9水箱模型
- 格式:ppt
- 大小:903.00 KB
- 文档页数:40
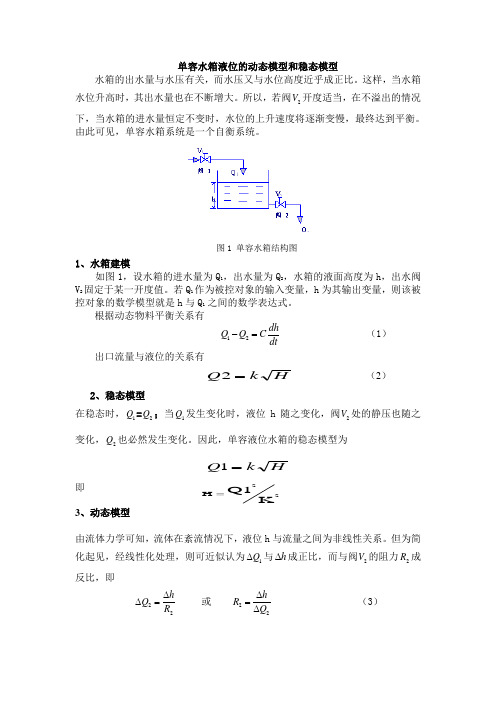
单容水箱液位的动态模型和稳态模型水箱的出水量与水压有关,而水压又与水位高度近乎成正比。
这样,当水箱水位升高时,其出水量也在不断增大。
所以,若阀2V 开度适当,在不溢出的情况下,当水箱的进水量恒定不变时,水位的上升速度将逐渐变慢,最终达到平衡。
由此可见,单容水箱系统是一个自衡系统。
图1 单容水箱结构图1、水箱建模如图1,设水箱的进水量为Q 1,出水量为Q 2,水箱的液面高度为h ,出水阀V 2固定于某一开度值。
若Q 1作为被控对象的输入变量,h 为其输出变量,则该被控对象的数学模型就是h 与Q 1 之间的数学表达式。
根据动态物料平衡关系有 12dh Q Q C dt-= (1) 出口流量与液位的关系有H kQ =2 (2)2、稳态模型在稳态时,1Q =2Q ;当1Q 发生变化时,液位h 随之变化,阀2V 处的静压也随之变化,2Q 也必然发生变化。
因此,单容液位水箱的稳态模型为 H kQ =1 即 K Q122H = 3、动态模型由流体力学可知,流体在紊流情况下,液位h 与流量之间为非线性关系。
但为简化起见,经线性化处理,则可近似认为1Q ∆与h ∆成正比,而与阀2V 的阻力2R 成反比,即22h Q R ∆∆= 或 22h R Q ∆=∆ (3)式中,2R 为阀2V 的阻力,称为液阻。
将式(3)代入式(2)可得221d h R C h R Q dt∆+∆=∆ (4) 在零初始条件下,对上式求拉氏变换,得动态模型:2012()()()11R H s K G s Q s R Cs Ts ===++ (5) 式中,T=R 2C 为水箱的时间常数(注意:阀V 2的开度大小会影响到水箱的时间常数),K=R 2为过程的放大倍数。
假令输入流量1()Q s =0/R s ,0R 为常量,则输出液位的高度为:000()(1)1/KR KR KR H s s Ts s s T==-++ (6) 即 10()(1)t T h t KR e -=- (7)当t →∞时,0()h KR ∞= 因而有 0()h K R ∞==输出稳态值阶跃输入 (8) 当t=T 时,则有100()(1)0.6320.632()h T KR e KR h -=-==∞ (9)式(7)表示一阶惯性环节的响应曲线是一单调上升的指数函数,如图2所示。

http://www.renminzhujiang.cnDOI:10 3969/j issn 1001 9235 2023 07 001第44卷第7期人民珠江 2023年7月 PEARLRIVER基金项目:基于人工智能技术的水电站库区气象水文保障系统研究(TS-2208714)收稿日期:2022-10-13作者简介:马靖航(1988—),男,工程师,从事大坝安全监测、水文监测、水电站生产管理等工作。
E-mail:12064151@ceic.com通信作者:吴磊(1981—),男,博士,教授,从事流域水土环境过程与跨介质调控研究。
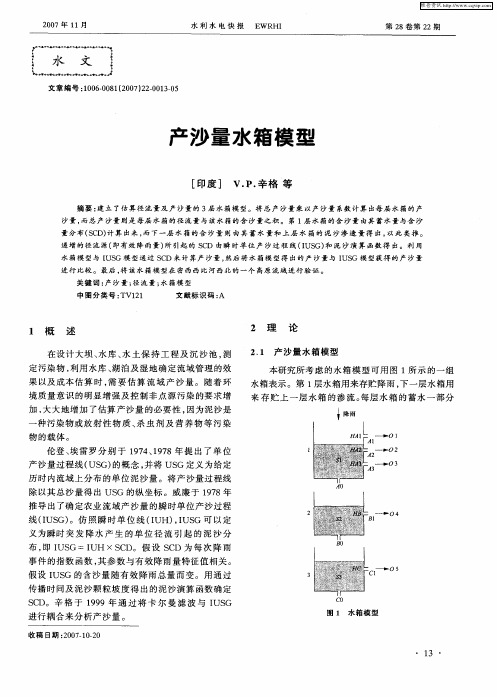
