机械手轨迹规划及仿真
- 格式:pdf
- 大小:1.34 MB
- 文档页数:26
基于ADAMS的搬运机械手轨迹规划与仿真
郭柏林;胡正义
【期刊名称】《湖北工业大学学报》
【年(卷),期】2007(022)004
【摘要】对一种新型机械手的运动轨迹进行了规划分析,并结合计算机对该系统运动进行了仿真,得到了该机械手的一些动态参数,为该机械手物理样机的实现提供了科学依据.
【总页数】3页(P37-39)
【作者】郭柏林;胡正义
【作者单位】武汉理工大学机电工程学院,湖北,武汉,430070;武汉理工大学机电工程学院,湖北,武汉,430070
【正文语种】中文
【中图分类】TH113
【相关文献】
1.基于ADAMS的硅片传输机器人轨迹规划及仿真 [J], 张昊;孙强;李龙晶;丛明
2.基于ADAMS搬运机械手轨迹规划 [J], 赵海芳;陈莹;刘祎
3.基于MATLAB和ADAMS的并联机器人的轨迹规划仿真研究 [J], 王瑞芳;刘林;邱继红
4.基于ADAMS的3-PUU并联机构坐标测量机的轨迹规划及仿真 [J], 黄慧娟; 欧阳凯; 胡鹏浩; 胡毅
5.基于ADAMS的搬运机械手运动学及动力学仿真分析 [J], 王建军
因版权原因,仅展示原文概要,查看原文内容请购买。
山东理工大学硕士学位论文6R关节型机器人轨迹规划算法研究及仿真姓名:刘好明申请学位级别:硕士专业:机械电子工程指导教师:王效岳20080420山东理丁人学硕十学位论文摘要摘要工业机器人是机器人中的一个重要分支,是机器人领域的重要研究发展方向。
对工业机器人运动轨迹规划和控制的研究,一直受到人们的普遍关注。
关节型工业机器人以其工作范围大、动作灵活、结构紧凑等特点在机器人中备受设计者和使用者青睐。
本文基于模块化设计思想,设计实现一定焊接任务的AS.MR0bot6R关节型机器人,采用D-H法对该关节型机器人的机构和运动学进行分析,建立了该关节型机器人的运动学模型;根据目标路径,求出机器人的逆解,在关节空间和操作空间轨迹规划过程中,分别利用模糊C均值聚类算法、最邻近和K均值聚类的综合应用来训练网络,实现了ImF神经网络的改进,并用该算法实现了轨迹优化,达到了轨迹规划的快速收敛和近似逼近,具有很强的容错能力,避免了因约束点的输入顺序和野值产生的影响,使得规划轨迹达到工程上的要求,从而验证了该算法的可行性。
然后应用虚拟样机技术,在机械系统动力学软件AD舢vIS上建立该Asm依0bot6R关节型机器人的仿真模型,按照已经规划好的末端工具运动轨迹,对实验过程进行轨迹规划仿真,并研究了该关节型机器人的运动学指标在仿真运动过程中的变化情况。
从理论分析和仿真实验结果的一致性,证明了该改进的I国F神经网络算法的有效性、合理性和在轨迹规划方面的可行性。
改进的RBF神经网络算法可以用于关节型机器人教学或在使用关节型机器人的工业环境中进行仿真演示或实时检测,为机器人轨迹规划优化算法的研究提供了理论上的有力支持,具有较高的应用价值。
关键词:工业机器人;运动学;轨迹规划;RBF神经网络;聚类;虚拟样机山东理T人学硕Ij学位论文Abs仃actAbStraCtAsanimportamb1.觚chi11therobotfIamily'iIldl倒时rdbotanddeVelopment面emation.The蛔ject0巧p1黜血gdesi弘eraIldB2Lsedallserits咖lisanilIlI,ortantrese锄chandhaVebeeIlpaideIlou曲a:tt枷onbyresearchersiIlthe、Ⅳorld.hlmegroupofmbots,Ⅱleaniculatedrd)otiscaredbyf.0ritsbroadworkrallge,fleXiblemoVenlent狃dc伽叩actS廿uc嘶.achieveareonmodul碰zation,d商盟a6DOFmaIlipulacorAS一瑚R0bot6Rwhichcallcertaillassi缪mlem.h廿lispaper,mekiIl锄acicsa11d锄alyzedthebymeanSofDeIl撕t-Hartellbe唱m甜10d,ulenareme鼢aticaldyn锄icsofmeandmanipulatordyll锄icmodeloftoilllproVedRBFmallipulatoreSta:blistled.Anerthei11versekineIIlaticsofrdbotbeings01vedwimⅡ1epamiIlhadp0硫edNeturalp础,mem嘶onjoil】庀sspacew嬲opt妇izedaCC删ngN咖ork、7l耘chbeell埘nedbyFllzzyCapplicationofnearestandKmeaIlscluste打ngdIⅡ缸gpl础g.T11is面mmeticMeansclust甜ngandⅡleg肌eralmal(eⅡ1ef掇tlleconve唱ence锄dmista:ke锄al謦IlIla缸on姗e仇leaIldavoidmeiIlf&tionoftlleinputofderofexist饥ceofⅡlemeres砸ctedpoint甜ldtlleerracic洲atchnum嘶calValue,aIlda出eVes嘲uestofthep删ect,allofⅡ1isvalidatesitsM妇gacc删nguseofmevimlalpr0咖iIlge丘硎Velless锄dfe硒ibil咄tec王1110log弘Ⅱ1emallipul砷or‟smodelisfoundedillofmechallicalso脚areADAMSⅡ1atdevelopedfordynaIllics狮alySissyst