺服系统;第二章主要介绍三相PMSM交流服系统设计,首先比较BDCM和PMS M各自的特点确定采用PMSM系统,接着对系统进行数学模型的建立,并且对PMSM伺服系统进行矢量控制分析;第三章是利用单片机,设计基于单片机的仿真,并且列举调试过程中的问题以及解决对策。
第1章交流永磁同步伺服系统简介1.1伺服技术1.1.1 概述伺服技术是指执行系统中的控制技术。
伺服是在控制指令的指挥下控制驱动元件,使机械系统的运动按指令要求进行。
伺服系统主要用于机械设备位置和速度额动态控制,在数控机床、工业机器人、坐标测量机以及自行导引车等自动化制造,装配及测量设备中,已经获得了广泛的应用。
伺服系统的定义包括:(1)伺服系统—是使物体的位置、方位、状态等输出被控量能够跟随输入目标值(或给定值)的任意变化的自动控制系统;(2)在自动控制系统中,使输出量能够以一定的准确度跟随输入量的变化而变化的系统称为随动系统,亦称伺服系统。
采用伺服系统主要任务是:(1)以小功率指令信号去控制大功率负载;(2)在没有机械连接的情况下,由输入轴控制位于远处的输出轴,实现远距同步传动;(3)使输出机械位移精确地跟踪电信号。
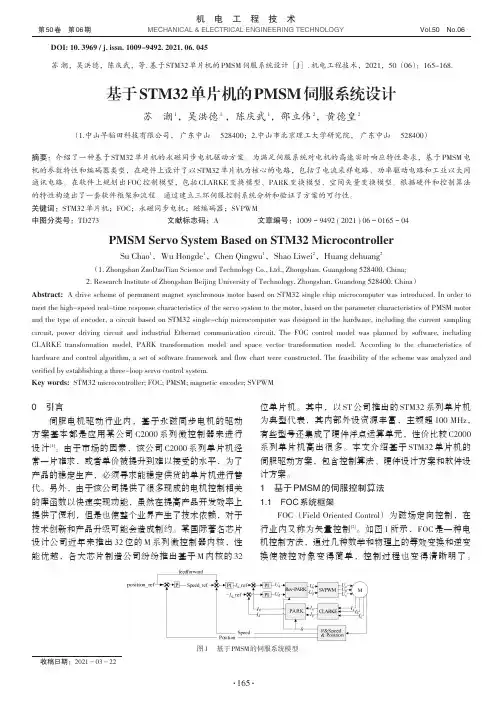
基于PMSM伺服系统的建模与仿真设计蒋明军;张学松;盖绍凤;刘斌;苗秋实【期刊名称】《测试技术学报》【年(卷),期】2011(025)001【摘要】在分析交流永磁同步电机数学模型的基础上,利用MATLAB/SIMULINK 设计出一种基于SVPWM变频调速系统的新型仿真模型,根据空间矢量算法的软件设计流程实现控制系统仿真.文中详细介绍了交流同步电机仿真模型和各功能模块模型的设计方法以及在系统仿真过程中的算法设置和连续系统的离散化设计.由仿真结果可见,系统在高、低速情况下都能平稳运行,控制系统具有良好的动、静态控制特性.运用控制系统模型仿真为设计交流同步电机控制系统提供了有效的手段和工具.也为实际电机控制系统的设计和调试提供了新的思路.【总页数】8页(P59-66)【作者】蒋明军;张学松;盖绍凤;刘斌;苗秋实【作者单位】中国兵器工业201所信息与控制技术部,北京,100072;中国兵器工业201所信息与控制技术部,北京,100072;中国兵器工业201所信息与控制技术部,北京,100072;中国兵器工业201所信息与控制技术部,北京,100072;中国兵器工业201所信息与控制技术部,北京,100072【正文语种】中文【中图分类】TJ303+.8【相关文献】1.基于矩角控制的PMSM伺服系统仿真与设计 [J], 张坤;张琳;董砚;郑易2.基于转子磁场定向控制的PMSM伺服系统建模仿真 [J], 杨永亮;马瑞卿;皇甫宜耿3.基于空间矢量脉宽调制的PMSM伺服系统建模与仿真 [J], 周浩;任智博;叶辛4.基于空间矢量脉宽调制的PMSM伺服系统建模与仿真 [J], 周浩;任智博;叶辛;5.PMSM伺服系统的PID控制器设计及仿真 [J], 仇国庆;罗宣林;王平;吴迪;杨志龙因版权原因,仅展示原文概要,查看原文内容请购买。
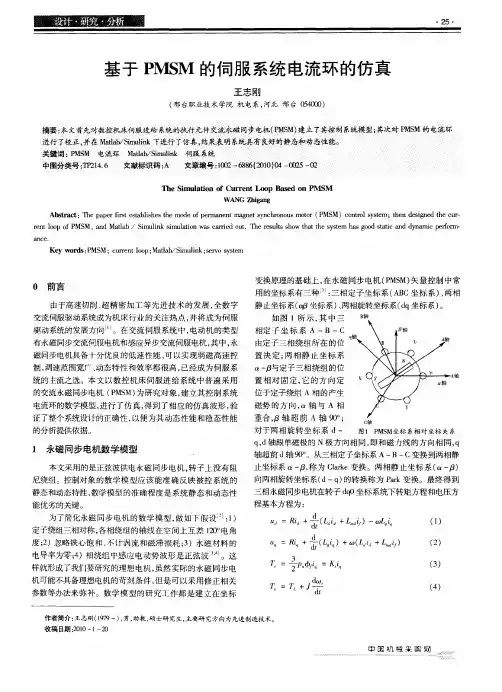
基于PMSM的伺服系统电流环的仿真25?基于PMSM的伺服系统电流环的仿真王志刚(邢台职业技术学院机电系,河北邢台054000)摘要:本文首先对数控机床伺服进给系统的执行元件交流永磁同步电机(PMSM)建立了其控制系统模型;其次对PMsM的电流环进行了校正,并在№tlah/Si砌ink下进行了仿真,结果表明系统具有良好的静态和动态性能.