基于自抗扰控制器的PMSM矢量控制系统设计与实现
- 格式:pdf
- 大小:729.23 KB
- 文档页数:4
基于自抗扰控制的PMSM转速调节系统崔国祥;张淼;陈思哲【期刊名称】《微特电机》【年(卷),期】2012(040)002【摘要】In the permanent magnet synchronous motor ( PMSM) speed control system,the dynamic response speed and overshoot is contradictory in classical PI regulator. ADRC was introduced into PMSM speed control. Tracking differentiator was adopted to set up a transition for the input, allowing the system work with good speed adaptability, and the extended state observer was used to enhance the robustness of the system by observing and real-time compensating general disturbance. Simulation results show that the speed control system based on PMSM using ADRC can follow the reference speed quickly without overshoot.%经典PI调节的永磁同步电动机转速控制,存在快速性与超调量之间的矛盾.将自抗扰控制技术应用于永磁同步电动机转速控制中,设计跟踪微分器对输入安排过渡过程,使系统有良好的转速适应性;扩张状态观测器通过对综合扰动项的观测和实时补偿,增强了系统的鲁棒性.仿真实验结果表明,基于ADRC的PMSM转速调节系统,可实现对输入信号的快速无超调跟踪.【总页数】4页(P51-54)【作者】崔国祥;张淼;陈思哲【作者单位】广东工业大学,广东广州510006;广东工业大学,广东广州510006;广东工业大学,广东广州510006【正文语种】中文【中图分类】TM351【相关文献】1.基于自抗扰控制的对称六相PMSM与三相PMSM串联系统 [J], 刘陵顺;韩浩鹏;闫红广;孔德彪;肖支才2.基于自抗扰控制器的PMSM伺服控制系统研究 [J], 肖泽民;朱景伟;夏野;赵英序3.基于扰动补偿的PMSM转速环自抗扰控制器设计 [J], 谢传林;曾岳南;王发良;曾祥彩4.基于自抗扰控制器的PMSM矢量控制系统设计与实现 [J], 刘清;王太勇;董靖川;刘清建;李勃5.基于模糊自抗扰控制在电动汽车PMSM位置驱动系统研究 [J], 李晶因版权原因,仅展示原文概要,查看原文内容请购买。
基于自抗扰控制的双环伺服系统详解近年来,由于永磁同步电机(permanentmagnetsynchronousmotor,PMSM)高转矩电流比、效率高等优点,在伺服系统中得到广泛应用。
随着人们对快速定位、调试简单等需求的增加,对伺服驱动器的控制技术提出了更高要求。
因此PMSM构成的伺服系统的控制技术成为研究热点。
针对永磁同步电机系统存在的负载转矩扰动和参数摄动等干扰,人们采用不同的思路进行解决。
一方面,以经典的PID控制为基础,研究参数的在线调整。
另一方面,智能控制技术、滑模变结构控制、预测控制、观测器等先进的控制理论也得到广泛地研究。
本文针对PMSM位置控制,提出一种基于自抗扰控制的双环控制方法。
将ADRC引入到PMSM伺服系统的控制中,利用二阶非线性ADRC实现位置、速度的复合控制,从控制结构上将传统位置、速度、电流三环串级控制变为位置电流双环控制,可简化伺服系统的调试过程和提高动态响应速度。
在建立伺服系统数学模型的基础上,给出位置环的二阶非线性ADRC、电流环一阶线性ADRC的设计方法,并对伺服系统的动态响应以及抗扰动性能进行研究。
一、ADRC抗干扰机理ADRC之所以能够有效地提高系统的抗干扰能力,关键之处在于从被控输出量中提取干扰信号,并在控制律中进行扰动补偿。
为了对系统中的扰动进行观测,需要设计扩张状态观测器,其以系统实际输出y和控制量u来跟踪估计系统的状态变量和扰动量,形式如下所示:式中:z1,z2,,zn为状态变量的观测值;zn+1为扰动估计值;01,02,,0(n+1)为观测器参数。
当i(e)为线性函数时,ESO为线性观测器;而i(e)具有非线性特性时,则为非线性观测器,通过适当选择参数来准确估计系统的状态变量和扰动值。
二、伺服系统自抗扰控制1、伺服系统扰动分析在同步旋转坐标系下,电磁转矩Te可表示为。

基于ADRC+改进型重复控制的PMSM矢量控制方案刘向辰,柴乾隆(中国航空工业兰州万里航空机电有限责任公司航空机电研宄院,甘肃兰州730070)摘要:永磁同步电机(P M S M)在低速运行时,容易受到A/D采样和量化误差、电机转矩脉动、逆变器死区时间以及模型不确定性等扰动的影响,为了降低P M S M在低速运行状态下各种扰动对系统造成的影响,提出一种基于自抗扰控制(A D R C)+改进型重复控制的P M S M矢量控制方案。
该方案在A D R C的基础上,融入重复控制的思想,周期性地补偿并缩小误差,在提高A D R C对内部参数依赖性的同时,改善了电机控制系统的抗干扰能力。
最后,通过Matlab/Simulink仿真和实验,验证了该方案具有抗干扰能力强、调速效果好的优点。