锄.Fuml咖ore,t0meplallodpam,mech觚gesofmecilleIIlatic砒lddyn砒lliciIldexesofⅡlecourseaniculatIcdmaIlipulatori11theⅡlisapproachrobotareofmoviIlgarestudied.Thee岱oct~eIlessandValidi锣ofaproVedbyⅡle0瞅ical锄alySisa11d幽ulationresu坻.n谢Uhelpi叫)roVedRBF10tiIlt11ete犯11iIlg,desigllil唱,researClling锄dselectillg.111isnetul面n舐vod【a打Ⅱlmetich舔greatapplicationvalue锄dpr0Videstheor以cill如nnation南r吐le臼匈ecto巧pl础gKeyofrobot.words:hldu呻Robot;陆eIllalics;删eCt吖P1锄ing;C1埘e血g;ⅦtualmtotypeRBFNetu]ralN咖础;独创性声.明本人声明所呈交的论文是我个人在导师指导下进行的研究工作及取得的研究成果。
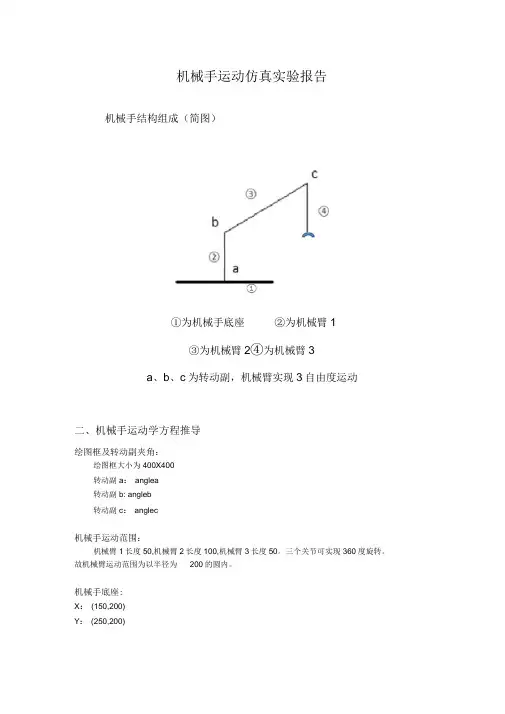
机械手运动仿真实验报告机械手结构组成(简图)①①为机械手底座②为机械臂1③为机械臂2④为机械臂3a、b、c为转动副,机械臂实现3自由度运动二、机械手运动学方程推导绘图框及转动副夹角:绘图框大小为400X400转动副a: anglea转动副b: angleb转动副c: anglec机械手运动范围:机械臂1长度50,机械臂2长度100,机械臂3长度50。
三个关节可实现360度旋转。
故机械臂运动范围为以半径为200的圆内。
机械手底座:X: (150,200)Y: (250,200)机械臂1:X1:(200,200)Y1:((200+ 50 * cos(anglea*3.1415926/180)),(200-50 * sin(anglea*3.1415926/180)))机械臂2:X2:((200+ 50 * cos(anglea*3.1415926/180)),(200-50* sin(anglea*3.1415926/180)))Y2:((200 + 50 * cos(anglea*3.1415926/180)+100 * cos(angleb*3.1415926/180)), (200 - 50 * sin (anglea*3.1415926/180)-100* sin(angleb*3.1415926/180)))机械臂3:X3:((200 + 50 * cos(anglea*3.1415926/180)+100 * cos(angleb*3.1415926/180)), (200 - 50 * sin (angLea*3.1415926/180)-100* sin(angleb*3.1415926/180)))Y3:( (200 + 50 * cos(anglea*3.1415926/180)+100 * cos(angleb*3.1415926/180)+50 * cos(anglec *3.1415926/180)), (200 - 50 * sin(anglea*3.1415926/180)-100* sin(angleb*3.1415926/180)-50 * sin(anglec*3.1415926/180)))三、机械手运动仿真程序编写(关键函数代码)pWnd->Invalidate(); pWnd->UpdateWindow() ;pDC->Rectangle(0,0,400,400);DrawRobotBase();DrawRobotMemberBar1(m_fanglea);DrawRobotMemberBar2(m_fanglea, m_fangleb);DrawRobotMemberBar3(m_fanglea, m_fangleb, m_fanglec);// 绘制底座及其颜色代码void CDrawRobotDlg::DrawRobotBase() {CPen SuiyiPen;SuiyiPen.CreatePen(PS_SOLID,Wide,RGB(hong, lv, lan));CPen *oldPen;oldPen = pDC->SelectObject(&SuiyiPen);pDC->MoveTo(150,200);pDC->LineTo(250,200);pDC->SelectObject(oldPen);DeleteObject(SuiyiPen) ;}// 绘制杆1void CDrawRobotDlg::DrawRobotMemberBar1(float anglea){pDC->MoveTo(200,200);pDC->LineTo(int(200+ 50 * cos(anglea*3.1415926/180)),int(200-50 * sin(anglea*3.1415926/180)));}// 绘制杆2void CDrawRobotDlg::DrawRobotMemberBar2(float anglea,float angleb){pDC->MoveTo(int(200+ 50 * cos(anglea*3.1415926/180)),int(200-50* sin (anglea*3.1415926/180)));pDC->LineTo(int(200 + 50 * cos(anglea*3.1415926/180)+100 * cos(angleb *3.1415926/180)),int(200 - 50 * sin(anglea*3.1415926/180)-100* sin(angleb*3.1415926/180)));}// 绘制杆3void CDrawRobotDlg::DrawRobotMemberBar3(float anglea, float angleb, float anglec){pDC->MoveTo(int(200 + 50 * cos(anglea*3.1415926/180)+100 * cos(angleb *3.1415926/180)),int(200 - 50 * sin(anglea*3.1415926/180)-100* sin(angleb *3.1415926/180)));pDC->LineTo(int(200 + 50 * cos(anglea*3.1415926/180)+100 * cos(angleb *3.1415926/180)+50 * cos(anglec*3.1415926/180)),int(200 - 50 * sin(anglea *3.1415926/180)-100* sin(angleb*3.1415926/180)-50* sin(anglec*3.1415926 /180)));}// 转动副a 加减角度按钮代码void CDrawRobotDlg::OnButton 1(){m_fanglea = m_fanglea + 1 ;UpdateData(FALSE);Invalidate(FALSE) ;}void CDrawRobotDlg::OnButton2(){m_fanglea = m_fanglea - 1 ;UpdateData(FALSE);Invalidate(FALSE) ;}// 转动副b 加减角度按钮代码void CDrawRobotDlg::OnButton3(){m_fangleb = m_fangleb + 1 ;UpdateData(FALSE);Invalidate(FALSE) ;}void CDrawRobotDlg::OnButton4(){m_fangleb = m_fangleb - 1 ;UpdateData(FALSE);Invalidate(FALSE) ;}〃转动副c加减角度按钮代码void CDrawRobotDlg::OnButton5(){m_fanglec = m_fanglec + 1 ;UpdateData(FALSE);Invalidate(FALSE) ;}void CDrawRobotDlg::OnButton6(){m_fanglec = m_fanglec - 1 ;UpdateData(FALSE);Invalidate(FALSE) ;}// 机械臂1 启动按钮代码void CDrawRobotDlg::OnButton7(){AfxBeginThread(MoveThreada, this) ; }// 机械臂2 启动按钮代码void CDrawRobotDlg::OnButton8(){AfxBeginThread(MoveThreadb, this) ; }// 机械臂3 启动按钮代码void CDrawRobotDlg::OnButton9(){AfxBeginThread(MoveThreadc, this) ;}// 机械臂1 旋转代码UINT CDrawRobotDlg::MoveThreada(void *parama){CDrawRobotDlg *pDlga = (CDrawRobotDlg*)parama ;while(1){pDlga->m_fanglea = pDlga->m_fanglea + 1 ;pDlga->Invalidate(FALSE) ;Sleep(100) ;}return 0 ;}// 机械臂2 旋转代码UINT CDrawRobotDlg::MoveThreadb(void *paramb){CDrawRobotDlg *pDlgb = (CDrawRobotDlg*)paramb ;while(1){pDlgb->m_fangleb = pDlgb->m_fangleb + 1 ;pDlgb->Invalidate(FALSE) ;Sleep(100) ;}return 0 ;}// 机械臂3 旋转代码UINT CDrawRobotDlg::MoveThreadc(void *paramc){CDrawRobotDlg *pDlgc = (CDrawRobotDlg*)paramc ;while(1){pDlgc->m_fanglec = pDlgc->m_fanglec + 1 ;pDlgc->Invalidate(FALSE) ;Sleep(100) ;}return 0 ;}// 更新按钮代码void CDrawRobotDlg::OnButtonRefresh0(){UpdateData(TRUE);Invalidate(FALSE);四、软件界面截图与说明界面左边为演示界面,右边为数据输入界面及运行按钮。
机械手逆运动学分析、仿真及轨迹规划课题来源随着机械及其控制科学的发展,具有模拟人体手臂运动功能,用以完成按固定程序抓取、搬运物件操作的机械手应运而生。
它不但可以实现生产的机械化和自动化,而且能够在特殊环境下工作以保护人身安全,因此它广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
为了适应先进社会生产力的发展要求,我们应对其原理技术有更深的了解和掌握。
然而由于设备、专业知识储备以及时间的限制,此课题仅针对机械手的逆运动学分析、逆雅可比矩阵求解及轨迹规划进行理论性研究。