--_-关键~iPMSM:电流环MaⅡab/SiihI(伺服系统0--_0中图分类号:TP2~4.6文献标识码:A文章编号:to02-6886(2010l】o4—0Oj02 TheSimulationofCurrentLoopBasedonPMSMW ANGZhigangAbstract:.paperfirstestablishesthemodeofpermanentmagnetsynchronousmotor(PMSM) controlsystem;thendesignedthecur-rentloopofPMSM.andMaflab/Simulinksimulationwascarriedout.Theresultsshowthatth esystemhasgoodstaticanddynamicperform-ante.Keywords:PMSM;currentloop;Matlab/Simulink;s~rvosystem0前言由于高速切削,超精密加工等先进技术的发展,全数字交流伺服驱动系统成为机床行业的关注热点,并将成为伺服驱动系统的发展方向.在交流伺服系统中,电动机的类型有永磁同步交流伺服电机和感应异步交流伺服电机,其中,永磁同步电机具备十分优良的低速性能,可以实现弱磁高速控制,调速范围宽广,动态特性和效率都很高,已经成为伺服系统的主流之选.本文以数控机床伺服进给系统中普遍采用的交流永磁同步电机(PMSM)为研究对象,建立其控制系统电流环的数学模型,进行了仿真,得到了相应的仿真波形,验证了整个系统设计的正确性,以便为其动态性能和稳态性能的分析提供依据.1永磁同步电机数学模型本文采用的是正弦波供电永磁同步电机,转子上没有阻尼绕组.控制对象的数学模型应该能准确反映被控系统的静态和动态杼胜,数学模型的准确程度是系统静态和动态性能优劣的关键.为了简化永磁同步电机的数学模型,做如下假设J:1)定子绕组三相对称,各相绕组的轴线在空间上互差120.电角度;2)忽略铁心饱和,不计涡流和磁滞损耗;3)永磁材料的电导率为零;4)相绕组中感应电动势波形是正弦波圳.这样就形成了我们要研究的理想电机,虽然实际的永磁同步电机可能不具备理想电机的苛刻条件,但是可以采用修正相关参数等办法来弥补.数学模型的研究工作都是建立在坐标变换原理的基础上,在永磁同步电机(PMSM)矢量控制中常用的坐标系有三种:三相定子坐标系(ABC坐标系),两相静止坐标系(坐标系),两相旋转坐标系(dq坐标系).如图1所示,其中三相定子坐标系A—B—C由定子三相绕组所在的位置决定;两相静止坐标系一与定子三相绕组的位置相对固定,它的方向定位于定子绕组A相的产生磁势的方向,轴与A相重合,轴超前A轴90.;对于两相旋转坐标系d一图1PMsM坐标系相对坐标关系q,d轴跟单磁极的N极方向相同,即和磁力线的方向相同,q轴超前d轴9o..从三相定子坐标系A—B—C变换到两相静止坐标系一卢,称为Clarke变换.两相静止坐标系(仅一卢)向两相旋转坐标系(d—q)的转换称为Park变换.最终得到三相永磁同步电机在转子dqO坐标系统下转矩方程和电压方程基本方程为:Ud=Rid+)一0(1)"=Riclf,L)+∞(,J+L~is)(2)=号p=K,i(3)=+警(4)作者简介:王志刚(1979一),男,助教,硕士研究生,主要研究方向为先进制造技术. 收稿日期:2010—1—20中国机械采购网一m|_}}.一t1i誊26?式中:为绕组等效电阻,L为等效d轴电感,为等效q轴电感,P为电机磁极对数,为转子机械角速度,为转子磁场的等效磁链,为折算到电机轴上的总负载转矩,i为d轴电流,i为q轴电流,J为系统总转动惯量.2矢量电流控制策略对于永磁同步电机矢量控制而言,一定的定子电流对应了一定的转矩,而转矩则直接决定电机的转速,因此矢量控制的本质是对电机定子电流空间矢量幅值和相位进行控制,i =0的矢量控制方式是同步电机的电流主要控制策略之一.i=0控制,通常q轴电流i.为转矩电流分量,对电磁转矩的产生起主要作用,而d轴电流i为励磁分量,对电磁转矩的产生贡献不大,且存在使永磁体去磁的可能.