关键词:永磁同步电机;自抗扰控制;重复控制中图分类号:T M351文献标识码:A文章编号:1000-100X(2020)06-0001-05Reserach on the Vector Control Strategy of PMSM Based onADRC+Advanced Repeat ControlLIU Xiang-chen,CHAI Qian-long{College o f Aviation Mechanical and Electrical Engineering^AVIC Lanzhou Wanli Aviation Electromechanical Co., L td., Lanzhou 730070,China)Abstract :Permanent magnet synchronous m o t o r(P M S M)i s susceptible to several factors* affection,such as A/D s a mpling error,quantization error, motor torque ripple,dead time of inverter and uncertainty of motor control system model during low speed operation.In order to reduce the impacts of various disturbances on the system of P M S M under low speed operation ,a vector control strategy of P M S M based on active disturbance rejection control (A D R C)+advanced repeat control is proposed.On the basis of A D R C,t h e proposed strategy integrates the idea of repetitive control.This strategy periodically compensates and reduces the error resulting in improving the dependence of the A D R C on i t s o w n parameters and maximizing the control precision of the motor control system.Finally,the Matlab/Simulink simulation and experimental results show that the strategy has the advantages of strong anti-interference ability and good speed regulation effect.Keywords :permanent magnet synchronous motor ;active disturbance rejection control ;repetitive controll引言近些年来,随着工业自动化的发展,PMSM在 新能源汽车、智能机器人、工业生产等领域取得了 快速发展。
基于自抗扰控制PMSM电压空间矢量调制直接转矩控制方法刘英培【期刊名称】《电力自动化设备》【年(卷),期】2011(31)11【摘要】As the PID regulator has disadvantages and the direct torque control has higher torque and flux linkage ripples and unfixed switching frequency, the SVM (Space Vector Modulated) direct torque control for PMSM(Permanent Magnet Synchronous Motor) based on ADRC (Active-Disturbance Rejection Control) is proposed. The ADRC speed regulator is designed with the given speed and real speed as inputs and the given electromagnetic torque as output to improve the anti-interference ability of system. The realization of SVM is analyzed. The errors of torque and stator flux linkage are accurately compensated and ripples are reduced,while the constant switching frequency of inverter is guaranteed. Simulative and experimental results verify its feasibility and effectiveness.%针对PID调节器的不足及传统直接转矩控制转矩和磁链脉动大、开关频率不恒定等问题,提出基于自抗扰控制器(ADRC)永磁同步电机电压空间矢量调制(SVM)直接转矩控制方法.以给定转速和实际转速作为输入信号,给定电磁转矩作为输出信号,设计了ADRC速度调节器,提高系统的抗干扰能力.在此基础上,详细分析了SVM的实现方式,实现对转矩和磁链偏差的精确补偿,降低转矩和磁链脉动,并保证逆变器开关频率恒定.仿真和实验结果验证了方法的可行性和有效性.【总页数】5页(P78-82)【作者】刘英培【作者单位】华北电力大学电气与电子工程学院,河北保定071003【正文语种】中文【中图分类】TM301.2【相关文献】1.基于电压空间矢量调制技术的直接转矩控制 [J], 汤煊琳2.基于参考磁链电压空间矢量调制策略的永磁同步电机直接转矩控制研究 [J], 刘军;楚小刚;白华煜3.基于自抗扰控制的PMSM直接转矩控制研究 [J], 祁世民;周臻;窦晓华;王永4.基于自抗扰控制器的PMSM直接转矩伺服系统设计 [J], 黄艺香5.基于非线性自抗扰控制器的PMSM直接转矩控制 [J], 李少朋;谢源;张凯;贺耀庭因版权原因,仅展示原文概要,查看原文内容请购买。