机器人的基本运动学分析可分为正运动学分析与逆运动学分析两个范畴:所谓正运动学,就是解决将运动参数由关节空间向操作空间映射的问题;而所谓逆运动学,就是解决将运动参数由操作空间向关节空间映射的问题。
换言之,正运动学是结果逻辑,而逆运动学是条件逻辑。
机器人的轨迹规划是通过具体的技术手段使机器人端部执行机构按预定的轨迹实现实时运动。
本课题正是通过Matlab 编程的方法实现机器人逆运动学分析及轨迹规划两大问题运算结果的可视化。
一、本课题的基本内容1.了解关于机械手的相关知识、表示术语等;2.学习并掌握机械手逆运动学的分析方法——坐标变换法;3.研究机械手的逆雅可比矩阵的求解方法;4.基于Matlab实现教学机械手逆运动学编程,并封装;5.研究直线运动和圆弧运动轨迹规划算法及基于Matlab的编程实现。
二、本课题的重点和难点1.编制出实现机器人运动学分析的Matlab程序,实现运算结果的可视化;2.系统的正确封装;三、论文提纲1.绪论;2.机械手概况;3.根据机械手的模型图建立D-H坐标系;4.确定机械手连杆及关节参数;5.确定相邻两连杆间的坐标变换矩阵及其逆变换;6.为所研究的机械手做正运动学分析;7.为所研究的机械手做逆运动学分析;8.研究机械手对应形位逆雅可比矩阵的算法;9.在关节空间实现机械手的轨迹规划;10.用Matlab实现上述操作并进行仿真验证;11.参考文献,附录及谢辞。
机械手臂的轨迹规划与控制策略研究引言机械手臂是一种重要的工业机器人,广泛应用于生产制造、物流搬运、医疗服务等领域。
在机械手臂的操作过程中,轨迹规划和控制策略起着至关重要的作用。
本文将对机械手臂的轨迹规划和控制策略进行研究和分析,探讨其应用和发展前景。
一、机械手臂的轨迹规划1.机械手臂轨迹规划的重要性机械手臂的轨迹规划是指确定机械手臂在操作过程中的运动路径,包括位置、速度和加速度等方面的规划。
合理的轨迹规划可以确保机械手臂的稳定性、高效性和安全性,提高工作精度和效率。
2.常用的机械手臂轨迹规划方法目前,常用的机械手臂轨迹规划方法主要包括插补法和优化法。
插补法是将机械手臂的运动轨迹分段线性插补,常见的插补方法有线性插值法、圆弧插值法和样条插值法。
线性插值法简单直观,但对于复杂轨迹有一定的局限性;圆弧插值法适用于弯曲轨迹的规划,但对于非光滑曲线的插补效果较差;样条插值法能够更好地平滑轨迹,但计算复杂度高。
优化法是通过数学建模和优化算法求解最佳轨迹规划问题。
其中,最优控制和遗传算法是常用的优化方法。
最优控制方法通过最小化或最大化性能指标,寻找最佳控制信号,使机械手臂的运动轨迹最优。
遗传算法则通过模拟生物进化的过程,对机械手臂的轨迹进行优化。
3.机械手臂轨迹规划中存在的挑战机械手臂轨迹规划中存在着多样性和复杂性的挑战。
首先,机械手臂所处的工作环境多种多样,规划的轨迹需要适应不同的工作空间和约束条件。
其次,机械手臂的运动是非线性和多自由度的,轨迹规划需要克服非线性和高维度的问题。
此外,机械手臂的轨迹规划需要在保持稳定和安全的前提下,同时满足高效和灵活的要求。
二、机械手臂的控制策略1.机械手臂控制的基本概念机械手臂的控制策略是指通过对机械手臂的控制信号进行调节和优化,实现对机械手臂运动的准确控制。
机械手臂控制策略主要包括位置控制、速度控制和力控制等。
位置控制是指通过控制机械手臂的位置信号,使机械手臂在指定的目标位置与期望轨迹上运动。
0 引言工业机器人能够代替人工完成枯燥、重复性较高的工作,大幅提高生产效率,甚至可以完成一些人工无法完成的危险性任务。
虽然单臂机器人已经得到了广泛应用,但随着生产作业越来越复杂,单臂机器人在某些场合下已经无法胜任,例如较为复杂的搬运、柔性装配等应用,而双臂机器人则能完成这些工作任务。
因此,研究双臂机器人的运动轨迹规划,可以提高机器人的双臂协作、协调能力,扩展其应用领域[1]。
双臂机器人的轨迹规划研究与仿真1刘子贵(江门职业技术学院 广东省江门市 529090)概 要:本文以Baxter双臂机器人为研究对象,借助三次多项式插值法、五次多项式插值法等关节变量空间轨迹规划方法,采用D-H法建立机器人的连杆坐标系,利用Robotics Toolbox构建运动学模型,仿真双臂机器人7个关节的角度轨迹曲线、速度曲线和加速度曲线。
通过对比分析,具有6个约束条件的五次多项式插值法可以让加速度曲线不存在跳变,各关节运动轨迹更加平稳、连续,能够提升双臂机器人运动的平稳性、双臂协作能力,让其完成复杂的生产工作任务。
关键词:双臂机器人;Robotics Toolbox;关节变量;轨迹规划Abstract: In this paper, the Baxter dual arm robot is taken as the research object. By means of joint variable space trajectory planning methods such as cubic polynomial interpolation and quintic polynomial interpolation, the D-H method is used to establish the linkage coordinate system of the robot, and the kinematics model is built by using the robotics toolbox to simulate the angle trajectory curve, velocity curve and acceleration curve of the seven joints of the dual arm robot. Through the comparative analysis, the quintic