工程力学A 参考习题之虚位移原理习题及解答
- 格式:doc
- 大小:505.50 KB
- 文档页数:4

第11章 虚位移原理——习题1~1711-1 图示平面机构,圆盘的半径为r ,可绕其中心轴转动,直杆BC 和BD 的长度为l 1 = 2r ,直杆AB 的长度为l 2 = 3r ,试建立图示位置圆盘的虚转角θδ与滑块C 的虚位移C r δ之间的关系。
(题11-1答案:)11-2 在图示平面机构中,O 1A = AB = r ,O 2C = 2r ,BD = 4r ,C 为杆BD 的中点,试建立图示位置杆O 1A 的虚转角1δθ与杆O 2C 的虚转角2δθ之间的关系。
(题11-2答案:)11-3 如图所示曲柄摇杆机构,已知OA = OB = l ,试建立图示位置两杆虚转角之间的关系。
(题11-3答案:)11-4 在图示平面机构中,半径为R = 2r 的四分之一细圆环BD ,其上套一套筒A ,套筒与可绕轴O 转动的直杆OA 铰接,OA 的长度为l = 3r ,试建立图示题11-1图题11-2图位置杆OA 的虚转角与点D 的虚位移之间的关系。
(题11-4答案:)11-5 在如图所示平面机构中,O 1A = O 3C = O 3D = AB = l ,在图示位置,CB = O 2B =l 332,试建立该位置A 、D 两点虚位移之间的关系。
(题11-5答案:)11-6 在图示平面机构中,ABD 为边长等于a 的正三角形平板,O 1B 、O 2D 的杆长也均为a 。
机构在图示位置时,杆OE 与水平线成60◦角,A 、D 、O 2在同一水平线上,O 1B 位于铅垂位置,且OA = a ,试求此瞬时刚体O 1B 与OE 的虚转角之间的关系。
题11-3图题11-4图题11-5图题11-6图(题11-6答案:)11-7 在图示平面四连杆机构中,在杆AB 上垂直地作用有三角形分布载荷,其最大集度为q ,在杆OA 的中点作用有水平向左的主动力F ,且F = ql ,若不计各构件自重和各接触处摩擦,为使系统在图示位置平衡,所需施加的作用于杆BC 上的主动力偶矩M 的值。


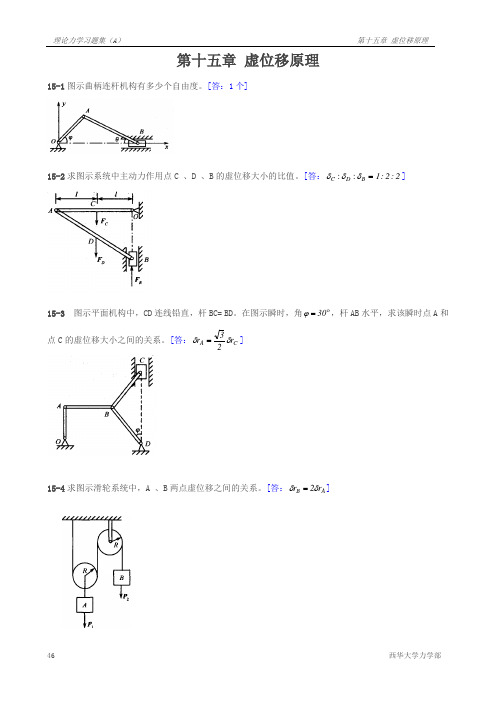
第十五章 虚位移原理15-1图示曲柄连杆机构有多少个自由度。
[答:1个]15-2求图示系统中主动力作用点C 、D 、B 的虚位移大小的比值。
[答:=B D C δδδ::2:2:1]15-3 图示平面机构中,CD 连线铅直,杆BC= BD 。
在图示瞬时,角 30=ϕ,杆AB 水平,求该瞬时点A 和点C 的虚位移大小之间的关系。
[答:C A r 23r δδ=]15-4求图示滑轮系统中,A 、B 两点虚位移之间的关系。
[答:A B r 2r δδ=]15-5重为P 、长为l 的均质杆AB 放置如图。
设各处光滑,在A 点处的水平力F 作用下保持平衡, 60=ϕ,今给A 点一向右的虚位移x δ,试由虚位移原理建立的虚功方程。
[答:0x F -63P=δδ]15-6 杆OA 和AB 各长l ,在A 点用铰链连接,在点O 和B 间连接一根刚度系数为 k 的铅直弹簧,弹簧的原长为0l 。
当在A 点作用铅垂力A F 时,机构处于图所示的平衡位置,且弹簧被拉伸。
如果不计各构件的重量和摩擦,用虚位移原理求机构处于平衡位置时的角度ϕ。
[答:4kl2kl F arcsinA +=ϕ]15-7 如图所示,两等长杆AB 和BC 在点B 用铰链连接。
在杆的点D 和点E 连接水平弹簧,弹簧的刚度系数为k ;从当距离AC a =时,弹簧的拉力等于零。
已知 AB=l , BD=b ,今在点C 作用水平力F 1使系统处于平衡。
