机械手时间最优脉动连续轨迹规划算法_朱世强 2010
- 格式:pdf
- 大小:950.40 KB
- 文档页数:6
基于遗传算法的机械手时间能耗最优平滑轨迹规划游玮;孔民秀;肖永强【摘要】本文提出了一种基于动力学模型的时间与能耗最优的平滑轨迹规划算法,考虑动力学与运动学约束条件,以时间与能量最优为优化目标,建立多关节机器人轨迹规划的数学模型,同时采用改进样条插值函数作为基础函数,保证运行过程中轨迹平滑及起始点与终止点速度、加速度及加加速度为零,之后采用基于遗传学原理的多目标优化算法NSGA-Ⅱ对时间与能耗进行优化,根据Pareto解集选择最优解,并针对一种3自由度重载机器人对提出的算法进行仿真,验证了该方法的可行性.【期刊名称】《机器人技术与应用》【年(卷),期】2015(000)005【总页数】6页(P25-30)【关键词】机器人;轨迹规划;改进样条函数;多目标优化;时间能量最优【作者】游玮;孔民秀;肖永强【作者单位】安徽埃夫特智能装备有限公司,安徽芜湖,241007;哈尔滨工业大学机电工程学院,哈尔滨,150001;安徽埃夫特智能装备有限公司,安徽芜湖,241007【正文语种】中文本文提出了一种基于动力学模型的时间与能耗最优的平滑轨迹规划算法,考虑动力学与运动学约束条件,以时间与能量最优为优化目标,建立多关节机器人轨迹规划的数学模型,同时采用改进样条插值函数作为基础函数,保证运行过程中轨迹平滑及起始点与终止点速度、加速度及加加速度为零,之后采用基于遗传学原理的多目标优化算法NSGAII对时间与能耗进行优化,根据Pareto解集选择最优解,并针对一种3自由度重载机器人对提出的算法进行仿真,验证了该方法的可行性。
本文是国家自然科学基金项目,项目编号51075086。
机器人轨迹规划是指根据一定规则和边界条件产生一些离散的运动指令作为机器人伺服回路的输入指令。
规划函数至少需要具有位置指令两阶导数连续,速度指令一阶导数连续,从而可以保证加速度信号连续,加加速度信号有界。
不充分光滑的运动指令会激起由于机械系统柔性所产生的谐振,在产生谐振的同时,轨迹跟踪误差会大幅度增加,谐振和冲击也会加速机器人驱动部件的磨损甚至损坏[1]。
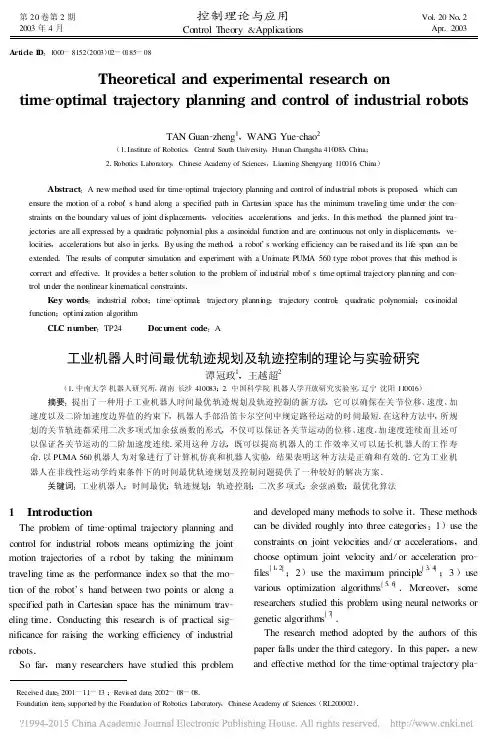
多约束条件下的机器人时间最优轨迹规划钱东海;马文罗;汪建伟;王伟东【摘要】提出了一种工业机器人时间最优轨迹规划及控制的新方法.对于笛卡尔空间中给定路径上的离散路径点,通过运动学逆解求得与之对应的关节节点序列,采用三次样条插值方法构造各关节位移、速度、加速度均连续的轨迹.在考虑关节空间中速度、加速度、加加速度约束条件的同时,确保机器人在笛卡尔空间各离散路径点处满足由给定路径所决定的速度约束条件,减小机器人运动路径与给定路径之间的误差.采用序列二次规划法求解上述非线性约束优化问题,进而规划出沿特定曲线方程运动的机器人时间最优轨迹.最后将上述算法应用于剪带机器人,证明了该算法的有效性和可行性.【期刊名称】《制造业自动化》【年(卷),期】2011(033)011【总页数】5页(P1-5)【关键词】工业机器人;时间最优;轨迹规划;序列二次规划;三次样条【作者】钱东海;马文罗;汪建伟;王伟东【作者单位】上海大学精密机械工程系上海,200072;上海大学精密机械工程系上海,200072;浙江中烟工业有限责任公司,杭州,310008;上海大学精密机械工程系上海,200072【正文语种】中文【中图分类】TP2420 引言机器人运动规划通常分为路径规划和轨迹规划上下两级[1]。