一般情况下, 为了获得最大有效转矩,通常控制i=0,即控制q轴电流分量为零,所以该控制算法简单,使得电磁转矩与定子电流成正比;同时不会使PMSM因退磁而}生能变坏,并且易于实现. 矢量控制的电流环在上述电机模型的基础上主要包括电流给定量平衡滤波器,电流调节器,PWM单元,PMSM电枢回路,以及电流检测反馈滤波器.并且基于现代交流伺服系统的特点可以认为电流环的响应速度比速度环快得多,所以在研究线性范围内的动态过程时,可以认为电势反馈被强电流环断开而忽略..这样可以根据方框图等效变换,得到电流环的简化框图如下:其中为滤波时间常数,rPw为逆变器的惯性时间常数,为逆变器的放大系数,尺为电枢电阻,£图2简化后的电流环控制框图为电枢电感,为检测环节的放大系数.在数控机床的伺服进给系统中电流环为一随动系统,要求在任意睛况下快速跟踪电流指令.从稳态要求上看,希望电流环做到无静差以获得理想的堵转特性;从动态要求来看,电流环的一项重要作用就是保持电动机电枢电流在动态过程中不超过允许值,即在突加控制作用时不希望有超调,或者超调量越小越好.从这一考虑出发,在永磁同步电机伺服系统电流环的控制中只采用PI调节器进行调节,电流环在零到额定转速均能够实时跟踪电流给定,在给定与实际电流问有很小的相位差,并随着转速的增加而增加,实际电流幅值与给定相等.此时电流环PI调节器的传递函数为:71.+】GPf(s)=K(5)』i其中:一积分时间常数;一比例系数.为了抵消大惯性环节对系统的延迟作用令=L/R.则调节后的电流环开环传递函数为:Gs)=而熹(6)按照标准二阶系统的设计有:—(7)K4KKp酬(7_PwM+r)得~只Kp2系统在单位阶跃信号下即R(s)=1/s的稳态误差为:=㈩=lira==.可以看到在PI调节作用下,系统具有良好的稳态性能.3实验及结论系统仿真采用Matlab/Simulink软件,它是一种图形化仿真工具包,不仅能够进行动态系统建模,仿真和综合分析,同时它又可以处理线形与非线性系统,离散,连续和混合系统问题.仿真所用电机参数:额定扭矩为2.39N?lffl,额定功率为750W,机械时间常数为0.34,电气时问常数8.7ms,电感3.4rnH,电阻0.45Q.在Matlab/Simulink下仿真,结果如图3,图4所示.电流环单位阶跃响应曲线/l/:/图4电流环方波信号响应曲线图可以看到系统的超调为4.7%,上升时间为0.0005S,调整时间为0.001S,系统的动态响应达到了较好的性能指标,电流在动态响应过程中没有出现过度超调.本文首先建立交流永磁同步电机的数学模型,然后设计了PI调节器对电流环了进行了校正和仿真.结果表明系统具有良好的动态和稳态性能,为数控机床伺服系统的设计提供了理论和参考价值.参考文献『1]暨绵浩.高精高速伺服驱动技术现状及发展趋势.伺服控制,20O9.6 [2]刘迪吉.航空电机学[M].北京:航空工业出版社,1992『3]朱震莲等着现代调速系统[M]西安:西北工业大学出版社,1994 『4]陈志杰.高性能永磁同步电机矢量控制系统研究[D].南京:东南大学,199310『5]舒志兵.交流伺服运动控制系统.北京:清华大学出版社,2006 [6]牛洪海.永磁同步电动机控制系统及控制方法研究[D].浙江大学硕士学位论文,2006f71赵广元.MATLAB与控制系统仿真实践,北京:北京航空航天大学出版社.20092l8642ll0o。
