机械手时间最优轨迹规划方法研究
- 格式:pdf
- 大小:231.90 KB
- 文档页数:5
机械手臂轨迹规划算法及应用研究近年来,随着工业自动化的不断发展,机械手臂在工业领域中的应用越来越广泛。
而机械手臂的运动规划是其在工作中的关键环节。
本文将对机械手臂轨迹规划算法及其应用进行研究。
一、机械手臂轨迹规划简介机械手臂的轨迹规划是指确定机械手臂的运动轨迹,使其在特定的环境下完成预定的任务。
轨迹规划算法主要包括路径规划和速度规划两个方面。
路径规划是指确定机械手臂运动的路径,而速度规划是指确定机械手臂在规定路径上的运动速度。
合理的机械手臂轨迹规划算法可以使机械手臂高效完成工作任务,提高工作效率。
二、机械手臂轨迹规划算法1. 插值算法插值算法是机械手臂轨迹规划中常用的一种方法。
它通过将轨迹划分为一系列离散点,然后根据这些离散点之间的关系来确定机械手臂的轨迹。
常见的插值算法包括线性插值、二次插值和样条插值等。
这些算法可以根据机械手臂的运动特点和任务要求选择合适的插值方法。
2. 规划算法规划算法是指根据机械手臂的初始状态和目标状态,通过一系列计算和优化方法,确定机械手臂的最佳轨迹。
常见的规划算法包括遗传算法、模拟退火算法和遗传规划算法等。
这些算法可以通过对机械手臂的动力学模型和问题约束条件的考虑,得出最优的轨迹规划结果。
三、机械手臂轨迹规划的应用研究1. 工业领域机械手臂在工业领域中的应用非常广泛。
它可以在生产线上完成各种复杂的组装、搬运和焊接等工作任务。
机械手臂轨迹规划算法的应用可以帮助机械手臂准确、高效地完成各种任务,提高生产效率。
2. 医疗领域机械手臂在医疗领域中也有很大的应用潜力。
例如,机械手臂可以协助医生进行手术操作,减少手术风险,提高手术精准度。
机械手臂轨迹规划算法的应用可以使机械手臂在手术过程中实现精确的运动轨迹,确保手术的安全和成功。
3. 服务领域机械手臂还可以在服务领域中发挥重要作用。
例如,机械手臂可以在酒店或餐厅中完成餐盘的搬运和清洁等任务。
机械手臂轨迹规划算法的应用可以使机械手臂在狭小的空间内灵活地运动,完成各种服务任务,提供更好的服务体验。
机器人手臂轨迹规划算法的研究与应用机器人技术是近年来得到迅速发展的一项技术,然而机器人需要实现真正的智能化,需要深入研究已有科技的不足之处以及创新新的算法与技术。
机器人控制中的一个重要问题是在指定的轨迹上运动。
本文将主要讨论机器人手臂轨迹规划算法的研究与应用。
一、机器人手臂轨迹规划的背景及研究现状机器人轨迹规划是指在给定约束条件下,如运动方向、速度、加速度、路径长度、位置等,使机器人达到其规定位置和姿态的问题。
轨迹规划对于机器人的运动控制和定位至关重要,直接影响到其精度与速度。
轨迹规划与移动操作一直是机器人系统中的研究热点,不同领域的研究者们提出了各种各样的算法,以更好地解决不同应用场景下的机器人轨迹规划问题。
比如,在工业生产过程中,机器人需要能够自动地进行操作,以便提高生产效率和产品品质。
因此,机器人控制需要轨迹规划算法来使机器人有更加精确和更快的操作能力,可以在极短的时间内完成一系列操作。
二、机器人手臂轨迹规划的基本思想在机器人轨迹规划中,主要有三类基本控制策略:开环(基于预定义的轨迹)、闭环(基于传感器数据反馈)和半闭环。
开环控制适用于机器人进行非精细任务时,只需要遵循预定义的轨迹,而传感器反馈的闭环控制可以实现更精确的控制。
半闭环则是在某些特定场合下使用的一个混合策略。
机器人轨迹规划要从中识别出符合条件的轨迹,然后计算出时间参数,以便精确定位机器人末端。
其中,路径生成通常是通过指定散点轨迹来完成的,然后将这些散点连接起来,通过插值以获得细致的轨迹信息。
常见的轨迹规划算法有直线规划算法、贝塞尔规划算法、最小二乘方法等。