若不计构件重量和摩擦,试用虚位移原理求距离AC 的值x 。
[答:21b l kFa x ⎪⎭⎫ ⎝⎛+=]15-8 在图示机构中,已知:力F ,l GC EG DE DC BC AC ======,弹簧的原长为l ,刚度系数为k 。
试用虚位移原理求机构平衡时,力F 与角θ的关系。
[答:()12sin kl 32F -=θ]15-9 平面机构在力F 1和F 2的作用下,在图所示的角度θ位置平衡。
已知1l BD OD ==,2l AD =,如果不计各构件重量和摩擦,试用虚位移原理求F 1 / F 2的比值。
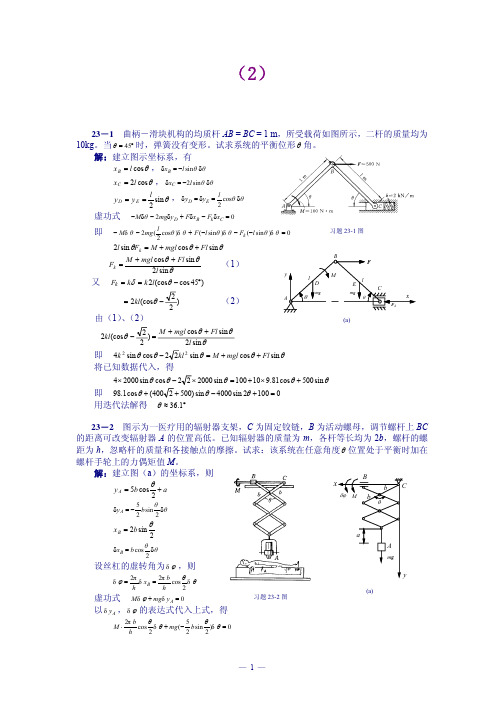
习 题4-1 如图4-19所示,在曲柄式压榨机的销钉B 上作用水平力F ,此力位于平面ABC 内,作用线平分∠ABC 。
设AB =BC ,∠ABC =θ2,各处摩擦及杆重不计,试求物体所受的压力。
图4-190δ)90cos(δδN =--︒=∑C B F s F s F W θ)90cos(δ)902cos(δθθ-︒=︒-C B s s θθsin δ2sin δC B s s = 虚位移原理0δ)90cos(δδN =--︒=∑C B F s F s F W θ 0δsin δN =-C B s F s F θθθθθtan 2)2sin(sin sin δδ2N F F s s F F C B ===4-2 如图4-20所示,在压缩机的手轮上作用一力偶,其矩为M 。
手轮轴的两端各有螺距同为h ,但方向相反的螺纹。
螺纹上各套有一个螺母A 和B ,这两个螺母分别与长为l 的杆相铰接,四杆形成棱形框,如图所示,此棱形框的点D 固定不动,而点C 连接在压缩机的水平压板上。
试求当棱形框的顶角等于2f 时,压缩机对被压物体的压力。
图4-20ϕϕcos δ)290cos(δC A s s =-︒ C A s s δsin δ2=ϕ而 θϕδπ2c o s δP s A =ϕθϕθϕtan δπsin δcos π22δPP s C ==虚位移原理0δδδN =-=∑C F s F M W θ 0tan δπδN =⨯-ϕθθPF M ϕcot πN PMF =4-3 试求图4-21所示各式滑轮在平衡时F 的值,摩擦力及绳索质量不计。
图4-21虚位移原理0δδδ=+-=∑A B F s G s F W(a) A B s s δ2δ= 2G F =(b) A B s s δ8δ= 8G F = (c) A B s s δ6δ= 6G F =(d) A B s s δ5δ= 5G F =4-4 四铰连杆组成如图4-22所示的棱形ABCD ,受力如图,试求平衡时θ应等于多少?图4-22θθcos δ)290cos(δC B s s =-︒ C B s s δsin δ2=θ 虚位移原理0δcos δ2δ=-=∑C B F s G s F W θ0sin δ2cos δ2=⨯-θθB B s G s Fθtan =GF4-5 在图4-23所示机构中,曲柄OA 上作用一力偶矩为M 的力偶,滑块D 上作用一水平力F ,机构尺寸如图。
虚位移原理习题及解答机构在图示位置平衡,不计各杆自重,求力F 1和F 2的关系解:设AB 杆的A 点为动点,OC 杆为动系,A 、C两点的虚位移如图,则:φδδcos A e r r =φδδδcos OAeeC l ar a r r ==由上述各式和虚功方程012=-C A r F r F δδ解出:机构在图示位置平衡,不计各杆自重,求力偶矩M 与F 之间的关系。