路径规划由机器人的任务规划器完成,用于在笛卡尔空间中或关节空间中产生一无碰撞的几何路径。
轨迹规划则是按照一定的性能指标确定沿着该几何路径运动时各关节的速度、加速度、加加速度、控制力矩的时间曲线。
机器人的时间最优轨迹规划是指以时间最短作为性能指标,并在满足各种约束的条件下优化机器人的运动轨迹,使机器人沿规定路径运动的时间最短。
由于轨迹规划是机械人控制的基础,其性能对机器人的工作效率,运动平稳性和能量消耗具有决定性意义,因此在过去十几年中,轨迹规划一直是机器人研究中的一大热点。
轨迹规划主要分成以下几类:时间最优轨迹规划,能量最优轨迹规划,冲击最优轨迹规划,以及混合最优轨迹规划。
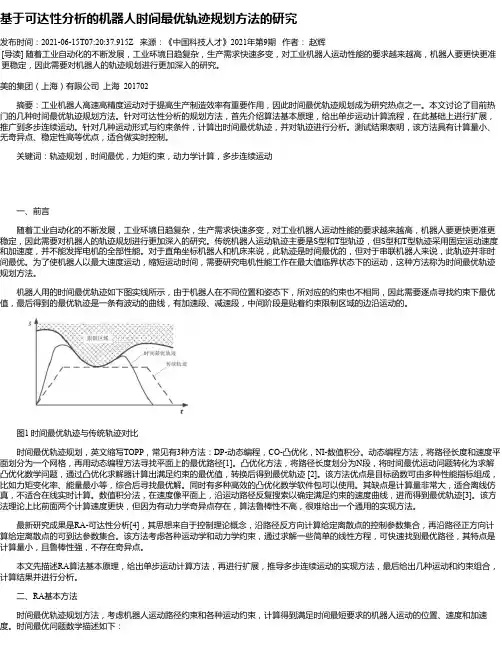
基于可达性分析的机器人时间最优轨迹规划方法的研究发布时间:2021-06-15T07:20:37.915Z 来源:《中国科技人才》2021年第9期作者:赵辉[导读] 随着工业自动化的不断发展,工业环境日趋复杂,生产需求快速多变,对工业机器人运动性能的要求越来越高,机器人要更快更准更稳定,因此需要对机器人的轨迹规划进行更加深入的研究。
美的集团(上海)有限公司上海 201702摘要:工业机器人高速高精度运动对于提高生产制造效率有重要作用,因此时间最优轨迹规划成为研究热点之一。
本文讨论了目前热门的几种时间最优轨迹规划方法。
针对可达性分析的规划方法,首先介绍算法基本原理,给出单步运动计算流程,在此基础上进行扩展,推广到多步连续运动。
针对几种运动形式与约束条件,计算出时间最优轨迹,并对轨迹进行分析。
测试结果表明,该方法具有计算量小、无奇异点、稳定性高等优点,适合做实时控制。
关键词:轨迹规划,时间最优,力矩约束,动力学计算,多步连续运动一、前言随着工业自动化的不断发展,工业环境日趋复杂,生产需求快速多变,对工业机器人运动性能的要求越来越高,机器人要更快更准更稳定,因此需要对机器人的轨迹规划进行更加深入的研究。
传统机器人运动轨迹主要是S型和T型轨迹,但S型和T型轨迹采用固定运动速度和加速度,并不能发挥电机的全部性能。
对于直角坐标机器人和机床来说,此轨迹是时间最优的,但对于串联机器人来说,此轨迹并非时间最优。
为了使机器人以最大速度运动,缩短运动时间,需要研究电机性能工作在最大值临界状态下的运动,这种方法称为时间最优轨迹规划方法。
机器人用的时间最优轨迹如下图实线所示,由于机器人在不同位置和姿态下,所对应的约束也不相同,因此需要逐点寻找约束下最优值,最后得到的最优轨迹是一条有波动的曲线,有加速段、减速段,中间阶段是贴着约束限制区域的边沿运动的。
图1 时间最优轨迹与传统轨迹对比时间最优轨迹规划,英文缩写TOPP,常见有3种方法:DP-动态编程,CO-凸优化,NI-数值积分。
基于改进DE算法的工业机器人时间最优轨迹规划王君;陈智龙;杨智勇;秦争争;游颖;魏琼【期刊名称】《组合机床与自动化加工技术》【年(卷),期】2018(000)006【摘要】为提高工业机器人的工作效率,提出一种进行时间最优轨迹规划的新算法.通过对已知任务轨迹的关键点进行运动学反解,求解与之对应的关节空间位置序列,并采用5次非均匀有理B样条曲线构造关节运动曲线,能够保证机器人各关节位置的准确性,实现各关节运动的速度、加速度以及二次加速度的连续性.通过改进差分进化( Differential Evolution 简称DE)算法,充分利用不可行解的信息,加强对边界的搜索,增强了算法的全局搜索能力.与遗传算法以及差分进化算法进行比较,利用该算法进行轨迹规划,结果显示该算法的搜索速度更快,所得的数值结果更小.