2017年江苏大学生机器人大赛项目设置汇总表
- 格式:doc
- 大小:80.50 KB
- 文档页数:1
第五届江苏省大学生机器人比赛空中机器人组比赛规则(补充)本次空中机器人的比赛总分140分,分为以下三个部分:一:PPT展示部分(40分)二:室外比赛部分(50分)三:室内比赛部分(50分)注:[1].室内、外飞行可使用不同的空中机器人,不限体积,不限方式,只体现技术;[2].空中机器人可以使用智能、远程视频控制的方式,但排除现场遥控方式。
1.PPT展示及答辩部分(40分)PPT展示及答辩环节,主要考察空中机器人是否由参赛团队自主研发制作和技术水平,参赛团队队长使用PPT讲述参赛空中机器人的设计思路以及创新之处。
评委对参赛团队进行现场提问并根据参赛者讲述及回答情况,以及整体技术水平(例如VSLAM、自主、智能等),进行打分。
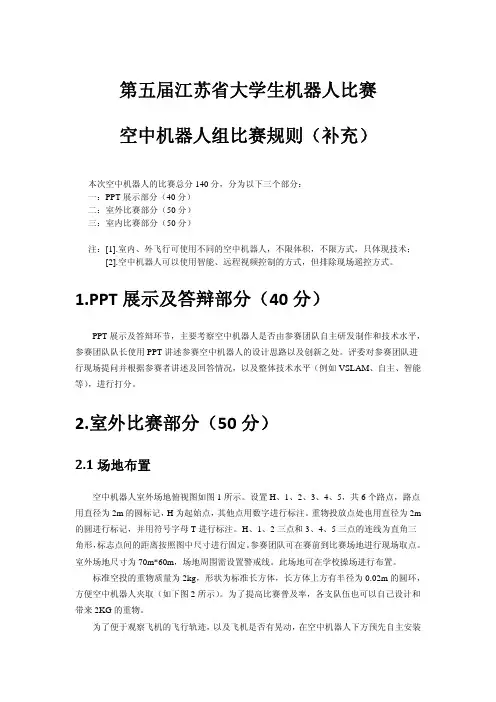
2.室外比赛部分(50分)2.1场地布置空中机器人室外场地俯视图如图1所示。
设置H、1、2、3、4、5,共6个路点,路点用直径为2m的圆标记,H为起始点,其他点用数字进行标注。
重物投放点处也用直径为2m 的圆进行标记,并用符号字母T进行标注。
H、1、2三点和3、4、5三点的连线为直角三角形,标志点间的距离按照图中尺寸进行固定。
参赛团队可在赛前到比赛场地进行现场取点。
室外场地尺寸为70m*60m,场地周围需设置警戒线。
此场地可在学校操场进行布置。
标准空投的重物质量为2kg,形状为标准长方体,长方体上方有半径为0.02m的圆环,方便空中机器人夹取(如下图2所示)。
为了提高比赛普及率,各支队伍也可以自己设计和带来2KG的重物。
为了便于观察飞机的飞行轨迹,以及飞机是否有晃动,在空中机器人下方预先自主安装一个垂直指向地面的高强度激光笔(该笔赛场不提供),评委可以根据激光点的位置来判断飞机的位置。
另外当飞机有晃动时,激光笔照在地面的光点也会晃动,可以判断空中机器人的稳定性。
0.2m.1m0.03m0.02mO.1m图2 标准投放重物示意图2.2室外比赛流程1.自主离陆空中机器人从起点H点自主离陆,至高于地面5米处悬停,评委对空中机器人起飞状态图1 空中机器人室外场地俯视图进行打分。
智能引领创新致用2017年华北五省(市、自治区)大学生机器人大赛竞赛规则大赛组委会2017年5月4日目录一、机器人创意设计赛规则 (4)(一)比赛目的 (4)(二)比赛任务 (4)(三)比赛要求 (5)二、机器人武术擂台赛(无差别组、仿人组)规则 (6)(一)无差别组 (6)(二)仿人组 (11)(三)违例与处罚 (14)(四)其它 (15)三、类人机器人竞技体育赛(田径、点球、投篮、高尔夫)规则 (16)(一)田径比赛 (16)(二)点球比赛 (17)(三)投篮比赛 (17)(四)高尔夫球 (18)四、水中机器人比赛(水球2V2、管道检测)规则 (20)(一)水球2V2 (20)(二)管道检测 (29)五、空中机器人比赛(基础组、高级组)规则 (31)(一)简介 (31)(二)基础比赛部分 (31)(三)高级比赛部分 (32)(四)参赛要求 (32)(五)场地 (33)六、小型组机器人足球赛规则 (37)七、舞蹈机器人比赛规则 (38)(一)个人组 (38)(二)团体组 (42)八、智能物流机器人挑战赛规则 (45)(一)比赛目的 (45)(二)比赛任务 (45)(三)比赛规则 (45)(四)比赛计分标准 (47)一、机器人创意设计赛规则(一)比赛目的比赛鼓励学生进行自己动手设计制作机器人,并现场展示,对于抄袭、购买现成机器人产品的,评审组专家可根据实际情况取消比赛成绩。
培养学生如下几点能力:(1)机构认知、动手能力:机器人本体机构认识,锻炼动手能力。
(2)电气系统认知:机器人电气系统,锻炼电气连接动手能力、传感器系统设计。
(3)控制系统认识:机器人控制系统设计,控制算法、编写控制程序(4)软件系统认识:机器人软件系统设计,锻炼决策算法的编写。
(5)一个小组:2-5人每人负责一块任务,锻炼学生团队合作能力(二)比赛任务1. 评审组对论文进行现场评审和答辩,学生讲述时间5分钟,答问时间5~10分钟,总时间10~15分钟。
附件1:江苏省素质体育机器人积分联赛苏州分赛赛事细则竞赛项目:一、机器人竞速赛二、机器人投篮竞赛三、苏州古建筑机器人游览赛四、3D虚拟机器人赛五、乐高越野车大赛一、机器人竞速赛1. 比赛场地简介1.1比赛场地示意图1.2比赛场地由4条赛道组成,每条赛道宽1米,长0.5米。
2.机器人要求2.1机器人由参赛队自备。
2.2机器人必须由组委会指定的机器人套装参赛。
2.3机器人上必须显示参赛队编号。
在不影响正常比赛的基础上,机器人可进行个性化的装饰,以增强其表现力和识别度。
2.4机器人所有零部件必须可靠固定,不允许脱落于场地之上。
2.5不允许使用有可能损坏竞赛场地的危险元件。
3.比赛规则3.1比赛时机器人从起始线出发,在指定的赛道竞速,机器人任意部分碰到终点线即为完成比赛任务。
3.2 在比赛中,机器人跑出赛道的边界线,即终止比赛。
3.3比赛时间为180秒,超过时间则裁判示意比赛结束,最后以每组机器人完成比赛时间排列名次,参赛队完成时间短为优胜者。
3.4 机器人现场搭建,搭建时间为1个小时。
二、机器人投篮竞赛1.内容简介机器人从起始区携带乒乓球出发,到达投球区,将球投入9个篮筐(篮筐样式见场地示意图)完成比赛。
2.场地简介2.1以木板和场地纸等搭建而成。
2.2场地长度为240cm,宽度为120cm,主要颜色为黑、白、绿色。
2.3出发区长度为30cm,宽度为30cm.2.4篮框为30cm x 30cm的正方形内均匀分布9个直径为10cm、高为20cm的圆柱形篮筐, 固定篮筐的篮板高40cm,宽度为30cm,篮筐放置在地面上。