自抗扰控制在PMSM伺服控制系统中的应用
杨兴华;姜建国
【期刊名称】《伺服控制》
【年(卷),期】2010(000)006
【摘要】永磁同步电机伺服控制系统的非线性和不确定性的特点,给高性能位置伺服控制的实现带来了困难。
为了克服电机及负载在内的广义被控对象不确定性因素和非线性因素对系统性能造成的影响,本文采用自抗扰控制器设计了伺服控制系统
的速度环和位置环。
自抗扰控制将系统所有扰动量,包括负载扰动、控制跟踪误差、模型误差等等,作为系统的一个状态变量,利用扩张状态观测器对扰动进行在线估计,并根据估计结果对扰动进行前馈补偿控制,从而抑制扰动对整个伺服控制系统的影响。
【总页数】5页(P36-39,42)
【作者】杨兴华;姜建国
【作者单位】上海交通大学电气工程系
【正文语种】中文
【中图分类】T
【相关文献】
1.神经网络优化自抗扰控制在供输弹系统中的应用 [J], 张松;王茂森;戴劲松
2.变增益策略在PMSM自抗扰控制中的应用与研究 [J], 李寅生;陈永军
3.优化自抗扰控制在刨花板施胶流量跟踪中的应用 [J], 郭继宁;孙丽萍;曹军;朱良
宽
4.自抗扰控制在加热器水位控制中的应用 [J], 张军亮;刘龙;史鹏飞;曹耀武;费盼峰;胡振亚
5.自抗扰控制在加热器水位控制中的应用 [J], 张军亮;刘龙;史鹏飞;曹耀武;费盼峰;胡振亚
因版权原因,仅展示原文概要,查看原文内容请购买。
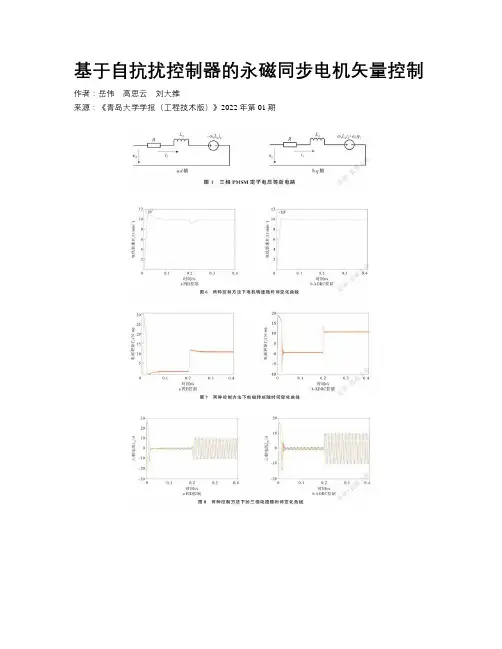
基于自抗扰控制器的永磁同步电机矢量控制作者:岳伟高思云刘大维来源:《青岛大学学报(工程技术版)》2022年第01期文章編号: 10069798(2022)01009706; DOI: 10.13306/j.10069798.2022.01.015摘要:针对传统的三相永磁同步电机存在的矢量控制方式启动电流和超调量过大及抗干扰性不强等问题,本文设计了一种基于自抗扰控制器的三相永磁同步电机矢量控制系统。
在传统双闭环PI控制系统结构的基础上,在Matlab/Simulink软件中,分别采用PI控制器和自抗扰控制器搭建转速环三相永磁同步电机矢量控制系统模型,为了对比控制效果,将两种控制器置于相同电机参数和相同仿真条件下,通过仿真得到两种控制方法下的电机转速、电磁转矩和电流响应。
仿真结果表明,基于自抗扰控制器的三相永磁同步电机矢量控制系统,控制性能更优,具有更小的超调量、更好的动态性和更强的鲁棒性。
该研究为永磁同步电机的矢量控制提供了理论参考。
关键词:永磁同步电机; 矢量控制; PI控制;自抗扰控制器; Simulink仿真中图分类号: TM351文献标识码: A近年来,永磁同步电机(permanent magnet synchronous machine,PMSM)由于体积小、低损耗、响应速度快、能量密度高等性能优势,广泛应用于电动车、冰箱、空调压缩机以及其它高精尖产业[1]。
PMSM是非线性控制系统,其参数多具时变性,多变量之间耦合性强[27]。
为了实现对PMSM的控制,需要采用磁场定向的矢量控制方法对PMSM进行解耦。
在工业应用中,PMSM矢量控制的转速环和电流环广泛采用PI控制器。
传统PI控制器模型简单,可靠性高,鲁棒性好,能抵抗一定程度上的微量扰动,但其参数固定不变,因此基于PI控制器对环境变化的自适应性能较差,且控制参数往往整定不良,难以对突加扰动迅速做出动态响应,对微小的超调具有更强的抗干扰性 [8]。
基于自抗扰控制器的PMSM直接转矩伺服系统设计黄艺香【摘要】在分析自抗扰控制理论的基础上,根据三相交流永磁同步伺服电机的非线性动态模型,介绍了以DSP及智能功率模块(IPM)实现的基于自抗扰控制器的PMSM直接转矩伺服系统实现方案,详述了该方案的硬件结构和软件设计。
系统控制电路采用DSP+FPGA〔TMS320F2812+EP1C6〕的CPU结构,功率电路以三菱IPM PS21867构成逆变器。
实验运行表明,采用自抗扰控制器伺服系统实时性好,具有较强的鲁棒性和适应性,良好动态性能。
硬件方案合理,结构通用紧凑。
【期刊名称】《黑龙江科技信息》【年(卷),期】2014(000)013【总页数】4页(P83-86)【关键词】永磁同步电机;自抗扰控制器;直接转矩控制;DSP;FPGA;IPM【作者】黄艺香【作者单位】南京林业大学,江苏南京 210037【正文语种】中文永磁同步电动机(PMSM)结构简单、功率密度大、效率高、转子损耗小,在医疗器械、家用电器等方面已经得到了广泛的应用,在各种高性能工业传动系统中也越来越受重视,特别在数控机床、工业机器人等小功率应用场合,永磁同步电动机伺服系统是主要的发展趋势。
现阶段,国内急需解决的主要问题就是控制器的国产化,如何研究并制造高性能、高可靠性的伺服系统有着重要的现实意义。
目前,永磁同步电机的控制方法主要有两种:矢量控制方法(VC)和直接转矩控制方法(DTC)。
矢量控制方法出现较早,技术比较成熟,其优点在于利用高性能的DSP和高精度的光电码盘转速传感器,调速范围可达1:1000,同时系统的动态性能也很好,是目前最常用的控制方法。
但它存在(1)计算复杂,需要作静止、旋转坐标变换,影响实时性;(2)转子磁场空间位置难精确定位,影响旋转坐标轴线定位及解耦效果等不足,由此造成实际系统的实现效果很难达到理论水平。
相比较矢量控制方法,直接转矩控制摒弃了解耦的思想,取消了旋转坐标变换,简单的通过电机定子电压和电流,借助瞬间空间矢量理论计算电机的磁链和转矩,并根据与给定值比较所得差值,实现磁链和转矩的直接控制。