polynomial interpolation method with six constraints can make the acceleration curve without jump, and the motion track of each joint is more stable and continuous. It can improve the stability of the movement of the dual arm robot, the ability of cooperation between the two arms, and make it complete the complex production tasks.Key words: Dual arm robot; Robotics toolbox; Joint variable; Trajectory planning1 轨迹规划方法关节变量空间轨迹规划的常见方法有三次多项式插值和五阶多项式插值等方法。
物料抓取机械手设计及运动仿真随着工业自动化的不断发展,越来越多的制造和加工过程采用机器人和自动化设备来完成。
其中,物料抓取机械手的设计和运动仿真对于实现自动化生产流程的高效运行具有至关重要的作用。
本文将介绍物料抓取机械手的设计要点及运动仿真的重要性,并探讨相关的问题及解决方案。
物料抓取机械手的设计首先需要确定其结构形式和基本参数。
一般而言,机械手主要由手部机构、腕部机构和臂部机构组成。
手部机构负责抓取物料,腕部机构则负责手腕的姿态调整,臂部机构支持机械手的移动。
根据实际生产需要,可在设计中针对不同的物料特性和抓取要求进行结构优化。
物料抓取机械手的运动过程中涉及到复杂的动力学关系。
因此,在设计中需要建立相应的动力学模型,以实现精确的运动控制和抓取策略。
动力学模型需要考虑重力、摩擦力、空气阻力等各种外部力的影响,同时还需要机械内部的动态特性。
物料抓取机械手的驱动系统是实现抓取动作的关键部分。
根据不同的应用场景和性能需求,可选择不同的驱动方式,如液压驱动、气压驱动、电动驱动等。
在设计中,需要根据实际情况选择合适的驱动方式和驱动元件,并综合考虑驱动系统的布局和重量等因素。
运动仿真是在设计阶段对机械系统进行模拟分析和验证的方法。
通过运动仿真,可以在实际制造之前发现和解决潜在的问题,提高机械系统的性能和质量。
在物料抓取机械手的设计中,运动仿真可用于验证结构设计、优化动力学模型以及评估抓取策略的可行性。
通过运动仿真,可以模拟机械手的实际运动过程,并精确计算出抓取时间、抓取位置、抓取力度等关键参数,为实际制造提供重要参考。
运动仿真主要通过计算机辅助设计软件来实现。
这些软件通常具有强大的建模和分析功能,可以建立详细的机械系统模型,并进行动态性能分析和优化。
一些软件还提供了与控制系统仿真工具的集成,以实现整个系统的联合仿真。
物料抓取机械手的设计及运动仿真在自动化生产中具有极其重要的意义。
通过对机械手结构的合理设计、动力学模型的精确建立以及驱动系统的优化,可以有效地提高机械手的性能和质量。
搬运机械手设计及运动仿真摘要:机械手是近代自动控制领域中出现的一项新技术,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力受到人们的广泛重视和欢迎。
实践证明,机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。
此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
本课题通过应用SolidWorks对机械手进行结构设计和液压传动原理设计,运用SolidWorks 技术对上料机械手进行三维实体造型,并进行了运动仿真,使其能将基本的运动更具体的展现在人们面前。
关键词:机械手;UG;自由度;液压;自动化Abstract:Manipulator is a new technology in the field of modern automatic control, It is an imitation of part of the human upper limb function , Scheduled for delivery in accordance with the requirements of holding a work piece or tool automation technology and equipment operation , Automation of industrial production, and promote the further development of industrial production plays an important role. So it has a great vitality and thus be widely valued and welcomed. Practice has proved that the robot can replace the heavy manual labor, significantly reduced labor intensity and improve working conditions and raise the level of labor productivity and automation. That often appears in industrial production of heavy work piece handling and long-term frequent monotonous