E-mail:lwu@nwsuaf.edu.cn马靖航,咸永财,何学平,等.新安江模型与水箱模型在马家沟水库洪水预报的适用性研究[J].人民珠江,2023,44(7):1-7,63.新安江模型与水箱模型在马家沟水库洪水预报的适用性研究马靖航1,咸永财1,何学平1,刘 明1,韩牧原1,杜佰林2,3,阮炳南2,3,许鎏佳2,3,吴 磊2,3(1.国能陕西水电有限公司,陕西 西安 710000;2.西北农林科技大学旱区农业水土工程教育部重点试验室,陕西 杨凌 712100;3.西北农林科技大学水利与建筑工程学院,陕西 杨凌 712100)摘要:洪水预报是重要的非工程防洪措施之一,是防洪指挥决策的主要依据。
为避免单一模型预报结果的不确定性,以城固县马家沟水库为对象,应用新安江模型和水箱模型分别模拟了2019—2021年流域日径流和次洪水过程,并结合遗传算法率定优化的模型参数比较了模拟结果与精度。
日模方面,水箱模型的模拟效果更优,洪量相对误差小于16%,洪峰相对误差小于4%,峰现时差小于1h,Nash Sutcliffe效率系数大于0.58,均达到了《水文情报预报规范》的评定精度要求,且对于水库大洪水的模拟效果也较为理想。
次模方面,2个模型的峰现时差表现相当,新安江模型的模拟效果更平滑,水箱模型的洪量和洪峰模拟更贴近实测流量过程。
龙源期刊网
水箱模型辨识及PID参数自整定技术研究
作者:卢岩涛王俊崴程晔
来源:《现代电子技术》2012年第23期
摘要:为了达到对液位控制模型进行实时模型参数辨识,并实时计算出较为理想的PID参数对水箱进行实时控制的目的,采用最小二乘算法改进法及基于Ziegler-Nichols整定法的改良公式,进行水箱液位控制实验。
得到对水箱液位进行实时控制的结果,其中超调量、控制时间均较为理想。
结果证明此方法合理可行,具有对变化模型进行实时辨识的特点,结合动态辨识与基于模型的PID自整定法对非常规模型进行控制。
关键词:水箱液位控制系统;参数辨识;PID自整定;非常规模型
中图分类号:TN911.7-34;TP273文献标识码:A文章编号:1004-373X(2012)23-0146-03。

实验报告(二)——水箱模型径流模拟实验目的:研究水箱模型参数参数变化时对模拟径流的影响;实验步骤:(1)将“水箱模型”文件夹放于“D:\Program Files\”目录下,打开文件夹,双击Project1.exe。
打开水箱模型各参数对话框,对话框中包含初始参数,点击径流模拟得到初始模拟径流资料,将其与实测径流比较观察差别情况,如下表:由上图知原始参数模拟后与原实测径流对比峰值过高,峰型较胖,需要调参使模拟、实测值拟合度提高!由于学习水文模型时,没有足够用心导致现在对各参数对径流过程的影响了解的不够清楚,我还是采用桌一调参的方法先研究各参数对径流过程的影响。
我首先改变了参数出流、下渗系数的值如下图:通过对模拟、实测径流过程的拟合度的观察,我发现减小出流或下渗的前三个参数时逢高变小了;拟合度显著增大!增大这一参数时峰值增大。