三、机器人手臂轨迹规划的应用机器人手臂轨迹规划算法广泛应用于多个领域,如科学实验、医疗、工业制造等。
举例来说,我们可以将机器人手臂轨迹规划应用于医疗器械的制造,如手术器械制造,在手术过程中,机器人可以更加精准、细致地进行操作,以减少手术时间和感染几率。
在制造领域,机器人手臂轨迹规划应用于板材料的自动下料和焊接,可以提高生产效率、大幅减少人力成本和生产时间、提高生产品质。

基于改进麻雀算法机械臂时间最优轨迹规划目录一、内容简述 (2)1.1 背景与意义 (3)1.2 国内外研究现状 (4)1.3 研究内容与方法 (5)二、麻雀算法概述 (6)2.1 麻雀算法原理 (7)2.2 麻雀算法改进方向 (9)三、机械臂运动学模型 (10)3.1 机械臂运动学方程 (10)3.2 机械臂运动约束条件 (11)四、时间最优轨迹规划问题描述 (12)4.1 时间最优性指标 (13)4.2 任务空间划分 (14)五、改进麻雀算法在时间最优轨迹规划中的应用 (15)5.1 基于改进麻雀算法的轨迹优化方法 (17)5.2 算法实现步骤 (18)5.3 实验验证与分析 (19)六、结论与展望 (20)6.1 研究成果总结 (21)6.2 研究不足与局限 (22)6.3 未来研究方向 (23)一、内容简述随着现代制造业的高速发展,机械臂在众多领域的应用越来越广泛,其精确、高效、灵活的运动控制需求也日益凸显。
传统的轨迹规划方法在面对复杂多变的工作环境或非线性摩擦力等干扰因素时,往往难以实现最优或稳定控制。
本文提出了一种基于改进麻雀算法的机械臂时间最优轨迹规划方法。
该方法首先分析了麻雀算法在轨迹规划中的应用基础,指出了其在搜索最优解时的潜在优势与局限性。
在此基础上,结合机械臂运动学约束和动力学模型,对基本麻雀算法进行了改进,引入了动态调整权重、精英个体保护机制以及基于函数值的变异操作等策略,以增强算法的全局搜索能力和稳定性。
为验证改进算法的有效性,本文设计了仿真实验,分别对不同工况下的机械臂轨迹跟踪性能进行了测试。
实验结果表明,相比传统方法,改进后的麻雀算法能够更快速地找到满足约束条件的最优轨迹,并且在面对复杂环境变化时表现出更好的鲁棒性。
通过与其他先进算法的对比分析,进一步证明了本文所提方法在机械臂时间最优轨迹规划中的优越性和可行性。
1.1 背景与意义随着科技的不断发展,机械臂在各个领域的应用越来越广泛,如制造业、医疗、航空航天等。
机械臂的运动轨迹规划与优化研究引言:机械臂作为一种重要的工业机器人,广泛应用于制造业、医疗、农业等领域。
机械臂的运动轨迹规划与优化是提高机械臂运动精度和效率的关键问题,也是当前研究的热点之一。
一、机械臂的运动轨迹规划方法1.1 轨迹生成方法机械臂的运动轨迹规划包括离线轨迹规划和在线轨迹规划。
离线轨迹规划在机械臂开始运动前生成一条完整轨迹,其中常用的方法有路径规划、插值法和优化方法等。
在线轨迹规划则是在机械臂运动过程中不断生成新的轨迹点,以应对实时性要求。
1.2 轨迹优化方法为了提高机械臂的运动效率和精度,轨迹优化是必不可少的一步。
常见的轨迹优化方法有速度规划、加速度规划和力矩规划等。
通过对运动过程中的速度、加速度和力矩等参数进行优化,可以使机械臂的运动更加平滑和高效。
二、机械臂运动轨迹规划与优化的挑战和难点2.1 多目标优化机械臂运动轨迹规划与优化往往涉及到多个目标,如运动时间最短、能耗最低、碰撞避免等。
这些目标之间往往存在着冲突和矛盾,如速度与力矩之间的平衡。
因此,如何有效地进行多目标优化是一个挑战。
2.2 动态环境下的规划在实际应用中,机械臂通常需要在动态环境中进行运动。
此时,不仅需要考虑各个关节的运动规划,还需要考虑与环境的交互和碰撞避免。
如何在动态环境中高效地生成运动轨迹是一个难点。
三、机械臂运动轨迹规划与优化的研究进展3.1 具体问题具体分析目前,机械臂运动轨迹规划与优化研究已经涉及到不同的应用领域。