operations, the use of mechanical hand to be effective. In addition, it can at a high temperature, low temperature, Sham Shui Po, the universe, radioactive and other toxic pollution of the environment under the conditions of operation, but also to demonstrate its superiority, has broad prospects.This issue through the application of SolidWorks to proceed with the structural design of mechanical and hydraulic principles of design, technology use SolidWorks feeding robot three-dimensional solid modeling and simulation of the movement, its basic movements can be more specific in the show people before.Key Words:Manipulator;SolidWorks;degree of freedom;Hydraulic;Automation目录1 前言 (1)2 抓取机构设计 (1)2.1 手部的设计和计算 (1)2.1.1手部设计的要求 (1)2.1.2 拉紧装置原理 (2)2.2 腕部的设计计算 (4)2.3臂伸缩机构设计 (6)3 液压系统原理设计及草图 (9)3.1手部抓取缸 (9)3.2腕部摆动液压回路 (10)3.3小臂伸缩缸液压回路 (11)3.4总体系统图 (12)4 机身机座的结构设计 (13)4.1电机的选择 (13)4.2减速器的选择 (15)4.3螺柱的设计与校核 (15)5 机械手的定位与平稳性 (17)5.1常用的定位方式 (17)5.2影响平稳性和定位精度的因素 (17)5.3机械手运动的缓冲装置 (18)6 机械手的控制 (19)7 机械手的组成与分类 (20)7.1机械手组成 (20)7.2机械手分类 (21)8 机械手的三维造型及运动仿真 (23)总结 (24)致谢.............................................................. 错误!未定义书签。
搬运机械手仿真设计和制作随着工业自动化的不断发展,搬运机械手作为一种重要的自动化设备,在工业生产中发挥着越来越重要的作用。
本文主要探讨搬运机械手的仿真设计与制作过程,以期为相关领域的研究和应用提供有益的参考。
需要根据实际应用需求确定机械结构方案。
搬运机械手需要实现哪些动作?需要抓取和搬运哪些类型的物品?针对这些问题,我们需要展开一系列的分析和研究。
在此基础上,设计出满足要求的基本结构方案,包括机械臂、抓手、驱动系统等主要部件。
为了对搬运机械手进行精确的控制,需要建立其数学模型。
数学模型能够描述机械手的运动规律,以及各部件之间的相互关系。
常用的数学模型包括运动学模型和动力学模型。
其中,运动学模型主要描述机械手的位姿和运动轨迹,动力学模型则描述机械手在运动过程中的力和速度等物理量之间的关系。
仿真程序设计是搬运机械手仿真设计的重要环节。
在这一阶段,需要选择合适的仿真软件,如Adams、Simulink等,并根据之前建立的数学模型编写仿真程序。
仿真程序需要能够模拟机械手的实际运行情况,对各种工况进行仿真测试,以验证设计的有效性和可靠性。
在仿真程序设计完成后,需要制作物理样机以验证设计效果。
根据设计方案制作机械零件,并进行组装、调试和测试。
在此过程中,需要对机械手进行不断的优化和改进,使其在抓取、搬运等操作中具有更好的稳定性和效率。
当物理样机达到预期效果后,可以进入批量生产和实际应用阶段。
搬运机械手作为一种重要的自动化设备,在工业生产中具有广泛的应用前景。
本文主要探讨了搬运机械手的仿真设计与制作过程,包括确定机械结构方案、建立数学模型、仿真程序设计、物理样机制作等方面。
通过这些环节的不断优化和改进,我们可以实现更高效、更稳定的搬运机械手设计和制作。
随着科技的不断进步,搬运机械手的应用领域越来越广泛,例如在物流、制造业、农业等领域都有应用。
未来,我们需要进一步研究和改进搬运机械手的设计和制作技术,提高其智能化、自主化和适应性等方面的性能,以更好地满足实际应用的需求。
机器人手臂自动控制的优化设计与仿真
机器人手臂在工业自动化、医疗卫生和家庭服务等领域中广泛应用,其自动控制是实现操作精准度、速度和稳定性的关键因素。
为了提高机器人手臂的自动控制效率,需要进行优化设计与仿真。
1. 动力学建模和控制策略
机器人手臂的动力学建模是自动控制的基础。
一般采用拉格朗日动力学方法,建立机器人手臂的动力学模型。
然后通过PID控制器、模糊控制器和神经网络控制器等不同的控制策略,实现机器人的运动轨迹控制和各种任务的自适应控制。
2. 电气控制系统
电气控制系统是机器人手臂的核心部分之一,包括电机、传感器、驱动电路和计算机控制器等。
合理设计电气控制系统可以提高机器人手臂的响应速度和精度。
3. 结构设计和材料选择
机器人手臂的结构设计和材料选择直接影响机器人手臂的承载能力、抗振性和运动精度。
对于轻质结构和高强度材料的选择可以使机器人手臂在运动过程中减小能量损耗和振动幅度,从而提高自动控制的精度和稳定性。
4. 仿真与实验验证