基于SVPWM的PMSM矢量控制系统的建模与仿真王桂荣;李太峰【摘要】为提高永磁同步电机(PMSM)的运行精度,解决传统SPWM调制技术在电机控制中母线电压利用率低的问题,介绍了电压空间矢量脉宽调制技术( SVPWM)的原理和实现方法,在Matlab/Simulink环境下采用SVPWM技术构建了PMSM 双闭环矢量控制模型.仿真结果验证了该系统设计的有效性,为实际PMSM控制系统的设计提供了有效依据.%In order to improve the operation precision of PMSM and solve the low-usage of bus voltage problem when use the traditional way of SPWM in motor control, this paper introduces the principle of the space vector pulse width modulation(SVPWM) and recommend the manner of its fulfillment. The double-closed loop model is built with vector control based on SVPWM,which is under Matlab/Simulink condition. The simulation results verify the effectiveness of this model and offer useful data for the actual design of PMSM control system.【期刊名称】《大电机技术》【年(卷),期】2012(000)002【总页数】4页(P9-12)【关键词】电压空间矢量脉宽调制;永磁同步电机;矢量控制【作者】王桂荣;李太峰【作者单位】中国计量学院机电工程学院,杭州 310018;中国计量学院机电工程学院,杭州 310018【正文语种】中文【中图分类】TM351引言永磁同步电机(PMSM)因其体积小、效率高、转动惯量小等特点,成为高性能运动控制的理想执行单元。
基于矩角控制的PMSM伺服系统仿真与设计摘要:随着我国经济和工业水平的不断提高与发展,高性能、低功耗的伺服系统备受关注。
以永磁同步电机(PMSM)为母机的伺服系统以其高性能比而受到诸多关注。
以PMSM 为控制对象,对交流步进传动中矩角控制方式应用于伺服系统的情况,进行了动态仿真研究与实际实验平台验证。
仿真与实验结果表明,应用矩角控制方式的PMSM 伺服系统具有良好的动态特性与定位特性,完全满足现代工业伺服系统中的高性能、低功耗的要求。
同时,研究结果也为PMSM 在高性能控制场合下的应用打下了坚实的理论与实验基础。
关键词:永磁同步电机;矩角控制;伺服系统1 引言PMSM 以其高效性、高转矩惯量比、高能量密度而受到诸多关注,因而在数控机床、军工、航天等领域逐渐得到广泛应用。
交流步进传动控制是将位置控制、速度控制和伺服控制等不同的传动控制方式有机结合,使PMSM 的气隙磁动势由连续的旋转磁场变为离散的步进磁场。
对离散的步进磁动势进行控制,可获得良好的速度控制,还可进一步取得精确的位置控制,从而形成高性能的交流传动控制系统。
电力电子技术的应用使系统具有离散控制的基本特征,使传统的运动控制思想得到突破。
它打破了连续与离散、速度与位置、旋转与步进的严格界限,形成了一种统一的交流步进控制理论。
2 步进控制与矩角控制理论2.1 步进控制理论PMSM 的步进控制的中心思想是将电机的定子电流离散为bH 步。
每一步对应一个大小固定和位置步进的定子磁动势,与转子磁动势构成步进角,从而产生步进的复位转矩,进而将转子锁定在一个特定位置上。
若将PMSM 的定子磁势由旋转磁势离散为步进磁势,则定子气隙中所停靠的位置也就是该电机步进运动时能够提供的定位点数,即电机的每步数。
当PMSM 定子绕组输入三相对称正弦电流ia,ib,ic 时,有:式中:Im 为输入三相电流的峰值。
将PMSM 三相磁动。