例如,针对医疗领域中手术机器人的运动规划问题,研究人员提出了针对手术刀具的运动规划方法,以实现更高精度的手术指导。
3.2 智能算法的应用随着人工智能技术的不断发展,智能算法在机械臂运动轨迹规划与优化中得到了广泛的应用。
遗传算法、模拟退火算法和粒子群算法等智能算法可以有效解决多目标优化问题,提高机械臂的运动效率。
四、机械臂运动轨迹规划与优化的发展前景4.1 自适应机械臂研究人员正在探索机械臂运动轨迹规划与优化的自适应方法,使机械臂能够根据不同任务和环境自动调整运动轨迹,提高适应性。
机械手臂的轨迹规划与控制策略研究引言机械手臂是一种重要的工业机器人,广泛应用于生产制造、物流搬运、医疗服务等领域。
在机械手臂的操作过程中,轨迹规划和控制策略起着至关重要的作用。
本文将对机械手臂的轨迹规划和控制策略进行研究和分析,探讨其应用和发展前景。
一、机械手臂的轨迹规划1.机械手臂轨迹规划的重要性机械手臂的轨迹规划是指确定机械手臂在操作过程中的运动路径,包括位置、速度和加速度等方面的规划。
合理的轨迹规划可以确保机械手臂的稳定性、高效性和安全性,提高工作精度和效率。
2.常用的机械手臂轨迹规划方法目前,常用的机械手臂轨迹规划方法主要包括插补法和优化法。
插补法是将机械手臂的运动轨迹分段线性插补,常见的插补方法有线性插值法、圆弧插值法和样条插值法。
线性插值法简单直观,但对于复杂轨迹有一定的局限性;圆弧插值法适用于弯曲轨迹的规划,但对于非光滑曲线的插补效果较差;样条插值法能够更好地平滑轨迹,但计算复杂度高。
优化法是通过数学建模和优化算法求解最佳轨迹规划问题。
其中,最优控制和遗传算法是常用的优化方法。
最优控制方法通过最小化或最大化性能指标,寻找最佳控制信号,使机械手臂的运动轨迹最优。
遗传算法则通过模拟生物进化的过程,对机械手臂的轨迹进行优化。
3.机械手臂轨迹规划中存在的挑战机械手臂轨迹规划中存在着多样性和复杂性的挑战。
首先,机械手臂所处的工作环境多种多样,规划的轨迹需要适应不同的工作空间和约束条件。
其次,机械手臂的运动是非线性和多自由度的,轨迹规划需要克服非线性和高维度的问题。
此外,机械手臂的轨迹规划需要在保持稳定和安全的前提下,同时满足高效和灵活的要求。
二、机械手臂的控制策略1.机械手臂控制的基本概念机械手臂的控制策略是指通过对机械手臂的控制信号进行调节和优化,实现对机械手臂运动的准确控制。
机械手臂控制策略主要包括位置控制、速度控制和力控制等。
位置控制是指通过控制机械手臂的位置信号,使机械手臂在指定的目标位置与期望轨迹上运动。
机械手臂运动轨迹规划与控制算法优化一、引言机械手臂是一种非常重要的自动化装置,广泛应用于工业生产线、医疗机器人、军事领域等众多领域。
机械手臂的运动轨迹规划与控制算法是机械手臂能否高效运行的关键,也是对机械手臂性能评估的重要指标。
本文将探讨机械手臂运动轨迹规划与控制算法的优化方法。
二、机械手臂的运动轨迹规划方法机械手臂的运动轨迹规划可以分为离线规划和在线规划两种。
离线规划是在运动前预先确定机械手臂的轨迹,在实际运动中按照预设的轨迹进行操作。
在线规划则是在实际运动中根据实时的环境变化和目标要求进行规划,实时调整机械手臂的轨迹。
1. 离线规划方法离线规划方法常用的有插补法、优化法和搜索相位法。
插补法是利用数学插值方法,根据起点和终点的位置以及限制条件,通过逐点插值计算出机械手臂的轨迹。
这种方法简单直观,但是不能应对复杂环境和多关节机械手臂的规划问题。
优化法是通过优化目标函数来确定机械手臂的轨迹。
常见的优化方法有遗传算法、粒子群算法和模拟退火算法。
这些方法能够综合考虑多种因素,得到较为优化的轨迹,但是计算量大,计算时间长。
搜索相位法是将规划问题转化为搜索问题,根据启发式搜索算法进行轨迹规划。