2.5篮筐区为以底线中点为圆心直径100cm的半圆。
2.6绿色区域为投球区。
2.7用于投射的球为橙色乒乓球。
3. 机器人要求3.1在启动前,机器人最大尺寸必须在300mm x 300mm x 300mm之内。
3.2机器人只允许使用一个控制器,马达和传感器数量不限。
3.3机器人运行时,参赛队员不得干扰或辅助机器人。
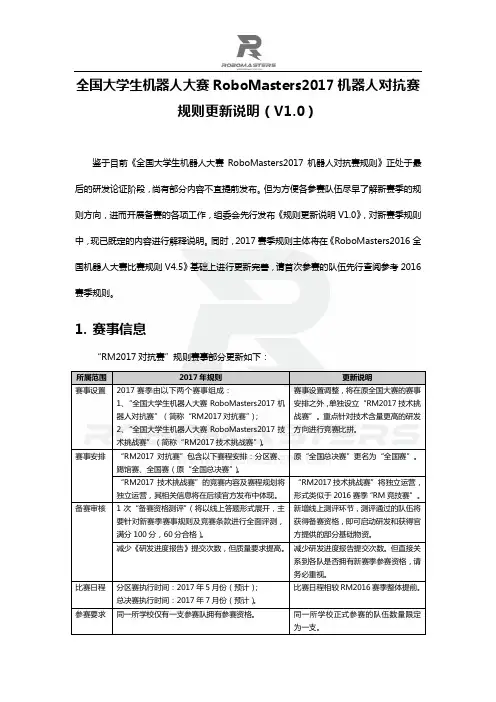
全国大学生机器人大赛RoboMasters2017机器人对抗赛规则更新说明(V1.0)鉴于目前《全国大学生机器人大赛RoboMasters2017机器人对抗赛规则》正处于最后的研发论证阶段,尚有部分内容不宜提前发布。
但为方便各参赛队伍尽早了解新赛季的规则方向,进而开展备赛的各项工作,组委会先行发布《规则更新说明V1.0》,对新赛季规则中,现已既定的内容进行解释说明。
同时,2017赛季规则主体将在《RoboMasters2016全国机器人大赛比赛规则V4.5》基础上进行更新完善,请首次参赛的队伍先行查阅参考2016赛季规则。
1.赛事信息“RM2017对抗赛”规则赛事部分更新如下:指导教师增加内容:“在参赛期间,指导教师须积极配合组委指导老师职责增加。
2.规则及机器人2.1获胜条件,以优先级排序:第一优先级:对方基地摧毁,比赛立即结束,己方获得胜利;第二优先级:对方除基地外的机器人全部摧毁,比赛立即结束,己方获得胜利;第三优先级:比赛时间到基地剩余血量高获胜;第四优先级:如果基地血量相同,全队机器人剩余总血量高获胜。
2.2机器人及规则登岛或者登岛取弹分发给其他机器人,以及维13信道组网通信。
公路直通两个启动区的平路。
2障碍放置区放置障碍物的地方。
2大符机关神符视觉识别打击,攻击力增强。
2升级为新版,大符顶部显示随机数,大符九宫格图案变为随机变化数字,依次输入顶部显示随机数,成功后激活大符。
加弹机构定时给补给站发放弹丸。
2 定时发放弹丸。
障碍物放置在障碍区,阻挡敌方进入。
30 克制打完大符攻击基地。
资源立柱每方远端的停机立柱,飞机占领后全队每秒恢复一定血量。
2立柱四周有装甲,一定时间内击中补血停止。
战损效果基地顶部装甲受到攻击,底盘断电若干秒,底盘运动受限。
该效果侧重于受打击时的效果呈现,类似于电竞中的“冰冻效果”。
注:具体比赛规则以官方最新发布的正式版《比赛规则手册》为准。
全国大学生机器人大赛RoboMasters组委会2016年9月30日。
第八届江苏省大学生机械人大赛1:10无人车多车交互赛竞赛规那么2017年9月15日目录一、项目简介二、技术委员会三、资格评定四、竞赛内容五、竞赛流程六、裁判设置七、计分细那么八、其它1:10无人车多车交互赛竞赛规那么一、项目简介一、竞赛项目1:10无人车(以下简称无人车)多车交互赛要紧考察无人车大体的自主行驶能力。
行驶期间必需遵守现行交通法规。