翻阅书籍才知道原来前三个参数代表水箱模型第一层水箱!在了解了出流、下渗系数对流量过程的影响后我开始调节第二个参数底水的大小,如下图:观察发现,减小底水后模拟流量峰前蜂后与实测更加吻合,峰值进一步变小,模拟流量过程线变得瘦高;进一步减小底水第一个参数结果使得模拟流量峰前降低,蜂后也有下降;说明底水主要是对峰前峰后产生影响进而改变流量过程!如下图:了解了底水、出流或下渗系数变化对流量过程的影响后,我开始固定这两参数,来研究孔高对径流过程的影响,如下图:由上图观察发现第二个孔高影响峰高;第一个孔高影响峰前和蜂后,增大孔高第一个参数蜂后进一步下降,模拟流量过程更加瘦高;最后固定前三个参数,研究K值对径流过程的影响,如下图:由上图,增大K值模拟流量峰高降低,过程线变得矮胖;减小K值峰高增高,过程线瘦高,且稍往前移;在对几个参数对径流过程影响了解过后,我又做了一些实验,来研究具体每个参数内部各参数对流量的影响如下列图:改变出流下渗前三个参数,也就是上层水箱的参数,使得模拟流量峰高增加而,而其他形状不变!!改变出流或下渗系数后三个值,如果是减小它们则模拟流量过程线变得更瘦尖,而其他形状不变;在上边一系列实验,获得了各参数对径流过程的影响之后,我便开始进行同参数两次流量过程的模拟了!首先需要改变所给模型中的原始值,即调换sheet1,sheet3位置模拟第二个径流,如此反复替换反复模拟知道再同一参数下两个径流模拟过程都能和实测过程拟合完好为止!如下图:减小出流或下渗系数第一个参数,改变低水值,使得模拟流量过程线蜂后前移;将第二个径流模拟相对吻合的参数再次用于模拟第一个实测径流过程,发现吻合还算精确;说明这一参数可以使得两个实测径流过程都和模拟径流过程都拟合良好符合要求:最终得使两个径流过程都拟合相对较好的参数如下图标:。

实验九DCS水箱液位控制系统实验目的1、了解单回路控制的特点和调节品质,掌握PID参数对控制性能的影响。
2、学会分析执行器风开风关特性的选择及调节器正反作用的确定。
3、初步掌握单回路控制系统的投运步骤以及单回路控制器参数调整方法。
实验设备A3000过程对象的下水箱V103,SUPCONDCS,支路系统1,支路系统2。
图9-1A3000过程控制系统示意图实验原理9-2单回路控制系统方框图图9-2为单回路控制系统方框图的一般形式,它是由被控对象、执行器、调节器和测量变送器组成一个单闭环控制系统。
系统的给定量是某一定值,要求系统的被控制量稳定至给定量。
由于这种系统结构简单,性能较好,调试方便等优点,故在工业生产中已被广泛应用。
控制器采用PID控制规律,常用的控制规律有比例(P)调节、比例积分(PI)调节、比例微分(PD)调节、比例积分微分(PID)调节。
调节器参数的整定一般有两种方法:一种是理论计算法,即根据广义对象的数学模型和性能要求,用根轨迹法或频率特性法来确定调节器的相关参数;另一种方法是工程实验法,通过对典型输入响应曲线所得到的特征量,然后查照经验表,求得调节器的相关参数。
工程实验整定法有临界振荡法、衰减振荡法。
(1)临界振荡法将Ti→∞,Td=0,调整δ至较大值,逐渐减小δ,直至出现等幅振荡如下图所示,记下δr(临界比例带),根据δr,Tα查表得δ,Ti,Td,见下表图9-2临界震荡过程表9-1临界比例度法控制器参数计算表临界比例度法的优点是应用简单方便,但此法有一定限制。
首先要产生允许受控变量能承受等幅振荡的波动,其次是受控对象应是二阶和二阶以上或具有纯滞后的一阶以上环节,否则在比例控制下,系统是不会出现等幅振荡的。
在求取等幅振荡曲线时,应特别注意控制阀出现开、关的极端状态。