研究与设计Research and Design52 引言永磁同步电机在各类电机中,具有效率高、体积小、温升低、无需励磁绕组等诸多优点。
随着永磁同步电机在各种不同场合的应用日益广泛,其控制理论也不断成熟,先后形成了三种控制策略,分别为:恒压频比控制(VVVF )、磁场定向控制 (FOC-SVPWM )、直接转矩控制(DTC )[2]。
随着控制理论的不断发展,出现了以系统状态方程为研究对象的现代控制理论,在交流电机控制系统的研究中引进了诸多先进的控制策略,例如神经网络控制、自适应控制、模糊控制等,并且取得了一定的成果。
但现代控制算法往往计算复杂,对被控对象地精确数学模型依赖较强,难以应用到实际工程[4]。
ADRC 是一种新型的非线性控制器,综合了经典PID 控制器不依赖于被控对象具体数学模型的优点以及现代控制理论的设计方法[3]。
1 PMSM 数学模型介绍为实现PMSM 定子电流解耦控制,往往在交直轴坐标系下分析其数学模型,文献[4]指出,根据定子电压方程、磁链方程、电磁转矩方程以及机械运动方程,在i d =0 控制策略下,速度环以i q 作为对象输入,w r 为输出,可得如下微分方程:w J p i J p T J w R r n f q n l 2}=--X o (1.1)式中,p n 为极对数,J 为转动惯量,Ψf 为转子磁链,i q 为q 轴电流,T l 为负载转矩,w 为电角速度,R Ω为阻尼系数。
电流环以[u d u q ]T 作为输入, [i d i q ]T 为输出在dp 轴下可如下得微分方程: (1.2)()i i L R i i wi w i L L u u 1Wd qa a dq qd af a d q }=-+-+++o o ==>=G G H G 式中, L d =L q =L a 为交直轴电感,R a 为定子绕组,W 为系统未知扰动。
2 自抗扰控制器自抗扰控制技术是一种典型的基于误差来消除误差的控制策略,其最突出的特点就是把作用于被控对象的所有不确定因素都归结于未知扰动,然后用被控对象的输入、输出数据作为控制器输入,经过一系列运算处理,对此扰动进行在线估计与补偿。
第37卷第6期2023年11月兰州文理学院学报(自然科学版)J o u r n a l o fL a n z h o uU n i v e r s i t y ofA r t s a n dS c i e n c e (N a t u r a l S c i e n c e s )V o l .37N o .6N o v .2023收稿日期:2023G03G26作者简介:高俊岭(1966G),女,安徽凤台人,副教授,硕士,研究方向为电力电子与电力传动.E Gm a i l :603618156@q q.c o m.㊀∗通信作者:黄豪磊(1998G),男,河南淮阳人,在读硕士,研究方向为永磁电机控制.E Gm a i l :2436001906@q q.c o m.㊀㊀文章编号:2095G6991(2023)06G0041G05自抗扰和新型滑模观测器的P M S M 无传感器控制高俊岭,黄豪磊∗,张㊀磊,田㊀琳(安徽理工大学电气与信息工程学院,安徽淮南232001)摘要:针对中高速情况下,带有滑模控制器的传统控制方法存在动态响应慢㊁抖振较大㊁转子转速及位置信息估计精度差等问题,设计一种自抗扰控制结合新型滑模观测器的控制策略.速度环采用自抗扰速度控制器改善系统的动态响应速度和抗扰性能;新型滑模观测器采用边界层厚度随转子速度动态可调的正弦输入函数作为切换函数,有效抑制了观测器抖振;基于反电动势模型设计反电动势观测器,省去了低通滤波器,提高了转速和转子位置的估计精度.通过仿真实验验证了本文方法的有效性和可行性.关键词:P M S M ;无传感器控制;自抗扰控制器;新型滑模观测器中图分类号:TM 351㊀㊀㊀文献标志码:AS e n s o r l e s sC o n t r o l o fP M S M B a s e do nA c t i v eD i s t u r b a n c eR e j e c t i o na n dN e wS l i d i n g Mo d eO b s e r v e r G A OJ u n Gl i n g ,HU A N G H a o Gl e i ∗,Z HA N GL e i ,T I A N L i n (S c h o o l o fE l e c t r i c a l a n d I n f o r m a t i o nE n g i n e e r i n g,A n h u iU n i v e r s i t y o f S c i e n c e a n dT e c h n o l o g y,H u a i n a n232001,A n h u i ,C h i n a )A b s t r a c t :A i m i n g a t t h e p r o b l e m s o f t r a d i t i o n a l c o n t r o lm e t h o d sw i t h s l i d i n g mo d e c o n t r o l l e r s s u c ha s s l o wd y n a m i c r e s p o n s e ,l a r g e c h a t t e r i n g ,a n d p o o r e s t i m a t i o n a c c u r a c y o f r o t o r s p e e d a n d p o s i t i o n i n f o r m a t i o n a tm e d i u ma n d h i g h s p e e d s ,a c o n t r o l s t r a t e g y b a s e d o n a u t o d i s t u r b Ga n c e r e