仿真技术是机器人手臂自动控制优化设计的重要手段。
可以采用MATLAB/Simulink和SolidWorks等软件进行仿真模拟,通过调试控制参数和运动轨迹,确定最优的控制策略和设计方案。
然后通过实验验证,观察机器人手臂的运动精度和稳定性,并对优化设计进行进一步改进和完善。
机械手轨迹规划及仿真机器人的轨迹是指机械手基本技术参数设计机械手基本技术参数设计主要是根据设计任务和功能要求,来确定以下主要性能参数:(1)机械手的使用:根据设计要求,设计好的机械手主要用于工件的运输和组装。
(2)机械手的负载能力:机械手的末端执行器支撑1kg。
末端执行器和主体以接口形式连接,以替换各种末端执行器。
(3)机械手的工作范围尺寸:水平工作范围322(mm),高度范围为470(mm)。
结构形式串联型负载能力1kg自由度4(3个回转1个移动)关节速度直线关节大臂回转关节小臂回转关节末端执行器回转关节各关节运动范围直线关节400mm大臂回转关节小臂回转关节末端执行器回转关节几何尺寸直线关节大臂回转关节小臂回转关节120mm机械手的总体结构图中显示了机械手的整体基本结构。
机械手主体由框架,线性部件,动臂和动臂接头,臂和动臂接头,端部执行器和端部执行器接头以及各种关节驱动装置等组成。
线性部件用于驱动安装板沿垂直于平面的方向移动,以完成机械手主体的提升运动。
臂的关节轴线与臂的关节轴线相互平行,以驱动大臂和小臂绕各自关节的轴线旋转,从而实现端部执行器在平面上的定位,端部执行器关节的旋转,可以完成工件或末端执行器在平面中的定向。
1.支架2.直线导轨3.电机14.滑块5.电机26.大臂7.电机38.小臂9.电机410.深沟球轴承111.深沟球轴承212.键13.轴承透盖14.内六角螺栓115.空心轴116.谐波117..内六角螺栓218.谐波219..内六角螺栓320.安装板3机械手运动学分析及仿真3.1机械手运动学分析机械手行作业任务的空间是任务空间,任务空间使用直角坐标系,并且机械手的关节运动在关节空间中。
因此,为了描述机械手的任务操作,有必要建立机械手各关节的连接坐标系,确定直角坐标系与关节位置之间的转换关系,并表达机械臂之间的运动关系。
机械手和周围环境。
机械手运动学是研究机械手的运动与其末端执行器的姿势之间的关系,包括两种类型的问题:(1)正运动学问题(DKP-DirectKinematic’Problem):已知机械手各关节的角度,确定末端执行器的位置和姿态:(2)逆运动学问题(IKP-InvereKinematic’Problem):已知机械手末端执行器的位置和姿态,求解达到此位姿的各关节角度。
摘要机器人的轨迹规划在机器人的控制中具有重要的地位。
良好的轨迹规划是机械手平稳、安全地避开障碍物,完成作业任务的保证。
本文根据机器人学的相关理论,以PUMA560为研究对象,建立的D-H坐标系,在关节空间内,运用推广的三次多项式插值法进行了过路径点以满足避障要求的机械手轨迹规划,并且采用MATLAB 软件对具体的规划实例进行了运动仿真,主要绘出了机械手各关节的角位移、角速度和角加速度曲线。
结果显示,每条曲线都是连续而光滑的,保证了各关节的运动平稳性,说明此次规划完全符合要求。
由此可以得出结论,过路径点的三次多项式插值法不仅能满足机械手速度和加速度的连续性要求,而且能通过主动选择路径点以满足避障要求。
这种轨迹规划方法可以很好解决机械臂在工作过程中的平稳性、实时性等问题,而且简单易行。
关键词:轨迹规划;多项式插值;避障;MA TLAB仿真AbstractRobot’s path planning plays an important role in controlling the robot.Good trajectory planning can guarantee manipulator avoid obstacles and finish the tasks smoothly and safely. Based on the theory of robot kinematics,this article use PUMA560 type mechanical arm to detablish D-H coordinate system and make trajectory planning by using extent cubic polynomial interpolation in joint space to meet the requirements of avoiding obstacles,and then use MA TLAB software example for the planning,and mainly draw angular displacement,velocity and angle acceleration curve of each joint.The result show that every curve is continuous and smooth so it can guarantee the stability of each joint movement.So this trajectory planning fully meet the requirements.So it comes to a conclusion that the cubic polynomial interpolation method can not only satisfy the requirements of continuitiy of the robot velocity and acceleration,but also can avoid