解:设OA 杆的虚位移为δφ,则A 、D 、B各点虚位移如图,图中δφδa r A =θδθδcos 2cos A B r r = θδθδcos 2sin D B r r = 0=+-D r F M δδφ θ2tan F M =已知:弹簧原长0.3m ,刚度系数k=5kN/m ,机构在图示位置平衡,不计各杆自重,求力偶矩M 的大小。
解:设CD 杆上D 点为动点,AB 杆为动系,它们的虚位移如图θδδtan e r r r =θδδδθcos 0.3AD e e rr ==由虚功方程 0=-r k r F M δδθ以及弹簧力)]cos 3.06.0(3.0[θ--=k F k可解出 θθθs i n c o s c o s14503-=M N.m已知:BC=AB=L ,BE=BD=b ,弹簧刚度为k ,当x=a 时,弹簧拉力为零,该系统在力F 作用下平衡,杆重不计,求平衡时x=?解:弹簧力如图,其中)(a x l bk F F k k -='=各力作用点横向坐标及其变分为θcos )(b l x D -= θδθδs i n )(b l x D --= θcos )(b l x E +=θδθδs i n )(b l x E +-=θcos 2l x C = θδθδs i n2l x C -= 代入虚功方程0=∑x F xδ0=+'-C E KD K x F x F x F δδδ 解得:22kb Fl a x += 已知:已知均质杆长,杆重皆为P ,滑块C 重P2,滑轨倾角为θ,求平衡时角φ为多大?φsin 2l x D = δφφδ.cos 2l x D = φcos 2l y D = δφφδ.sin 2l y D -=φsin 2lx E = δφφδ.cos 2l x E =φcos 23l y E = δφφδ.sin 23l y E -= 0=C x 0=C x δφcos 2l y C = δφφδ.sin 2l y C -=把它们代入虚功方程 0)(=+∑y F x F y xδδ得:0sin sin cos sin cos 21111=++++C E E D D y P y P x P y P x P θδθδθδθδθδ解得: θφc o t)(2t a n 211P P P +=15-15 用虚位移原理求图示桁架中杆3的内力。
虚位移原理习题及解答
机构在图示位置平衡,不计各杆自重,求力F 1和F 2的关系
解:设AB 杆的A 点为动点,OC 杆为动系,A 、C
两点的虚位移如图,则:φδδcos A e r r =
φδδδcos OA
e
e
C l a
r a r r ==
由上述各式和虚功方程
012=-C A r F r F δδ
解出:
机构在图示位置平衡,不计各杆自重,求力偶矩M 与F 之间的关系。
解:设OA 杆的虚位移为δφ,则A 、D 、B
各点虚位移如图,图中
δφδa r A =
θδθδcos 2cos A B r r = θδθδcos 2sin D B r r = 0=+-D r F M δδφ θ2tan F M =
已知:弹簧原长0.3m ,刚度系数k=5kN/m ,机构在图示位置平衡,不计各杆自重,求力偶矩M 的大小。
解:设CD 杆上D 点为动点,AB 杆为动系,它们
的虚位移如图
θδδtan e r r r =
θ
δδδθcos 0.3AD e e r
r ==
由虚功方程 0=-r k r F M δδθ
以及弹簧力
)]cos 3
.06.0(3.0[θ-
-=k F k
可解出 θ
θθs i n c o s c o s
14503-=M N.m
已知:BC=AB=L ,BE=BD=b ,弹簧刚度为k ,当x=a 时,弹簧拉力为零,该系统在力F 作用下平衡,杆重不计,求平衡时x=?