【总页数】5页(P42-46)【作者】王君;陈智龙;杨智勇;秦争争;游颖;魏琼【作者单位】湖北工业大学机械工程学院机器人技术研究中心,武汉 430068;湖北工业大学现代制造质量工程湖北省重点实验室,武汉 430068;湖北工业大学机械工程学院机器人技术研究中心,武汉 430068;湖北工业大学现代制造质量工程湖北省重点实验室,武汉 430068;湖北工业大学机械工程学院机器人技术研究中心,武汉430068;湖北工业大学现代制造质量工程湖北省重点实验室,武汉 430068;湖北工业大学机械工程学院机器人技术研究中心,武汉 430068;湖北工业大学现代制造质量工程湖北省重点实验室,武汉 430068;湖北工业大学机械工程学院机器人技术研究中心,武汉 430068;湖北工业大学现代制造质量工程湖北省重点实验室,武汉430068;湖北工业大学机械工程学院机器人技术研究中心,武汉 430068;湖北工业大学现代制造质量工程湖北省重点实验室,武汉 430068【正文语种】中文【中图分类】TH165;TG659【相关文献】1.基于改进遗传算法的工业机器人能耗最优轨迹规划 [J], 操鹏飞;许德章;杨伟超;2.基于DE的时间最优6-DOF机械臂轨迹规划算法 [J], 王学琨;李刚;周东凯;杨兆阳3.基于遗传算法的工业机器人时间最优轨迹规划及仿真研究 [J], 郭清达;万传恒;史步海4.基于改进遗传算法的工业机器人能耗最优轨迹规划 [J], 操鹏飞;许德章;杨伟超5.基于改进粒子群算法的时间最优机械臂轨迹规划 [J], 黄超;茅健;马丽;向朝兴;王琛;阮大文因版权原因,仅展示原文概要,查看原文内容请购买。
机械手臂的运动学建模与轨迹规划方法研究近年来,机械手臂的应用越来越广泛,成为现代工业生产和科学研究的重要组成部分。
机械手臂的运动学建模和轨迹规划是机械手臂技术的关键问题,研究这些问题可以提高机械手臂的自主性和准确性。
一、机械手臂的运动学建模机械手臂的运动学建模是研究机械手臂运动规律的基础。
它描述了机械手臂末端执行器相对于基座的位置和姿态。
常用的方法有解析法和数值法。
解析法是通过分析机械结构和关节运动的几何关系,推导机械手臂的位置和姿态方程。
这种方法适用于简单的机械手臂结构,但对于复杂的机械手臂,解析法往往过于复杂,不易求解。
数值法是通过数值计算,逐步求解机械手臂的位置和姿态。
最常用的数值法是迭代法和解微分方程法。
迭代法在每个时间步长内计算机械手臂的位置和姿态,通过迭代过程逐渐收敛。
解微分方程法则通过求解机械手臂的运动微分方程,得到准确的位置和姿态。
二、机械手臂的轨迹规划方法机械手臂的轨迹规划是使机械手臂按照特定路径运动的方法。
它可以实现机械手臂的路径控制和精确定位。
常见的轨迹规划方法有插补法、优化法和仿真法。
插补法是通过在机械手臂关节之间插补中间点,来实现机械手臂的平滑运动。
这种方法可以通过线性插补、圆弧插补等方式,将目标点与起始点相连接,从而确定机械手臂的运动轨迹。
优化法是通过优化算法,寻找最优的机械手臂轨迹规划方案。
优化法能够考虑多个约束条件,并给出最佳的轨迹解决方案。
常见的优化方法有遗传算法、粒子群算法等。
仿真法是通过计算机模拟,模拟机械手臂的运动轨迹。
这种方法可以提前预测机械手臂在不同轨迹下的运动情况,帮助工程师进行设计和调试,减少实验成本和时间。
三、机械手臂运动学建模与轨迹规划方法的研究进展随着科学技术的不断发展,机械手臂运动学建模与轨迹规划方法的研究也有了长足的进展。