j e c t i o n c o n t r o l a n d an e ws l i d i n g m o d e o b s e r v e r i s d e s i g n e d .T h e s p e e d l o o p a d o pt s a n a u t od i s t u r b a n c er e j e c t i o ns p e e dc o n t r o l l e rt o i m p r o v et h ed y n a m i cr e s p o n s es p e e da n dd i s Gt u r b a n c e r e j e c t i o n p e r f o r m a n c e o f t h e s y s t e m.T h e n e ws l i d i n g m o d e o b s e r v e r u s e s a s i n u s o i d Ga l i n p u t f u n c t i o nw h o s e b o u n d a r y l a y e r t h i c k n e s s i s d y n a m i c a l l y a d j u s t a b l ew i t h r o t o r s pe e d a s a s w i t c h i n gf u n c t i o n ,e f f e c t i v e l y s u p p r e s s i ng th e o b s e r v e r c h a t t e ri n g .T h e b a c k e l e c t r o m o t i v e f o r c e o b s e r v e r i s d e s i gn e db a s e do n t h eb a c ke l e c t r o m o t i v e f o r c em o d e l ,w h i c he l i m i n a t e s t h e l o w Gp a s s f i l t e r a n d i m p r o v e s t h ee s t i m a t i o na c c u r a c y o f r o t a t i o n a l s pe e da n dr o t o r p o s i t i o n .T h e ef f e c t i v e n e s s a n d f e a s i b i l i t y a r e v e r i f i e d t h r o ug hs i m u l a t i o ne x pe r i m e n t s .K e y w o r d s :P M S M ;s e n s o r l e s sc o n t r o l ;a c t i v ed i s t u r b a n c er e j e c t i o nc o n t r o l l e r ;n e w s l i d i n g m o d e o b s e r v e r㊀㊀永磁同步电机(P e r m a n e n tM a g n e tS y n c h r o Gn o u sM o t o r ,P M S M )凭借高效率㊁结构简易等优势,在电动汽车㊁风机等领域获得了广泛应用[1].传统P M S M 普遍采用机械式传感器对转子信息进行检测,这种检测方法存在电机体积大㊁可靠性低等缺点,无传感器控制很好地解决了这些问题,诸多学者也一直致力于该领域的研究[2].目前,中高速无传感器控制主要有扩展卡尔曼滤波(E K F )[3]㊁滑模观测器(S MO )[4]和模型参考自适应(M R A S)[5]等方法.滑模观测器(S l i d i n g Mo d eO b s e r v e r ,S MO )法是一种使用非常广泛的控制策略,由于滑模控制器自身机制会引起严重的系统抖振,文献[6]采用分段指数型函数作为滑模切换函数,有效削弱了滑模抖振,提高了系统的电流响应,但低通滤波器的使用使相位存在一定的滞后性.文献[7]采用高阶滑模观测器观测转子信息,应用新型滑模控制器作为速度控制器,有效降低了系统抖振,获得了良好的控制效果,由于系统转速存在较大的超调量,导致转速估计精度不高.文献[8]设计了一种双滑模控制策略,对滑模速度控制器和观测器都进行了优化,有效缩短了系统的响应时间,降低了系统抖振,但该方法在一定程度上增加了系统的运算量.本文以i d =0的P M S M 矢量控制系统为研究对象,速度环采用自抗扰控制器(A c t i v eD i s Gt u r b a n c eD e je c t i o nC o n t r o l l e r ,A D R C )提高了系统的动态响应速度,增强了系统的抗扰能力.在满足L y a p u n o v 稳定性的条件下设计新型滑模观测器(N e w S l i d i n g M o d eO b s e r v e r ,N S MO ),从切换函数的角度降低了系统抖振,同时设计了一种可变边界层正弦输入函数;利用反电动势观测器对等效反电动势进行处理,有效避免了低通滤波器的使用及相位补偿问题.1㊀自抗扰速度控制器设计1.1㊀永磁同步电机的数学模型表贴式P M S M 在d ㊁q 坐标系下的数学模型为:d i d d t =1L s u d -R L s i d +ωr L sφq ,d i q d t =1L s u q -R L s i q +ωr L sφd ,d ωr d t =P n J T e -P n J T L -B ω,T e =3P n φfi q 2,ìîíïïïïïïïïïï(1)式中:u d ㊁u q 为定子电压d ㊁q 轴分量;i d ㊁i q 为定子电流d ㊁q 轴分量;L s 为定子电感;φf 为转子永磁体磁链;J 为转动惯量;T e 为电磁转矩;φd ㊁φq 分别为磁链的d ㊁q 轴分量;T L 为负载转矩;P n 为极对数;B ω为摩擦系数;ωr 为转子角速度;i q 为交轴电流;R 为定子电阻.1.2㊀速度环ADRC 设计自抗扰控制主要包括跟踪微分器(T D )㊁扩张状态观测器(E S O )和非线性误差反馈控制率(N L S E F ).