obstacles by choosing path piont actively. This method of the path planning can make sure the manipulator working steadily in the course of its work well and can also solve the problem of the accuracy and the real-time characteristic,and it is easy to perform.Key words:Path planning;Polynomial interpolation; avoid obstacles;Matlab simulation目录第一章绪论 (1)§1.1研究背景和意义 (1)1.1.1 机器人轨迹规划的定义 (1)1.1.2 避障轨迹规划的意义 (1)1.1.3 轨迹规划研究的现状 (2)§1.2研究内容 (2)第二章机械手模型的建立 (4)§2.1 PUMA560机械手连杆坐标系的建立 (4)§2.2 PUMA560机械手运动方程的建立 (6)§2.3 PUMA560逆向运动方程的建立 (7)第三章机械手轨迹规划 (9)§3.1 轨迹规划的概述 (9)§3.2 轨迹规划的一般性问题 (10)§3.3 轨迹规划的具体方法 (10)第四章机械手轨迹规划仿真 (14)第五章总结 (18)结束语 (19)致谢 (20)参考文献 (21)附录 (22)第一章绪论§1.1 研究背景和意义1.1.1 机器人轨迹规划的定义工业机器人,或称机器人操作臂、机器人臂、机械手等。
一、 机械手轨迹规划[17]本文所提出的机械手轨迹规划方案为在关节空间内进行,其具体思路为: 1. 利用几何关系,寻找各个插值点的坐标,并求机械手手爪在各个插值点处的运动速度与加速度,确定机械手端部在各个插值点处的位姿;2. 利用机器人学的相关知识(主要是逆运动学分析与逆雅可比矩阵计算),将上面所求的机械手手爪的位姿、速度与加速度转化为各关节的位姿、速度与加速度;3. 将上面所求的各关节运动参数进行样条曲线拟合插值。
【注】设定插补周期为s t ,对点位运动设定其运动时间为0t ,对直线运动和圆弧运动设定其运动速度为v 。
(一) 点位运动1. 设定起始点()000Z Y X 与终止点()e e e Z Y X ;2. 分别对起始点与终止点进行逆运动学计算得0i θ及ie θ;)6,5,4,3,2,1(=i3. 分别对i θ进行线性插值000i i ie i t t θθθθ+-=。
)6,5,4,3,2,1(=i(二) 直线运动1. 设定起始点()000Z Y X 与终止点()e e e Z Y X ;2. 计算直线长度L ,机械手手爪在各点处的运动速度()T v ω,插补步长d ,插补总步数N 及插补运动中各坐标轴的增量X ∆、Y ∆和Z ∆:①202020)()()(Z Z Y Y X X L e e e -+-+-=;②()z y x e e ev v v L Z Z LY Y L X X v v =⎪⎭⎫ ⎝⎛---=000 ,故()()000z y x v v v v =ω; ③s vt d =;④⎥⎦⎤⎢⎣⎡+=1d L N ;⑤N X X X e 0-=∆、N Y Y Y e 0-=∆和NZ Z Z e 0-=∆。
3. 由此可以求得各插值点的坐标值:X X X i i ∆+=+1;Y Y Y i i ∆+=+1及Z Z Z i i ∆+=+1。
4. 分别对各插值点进行逆运动学计算,并求其对应的逆雅可比矩阵,得()ijij ijθθθ。
圆柱坐标型机械手工作站数字化设计与仿真简介圆柱坐标型机械手是一种广泛用于工业生产线的自动化装置,具有高精度、高速度、高可靠性等优点。
数字化设计与仿真技术能够在设计阶段对机械手进行全面的分析和测试,提高设计效率和质量。
设计过程步骤一:建立CAD模型使用CAD软件,根据机械手的结构设计参数,建立机械手的三维模型。
在建立模型时,需要考虑机械手的各个关节的运动范围和限制条件,确保模型的合理性和可行性。
步骤二:定义运动学模型通过运动学分析,确定机械手各个关节的运动学参数和运动学约束。
根据运动学模型,可以计算机械手在给定坐标系下的位置和姿态。
步骤三:设计控制系统根据机械手的运动学模型和性能要求,设计机械手的控制系统。
控制系统通常包括传感器、执行器、控制算法等组成部分。
传感器用于实时监测机械手的位置和姿态,执行器用于控制机械手的运动。
步骤四:仿真分析利用仿真软件,对设计的机械手进行各种工况仿真分析。
可以模拟机械手的运动轨迹、受力情况、工作效率等,评估设计的合理性和性能是否满足要求。
在仿真过程中,可以通过修改参数和改进设计来优化机械手的性能。
步骤五:优化设计根据仿真分析的结果,对机械手的设计进行优化。
可以调整关节的尺寸、改变传动方式、优化控制算法等,以达到设计要求和性能指标。
基于数字化设计与仿真的优势数字化设计与仿真技术在机械手的设计过程中具有许多优势:•提高设计效率:数字化设计与仿真软件可以对机械手进行全面的分析和测试,避免了实物样机的制作和试验,节省了大量的时间和资源。
•减少设计错误:通过仿真分析,可以发现设计中的问题和不足之处,并进行及时的修改和改进,降低了设计错误的出现。
•提高设计质量:数字化设计与仿真技术能够预测机械手在实际工作中的性能,对设计进行优化,提高设计的质量和可靠性。
•降低成本:数字化设计与仿真技术可以在设计阶段发现和解决问题,减少了设计修改的次数和成本,提高了设计的效率和经济性。
•方便后续工作:数字化设计与仿真软件可以输出设计文档、图纸和模型数据等,方便后续的工艺规划、制造和维护工作。