研究者们提出了许多新的方法和算法,使机械手臂的运动更加灵活和智能。
例如,现在有一种基于深度学习的运动学建模方法。
这种方法利用神经网络模型,通过训练数据学习机械手臂的运动规律,实现运动学建模。
时间最优轨迹人工势场法人工势场法是一种用于机器人路径规划和避障的方法,它通过在机器人的工作空间中建立一个虚拟的势场来进行轨迹规划。
这个势场包括两个部分:引力势场和斥力势场。
引力势场由目标位置产生,引导机器人向目标移动;而斥力势场由障碍物产生,确保机器人能够避开障碍物。
在时间最优轨迹的规划中,人工势场法的应用需要考虑以下几个关键要素:1. 构造空间映射:在位形空间(即机器人可能的所有位置和姿态的空间)中构造势场,并将工作空间中的轨迹映射到构造空间中。
2. 引力势场定义:引力势场( U_{att} \) 通常根据机器人当前位置\( q \) 到目标位置\( q_f \) 的欧氏距离来定义。
为了保证势场的连续性,可以选择抛物线型的引力势场,其表达式为( U_{att}(q) = \frac{1}{2} zeta \|q - q_f\|^2 \),其中\( \zeta \) 是引力增益。
3. 斥力势场定义:斥力势场通常与障碍物的距离成反比,用于在机器人靠近障碍物时产生较大的斥力,以保证安全距离。
4. 轨迹优化:在确定了引力和斥力势场之后,需要通过优化算法来找到一条既能够避开障碍物又能够尽快到达目标的轨迹。
5. 时间最优性:为了实现时间最优,可能需要在势场法的基础上结合其他优化技术,如动态规划、遗传算法等,以找到最短时间到达目标的路径。
6. 实时调整:在实际应用中,机器人的环境可能会动态变化,因此需要实时调整势场和轨迹以适应新的环境条件。
7. 计算效率:由于需要在每个时间步长内计算势场并更新轨迹,计算效率对于实时应用至关重要。
8. 局部最小值问题:人工势场法可能会遇到局部最小值问题,即机器人可能会被卡在一个非目标的低点位置。
为了解决这个问题,可以引入随机扰动或者使用其他逃离策略。
9. 参数调整:人工势场法的效果很大程度上取决于势场参数的选择,如引力和斥力的增益系数,这些参数需要根据具体的应用场景进行调整。
工业机器人冲击最优的轨迹规划算法杨锦涛;姜文刚;林永才【摘要】轨迹规划是工业机器人控制的一个重要组成部分,它对机器人性能的提高有着关键作用,为了解决目前笛卡尔空间轨迹规划加速度不连续,导致机器人运行过程中冲击过大而产生振动、机械磨损、使用寿命缩短等问题,研究冲击最优的轨迹规划算法.用S形速度曲线代替梯形速度曲线,对B样条进行插补,插补后得到笛卡尔空间的位置、速度、加速度参数,反推到关节空间进行仿真验证,仿真结果表明,利用S形速度曲线插补时各关节加速度连续,冲击有了明显减小.【期刊名称】《科学技术与工程》【年(卷),期】2014(014)028【总页数】6页(P64-69)【关键词】工业机器人;冲击最优;轨迹规划;S形曲线【作者】杨锦涛;姜文刚;林永才【作者单位】江苏科技大学电子信息学院,镇江212000;江苏科技大学电子信息学院,镇江212000;苏州时运机器人有限公司,苏州215600【正文语种】中文【中图分类】TP242.2随着工业机器人的发展越来越迅速,应用领域越来越广泛,对工业机器人的性能要求也越来越高。
轨迹规划是工业机器人控制的一个重要组成部分,它对机器人控制性能的提高有着关键作用,轨迹规划的一个重点就是使机器人能够按照期望轨迹平稳快速地运行,尽量避免位移、速度、加速度的突变,减少振动和冲击[1]。
轨迹规划可以在关节空间进行也可以在笛卡尔空间进行。