例如A*算法、D*算法等。
这些算法根据启发式函数找到机械手臂的最佳路径,但是对搜索算法的选择和启发函数的设计有一定要求。
2. 在线规划方法在线规划方法主要包括反馈控制法和避障规划法。
反馈控制法是根据机械手臂当前的状态和目标位置,通过控制算法实时调整机械手臂的轨迹。
这种方法适用于环境变化较小的情况,但是对控制算法的设计要求较高。
避障规划法是在机械手臂移动过程中,通过传感器检测障碍物,并根据避障算法调整机械手臂的轨迹,避开障碍物。
这种方法能够应对复杂环境和突发事件,但是对传感器的选择和算法的设计有一定要求。
三、机械手臂控制算法的优化方法1. 优化目标函数机械手臂的控制算法的核心是目标函数,通过优化目标函数可以得到更好的控制效果。
机械臂运动轨迹规划与优化研究引言:机械臂已广泛应用于工业生产、医疗手术、服务机器人等领域。
机械臂的运动轨迹规划与优化是提高机械臂运动效率、精确度和安全性的关键研究领域。
本文将围绕机械臂运动轨迹规划与优化展开讨论。
一、机械臂运动轨迹规划的重要性机械臂运动轨迹规划是机械臂运动控制的核心环节,合理的轨迹规划可以使机械臂在复杂环境下实现高效、安全的运动。
通过规划合理的运动轨迹,机械臂可以避开障碍物,减少能耗,提高运动速度和精确度。
二、机械臂运动轨迹规划的方法1. 笛卡尔空间规划笛卡尔空间规划是最简单直观的机械臂轨迹规划方法,通过规定机械臂末端的位置和姿态来确定机械臂的运动轨迹。
然而,笛卡尔空间规划无法保证机械臂避开障碍物,且运动路径不够灵活。
2. 关节空间规划关节空间规划是通过控制机械臂关节的转动角度来确定运动轨迹。
该方法具有较高的灵活性,但需要对机械臂关节的运动范围和约束条件进行精确建模。
3. 混合空间规划混合空间规划结合了笛卡尔空间和关节空间规划的优点,既考虑了机械臂末端的位置和姿态,又考虑了关节的运动约束。
该方法能够更好地规划机械臂的运动轨迹,提高运动效率和精确度。
三、机械臂运动轨迹优化的方法1. 最短路径规划最短路径规划是优化机械臂运动轨迹的常用方法之一。
该方法通过寻找距离最短的路径,使机械臂在有限时间内快速到达目标位置。
最短路径规划可以利用图论算法如Dijkstra算法和A*算法来求解。
2. 平滑轨迹生成平滑轨迹生成可以使机械臂运动过程更加连续平滑,避免不必要的抖动和震荡。
常用的平滑轨迹生成方法有三次样条插值和贝塞尔曲线拟合等。
3. 动力学优化动力学优化是针对机械臂运动中的力耗、振动等问题进行优化的方法。
通过建立动力学模型,可以优化机械臂的控制策略,减小能量消耗,提高运动稳定性。
四、机械臂运动轨迹规划与优化的挑战1. 复杂环境机械臂运动轨迹规划与优化在复杂环境下会面临更多的挑战,例如多个障碍物、不确定的环境变化等。
基于可达性分析的机器人时间最优轨迹规划方法的研究发布时间:2021-06-15T07:20:37.915Z 来源:《中国科技人才》2021年第9期作者:赵辉[导读] 随着工业自动化的不断发展,工业环境日趋复杂,生产需求快速多变,对工业机器人运动性能的要求越来越高,机器人要更快更准更稳定,因此需要对机器人的轨迹规划进行更加深入的研究。
美的集团(上海)有限公司上海 201702摘要:工业机器人高速高精度运动对于提高生产制造效率有重要作用,因此时间最优轨迹规划成为研究热点之一。
本文讨论了目前热门的几种时间最优轨迹规划方法。
针对可达性分析的规划方法,首先介绍算法基本原理,给出单步运动计算流程,在此基础上进行扩展,推广到多步连续运动。
针对几种运动形式与约束条件,计算出时间最优轨迹,并对轨迹进行分析。
测试结果表明,该方法具有计算量小、无奇异点、稳定性高等优点,适合做实时控制。
关键词:轨迹规划,时间最优,力矩约束,动力学计算,多步连续运动一、前言随着工业自动化的不断发展,工业环境日趋复杂,生产需求快速多变,对工业机器人运动性能的要求越来越高,机器人要更快更准更稳定,因此需要对机器人的轨迹规划进行更加深入的研究。