为了减少计算量,速度环采用一阶A D R C .T D :e 1=z 11-w ∗,z11=-r 0f al e 1,α1,δ1().{(2)E S O :e 2=z 21-w ,z 21=z 22-β1f a l e 2,α21,δ21()+b u ,z 22=β2f a l e 2,α22,δ22().ìîíïïïï(3)N L S E F :e 3=z 11-z 21,u 0=kf a l e 3,α3,δ3(),u =u 0-z 22/b .ìîíïïïï(4)以上公式中:e 1㊁e 2㊁e 3为误差信号;α1㊁α21㊁α22㊁α3为跟踪因子;δ1㊁δ21㊁δ22㊁δ3为滤波因子;w ∗为T D 的输入信号;z 11为w ∗的跟踪信号;r 0为T D 的速度因子;β1㊁β2为E S O 输出误差校正增益;ω为输出信号;z 21为E S O 观测输出速度;z 22为扰动观测量;u 0为N L S E F 输出控制信号;k 为调节器增益;b 为补偿因子;u 是补偿后的输入信号;f al 代表非线性函数,其表达式为:f al e ,α,δ()=|e |αs gn e (),|e |>δ,e δα-1,|e |ɤδ.{(5)式中:s gn 为符号函数.2㊀新型滑模观测器设计式(1)中d ㊁q 坐标下的电流方程经反Pa r k 变换得到α㊁β静止坐标下的电流方程为:d i αd t =-R L s i α+1L s u α-e α(),d i βd t =-R L s i β+1L s u β-e β(),e α=-φf ωr s i n θ,e β=φfωr c o s θ,ìîíïïïïïïïï(6)式中:i α㊁i β为定子电流;u α㊁u β为定子电压;θ为转子位置角;e α㊁e β表示扩展反电势.由定子电流误差构建新型滑模观测器的结构模型如图1所示.2.1㊀新型滑模观测器利用电流误差构造滑模面为:s (x )=s αs βæèçöø÷=i ɡα-i αi ɡβ-i βæèççöø÷÷,(7)24㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀兰州文理学院学报(自然科学版)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第37卷图1㊀新型滑模观测器结构式中:s α㊁s β为定子电流误差,i ɡα㊁i ɡβ表示定子电流估计数值.不同滑模函数设计的滑模观测器具有不同的观测效果,传统滑模观测器通常采用开关函数作为滑模切换函数,而开关函数存在严重的滑模抖振.为了减弱系统抖振,文献[9]采用边界层固定不变的饱和函数作为滑模函数,但固定边界层厚度会影响系统的收敛速度.因此,采用边界层随转速可调的正弦输入函数F (s )作为切换函数,用来削弱滑模抖振和满足高性能控制的需要,其表达式为:F s ()=s i n πs 2m æèçöø÷,s <m ,s i gn s (),s ȡm ,ìîíïïï(8)式中:m 为边界层厚度(正常数);s 为滑模面函数.F (s )的函数曲线如图2所示.图2中,F (s )在整个实数域内连续且在零点处的函数值为零,常数m 可以调节F s ()的陡度.边界层厚度m 1㊁m 2㊁m 3分别对应转速ω1㊁ω2㊁ω3.速度较高时,通常采用较小的边界层m ,此时对系统抖振的抑制较强,同理低速系统通常采用较大的边界层.因此,不同转速下的m 值可通过查表法获得.图2㊀F (s )函数曲线㊀㊀边界层厚度m 通过经验获得,在满足系统收敛性的同时要尽可能小[10].以300r /m i n ~1000r /m i n 转速范围为例,将这一范围划分为4个区间,不同区间的边界层m 如表1所列.本文取m =0.2,重新定义了边界层厚度.表1㊀不同转速下边界层厚度转速/(r m i n -1)3005008001000边界层厚度/mm0.850.650.500.45㊀㊀新型滑模观测器的模型设计为:d i ɡαd t =-R L s i ɡα+1L s[u α-K F s α()],d i ɡβd t =-R L s i ɡβ+1L s[u β-K F s β()],ìîíïïïïïï(9)式中:K 为常数,表示滑模增益.式(9)减去式(6)即可得到电流误差方程为:d s αd t =-R L s s α+1L s e α-1L sK F s α(),d s βdt =-R L s s β+1L s e β-1L s K F s β().ìîíïïïï(10)将式(10)简化为:sαβ=A s αβ+B e αβ-K F s αβ()(),(11)式中:A =-R/L s 00-R /L s æèçöø÷;电感矩阵B =1/L s 001/L s æèçöø÷;反电动势e s =e αe βæèçöø÷;s αβ=s αs βæèçöø÷.为了保证系统稳定,构造L y a pu n o v 函数为:V =12s T s =12s 2α+s 2β()=12s 2αβ.(12)根据L y a p u n o v 第二方法可知,只有V=s Tαβsαβ<0,才能保证系统稳定,即V=A s T αβs αβ+B s Tαβe s -K F s αβ()()<0,(13)式中,A s T αβs αβɤ0恒成立.为保证观测器稳定,滑模增益K 的设定范围为:K >m a x (|e α|,|e β|),即滑模增益K 应大于反电动势的最大幅值.2.2㊀反电动势观测器传统滑模观测器由于低通滤波器的使用会给系统带来相位延迟,且延迟角度的大小与电机实际转速及低通滤波器截止频率有关,估计精度较差.