第3章交流伺服运动控制系统模型及仿真分析PMSM(三相永磁同步电机,permanent magnet Synchronous motor)PMSM位置伺服系统具有位置环、速度环和电流环三闭环结构,电流环和速度环作为系统的内环,位置环为系统外环。
本章介绍交流伺服运动控制的体系结构及组成。
基于PMSM及其驱动器为核心的伺服运动控制系统,建立其数学模型并进行仿真分析。
从分析影响电流环性能的因素着手,提出了PMSM 位置伺服系统电流环综合设计方案。
速度环的设计分别采用PI控制和变结构控制,位置环的设计采用变结构控制。
滑模变结构控制可以提高系统的响应速度、实现定位无超调、改善对负载扰动的鲁棒性和对参数变化的鲁棒性。
仿真模块基于MATLAB/Simulink和Powerlib模块库搭建起来的。
3.1 永磁同步电动机交流伺服运动控制系统交流伺服电动机---工厂自动化(FA)中广泛应用。
永磁同步电动机交流伺服运动控制系统的组成图3-1 交流伺服运动控制系统的集中控制结构伺服系统:驱动部分的伺服电机及其驱动器,外加编码器构成通常所说的伺服系统伺服运动控制系统:除了驱动部分以外,还包括操作软件、控制部分、检测元件、传动机构和机械本体,各部件协调完成特定的运动轨迹或工艺过程。
1. 控制器控制器主要有四种:单片机系统,运动控制专用PLC系统,专用数控系统,PC+运动控制卡。
(1)单片机系统由单片机芯片、外围扩展芯片以及外围电路组成,作为运动控制系统的控制器。
单片机方案优点在于成本较低缺点:I/O口产生脉冲频率不高,控制精度受限,研发周期较长,调试过程烦琐。
(2)运动控制专用PLC系统许多品牌的PLC都可选配定位控制模块PLC通常都采用梯形图编程,可以与HMI进行通讯,在线修改运动参数PLC的循环扫描工作方式决定了它实时性能不是很高,要受PLC每步扫描时间的限制。
主要适用于运动过程比较简单、运动轨迹固定的设备,如送料设备、自动焊机等。
2020年实际交流伺服运动控制系统数学模型及仿真分析精品版第3章交流伺服运动控制系统模型及仿真分析PMSM(三相永磁同步电机,permanent magnet Synchronous motor)PMSM位置伺服系统具有位置环、速度环和电流环三闭环结构,电流环和速度环作为系统的内环,位置环为系统外环。
本章介绍交流伺服运动控制的体系结构及组成。
基于PMSM及其驱动器为核心的伺服运动控制系统,建立其数学模型并进行仿真分析。
从分析影响电流环性能的因素着手,提出了PMSM位置伺服系统电流环综合设计方案。
速度环的设计分别采用PI控制和变结构控制,位置环的设计采用变结构控制。
滑模变结构控制可以提高系统的响应速度、实现定位无超调、改善对负载扰动的鲁棒性和对参数变化的鲁棒性。
仿真模块基于MATLAB/Simulink和Powerlib模块库搭建起来的。
3.1 永磁同步电动机交流伺服运动控制系统交流伺服电动机---工厂自动化(FA)中广泛应用。
永磁同步电动机交流伺服运动控制系统的组成«Skip Record If...»图3-1 交流伺服运动控制系统的集中控制结构伺服系统:驱动部分的伺服电机及其驱动器,外加编码器构成通常所说的伺服系统伺服运动控制系统:除了驱动部分以外,还包括操作软件、控制部分、检测元件、传动机构和机械本体,各部件协调完成特定的运动轨迹或工艺过程。
1. 控制器控制器主要有四种:单片机系统,运动控制专用PLC系统,专用数控系统,PC+运动控制卡。
(1)单片机系统由单片机芯片、外围扩展芯片以及外围电路组成,作为运动控制系统的控制器。
单片机方案优点在于成本较低缺点:I/O口产生脉冲频率不高,控制精度受限,研发周期较长,调试过程烦琐。
(2)运动控制专用PLC系统许多品牌的PLC都可选配定位控制模块PLC通常都采用梯形图编程,可以与HMI进行通讯,在线修改运动参数PLC的循环扫描工作方式决定了它实时性能不是很高,要受PLC每步扫描时间的限制。