传统机器人运动轨迹主要是S型和T型轨迹,但S型和T型轨迹采用固定运动速度和加速度,并不能发挥电机的全部性能。
对于直角坐标机器人和机床来说,此轨迹是时间最优的,但对于串联机器人来说,此轨迹并非时间最优。
为了使机器人以最大速度运动,缩短运动时间,需要研究电机性能工作在最大值临界状态下的运动,这种方法称为时间最优轨迹规划方法。
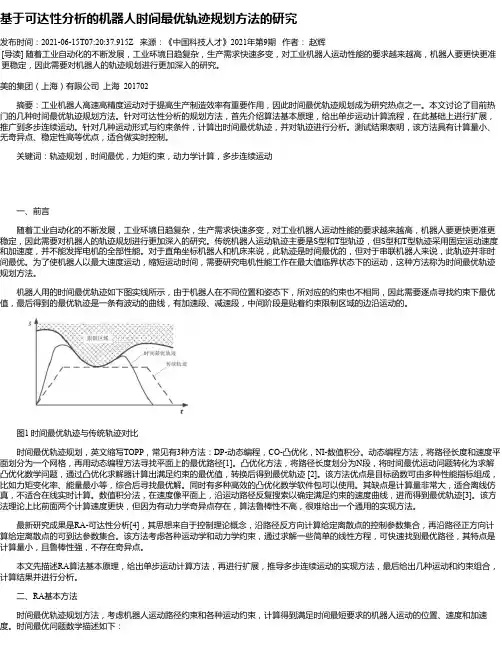
机器人用的时间最优轨迹如下图实线所示,由于机器人在不同位置和姿态下,所对应的约束也不相同,因此需要逐点寻找约束下最优值,最后得到的最优轨迹是一条有波动的曲线,有加速段、减速段,中间阶段是贴着约束限制区域的边沿运动的。
图1 时间最优轨迹与传统轨迹对比时间最优轨迹规划,英文缩写TOPP,常见有3种方法:DP-动态编程,CO-凸优化,NI-数值积分。
工业机器人的最优时间与最优能量轨迹规划工业机器人是现代工业生产中不可或缺的重要设备,它能够自动完成各种复杂的操作任务,提高生产效率,并减少劳动力成本。
而在工业机器人的运动过程中,时间与能量的优化规划是非常关键的,可以进一步提高机器人的运行效率,降低能耗成本,提升工业生产的整体竞争力。
对于工业机器人的最优时间规划,主要考虑的是从一个起始位置到目标位置完成任务所需的最短时间。
这需要综合考虑机器人的速度、路径规划、动态避障等因素。
首先,机器人的速度应该根据工作任务的要求进行合理设置。
如果任务要求机器人需要快速完成,那么可以提高机器人的速度。
其次,路径规划也是时间规划的重要一环。
通过精确的路径规划,在不同的工作区域之间能够减少不必要的移动距离,从而节省时间。
最后,动态避障是确保机器人在运动过程中能够及时避开障碍物,避免碰撞,并保证机器人的安全性。
对于工业机器人的最优能量规划,主要考虑的是在完成任务过程中消耗的能量最少。
这需要综合考虑机器人的工作负荷、运动过程中的摩擦损耗、控制系统的效率等因素。
首先,机器人的工作负荷应该在可控范围内。
如果工作负荷过大,会导致机器人的能耗增加。
其次,通过优化运动轨迹,减少机器人在运动过程中的摩擦损耗。
例如,通过减小机器人的加速度和减速度,合理设置机器人在转弯处的半径等措施,可以降低机器人的能量消耗。
最后,控制系统的效率也是能量规划的重要一环。
采用高效的控制算法和控制器,可以进一步减少能耗。
综上所述,工业机器人的最优时间与最优能量轨迹规划是提高工业生产效率和降低能耗成本的重要手段。
通过合理的速度设置、路径规划、动态避障等措施,可以使机器人在最短的时间内完成任务。
同时,通过适当的工作负荷、运动轨迹优化和高效的控制系统,可以降低机器人的能耗。
这些优化规划措施将帮助企业在工业生产中取得更高的效益,提高其竞争力。
工业机器人是现代工业生产中不可或缺的重要设备,它可以在无人操作的情况下完成各种复杂的操作任务,提高生产效率,并减少人力成本。
机械手臂运动规划与轨迹控制技术研究一、引言机械手臂作为一种自动化设备,在工业生产以及其他领域中起着重要作用。
机械手臂的运动规划与轨迹控制是实现机械手臂高效运作的基础。
本文将对机械手臂运动规划与轨迹控制技术进行研究,以期提高机械手臂的运动精度和效率。
二、运动规划基础机械手臂运动规划是指根据任务需求,对机械手臂的运动轨迹和动作进行合理的规划和安排。
运动规划的关键是确定机械手臂的关节角度,以实现特定的工作任务。
运动规划可分为两种基本方法,即离线规划和在线规划。
1. 离线规划离线规划是将机械手臂的工作场景建模,并通过计算机仿真软件进行运动轨迹的规划和优化。
其中,常用的离线规划方法有典型轨迹法、关节空间法和操作空间法。
典型轨迹法通过建模并运用数学方法,实现离线规划。