在关节空间进行轨迹规划,其优点是容易满足各关节运动学和动力学约束,计算简单,不会发生机构的奇异现象[1,2],缺点是各关节轨迹与末端执行器的轨迹是非线性的,所以关节空间的轨迹规划不容易预见末端执行器的运动[3],只有那些无路径要求的作业才能直接在关节空间进行规划,对于那些有路径严格要求的作业,如连续喷涂,弧焊,切割等,就必须在笛卡尔空间进行轨迹规划[1,3—5]。
为了解决目前笛卡尔空间轨迹规划中存在的冲击过大的问题,利用S 形速度曲线在笛卡尔空间对工业机器人进行轨迹规划,并进行仿真验证。
基于遗传算法的机械手时间-脉动优化轨迹规划牛韬1,嵇道扬2,马晨波2,孙见君2(1.江苏速力达精密科技有限公司, 江苏 南京 211299)(2.南京林业大学机械电子工程学院, 江苏 南京 210037)[摘 要] 为提高机械手的工作效率,同时确保机械手运行平稳,提出了一种基于遗传算法的时间-脉动优化轨迹规划方法。
通过机械手运动学逆运算获得与路径点相对应的关节空间序列点,采用三次B样条曲线构造初步的关节轨迹。
采用加权系数法定义目标函数,同时考虑关节的运动学约束,基于遗传算法求取时间-脉动优化轨迹。
最后以IRB6640工业机器人为研究对象进行仿真分析,结果表明,该方法可以得到较为理想的机械手运动轨迹,在满足工作要求的前提下提高了工作效率。
[关键词] 机械手;轨迹规划;遗传算法;时间-脉动;优化作者简介:牛韬(1965—),男,安徽铜陵人,硕士,高级工程师,江苏速力达精密科技有限公司总工程师。
机械手的轨迹规划作为轨迹跟踪控制的基础[1],是通过给定的路径点,在满足相关运动学和动力学约束的条件下,得到通过路径点的轨迹,并计算出机械手运动过程中的位移、速度、加速度等参数,其优劣对机械手的工作效率、运行平稳性等起着决定性作用。
由于路径点之间的轨迹复杂繁多,人们希望从中找到一条最优的轨迹。
其中,注重效率的时间最优轨迹规划的研究开展最早[2-3],也最为热门。
张红强[4]采用B 样条曲线构造机器人的轨迹,提出了一种基于改进混沌优化算法的机器人时间最优轨迹设计方法,并在关节空间与笛卡尔空间对PUMA560前三关节轨迹进行了优化计算。
付荣[5]等人根据机械臂运动学约束,提出了关节空间基于粒子群优化(PSO )的时间最优3-5-3多项式插值轨迹规划算法。
但是,时间最优的轨迹往往具有较大的脉动,脉动过大对机械手有不利的影响,会带来振动、机械磨损、寿命缩短、轨迹跟踪误差增大等问题[6-7]。
机械手最优脉动轨迹的研究应运而生,杨锦涛[8]等人用S 形速度曲线代替梯形速度曲线,对B 样条进行插补,插补后得到笛卡尔空间的位置、速度、加速度参数,得到脉动最优的轨迹曲线,并反推到关节空间进行仿真验证。
一、 机械手轨迹规划[17]本文所提出的机械手轨迹规划方案为在关节空间内进行,其具体思路为: 1. 利用几何关系,寻找各个插值点的坐标,并求机械手手爪在各个插值点处的运动速度与加速度,确定机械手端部在各个插值点处的位姿;2. 利用机器人学的相关知识(主要是逆运动学分析与逆雅可比矩阵计算),将上面所求的机械手手爪的位姿、速度与加速度转化为各关节的位姿、速度与加速度;3. 将上面所求的各关节运动参数进行样条曲线拟合插值。
【注】设定插补周期为s t ,对点位运动设定其运动时间为0t ,对直线运动和圆弧运动设定其运动速度为v 。
(一) 点位运动1. 设定起始点()000Z Y X 与终止点()e e e Z Y X ;2. 分别对起始点与终止点进行逆运动学计算得0i θ及ie θ;)6,5,4,3,2,1(=i3. 分别对i θ进行线性插值000i i ie i t t θθθθ+-=。