依照竞赛计分及完成时刻计算排名及设置奖项,并遵从大赛通知的有关规定。
竞赛项目一:超车与会车该项目要紧考察无人车在行车进程中对同向龟行车实施超车(可借道),和与对向车辆完成会车动作后继续行驶通过终点。
竞赛项目二:锥形标+道路标线识别该项目要紧考察无人车在行车进程中对锥形标可否正确识别并避障,和识别道路交通标线正确减速并在人行横道线前停车5秒后继续行驶通过终点。
二、参赛队及参赛车辆具有独立法人资格的单位能够独立组队参加竞赛,每单位最多可派出3支参赛车队(以下简称参赛队),每队现场参赛队员不得超过3人,每参赛队预备1辆(或以上)无人车参赛,参赛期间不得改换车辆,且不得利用其他参赛队车辆,违者取消参赛成绩并上报组委会通报批评。
竞赛上场顺序由现场抽签或报名时刻前后顺序决定。
竞赛开始前通过试车进行参赛车辆资格评定,试车顺序同竞赛上场顺序。
通过资格评定的车辆方能上场参加竞赛。
竞赛进程中,人为干扰其他参赛队伍正常竞赛或不服从裁判员指挥治理的个人或参赛队,一概取消其参赛队竞赛资格,先前成绩作废。
3、场地条件竞赛路段为6张木工板(长米×宽米×厚厘米)纵向拼接而成,沿长度方向裁切约12厘米宽作为路外挡板,在终点线外约米处设置与路边挡板等高约10厘米的路端挡板。
双向两车道,车道宽45厘米,标画有中线(虚、实线)、边线(实线)、减速标线、停车线、人行横道线,线宽均为2厘米,人行横道线线宽4厘米,长50厘米,间距5~6厘米(误差均为±2毫米)。
路面及挡板涂刷黑色哑光漆,标线为白色亮光漆。
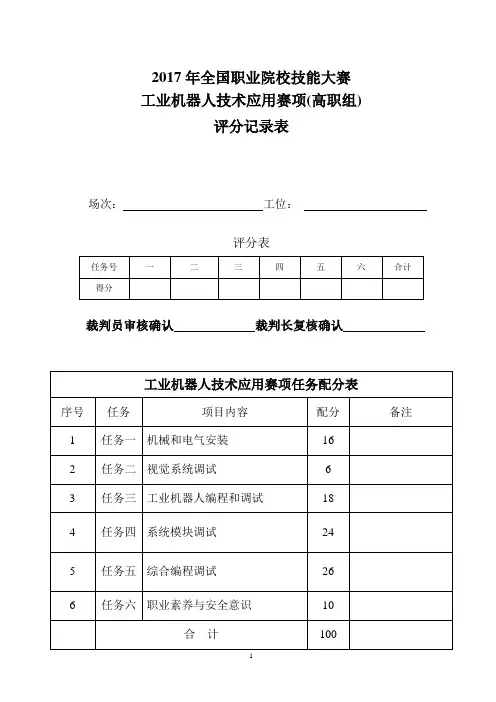
2017年江苏省高等职业院校技能大赛“工业机器人技术应用”赛项竞赛规程一、赛项名称工业机器人技术应用二、竞赛目的赛项以“中国制造2025”规划为背景,针对装备制造业转型升级对岗位技能提升的要求,通过技能大赛,展示参赛选手维护、调试、操控机器人的技能,检阅参赛队组织管理、团队协作、工作效率、质量与成本控制、安全意识等职业素养;引导职业学校关注行业在“工业机器人技术应用”方面的发展趋势及新技术的应用;促进工学结合人才培养模式和课程的改革与创新;促进机器人技术(机器人设备安装、调试、维护、使用)的普及;提升高职院校专业教师的指导水平;以赛促教,为工业机器人及系统在企业中的应用提供人才保障。
三、竞赛方式竞赛为团体赛。
每支参赛队最多由6人组成,其中领队1人(可由指导教师兼任),参赛选手3人(其中队长1人),指导教师2人。
四、竞赛内容参赛选手在规定时间(4小时30分)内,以现场操作的方式,根据赛场提供的有关资料和赛项任务书,完成基本赛项任务及综合赛项任务。
基本赛项任务:1.生产线空间位置调整、传感器安装及基本功能调试。
2.六关节机器人手爪的安装及手爪控制设备的安装调试。
3.六关节机器人参数设定、标定、现场示教编程及复现;六关节机器人安全工作区间建立。