设计反电动势观测器不仅能够避免低通滤波器的使用和由此产生的相位补偿问题,简化系统,而且有效提高了转子位置和速度的估计精度.P M S M 的反电动势模型可表示为:d e αd t=-ωr e β,d e βd t=ωr e α.ìîíïïïï(14)由反电动势模型可以得到反电动势观测器设34第6期高俊岭等:自抗扰和新型滑模观测器的P M S M 无传感器控制计方程为:d d te ɡα=-ωɡr e ɡβ-h e ɡα-e α(),d d t e ɡβ=ωɡr e ɡα-h e ɡβ-e β(),d d tωɡr =e ɡα-e α()e ɡβ-e ɡβ-e β()e ɡα.ìîíïïïïïïïï(15)式中:h 为观测器增益;e ɡα㊁e ɡβ为反电势观测值;ωɡr为角速度估计值.式(15)减式(14)得反电动势观测器误差方程为:d d te ~α=-ω~r e ɡβ-ωr e ~β-h e ~α,d d t e ~β=ω~r e ɡα+ωr e ~α-h e ~β,d d tω~r =e ~αe ɡβ-e ɡαe ~β.ìîíïïïïïïïï(16)式中:e ~α=e ɡα-e α;e ~β=e ɡβ-e β;ω~r =ωɡα-ωα.通过分析观测器的稳定性,定义L y a p u n o v 函数为:V =12e ~2α+e ~2β+ω~2r ().(17)对式(17)求微分可得:V=e ~αe ~ α+e ~βe ~β+ω~r ω~ r.(18)将式(16)代入式(18),得:V=-h e ~2α+e ~2β().(19)因为h >0,则V<0,满足L y a pu n o v 稳定性条件,说明观测器满足稳定性和可达性.3㊀仿真实验与结果分析在M a t l a b /S i m u l i n k 中搭建自抗扰和新型滑模观测器的P M S M 控制系统仿真模型.系统整体框架如图3所示.图3㊀自抗扰和新型滑模观测器的P M S M 系统框架㊀㊀通过与传统滑模控制器(S l i d i n g Mo d eC o n Gt r o l l e r ,S M C )和观测器相结合的控制方法进行对比,验证自抗扰和新型滑模观测器的优越性.仿真所用的P M S M 主要电气参数如表2所列.表2㊀永磁同步电机主要参数参数数值直流侧电源电压u d c/V 311开关频率f s /k H z 10永磁体磁链φf /W b 0.175定子电感L s/mH 8.5定子电阻R /Ω2.875电机磁极对数P n43.1㊀加速和抗扰性能分析A D R C 和S M C 控制方法下的实际转速波形如图4所示.图4㊀A D R C 和S M C 实际转速波形㊀㊀由图4可知,与传统滑模控制器相比,自抗扰控制器在电机启动和突加转速时能够快速稳定于给定转速,响应速度更快,转速抖振几乎为零.在0.08s 突加5N m 负载时,传统滑模控制器的转速降落达到了95r /m i n ,恢复给定转速所需时间较长;而自抗扰控制器的转速降落仅为8r/m i n,转速波动较小.结果表明自抗扰控制器具有较好的动态性能和抗干扰能力.两种控制方法下的转速误差如图5所示.由图5可知,传统滑模观测器初始启动阶段的转速误差达到了10r /m i n ,当转速增加至1000r /m i n时,误差在-2~4r /m i n 之间波动,且突加转速或突加负载时误差都发生了较大波动;而新型滑模观测器在启动阶段的转速误差最大仅为0.12r /m i n ,当转速增加至1000r /m i n 时,误差在0 02~0.1r /m i n 之间波动,有效减小了转子转速的估计误差.44㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀兰州文理学院学报(自然科学版)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第37卷图5㊀实际转速与估计转速误差3.2㊀观测器性能分析两种控制方法下的转子实际角度与观测角度曲线如图6所示.由图6可知,新型滑模观测器的转子位置跟踪效果明显优于传统滑模观测器.图6㊀滑模观测器实际角度与观测角度㊀㊀当转速为500r /m i n 时,传统滑模和新型滑模观测器的转子位置估计误差比较曲线如图7所示.由图7可知,传统滑模观测器得到的位置估计误差达到了0.026r a d ,并伴有高频抖振;而改进滑模观测器的位置估计误差仅为0.0105r a d ,有效削弱了抖振幅值并减小了转子位置估计误差.4㊀结语本文以表贴式P M S M 为研究对象,速度环采用A D R C 控制器,使系统在初始启动和加速过程中都能快速稳定,当负载突变时,抗干扰能力较强.新型滑模观测器利用边界层可调的正弦输入图7㊀传统S M O 和N S M O 转子位置估计误差函数,有效削弱了观测器抖振;通过反电动势观测器对反电动势进行提取,避免了低通滤波器的使用及由此带来的相位补偿问题,提高了系统的跟踪精度.参考文献:[1]申永鹏,刘安康,崔光照,等.扩展滑模观测器永磁同步电机无传感器矢量控制[J ].电机与控制学报,2020,24(8):51G57,66.[2]王丽,高远,袁海英.基于改进型S MO 的P M S M 无传感器鲁棒控制方法[J ].广西科技大学学报,2022,33(2):48G53,68.[3]Q U A N G N K ,H I E U N T ,HA Q P .F P G A Gb a s e d s e n s o r l e s sP M S M s p e e dc o n t r o lu s i n g re d u c e d Go r d e r e x t e n d e dK a l m a nf i l t e r s [J ].I E E E T r a n s a c t i Go n so n I n d u s t r i a l E l e c t r o n i c s ,2014,61(12):6574G6582.