关节空间法是直接对机械手臂的关节角度进行规划,而不考虑机械手臂的末端位姿。
操作空间法则是基于机械手臂末端位姿进行规划,以实现特定的工作需求。
2. 在线规划在线规划是指在机械手臂实际运行时,实时根据工作场景和环境信息进行运动规划。
在线规划通常需要使用传感器获取实时数据,以及路径规划算法实现动作的规划。
其中,最常见的在线规划方法为局部规划和全局规划。
局部规划在短时间内进行规划,并结合机械手臂的当前状态实施相应动作。
全局规划则是基于整个任务的目标和约束条件,对机械手臂进行长时间的轨迹规划。
三、轨迹控制技术轨迹控制技术是指根据规划的运动轨迹,控制机械手臂实现准确的运动控制。
常用的轨迹控制技术包括PID控制、模型预测控制和自适应控制。
1. PID控制PID控制是一种经典的反馈控制方法,通过比较实际位置和期望位置的差别,计算出控制指令,从而实现位置控制。
在机械手臂运动中,PID控制可用于关节空间和操作空间的位置控制,具有简单、可靠、实时性好的特点。
然而,PID控制对于非线性和不确定性较强的机械手臂,其控制精度和稳定性有一定局限性。
2. 模型预测控制模型预测控制是一种基于数学模型的控制方法,通过建立机械手臂的动态模型,并基于当前状态预测未来一段时间的轨迹,以达到控制目标。
《工业机器人轨迹规划算法的研究与实现》一、引言随着工业自动化技术的快速发展,工业机器人已成为现代制造业不可或缺的一部分。
轨迹规划作为机器人运动控制的核心技术之一,对于提高机器人的工作效率、精度和稳定性具有重要意义。
本文将针对工业机器人轨迹规划算法进行研究与实现,旨在为工业机器人的应用提供理论支持和实用方法。
二、工业机器人轨迹规划概述工业机器人轨迹规划是指根据机器人的工作任务和要求,制定出一条从起始位置到目标位置的合理路径。
该路径应满足机器人的运动学和动力学约束,同时尽可能提高工作效率和精度。
轨迹规划算法是机器人运动控制的核心,其优劣直接影响到机器人的性能表现。
三、常见的工业机器人轨迹规划算法1. 直线插补法:该方法将目标位置与起始位置之间的路径近似为直线,通过计算直线上的离散点来规划机器人的运动轨迹。
该方法简单易行,但精度较低。
2. 圆弧插补法:该方法利用圆弧来逼近目标位置与起始位置之间的路径,提高了轨迹的平滑性和精度。
但该方法对机器人的运动学约束考虑不足,可能导致实际运动中产生较大的误差。
3. 优化算法:包括遗传算法、蚁群算法、粒子群算法等,通过寻找最优解来规划机器人的运动轨迹。
这些算法可以充分考虑机器人的运动学和动力学约束,得到较为理想的轨迹。
但计算量大,实现难度较高。
四、本研究采用的轨迹规划算法本研究采用一种基于遗传算法的轨迹规划方法。
该方法首先建立机器人的运动学模型和动力学模型,然后根据工作任务和要求,设定合理的评价函数。
通过遗传算法在解空间中搜索最优解,得到机器人的最佳运动轨迹。
该方法可以充分考虑机器人的运动学和动力学约束,提高轨迹的精度和平滑性。
五、算法实现1. 建立机器人运动学模型和动力学模型:根据机器人的结构和工作环境,建立精确的运动学模型和动力学模型。
2. 设定评价函数:根据工作任务和要求,设定合理的评价函数,包括路径长度、运动时间、能量消耗等指标。
3. 遗传算法搜索最优解:采用遗传算法在解空间中搜索最优解,得到机器人的最佳运动轨迹。
机器人运动控制中的轨迹优化方法研究随着科技的进步和人工智能的发展,机器人越来越普及,成为了生产和生活中不可或缺的存在。
而机器人在执行任务时,需要遵循一定的轨迹,因此轨迹优化就成为了机器人运动控制的一个重要研究领域。
本文将会介绍目前机器人运动控制中常见的轨迹优化方法及其研究现状。
一、背景介绍在机器人运动控制中,轨迹优化指的是通过对机器人运动轨迹的调整和优化,使机器人的运动更加精准、快速、安全和高效。