解:弹簧力如图,其中
)
(a x l b
k F F k k -='=
各力作用点横向坐标及其变分为
θ
cos )(b l x D -= θδθδs i n )(b l x D --= θ
cos )(b l x E +=
θδθδs i n )(b l x E +-=
θcos 2l x C = θδθδs i n
2l x C -= 代入虚功方程
0=∑x F x
δ
0=+'-C E K
D K x F x F x F δδδ 解得:
2
2
kb Fl a x += 已知:已知均质杆长,杆重皆为P ,滑块C 重P2,滑轨倾角为θ,求平衡时角φ
为多大?
φsin 2l x D = δφ
φδ.cos 2l x D = φcos 2l y D = δφ
φδ.sin 2l y D -=
φsin 2l
x E = δφ
φδ.cos 2l x E =
φcos 23
l y E = δφ
φδ.sin 23l y E -= 0=C x 0=C x δ
φcos 2l y C = δφφδ.sin 2l y C -=
把它们代入虚功方程 0)(=+∑y F x F y x
δδ得:
0sin sin cos sin cos 21111=++++C E E D D y P y P x P y P x P θδθδθδθδθδ
解得: θφc o t
)(2t a n 211
P P P +=
15-15 用虚位移原理求图示桁架中杆3的内力。
解:去掉3号杆,受力如图b 所示,则:
θδθδ2sin cos C B r r = θδδcos C D r r =
代入虚功方程
03=-B D r F r P δδ
解得3杆内力为:
P P
F ==
θcot 23
已知滑块上的水平力F ,不计滑块、铰链处的摩擦和滚子滚动摩阻力偶,滚子半径为R ,该系统在图示位置平衡;
求:施于滚子上的力偶矩M 和滚子与地面间的摩擦力Fs 。
解:设滚子只滚不滑,滚子及A 、B 两点的虚位移如图(a)
φδφδcos 2R r A =, φδδcos B A r r = 结合虚功方程:0=-B r F M δδφ
可解出:RF M 2=
再设滚子只滑不滚,各点的虚位移如图(b),图中B A C r r r δδδ== 由虚功方程 0=-B C s r F r F δδ
解得 F F S =
已知均质杆AB 重为P ,BC 和CE 两杆的重量不计,BC 杆上分布载荷的最在载荷集度为q ,A 、E 两处弹簧的刚度系数为k 1和k 2,AB=BC=L ,AH=BH ,CD=DE ,设系统在图示位置平衡:
求:E 处弹簧的伸长量∆和A 处弹簧的扭转角ϕ
解:E 处弹簧的恢复图片A 处弹簧的恢复力矩为
∆=1k F E ϕ2k M =
线性分布的合力作用位置和在小为
l CG 32= ql
F 21= 现设AB 杆发生虚位移,E 、C 、
G 各点虚位移如图(b),图中
E C r r δδ= C
G r r δδ31
=
由虚功方程:0=+E E G s r F r F δδ
可解出
16k ql -
=∆,负号表示E 处弹簧受压缩。
再设CE 杆不发生水平虚位移时,该系统的虚位移如图(c),
由虚功方程:0=-δφδM r P H 以及δϕ
δ2l
r H = 可得
22k Pl =
ϕ。