[4]L I A N GD ,L I J ,Q UR.S e n s o r l e s s c o n t r o l o f pe r m a Gn e n tm a g n e ts y n c h r o n o u s m a c h i n eb a s e do ns e c o n d Go r d e r s l i d i n gGm o d e o b s e r v e rw i t ho n l i n e r e s i s t a n c e e s Gt i m a t i o n [J ].I E E E T r a n s a c t i o n so n I n d u s t r y A p p l i c a Gt i o n s ,2017,53(4):3672G3682.[5]李京,王仲根,沈志俊,等.永磁同步电机双滑模无传感器矢量控制研究[J ].兰州文理学院学报(自然科学版),2022,36(4):47G52.[6]张立伟,李行,宋佩佩,等.基于新型滑模观测器的永磁同步电机无传感器矢量控制系统[J ].电工技术学报,2019,34(S 1):70G78.[7]杨浩,赵强,杨钊,等.基于新型双滑模的永磁同步电机无传感器矢量控制[J ].科学技术与工程,2022,22(6):2252G2258.[8]李凡,彭思齐,蒋雨函,等.基于改进的滑模控制器和观测器的S P M S M 控制[J ].控制工程,2022,29(9):1625G1630,1651.[9]仝兆景,郑权,韩耀飞,等.基于新滑模观测器的永磁同步电机无传感器控制[J ].电子科技,2021,34(12):1G6,41.[10]郑征,赵来阔.基于自适应滑模观测器的P M S M 无位置传感器研究[J ].武汉大学学报(工学版),2022,55(4):387G393,400.[责任编辑:李㊀岚]54第6期高俊岭等:自抗扰和新型滑模观测器的P M S M 无传感器控制。
基于自抗扰控制器的PMSM伺服控制系统研究肖泽民;朱景伟;夏野;赵英序【期刊名称】《微电机》【年(卷),期】2018(051)003【摘要】将自抗扰控制器(ADRC)应用在交流永磁同步电机(PMSM)伺服控制系统中,针对永磁同步电机伺服系统的高精度、快速响应等要求,对伺服控制系统三个闭环分别设计自抗扰控制器.在电流环设计一阶自抗扰控制器来取代常用的PID控制器,将位置环、速度环整合为一个统一的闭环并设计二阶自抗扰控制器进行控制;针对不同环节的控制要求和目的,采用不同的函数组合形式设计相应的控制器,充分利用自抗扰控制器的优良控制特性来满足高精度伺服控制系统的要求.通过搭建Simulink仿真模型进行验证,该伺服控制系统具有跟踪速度快、无超调、控制精度高、对负载及参数变化鲁棒性强等特点.【总页数】5页(P57-61)【作者】肖泽民;朱景伟;夏野;赵英序【作者单位】大连海事大学轮机工程学院,辽宁大连116026;大连海事大学轮机工程学院,辽宁大连116026;大连海事大学轮机工程学院,辽宁大连116026;大连海事大学轮机工程学院,辽宁大连116026【正文语种】中文【中图分类】TM351;TP273【相关文献】1.基于自抗扰控制器的PMSM无传感器控制 [J], 姚光耀;谭国俊;吴翔;刘光辉2.基于扰动补偿的PMSM转速环自抗扰控制器设计 [J], 谢传林;曾岳南;王发良;曾祥彩3.基于自抗扰控制器的PMSM矢量控制系统设计与实现 [J], 刘清;王太勇;董靖川;刘清建;李勃4.基于自抗扰控制器的PMSM直接转矩伺服系统设计 [J], 黄艺香5.基于非线性自抗扰控制器的PMSM直接转矩控制 [J], 李少朋;谢源;张凯;贺耀庭因版权原因,仅展示原文概要,查看原文内容请购买。
基于自抗扰控制器的永磁同步电机位置伺服系统一、本文概述随着工业自动化的快速发展,永磁同步电机(PMSM)作为高性能伺服系统的核心部件,在精密制造、航空航天、机器人等领域得到了广泛应用。
然而,PMSM的位置伺服控制面临诸多挑战,如参数不确定性、外部干扰以及系统内部非线性等,这些问题往往导致控制精度和动态性能不足。
为此,本文提出了一种基于自抗扰控制器(ADRC)的永磁同步电机位置伺服系统,旨在通过先进的控制策略提高系统的鲁棒性和精度。
自抗扰控制器是一种源自中国的先进控制技术,它通过扩张状态观测器(ESO)估计并补偿系统总扰动,实现了对不确定性和干扰的有效抑制。
本文首先介绍了PMSM的数学模型和传统控制方法存在的问题,然后详细阐述了自抗扰控制器的设计原理及其在PMSM位置伺服系统中的应用。
通过仿真和实验验证,本文展示了自抗扰控制器在提高系统稳定性、动态响应和定位精度方面的优越性能。
本文的主要内容包括:PMSM的数学模型分析、自抗扰控制器的设计原理、PMSM位置伺服系统的实现方法、仿真和实验结果分析以及结论与展望。
通过本文的研究,旨在为PMSM位置伺服系统的控制策略设计提供新的思路和方法,推动高性能伺服系统在实际应用中的进一步发展。
二、永磁同步电机及位置伺服系统基础永磁同步电机(PMSM)是一种利用永磁体产生磁场的同步电机,具有高效率、高功率密度和良好调速性能等优点,因此在位置伺服系统中得到广泛应用。
PMSM的位置伺服系统是一种典型的闭环控制系统,其目的是通过精确控制电机的转速和转角,实现对目标位置的快速、准确跟踪。
在PMSM位置伺服系统中,电机转子的位置信息通过位置传感器(如编码器)进行实时检测,并与目标位置进行比较,形成位置误差信号。
该误差信号经过控制器处理后,生成相应的控制信号,驱动电机进行运动,以减小位置误差。
因此,控制器的性能对位置伺服系统的精度和动态性能具有重要影响。
自抗扰控制器(ADRC)是一种新型的非线性控制方法,具有强鲁棒性和良好的跟踪性能。