轨迹优化是机器人控制中的一个难点问题,它需要研究者在掌握机器人运动学、动力学等基础理论的基础上,结合实际应用需求,设计出符合要求的轨迹规划方案,并通过算法和控制方法来实现。
二、常见的轨迹优化方法1. 基于最优控制理论的轨迹优化最优控制理论是研究如何使系统在满足规定约束条件下,使某一性能指标最优的一种理论。
它利用微积分、动态规划等数学方法,对系统运动轨迹进行分析和求解。
在机器人运动控制中,最优控制理论常常被应用于轨迹优化问题中。
通过构建系统的运动学模型和性能指标,设计合适的控制方法,可以实现机器人轨迹的优化和控制。
2. 基于模型预测控制的轨迹优化模型预测控制是一种通过对未来时间内系统的状态进行预测,然后制定控制策略的一种方法。
在机器人轨迹优化中,模型预测控制可以通过对机器人运动状态进行实时跟踪和控制,来调整轨迹的实际执行情况,从而达到优化轨迹的目的。
模型预测控制的优点在于它可以在不需要对整个系统进行完全建模的情况下,通过非线性优化算法等方法,直接对机器人运动轨迹进行优化。
3. 基于遗传算法的轨迹优化遗传算法是一种通过模拟生物进化过程来搜索最优解的一种算法。
在机器人轨迹优化中,遗传算法可以通过对轨迹参数进行优化和搜索,来寻找最优的轨迹规划方案。
遗传算法的优点在于它可以搜索到全局最优解,具有广泛的适用性和强大的搜索能力。
三、研究现状随着机器人技术的发展,轨迹优化已经成为机器人运动控制中的一个重要研究领域。
目前,已经有很多研究者在轨迹优化方面进行了深入的研究和实践。
工业机器人时间最优轨迹规划仿真研究1. 引言1.1 研究背景工业机器人在现代生产中扮演着越来越重要的角色,其高效、精准的运动控制能力使得生产线更加自动化和灵活化。
而工业机器人在执行任务时需要遵循一定的轨迹规划,以确保其运动路径具有最佳性能,如快速、平稳、节省能源等。
时间最优轨迹规划是工业机器人领域的热点问题之一,通过寻找机器人在规定时间内能够完成任务的最佳运动路径,可以提高生产效率,降低成本。
由于受制约于机器人本身的动力学特性、环境约束等因素,时间最优轨迹规划并非是一项简单的任务。
对工业机器人时间最优轨迹规划进行研究具有十分重要的意义。
通过深入研究和探索,可以为工业机器人的运动控制提供更科学、更高效的方法,提升生产效率,降低生产成本,提高产品质量。
随着人工智能、物联网等新技术的不断发展和应用,使得工业机器人的智能化和自适应性也呈现出新的发展方向。
借助于仿真技术对工业机器人的时间最优轨迹规划进行研究,将为工业机器人的智能化发展提供有力的支持和保障。
1.2 研究意义工业机器人在现代生产制造中扮演着越来越重要的角色,其高效、精确的运动能力为企业的生产效率和产品质量提供了有力支持。
而工业机器人的时间最优轨迹规划则是保证其运动效率和稳定性的重要技术之一。
时间最优轨迹规划不仅可以使工业机器人在执行任务过程中更加高效地移动,减少能源消耗,还可以提高机器人的工作精度和生产效率,从而为生产制造企业节约成本,提高竞争力。
时间最优轨迹规划还可以减少机器人在运动过程中的损耗,延长其使用寿命,降低维护成本,为企业创造更大的经济效益。
研究工业机器人时间最优轨迹规划具有重要的理论价值和实际意义。
通过深入探讨和研究,可以不断提升工业机器人的运动性能和智能化水平,推动工业机器人技术的发展和应用,促进现代制造业的转型升级,为实现智能制造和工业4.0提供强有力的支持。
2. 正文2.1 工业机器人轨迹规划概述工业机器人轨迹规划是指为工业机器人制定最佳路径以实现任务目标的过程。
工业机器人的最优时间与最优能量轨迹规划一、本文概述Overview of this article随着科技的飞速发展和工业自动化的不断推进,工业机器人已成为现代制造业中不可或缺的重要工具。
其中,工业机器人的轨迹规划问题成为了研究的关键点之一。