4.AGV机器人上部输送线安装与调试;工业以太网络连接等。
5.按任务要求完成机器视觉系统的设定、流程编辑,实现工件流水线上工件形状和种类的识别、工件库建立及坐标变换。
6.完成满足控制要求的立库码垛机和主控系统的人机界面及PLC 控制程序编制。
7.主控PLC、HMI、六关节机器人、产线、立体仓库的网络建立和程序联调测试。
综合赛项任务:1.由裁判将工件(应大于需抓取的各类型工件数量)随机摆放到立库各仓位中,参赛选手对照工件类型进行工件入库登记。
2.登记完成后,启动系统运行。
立库码垛机根据赛项任务书的要求,按照摆放要求依次抓取需要进行包装的工件,并放置到磁导AGV小车上。
“长庆杯”第二届全国大学生机械创新设计大赛决赛评审结
果
“长庆杯”第二届全国大学生机械创新设计大赛决赛于2006年10月19日至10月22日在湖南省长沙市,湖南大学举行。
大赛评委会通过审阅设计资料、观摩实物演示和进行作品答辩等程序,依据评分标准进行评分,并经评审委员会全体会议复审,共评出一等奖24项、二等奖36项、三等奖63项。
大赛组委会还评出优秀组织奖15项、贡献奖2项、赞助奖2项、纪念奖1项、会标设计特别奖1项。
现将决赛评审结果公布如下:
设计奖:(见下表,排名不分先后次序)
优秀组织奖:
湖南大学
(以下排名不分先后次序)
湖北赛区江苏赛区北京赛区广东赛区
辽宁赛区陕西赛区安徽赛区吉林赛区
福建赛区四川赛区山东赛区江西赛区
黑龙江赛区广西赛区
贡献奖:
湖南长庆机电科教有限公司
湖南长丰汽车制造股份有限公司
赞助奖:
扬动股份有限公司
北京中教仪科技有限公司
纪念奖:
湖南大学
会标设计特别奖:
湖南大学设计艺术学院欧静老师
全国大学生机械创新设计大赛组委会
高等学校机械基础课程教学指导分委员会(代章)
2006年10月22日。
“机器人跳高/跳远”项目比赛规则一、总体介绍二、场地与环境三、机器人四、比赛规则五、其他附录:比赛场地示意图一、总体介绍“机器人跳高/跳远”竞赛项目分为“机器人跳高”和“机器人跳远”两项内容。
要求参赛机器人以规定动作进行跳高或跳远,以跳越的高度或距离成绩计算比赛名次。
机器人跳高:要求参赛机器人以规定动作进行跳高,且机器人起跳及落地后不得变形、分离、散架,并可继续正常工作,以弹跳跨越的高度成绩计算比赛名次。
机器人跳远:要求参赛机器人以规定动作进行跳远,且机器人起跳及落地后不得变形、分离、散架,并可继续正常工作,以跳越的距离成绩计算比赛名次。
本项目的目的是让学生设计与制作更好、更耐冲击、具有良好弹跳越障能力的移动机器人,有优秀的硬件系统与软件系统,特别是在弹跳原理与机构上有一定的创新与制作能力。
二、场地与环境1、场地比赛场地范围大体为2m×8m。
场地的表面为普通体育场馆内木质地板,上覆盖有绿色地毯,边界由不确定高度的边框围成。