)6,5,4,3,2,1(=i(二) 直线运动1. 设定起始点()000Z Y X 与终止点()e e e Z Y X ;2. 计算直线长度L ,机械手手爪在各点处的运动速度()T v ω,插补步长d ,插补总步数N 及插补运动中各坐标轴的增量X ∆、Y ∆和Z ∆:①202020)()()(Z Z Y Y X X L e e e -+-+-=;②()z y x e e ev v v L Z Z LY Y L X X v v =⎪⎭⎫ ⎝⎛---=000 ,故()()000z y x v v v v =ω; ③s vt d =;④⎥⎦⎤⎢⎣⎡+=1d L N ;⑤N X X X e 0-=∆、N Y Y Y e 0-=∆和NZ Z Z e 0-=∆。
3. 由此可以求得各插值点的坐标值:X X X i i ∆+=+1;Y Y Y i i ∆+=+1及Z Z Z i i ∆+=+1。
4. 分别对各插值点进行逆运动学计算,并求其对应的逆雅可比矩阵,得()ijij ijθθθ。
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201710409081.4(22)申请日 2017.06.02(71)申请人 华中科技大学地址 430074 湖北省武汉市洪山区珞喻路1037号(72)发明人 尹周平 韩世博 王铁成 黎波 张阳 郑礼洋 何健 黄冠群 (74)专利代理机构 华中科技大学专利中心42201代理人 梁鹏 曹葆青(51)Int.Cl.B25J 9/16(2006.01)(54)发明名称一种机械臂的轨迹规划方法(57)摘要本发明属于机器人控制相关技术领域,并公开了一种机械臂的轨迹规划方法,包括:对机械臂获取包括其末端初始和终点位姿、预定轨迹、初始关节向量和终点关节向量等参数;在预定轨迹上选择一系列的特征点,并标记当前特征点位姿、当前关节向量、下一个特征点位姿和下一特征点关节向量;将下一个特征点关节向量与当前特征点关节向量执行计算,并依照计算结果来执行关节空间轨迹规划处理和规划子算法处理,由此获得更为优化的轨迹规划;对其余特征点依照上述流程予以循环处理,直至机械臂的末端到达终点位姿为止。
通过本发明,能够大大减少总体计算量、减少计算误差,同时显著提高轨迹规划的效率。
权利要求书1页 说明书4页 附图2页CN 107030702 A 2017.08.11C N 107030702A1.一种机械臂的轨迹规划方法,其特征在于,该方法包括下列步骤:(1)针对作为规划对象的机械臂,获取包括与它的末端相关的多个参数,包括初始位姿,终点位姿和预定轨迹;然后计算获得对应的初始关节向量和终点关节向量;(2)在所述预定轨迹上选择一系列的特征点,并将机械臂末端的当前特征点位姿记为Y i ,对应的关节向量记计为O i ,下一个特征点位姿记为Y i+1,对应的下一特征点关节向量计为O i+1,其中i=1,2,3,…且表示各特征点的次序编号;(3)计算ΔO=O i+1-O i ;(4)依照步骤(3)的计算结果,执行以下子步骤:(41)当ΔO中绝对值最大的元素小于或等于预设的第一阈值b 0时,首先对O i 和O i+1两者之间的运行段执行第一插值操作,由此获得多个中间关节向量O i1,O i2,…,O iy ,其中y表示第一插值操作过程中插值点的总数量;接着,依照所获得的多个中间关节向量O i1,O i2,…,O iy ,使机械臂运行至下一特征点,然后转入步骤(5);当ΔO中绝对值最大的元素大于预设的第一阈值b 0时,直接转入步骤(42);(42)当ΔO中前k个元素的绝对值均小于或等于预设的第二阈值b 1时,首先对O i 和O i+1的前k个元素进行第二插值操作,由此获得前k个关节的关节向量O k1,O k2,…,O ky ,同时确定第k +1个关节所对应的位姿Y k1,Y k2,…,Y ky ,其中y表示第二插值操作过程中插值点的总数量;接着,对Y i 和Y i+1两者之间执行插值点总数量同样为y的第三插值操作,并获得多个插值点Y i1,Y i2,…,Y iy ;最后,分别针对Y k1,Y k2,…,Y ky 和Y i1,Y i2,…,Y iy ,计算获得第k+1个关节到最后一个关节的关节向量,并将其与对应的O k1,O k2,…,O ky 结合以获得一系列完整的关节向量,并依照该一系列关节向量完整的使机械臂运行至下一特征点,然后转入步骤(5);(5)使i=i+1,并判断机械臂的末端是否到达终点位姿,若否,则返回至步骤(3)予以循环,直至机械臂的末端到达终点位姿为止,由此完成整体的轨迹规划过程。
基于麻雀算法的机械手时间最优轨迹规划
郭北涛;姜旭;张丽秀
【期刊名称】《组合机床与自动化加工技术》
【年(卷),期】2022()3
【摘要】针对五自由度凸轮工件缺陷检测的机械手时间最优轨迹规划问题,利用D-H表示法建立机械手运动模型,通过正运动学、逆运动学分析求解各关节角度变化值,利用三次样条曲线在关节空间中建立机械手运动轨迹。
同时在满足各关节速度、加速度、加加速度限制范围的基础上,采用麻雀算法通过约束条件外加罚函数改进
个体适应度函数,对三次样条曲线轨迹实现时间最优规划。
最后利用MATLAB软件进行机械手轨迹运动仿真,仿真结果表明,经麻雀算法优化后的运动轨迹时间明显减少,工作效率大幅度提高,最后通过机械手检测实验从而证明了所研究方法的可靠性
和有效性。
【总页数】5页(P21-25)
【作者】郭北涛;姜旭;张丽秀
【作者单位】沈阳化工大学机械与动力工程学院;沈阳建筑大学交通与机械工程学
院
【正文语种】中文
【中图分类】TH112;TG66
【相关文献】
1.基于IAGA的机械手时间最优轨迹规划
2.基于时间最优的3R机械手轨迹规划研究
3.基于遗传算法的机械手时间能耗最优平滑轨迹规划
4.机械手时间最优脉动连续轨迹规划算法
5.基于多体动力学特性的机械手时间最优轨迹规划
因版权原因,仅展示原文概要,查看原文内容请购买。
机械手的运动学最短时间轨迹规划
叶桦;冯纯伯
【期刊名称】《东南大学学报:自然科学版》
【年(卷),期】1990(020)003
【摘要】用相平面分析法,解决了在有最大关节速度和加速度限制的条件下使机械手以最短时间沿指定空间道路运动的轨迹规划问题。
以PUMA-560前3个关节为对象给出了仿真结果。
【总页数】7页(P74-80)
【作者】叶桦;冯纯伯
【作者单位】不详;不详
【正文语种】中文
【中图分类】TP241.027
【相关文献】
1.6自由度IRB-120机械手运动学分析和轨迹规划 [J], 田粒卜;张利钦
2.6自由度IRB-120机械手运动学分析和轨迹规划 [J], 田粒卜;张利钦;
3.基于D-H法的包装分拣机械手运动学分析和轨迹规划 [J], 付香雪;韩顺杰;张冬冬;于佳文
4.四自由度焊接机械手臂运动学建模与轨迹规划 [J], 孙银生;贺艳娜;田国豪
5.5-DOF机械手运动学与轨迹规划分析 [J], 刘亚文;周志远;王杰;余联庆;李红军因版权原因,仅展示原文概要,查看原文内容请购买。