轨迹规划不仅决定了机器人的运动路径,更直接关系到机器人的工作效率、能源消耗以及使用寿命。
因此,如何实现工业机器人的最优时间与最优能量轨迹规划,成为了当前研究的热点和难点。
With the rapid development of technology and the continuous advancement of industrial automation, industrial robots have become an indispensable and important tool in modern manufacturing. Among them, the trajectory planning problem of industrial robots has become one of the key points of research. Trajectory planning not only determines the motion path of a robot, but also directly affects its work efficiency, energy consumption, and service life. Therefore, how to achieve optimal time and energy trajectory planning for industrialrobots has become a hot and difficult research topic.本文旨在深入探讨工业机器人的最优时间与最优能量轨迹规划问题,分析现有方法的优缺点,并提出一种更加高效、节能的轨迹规划方法。
机械手运动轨迹规划与控制技术研究机械手是一种可编程、自动化的设备,广泛应用于工业生产线上。
机械手的核心功能是完成特定任务,例如物料搬运、装配等。
为了使机械手能够高效、准确地完成这些任务,运动轨迹规划与控制技术显得尤为重要。
一、机械手运动轨迹规划技术机械手的运动轨迹规划是指根据机械手的起始位置、目标位置、物体识别等相关信息,计算出机械手在运动过程中的合理轨迹。
其中最常用的方法是利用数学模型和算法来推导出机械手的轨迹。
1. 数学模型机械手的轨迹规划可以基于运动学和动力学模型进行计算。
运动学模型主要描述机械手末端执行器的运动特性,包括位置、速度、加速度等。
而动力学模型则进一步考虑了力和力矩等因素,使轨迹规划更加准确。
2. 算法常用的机械手轨迹规划算法有直线插补算法、圆弧插补算法和样条插值算法等。
直线插补算法适用于直线运动,通过线段的起始点和终点来计算机械手的轨迹。
圆弧插补算法则适用于圆弧路径,通过圆弧的起始点、结束点和半径来计算机械手的轨迹。
而样条插值算法可以生成光滑的曲线路径,更加符合实际工程应用。
二、机械手运动轨迹控制技术机械手运动轨迹控制技术是指通过控制机械手的执行器,实现机械手按照规划好的轨迹进行运动。
常见的机械手运动轨迹控制技术包括PID控制、自适应控制和模糊控制等。
1. PID控制PID控制是一种传统的控制方法,通过调节比例、积分和微分三个参数来控制机械手执行器的运动。
它的优点是简单易用、效果稳定,但在复杂环境下可能存在较大的误差。
2. 自适应控制自适应控制是一种根据机械手的实际情况,动态调整控制参数的方法。
它能够实时地监测机械手的状态,根据反馈信息来调整执行器的运动,以提高运动精度和稳定性。
3. 模糊控制模糊控制是一种基于模糊逻辑的控制方法,通过将经验知识转化为模糊规则,实现对机械手的控制和决策。
模糊控制具有很强的适应性和鲁棒性,可以应对环境变化和不确定性等复杂情况。
三、机械手运动轨迹规划与控制技术的研究进展近年来,机械手运动轨迹规划与控制技术在工业自动化领域得到了广泛关注和研究。