助跑跑道长4米、宽1米,跑道两侧是宽度约为24mm的白线,用以约束机器人起跳方向与助跑;跑道中间有一条宽度约为24mm的白色中心线,可用于引导机器人运动方向(机器人也可以不使用)。
这些白线可能存在高度为1mm左右的台阶。
比赛的起跳点(线)为一条宽度为24mm的白线;距起跳点(线)约0.8米有一条白线,为起跳提醒点(线),用以提醒机器人还有0.8米的距离即到起跳点(线),为起跳做准备。
白线可能存在高度为1mm左右的台阶。
跳远降落区铺有四块标准体操垫,外包牛津面或帆布面、内部为再生海绵,四块拼在一起的尺寸为长度为4米、宽度2米、厚度约0.1米(实际尺寸会有一定的误差),紧贴起跳点(线)铺放,上面铺有白色纸张,用以记录机器人落地点,方便裁判测量距离。
跳远落地区域比助跑跑道略高一个标准体操垫的高度,约0.1米(实际尺寸会有一定的误差)。
跳高栏宽度大约1.2米,横杆高度由裁判根据参赛队要求可进行调整。
2017年校园科技文化节八足机器人评比项目2017年校园科技文化节八足机器人评比项目一、引言在当今科技高速发展的时代,机器人已经渗透到了日常生活和各个领域中。
而在校园科技文化节上,八足机器人评比项目成为了一项备受关注的活动。
本文将从不同的角度剖析2017年校园科技文化节八足机器人评比项目,探讨其背后的意义和价值。
二、项目概述2017年校园科技文化节八足机器人评比项目是在校园科技文化节上举办的一项比赛活动,旨在鼓励学生利用科技手段来创造和设计八足机器人,并在比赛中展示其性能和功能。
参与者需要根据规定的要求,设计并制作能够完成特定任务的八足机器人,并在比赛中进行表演和竞技,以展示他们的创造力和技术水平。
三、评比项目意义和价值1. 推动学生对科技的兴趣和热情通过参与八足机器人评比项目,学生将有机会深入了解机器人技术和科学原理,从而激发对科技的兴趣和热情。
他们需要动手实践和思考,培养了解决问题和创新的能力,为未来的科技发展培养了更多的人才。
2. 提升学生动手能力和团队合作意识在设计和制作八足机器人的过程中,参与者需要动手操作、编程调试、机械组装等,提升了他们的动手能力和实践能力。
组队参与比赛也能够培养学生的团队合作意识和沟通能力,培养了学生的综合素质。
3. 展示科技成果和鼓励创新八足机器人评比项目为学生们提供了展示自己科技成果和创新成果的舞台,激励他们不断探索和创新。
参与者可以通过比赛展示自己的设计理念和技术能力,获得认可和鼓励,从而更加励志于科技创新的道路上。
四、项目总结和回顾2017年校园科技文化节八足机器人评比项目在多个方面都取得了成功。
参与者的创意和设计水平得到了充分展示,学生们在设计制作八足机器人的过程中获得了难得的锻炼和成长。
比赛也为学校带来了科技氛围和创新意识,促进了学校科技文化的建设和发展。
这样的活动不仅激发了学生的学习兴趣,还为学生的未来职业发展提供了宝贵的经验和机会。
五、个人观点和理解作为项目的撰写者,我个人对2017年校园科技文化节八足机器人评比项目充满期待和认可。