(2)衰减振荡法将Ti→∞,Td=0,调δ使被控量达4:1或10:1如下图所示;对应δ,根据δ,T确定δ,Ti,Td,见下表图9-44:1衰减震荡曲线表9-2衰减曲线法控制器参数计算表实验流程介绍以第1套实验装置为例,在A3000高级过程控制实验系统中,下图所示为液位单回路控制系统。
完成水箱模型参数测定的实验方案
1.实验目的
测定水箱模型的参数(包括水箱的容积、出水口面积和出水口附近的压力)。
2.实验原理
水箱是一个封闭的容器,一般由一个进水口和一个出水口组成,通过调节进水流量和出水流量来控制水位。
可以利用流量计和压力传感器等装置来测定流量和压力,从而确定出水口的面积和附近的压力。
3.实验器材
(1)水箱模型
(2)流量计
(3)压力传感器
(4)液位计
(5)水泵
4.实验步骤
(1)将水箱模型放置在实验室的水槽中,并连接水泵、流量计、压力传感器和液位计等装置。
(2)控制水泵的进水流量,记录流量计的示数,并记录液位计测得的水位高度。
(3)通过调节出水口的流量,使水箱水位保持稳定,记录此时流量计和压力传感器的示数。
(4)调节水泵的流量,反复测量出水口的流量和附近的压力,直到测定数据足够稳定为止。
5.实验数据处理
(1)根据流量计的示数和液位计测得的水位高度,可以求得水箱的容积。
(2)根据出水口流量和附近压力的测定值,可以求得出水口的面积和附近的压力。
6.实验注意事项
(1)实验过程中需保持实验器材干净、整洁,防止杂物进入水箱。
(2)实验时需耐心、仔细地进行,测定到的数据要求稳定、准确。
(3)水箱中的水应该被定期更换,避免水质污染影响实验结果。
(4)实验结束后需彻底清洗实验器材,做好实验室环境卫生工作。
毕业设计双容水箱系统的建模仿真与控制双容水箱系统的建模、仿真与控制是一种常见的控制系统设计问题,广泛应用于工程实践中。
本文将详细介绍双容水箱系统的建模、仿真与控制方法。
双容水箱系统是由两个水箱和一条水管组成的系统。
水箱之间通过水管连接,顶部设置了液位传感器进行监测。
控制系统的目标是通过控制水箱之间的水流,使得系统的液位保持在设定值附近。
这个问题既涉及到建模和仿真,又涉及到控制方法设计,是一个复杂的系统工程。
以下将分步骤介绍建模、仿真和控制方法。
首先,我们需要对双容水箱系统进行建模。
建模的目的是用数学模型描述系统的动态行为。
对于双容水箱系统,可以利用连续反应曲线方法进行建模。
该方法基于质量守恒原理和容积流量原理,根据水箱的液位变化率和水流量之间的关系,建立系统的微分方程模型。
接下来,我们可以利用建立的数学模型进行仿真分析。
仿真分析可以预测系统在不同工况下的动态响应,帮助我们理解系统的行为特性。
在仿真分析中,我们可以通过改变系统的参数和控制策略,来评估不同的调节方法对系统性能的影响,以及寻找最优的控制方案。
最后,我们需要设计控制方法来使得双容水箱系统达到所需的性能指标。
常用的控制方法包括比例积分微分控制(PID控制),模糊控制和自适应控制等。
在选择控制方法时,需要考虑系统的稳定性、鲁棒性和灵敏度等因素。
通过数学分析和干扰分析,可以确定最优控制参数,使得系统具有良好的控制性能。
总结起来,双容水箱系统的建模、仿真与控制是一个综合性的控制系统设计问题。
通过建立数学模型、进行仿真分析和设计合适的控制方法,可以使得系统达到所期望的控制目标。
该方法在工程实践中具有广泛应用,并可通过实际系统验证,为实际工程提供参考和指导。